
Игрушка для кота на arduino
Обновлено: 07.05.2024
Есть у нас в семье кошка по имени Киса. Молодая, а также трусливая и любопытная одновременно. Единственное, что начисто отбивает у нее всю трусость – это красное лазерное пятнышко от бошевского дальномера. Она готова охотиться за ним безоглядно. Но. У дальномера есть ограничение по времени работы, батареек на него не напасешься, да и влом на длительные игры с кошкой время терять.
Находил на просторах интернета всякие автоматические кошачьи дразнилки – дорого, да и функционал ограничен. Опять же, нет гарантии, что лучик не попадет на занавески, и они не будут при этом подраны вдрызг.
Или мы не инженеры-электронщики-ардуинщики?! А самому собрать?
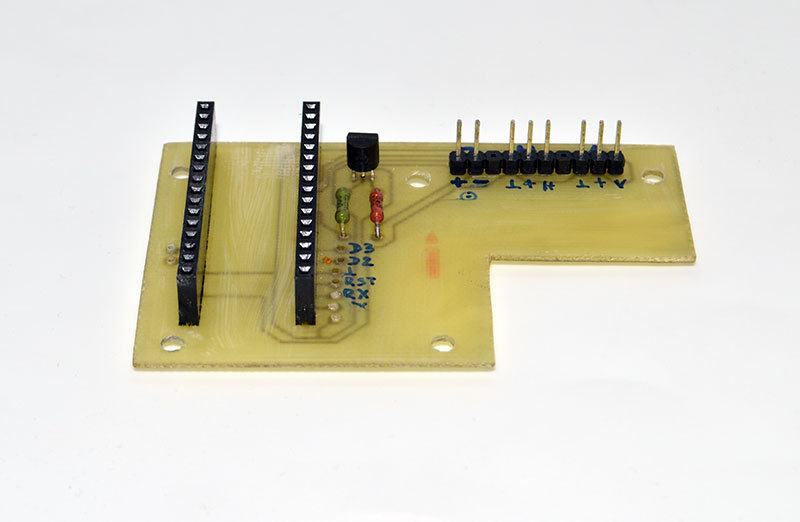
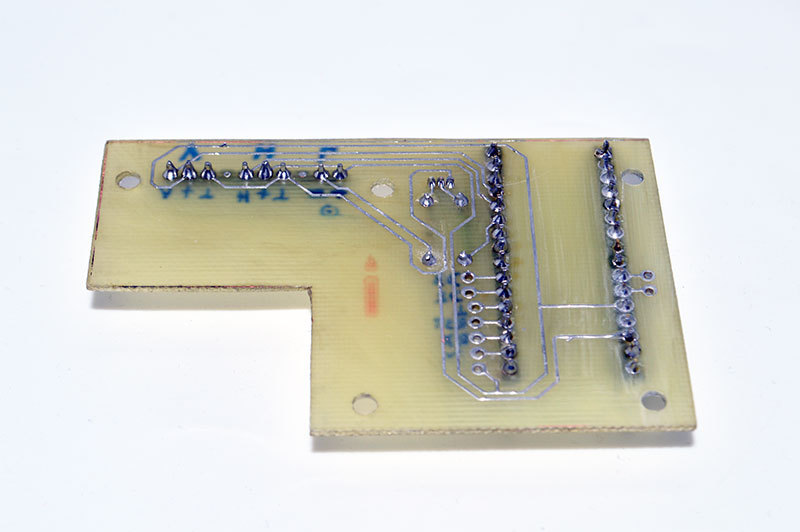
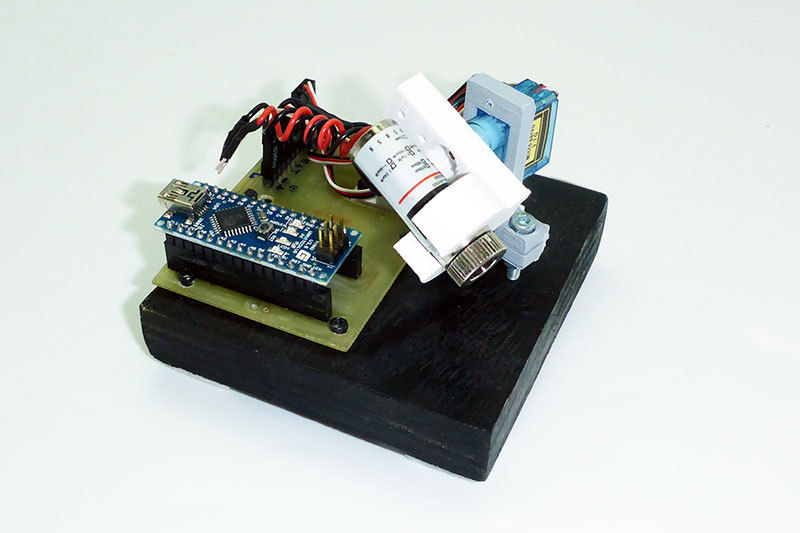
Сначала взял железо: Arduino Nano, пару сервомашинок простеньких (можно в наборе с Arduino в Мастер-Кит приобрести) и красный полупроводниковый лазер от завалявшейся указки с апертурой пятнышком. ЛУТом в момент сделал платку, чтобы сервы было куда воткнуть, ну и ключ на транзисторе для лазера, чтобы ардуиновский пин не перегружать.
Принципиальная схема устройства:
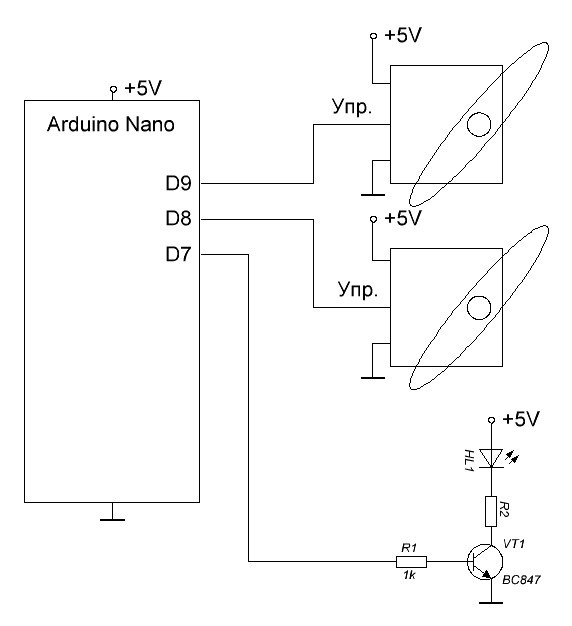
В Arduino Nano втыкается обычный USB-mini из любого блока питания на 5 В. Ну, или в компьютер для заливки скетча.
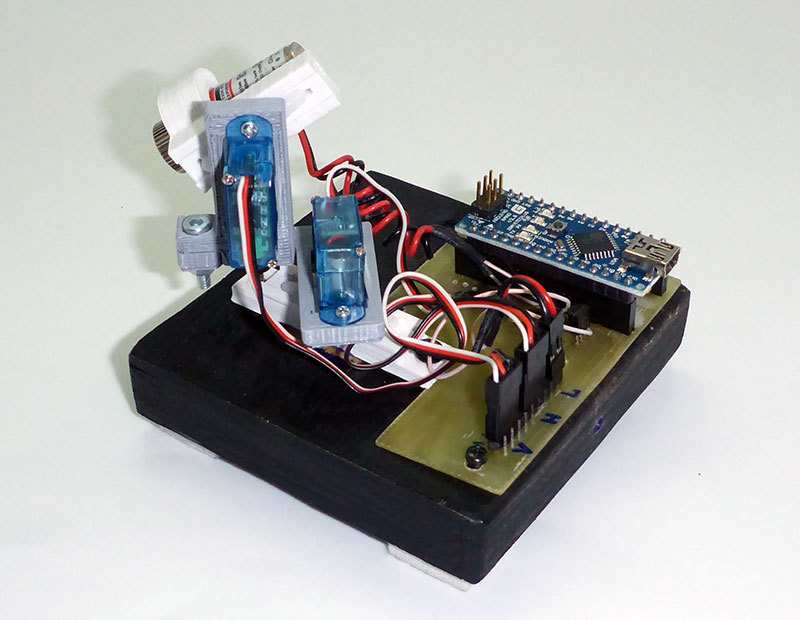
Конструкцию хотелось сделать, конечно, как можно проще в изготовлении. Помог 3D-принтер. Вот поистине выручалочка для домашних умельцев! Очень понравилось печатать небольшие детали вместо того, чтобы пилить их напильником. За час MC5 D.R.O.V.A. напечатал четыре детальки для двухкоординатного поворотного устройство. Сам процесс печати настолько завораживает, что час этот пролетел вообще незаметно!
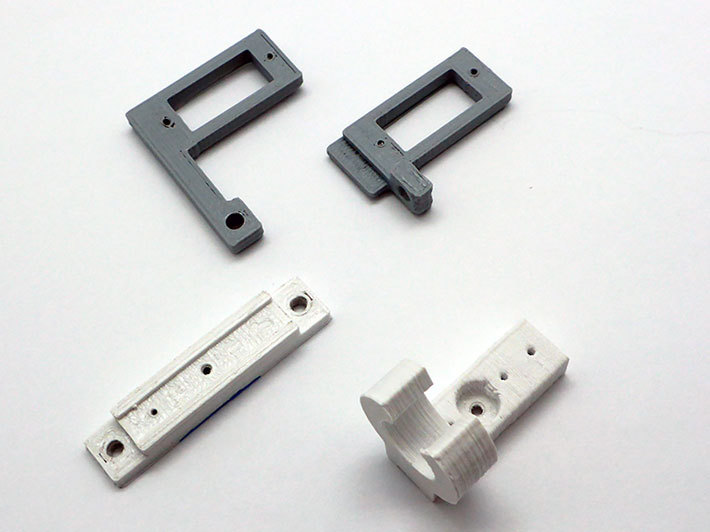

Собранное поворотное устройство вместе с платой крепим на обрезке крашеной фанеры. Это хозяйство и будем программировать.
Вот тут самое интересное. Надо заинтересовать кошатину нестандартным движением пятнышка, дабы она не теряла интерес, и обезопасить обои и занавески от когтей.
Экспериментальным путем после некоторого количества экспериментов были выбраны следующие принципы движения объекта охоты:
— шевеление лазером происходит не постоянно, а со случайными остановками с выключением пятнышка, при этом животное нервно озирается в его поисках;
— траектория движения меняется от сеанса к сеансу опять же случайным образом;
— размах движения тоже меняется в рамках заданной траектории;
— после перемещения в конец траектории точка замирает, чтобы зверь мог ее затоптать в попытке схватить;
— пятно не должно попадать на стены и занавески, только на пол!
Побаловавшись с простейшими движениями типа линия и квадрат от точки к точке попеременными движениями сервомашинок, захотелось реализовать и более сложные траектории. После недолгого гугления остановился на старом добром алгоритме DDA-линии, растеризующим отрезок прямой между двумя точками. То есть, задаем функцию траектории, задаем абсциссу, вычисляем ординату, и перемещаем лазер мелкими последовательными шагами по двум координатам в новую точку. Траектории сделал, какие в голову пришли: веер, синусоида, сектор, квадрат и т.п. Можно и более сложные функции рисовать, если кому охота.
Под спойлером полный текст работающего на данный момент скетча:
// экспериментально выбираем безопасную зону перемещения пятна
int minv = 85; //10; // крайнее нижнее положение пятна
int maxv = 115; //55; // крайнее верхнее
int minh = 90; //45; // крайнее левое, смотреть спереди
int maxh = 145; //120; // крайнее правое, смотреть спереди
unsigned long DelayBetweenMovements = 1000; // задержка в мс
unsigned long second = 1000; // одна сек. = 1000 мс
Servo myservo_ver; // перемещение по вертикали
Servo myservo_hor; // перемещение по горизонтали
void setup()
<
pinMode(laser, OUTPUT);
pinMode(led, OUTPUT);
digitalWrite (led,HIGH);
ServoOn();
myservo_hor.write((maxh + minh)/2); // устанавливаем лазер
myservo_ver.write((maxv + minv)/2); // в среднее положение
delay(2000); // и пару секунд смотрим
//-Main----------------------------------------------
void loop()
randomSeed(analogRead(0)); // инициализация random случайным значением с порта 0
int g = random(1,7); // выбираем случайно одно траекторию из семи
randomSeed(analogRead(0));
int tg = random(1,3); // выбираем случайно длительность сеанса 30, 60 или 90 сек
DelayBetweenMovements = second * random(1,5)/2; // выбираем случайно время перемещения между точками траектории
switch (g) <
case 1: GameRandom(tg*30*second); break;
case 2: GameFan(tg*30*second); break;
case 3: GameFan1(tg*30*second); break;
case 4: GameFan2(tg*30*second); break;
case 5: GameCorners(tg*30*second); break;
case 6: GameSinHor(tg*30*second); break;
case 7: GameSinVer(tg*30*second); break;
>
delay(random(10,60)*second);
void ServoOn(void) < // задействовать сервы и включить лазер
myservo_ver.attach(9); // серво по вертикали присоединить на цифровой pin 9
myservo_hor.attach(8); // серво по горизонтали присоединить на цифровой pin 8
digitalWrite (laser,1); // включаем лазер
>
void ServoOff(void) < // отключить сервы и лазер — отдыхаем
myservo_ver.detach();
myservo_hor.detach();
digitalWrite (laser,0);
>
// переместить из текущей точки х1, y1 в точку x2, y2 с задержками между шагами delay_ms
void servo_move(double x2, double y2, int delay_ms)
double x1 = myservo_hor.read(); // читаем текущее положение серв
double y1 = myservo_ver.read();
int iX1 = round(x1); // округляем координаты
int iY1 = round(y1);
int iX2 = round(x2);
int iY2 = round(y2);
// Длина и высота линии
int deltaX = abs(iX1 — iX2);
int deltaY = abs(iY1 — iY2);
// Считаем минимальное количество итераций, необходимое
// для отрисовки отрезка. Выбирая максимум из длины и высоты
// линии, обеспечиваем связность линии
int length = max(deltaX, deltaY);
if (length == 0) return;
// Вычисляем приращения на каждом шаге по осям абсцисс и ординат
double dX = (x2 — x1) / length;
double dY = (y2 — y1) / length;
// Начальные значения
double x = x1;
double y = y1;
// Основной цикл
length++;
while (length--)
x += dX;
y += dY;
myservo_hor.write(x);
myservo_ver.write(y);
delay(delay_ms);
Первый лазер вышел из строя через неделю – отломились выводы, хоть и сделаны они из многожильного провода. У второго отформовал выводы спиралью. Помогло. Можно еще клея капнуть из клеевого пистолета на место, откуда выводы выходят из корпуса.
Не все адаптеры питания подходят. От некоторых Ардуино не заводится или лазер дергается. Видимо, большие пульсации на выходе. Конденсатор лень было впаивать, просто подобрал хороший адаптер, благо их куча валялась.
Испытано на нескольких кошках. Молодые долго носятся. Постарше – побегают, а потом лежат и смотрят, как пятно шарахается, или на саму машинку пялятся, как она жужжит и шевелится. Лапой машинку не пытались. Но, на всякий случай, придумал кожух из коробки для бумажек.
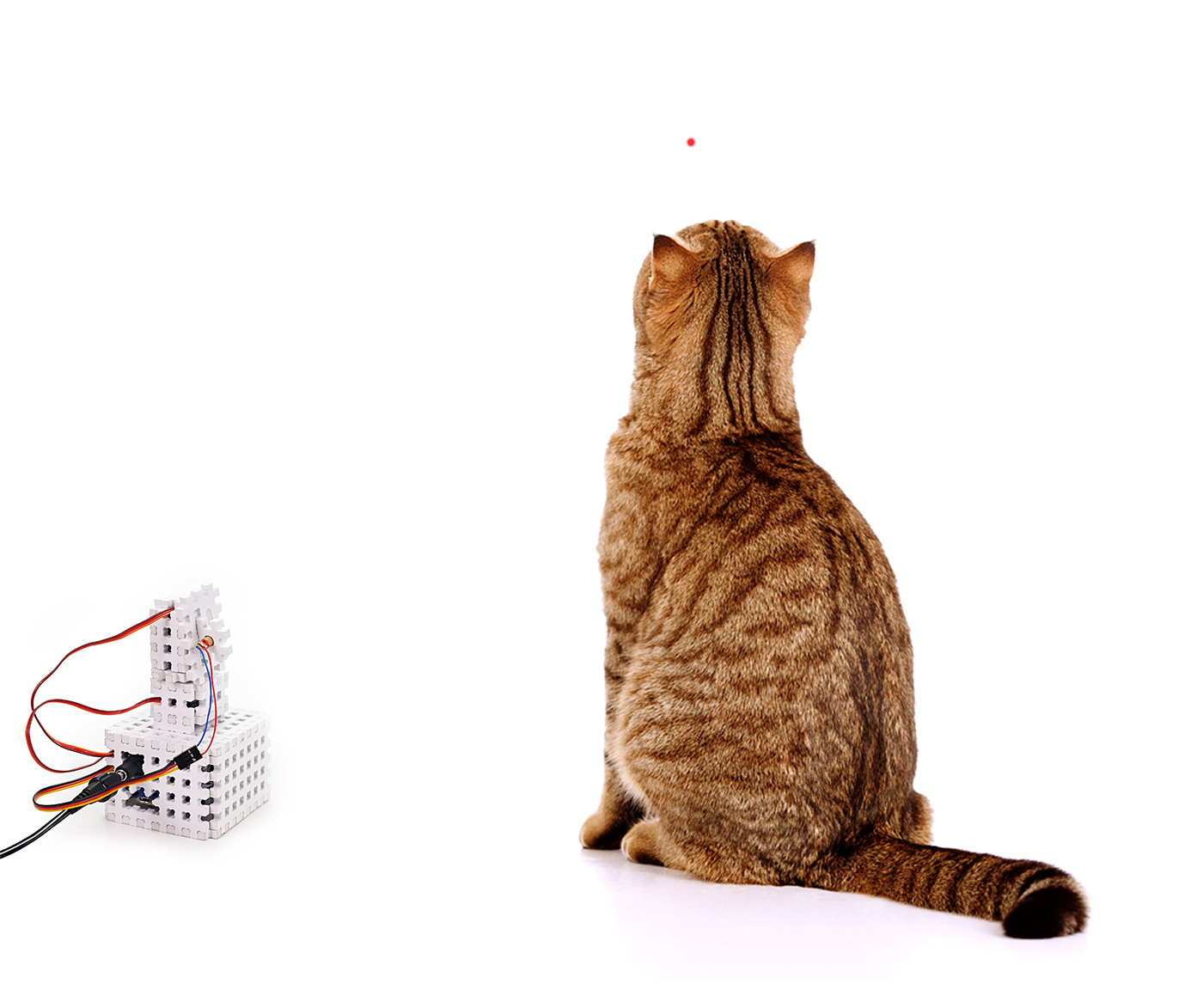
Лазерная указка — пульт управления кошкой. Эта игрушка даже у самых ленивых представителей кошачьих вызывает небывалый охотничий азарт. А какие трюки проделывает питомец, в попытке схватить призрачную добычу! Давайте соберём лазерную игрушку для кошки вашими руками.
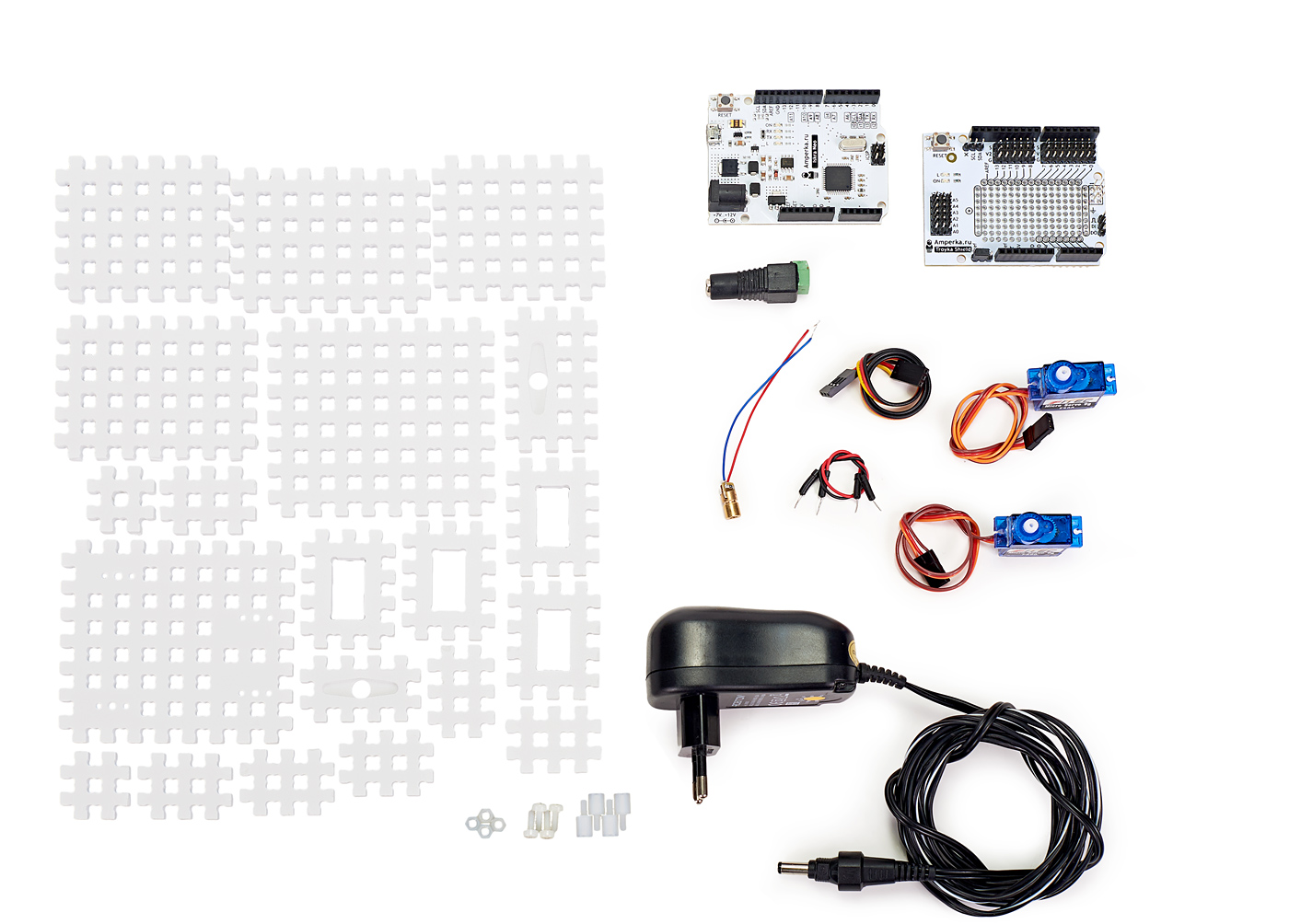
Что нам понадобится?
Как собрать?
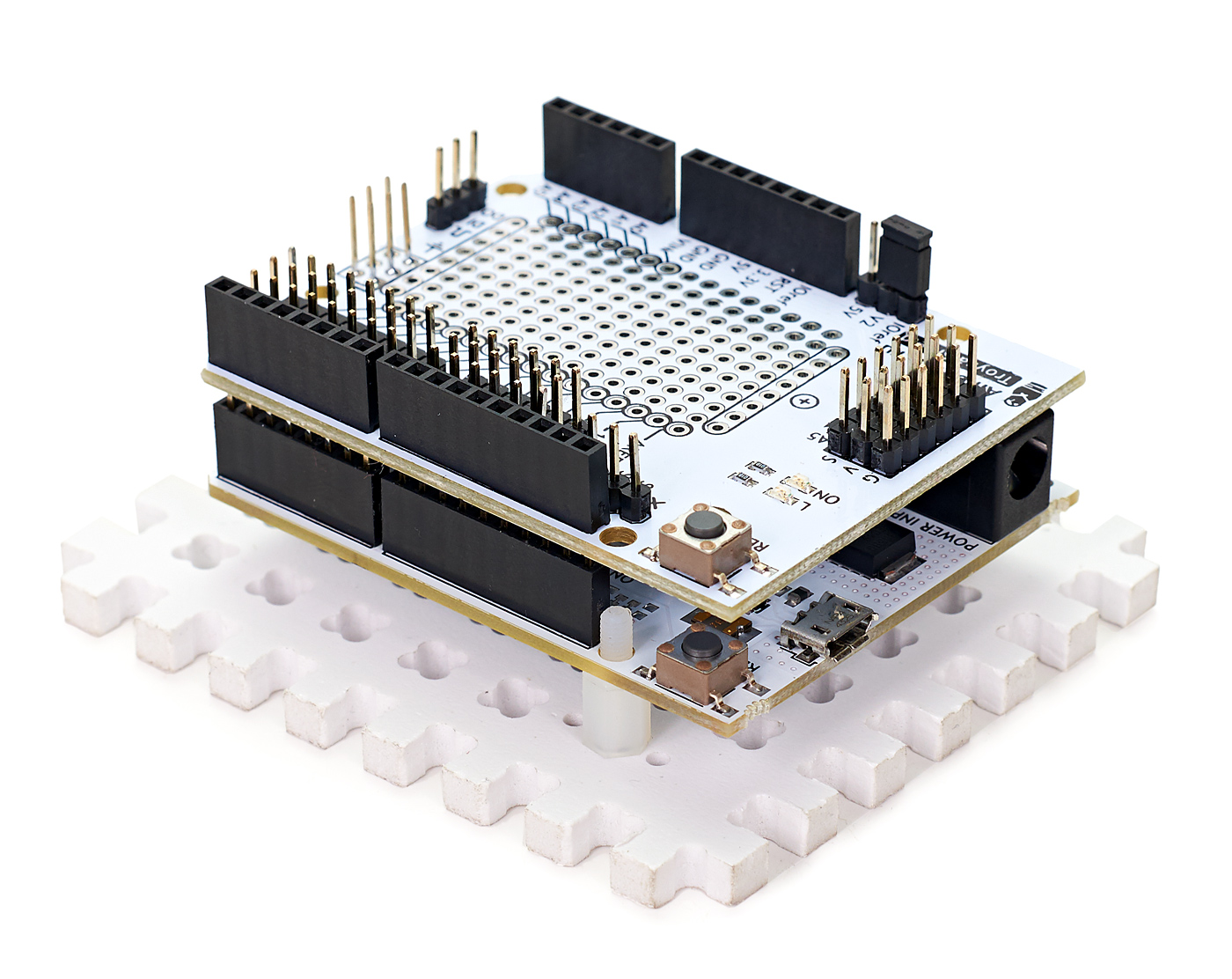
Установите Troyka Shield на плату Iskra Neo.
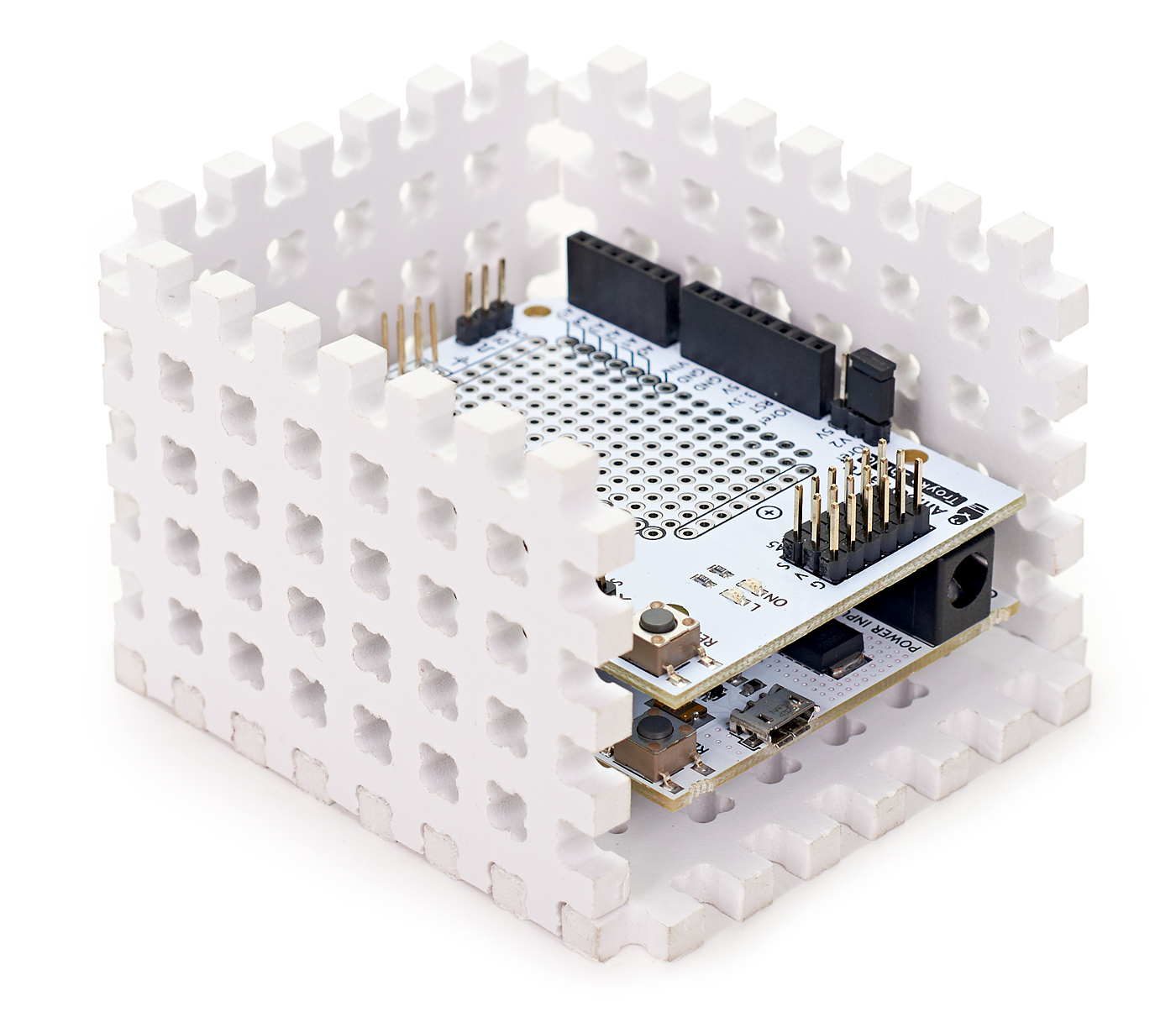
Прикрепите боковые панели («пластины 7×5 шипов») и заднюю панель («пластина 6×5 шипов») к основанию корпуса игрушки («крепление Arduino 7×8 шипов»).
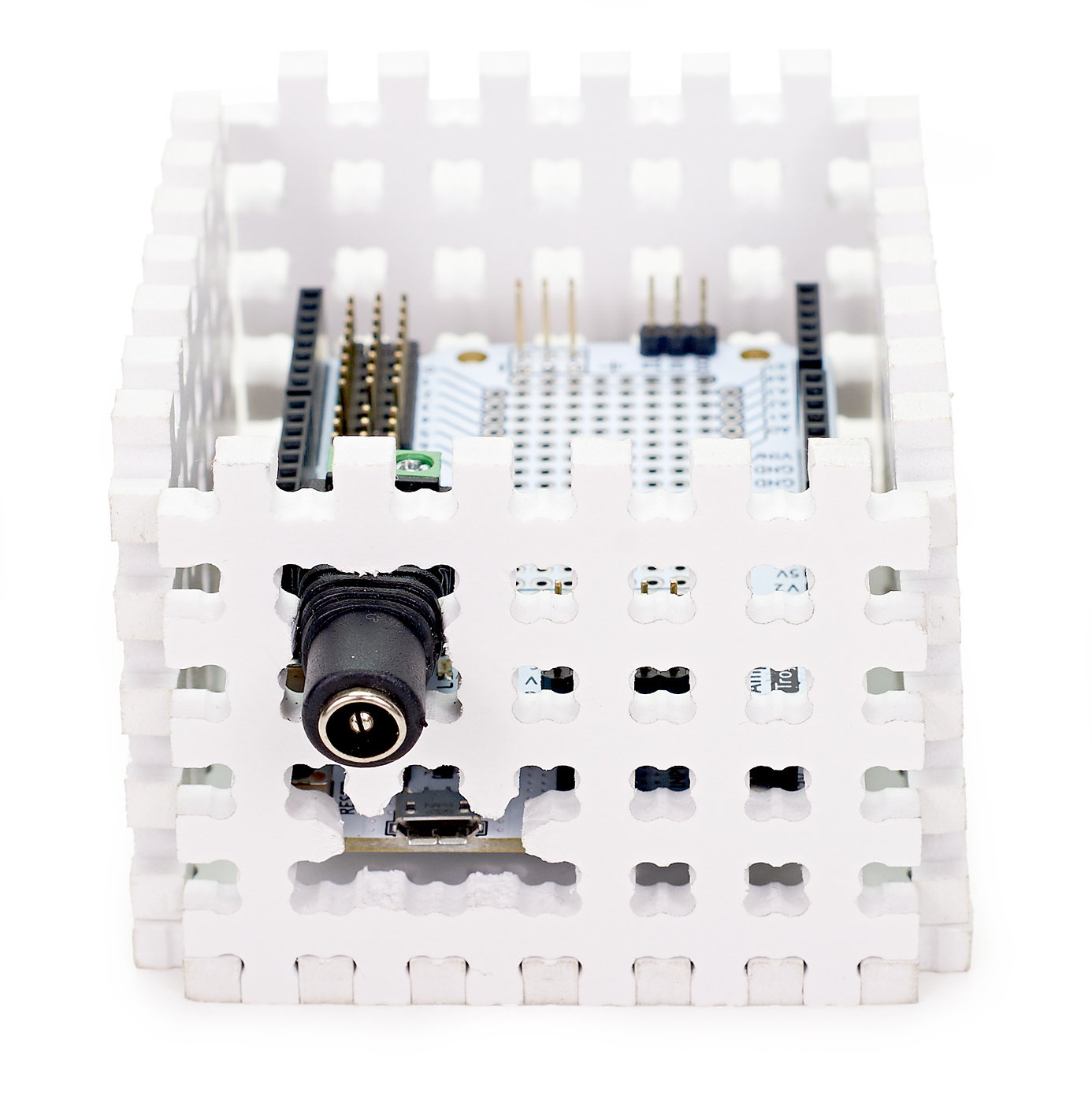
Так как регулятор напряжения, установленный на плате Iskra Neo, не может выдавать ток, обеспечивающий стабильную работу сервомоторов, мы будем запитывать всю конструкцию от отдельного источника питания на 5V через клеммник. Поэтому, перед установкой лицевой панели («пластина 6×5 шипов»), с помощью бокорезов или ножа сделайте в ней отверстие для клеммника и установите его. Также отделите бокорезами секции, мешающие подключению USB-кабеля. Установите лицевую панель бокса на основание.
Если вы не хотите резать деталь, выведете клеммник наружу и закрепите на верхней панели корпуса с помощью стяжек или двустороннего скотча. Доступ к USB можно обеспечить, открывая и закрывая заднюю панель.
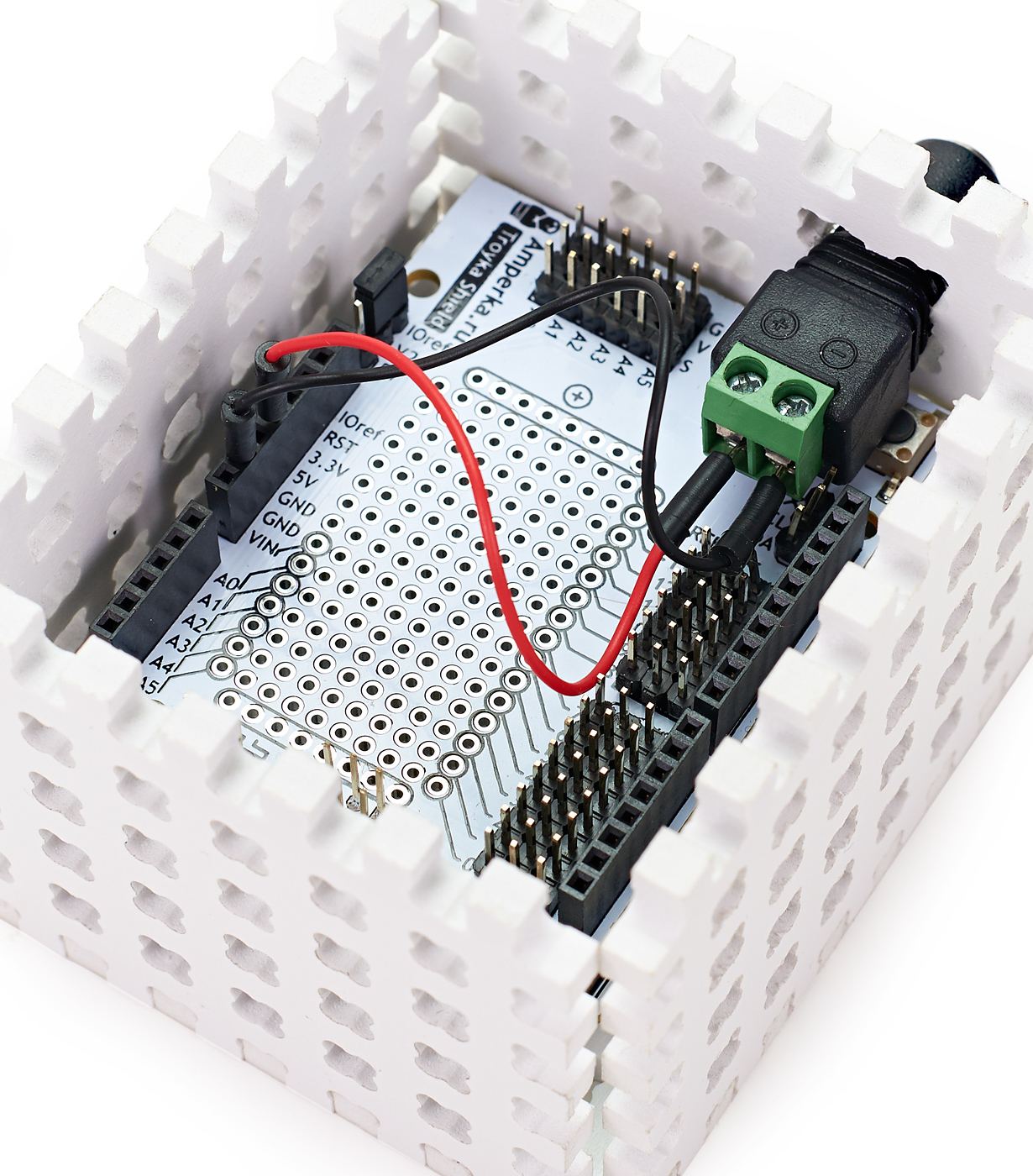
С помощью проводов «папа-папа» соедините пин 5V Arduino с плюсом клеммника, а пин GND Arduino с минусом клеммника.
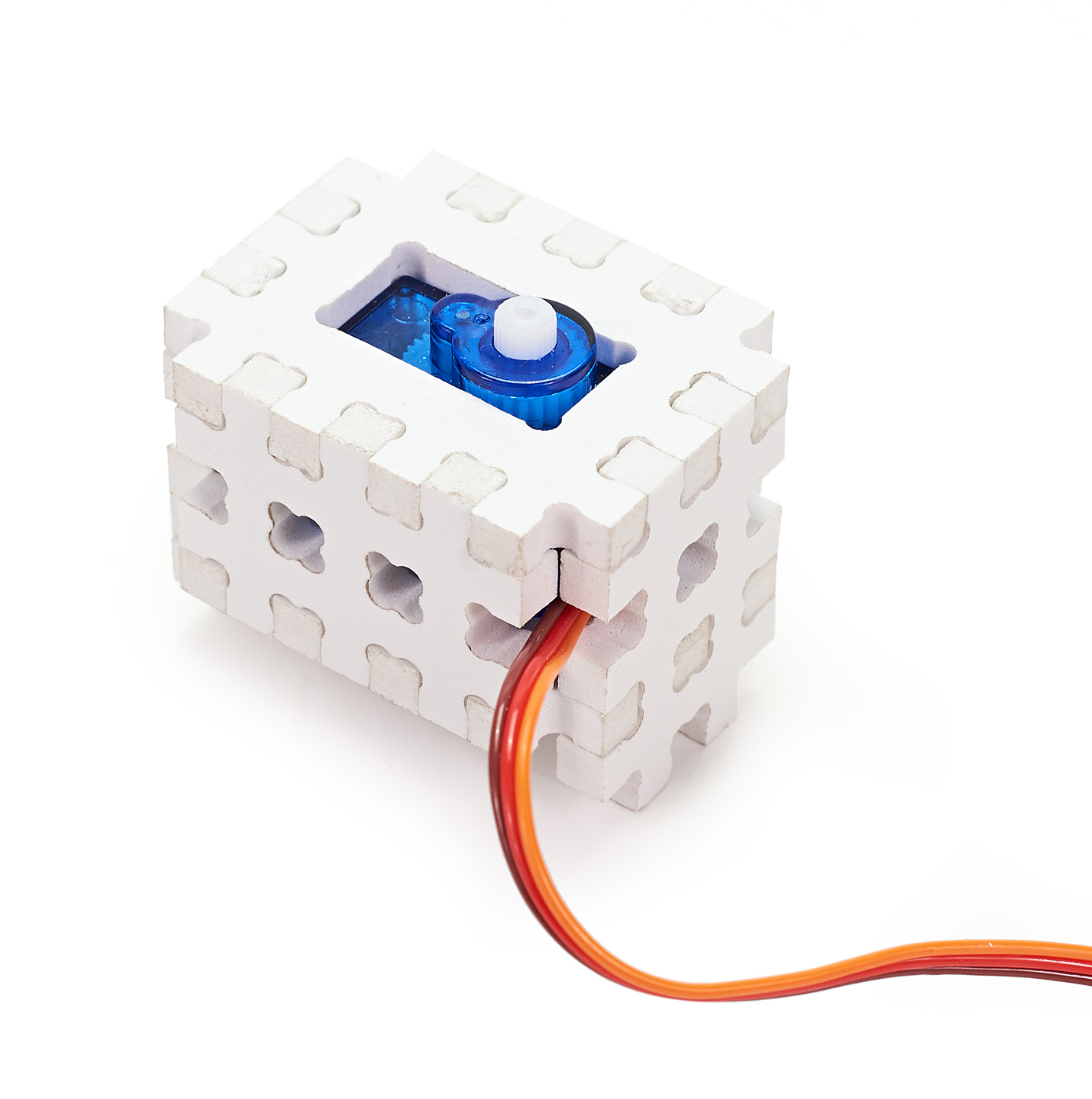
С помощью двух панелей «крепление микросервопривода 3×4 шипа» и четырёх панелей («пластина 2×3 шипа») сделайте «домик» для микросервопривода. Данный мотор будет вращаться по оси X, назовём его «Серво-X».
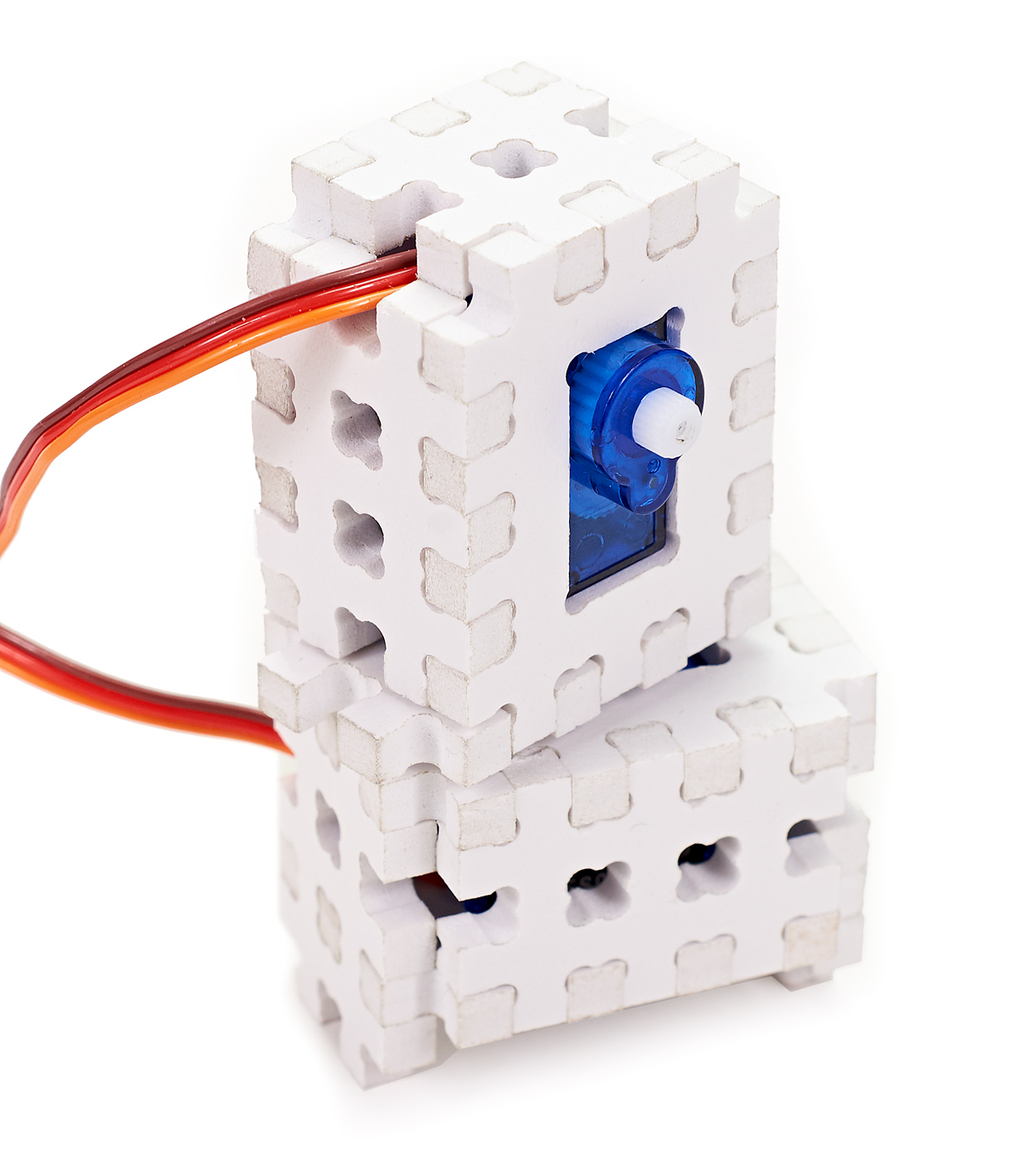
Используя «крепление качалки 2×4 шипа» с первого «домика», две панели «крепление микросервопривода 3×4 шипа» и две панели («пластина 2×3 шипа»), сделайте «домик» для второго микросервопривода. Этот мотор будет вращаться по оси Y, назовём его «Серво-Y».
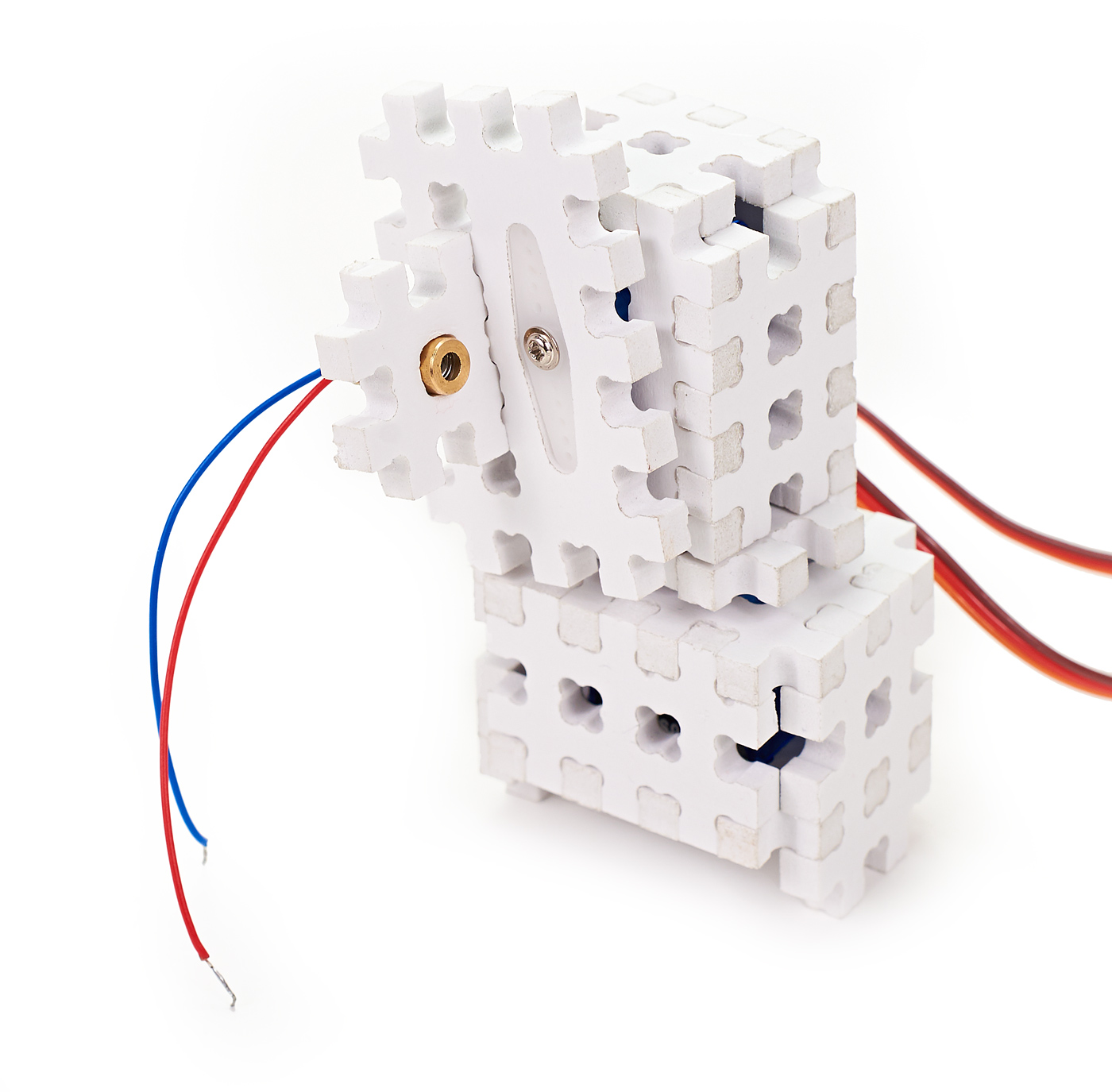
Закрепите лазерный модуль к подвижной панели верхнего сервопривода через «пластину 2×2 шипа». Мы получили двухосевой сустав из сервоприводов.
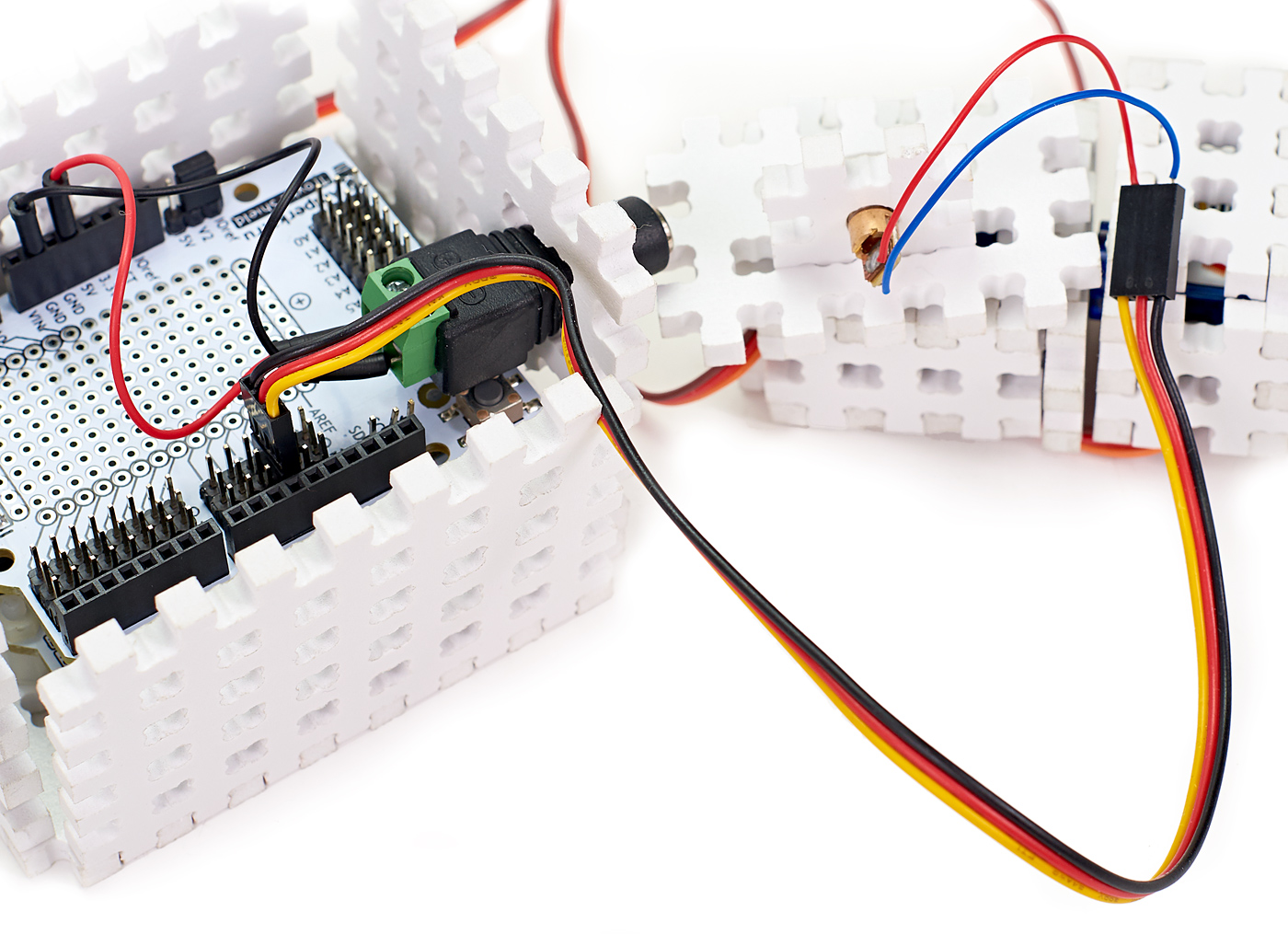
Используя 3-проводной шлейф, подключите лазерный модуль к 11 цифровому пину Troyka Shield.
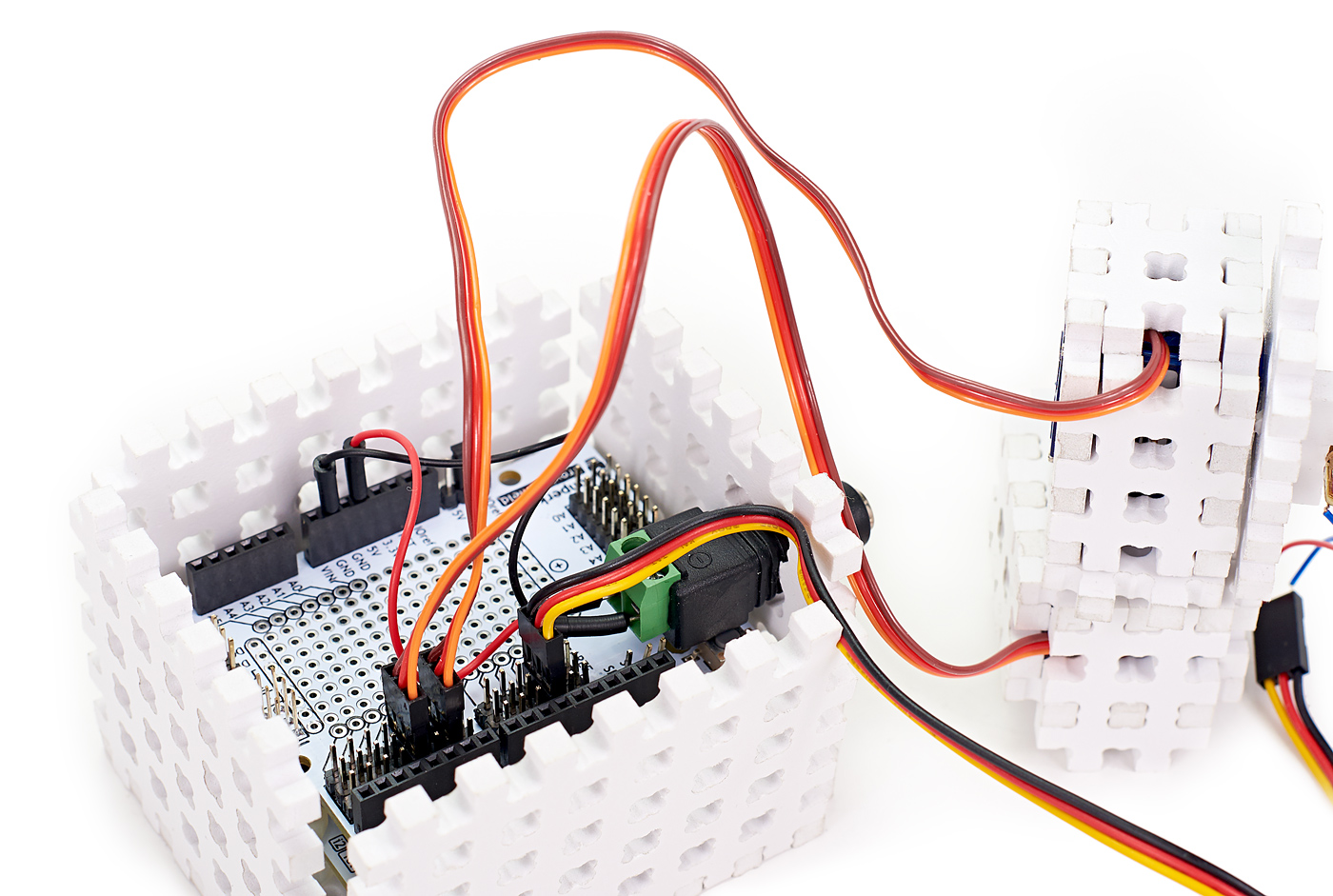
Подключите «Серво-X» и «Серво-Y» через 3-проводные шлейфы к 4 и 6 пину Troyka Shield соответственно.

В результате должна получиться такая схема:
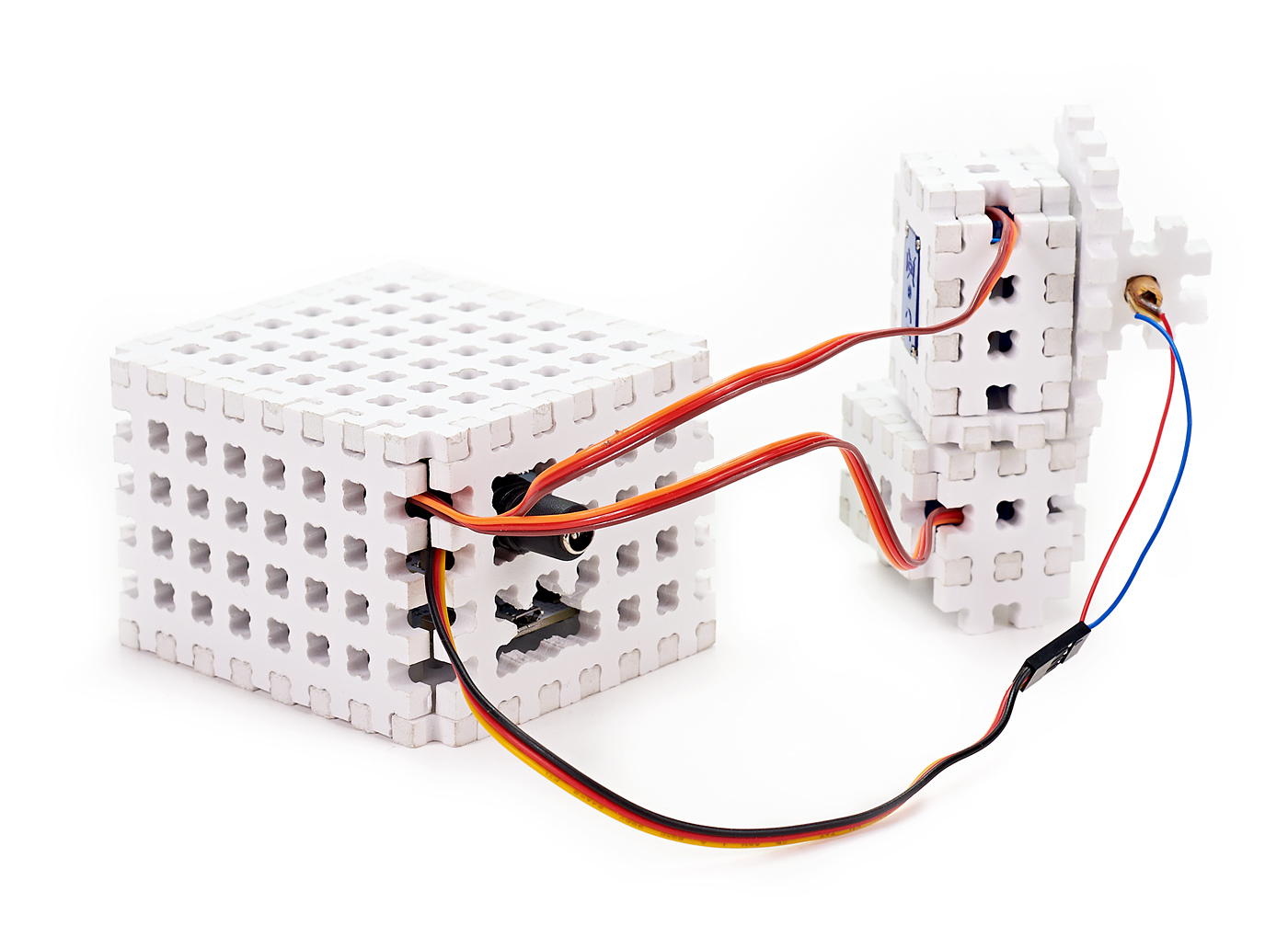
Установите верхнюю панель («пластина 7×8 шипов»), прикрепив её к боковым, передней и задней стенкам корпуса.
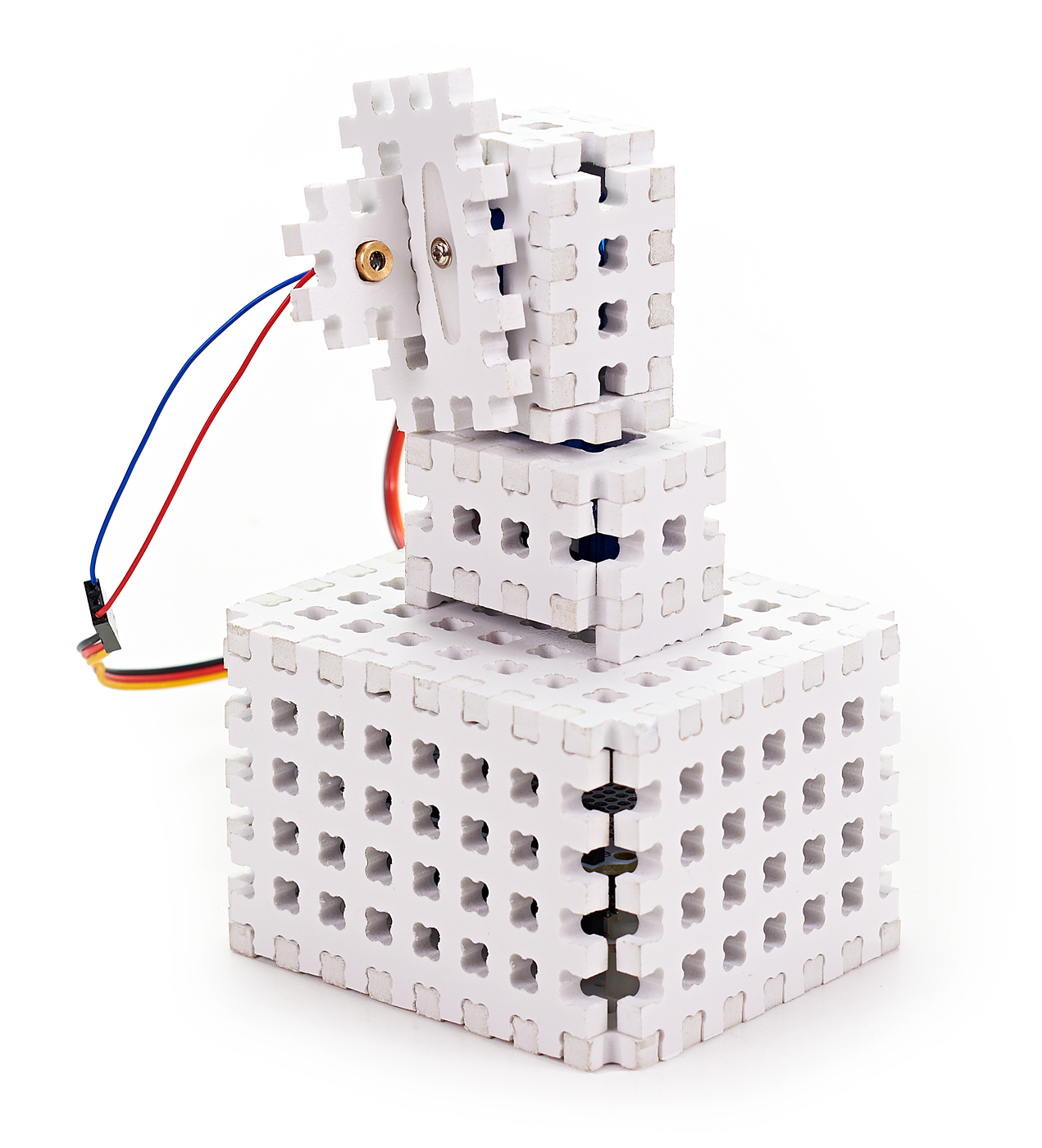
В заключение установите сустав из сервоприводов на верхнюю панель бокса.
Алгоритм
Передвигаем лазерный модуль с большой плавающей скоростью одновременно по двум осям в течении 10 секунд.
Передвигаем лазерный модуль с медленной плавающей скоростью одновременно по двум осям в течении 5 секунд.
Исходный код
Демонстрация работы устройства
Что дальше?
Добавьте в проект Wireless Shield и Bluetooth Bee, и управляйте лазерной игрушкой с мобильного телефона. Привлеките кота звуком с помощью Зуммера (Troyka-модуль). Замените плату Iskra Neo на Arduino Yún, подключите к ней веб-камеру, и наблюдайте за тем как играет ваш питомец где бы вы ни находились.
Если не указано иное, содержимое этой вики предоставляется на условиях следующей лицензии: CC Attribution-Noncommercial-Share Alike 4.0 International
Лазерная игрушка для котенка на Arduino — это простой проект для начинающих с минимальным количеством необходимых деталей. Игрушку для своего кота довольно легко сделать своими руками. Мы представим на этой странице схему сборки проекта с пошаговой инструкцией и представим программу для управления сервомоторами от Arduino, где вы можете подставить свои значения по скорости и времени игры.
Интерактивная лазерная игрушка для кота
Для изготовления игрушки из лазерной указки вам потребуется плата Arduino Uno, лазерный светодиод, два сервомотора, провода, изолента и клей. Стоит предупредить, что, как и любое другое изобретение, данный проект может принести, как вред, так и пользу. С одной стороны, ваш питомец может поиграть с пятном света на стене, с другой стороны недопустимо попадание луча лазера в глаза кошке и человеку.
Игрушка для кошки «лазерная указка» состоит из двух сервоприводов, которые поворачивают лазер по горизонтали и вертикали на разный угол и с разной задержкой времени. Первый сервопривод крепится на клей или термоклей к какому-либо основанию, второй сервопривод приклеивается на качалку (шестерню) первого моторчика. Модуль лазерного светодиода крепится на качалку второго светодиода.
Лазерная игрушка для кошек своими руками
Для этого проекта потребуется:
- Arduino Uno / Arduino Nano / Arduino Mega;
- два сервопривода;
- лазерный светодиод;
- провода «папа-папа»;
- термоклей, изолента, инструмент.
Схема подключения сервоприводов и светодиода представлена на картинке выше. Чтобы сделать конструкцию более надежной, лучше сделать корпус для игрушки на 3D принтере или придумать более надежное крепление к качалкам, так как при резких поворотах сервоприводы могут отклеиться. После сборки конструкции загрузите следующий скетч в плату Arduino Nano или другой микроконтроллер Ардуино.
Скетч для интерактивной лазерной игрушки
Пояснения к коду:
- в программе включение лазерного модуля и запуск счетчика отсчета времени производится один раз в процедуре void setup() ;
- процедура while будет выполняться до тех пор, пока счетчик времени не станет больше заданного количества миллисекунд (minutes * 60000);
- для повторного запуска игры необходимо перезагрузить микроконтроллер.
Еще раз предупредим об опасности попадания лазерного луча в глаза человека или животного. Также следите, чтобы пятно от лазерной игрушки не попадал на вещи, которые котенок может повредить и тем более на открытые окна. Вы можете здесь скачать одним архивом программу для игрушки на Ардуино, а также файлы для изготовления корпуса игрушки на лазерном или фрезерном ЧПУ станке.
Чем только не займешься в новогодние праздники? В этом году подарил своей кошке электронную игрушку на базе лазерной указки, двух сервоприводов и контроллера на базе Mega16. Может сравнить применение Меги в этой схеме со стрельбой по воробьям из пушки, но дома на тот момент была только она. Человеку, имеющему опыт программирования AVR микроконтроллеров не составит труда перенести ее на другую микросхему, вплоть до микроконтроллеров серии Tiny.
Электронная и механическая части.

(рис.1)
В качестве излучателя применен лазерный диод с оптикой от лазерной указки. С нее же взят и токоограничительный резистор номиналом 100 Ом.
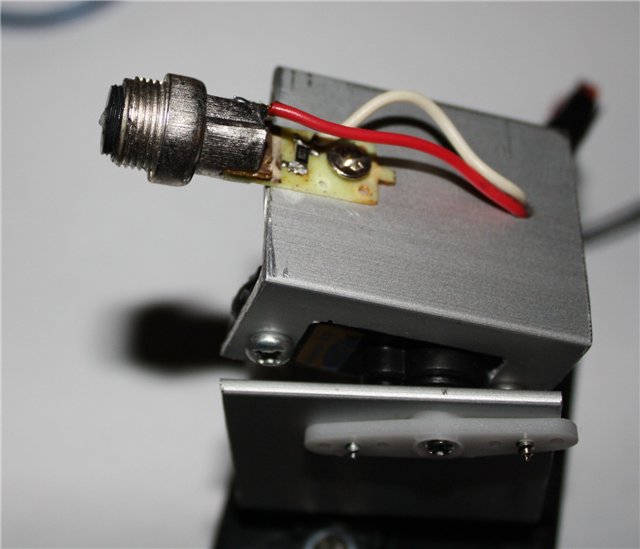
(рис.2)
Механическая часть состоит из двух сервоприводов Corona CS-928BB, купленных в магазине радиоуправляемых моделей. Их можно заменить любыми другими. Сервоприводы соединены между собой следующим образом.

(рис.3)
Для большей жесткости, соединения выполнены из алюминиевого уголка толщиной 1,5 мм.
Управляющий транзистор может быть любым, обратной проводимости. Я нашел дома только КТ805БМ, его успешно и применил.
Питается схема от сетевого выпрямителя через стабилизатор 7805 (5 Вольт, потребляемый ток не более 300 мА).
Программная часть
Сервоприводы вращаются случайным образом в небольшом диапазоне (не более 60 градусов от общего хода), чтобы ограничить положение лазерного зайчика на полу, либо чуть выше. Также реализовано программное выключение излучателя на короткое время (для придания кошке азарта).
За основу взят код из учебного курса по программированию AVR микроконтроллеров — Ссылка.
Файлы проекта на Codevision AVR, разводку печатной платы, схему в Proteus и готовую прошивку можно скачать по ссылке — Проект одним архивом.
В главном цикле программы оставлен код для получения команд по UART, что дает возможность легко переделать прошивку для управления устройством с компьютера.
Привет пикабушники! Моя кошка постоянно просит, чтобы с ней поиграли - и что бы она не скучала - решили сделать автономную лазерную игрушку на arduino. В видео инструкция как сделать такую игрушку самому)
прилагаю схему подключения


Всем добра и игривых кошек =^.^=
Кошка облезшая или ты её лазером спалил?)))
"Молодец" . С кошаками нельзя играть лазером (солнечными зайчиками и т.д.).Для котэ это большой стресс.Игра это имитация охоты и выходит что охота есть ,а добычи нет.
Будь честным, ты же просто спиздил уже реализованную вещь у другого человека.

Сделал парные Интернет-лампы
Скинули мне как-то раз вот такую картинку, с Пикабу кстати.
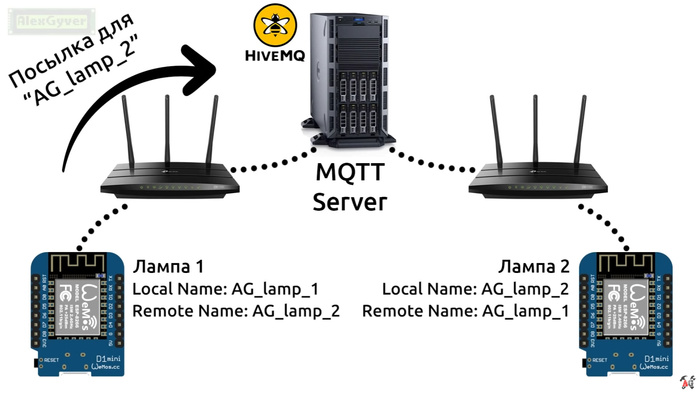
Это - лампы дружбы, которые подключаются к Интернету и могут управлять друг другом, где бы они не находились. Давайте сделаем такие! Благо китайский микроконтроллер стоит 2 бакса, а обмениваться данными можно через бесплатный MQTT сервис.
Нам понадобится светильник из Фикс-прайса

И некоторая электроника. Ссылки на компоненты и вся информация есть на странице проекта у меня на сайте.
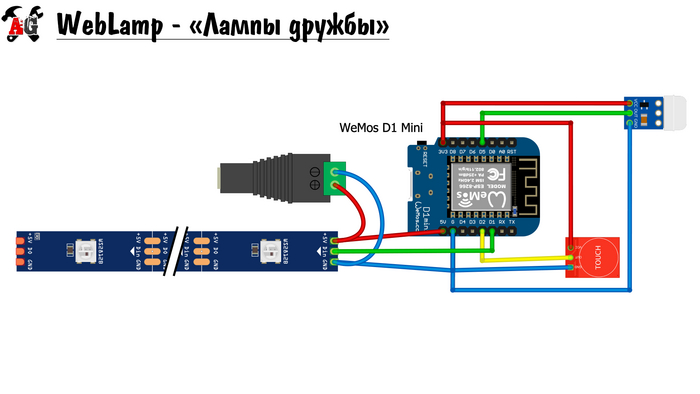
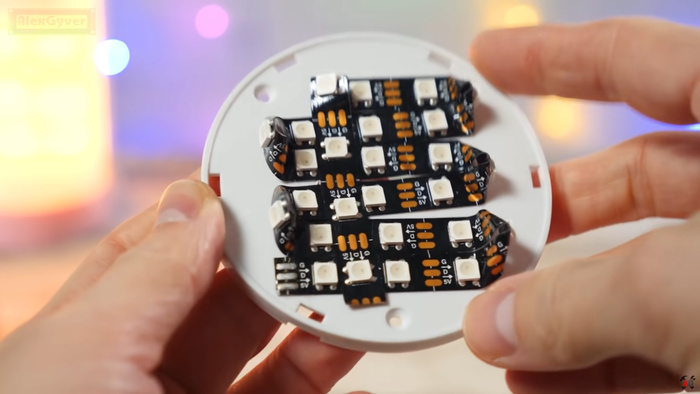
Нужно налепить ленту и разместить всю остальную электронику:

Лампа настраивается через веб-интерфейс и работает через бесплатный MQTT сервис, все подробности настройки - в видео выше.



Лампа кстати снабжена ИК датчиком, и её пара всегда показывает, есть ли кто рядом с лампой.
Вызов принят: железо танцует под музыку
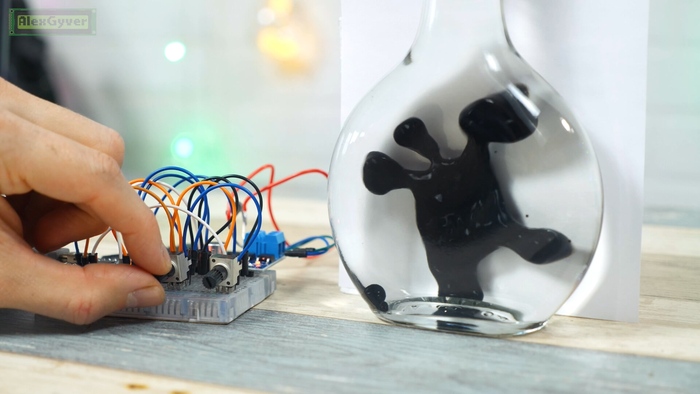
Как обычно, много раз присылали ролик/гифку с пляшущей кляксой, вроде даже здесь на Пикабу меня вызвали в коментах. Так что берём и делаем! Все подробности и результаты как обычно в видео выше.
В прошлом посте показывал как сделать ферромагнитную жидкость, но в итоге оптимизировал рецепт и получилось следующее:
В дополнение к прошлому посту понадобится:
- Блендер-кувшин с объёмом ~2 литра
- Металлическую мешалку нужно покрыть лаком (акриловым или для ногтей)
Химикаты те же самые, а сам рецепт такой:
- Добавить в кувшин 1 л воды при ~70 градусов
- Установить скорость, при которой блендер не создаёт пузыри
- Добавить 12 мл уксуса
- Добавить 30 г хлорного железа
- Добавить 18 г сернокислого железа
- Подождать пару минут до полного растворения порошка
- Быстро добавить 300 мл нашатырного спирта
- Выключить перемешивание, подождать выпадения осадка, слить воду до 700 мл
- В отдельную ёмкость налить 60 мл нашатырного спирта
- Добавить в нашатырный спирт 4 мл олеиновой кислоты при интенсивном помешивании, через иглу шприца
- Добавить в кувшин, разбавив водой
- Перемешивать около 10 минут
- Тонкой струйкой добавить 130 мл уксуса
- Должен резко выпасть осадок, в моём случае он поднялся и образовал густую пену
- Собрать пену ложкой в другую ёмкость
- 3 раза промыть спиртом, каждый раз отжимая осадок на магните
- Оставить сушиться под струёй тёплого воздуха, иногда помешивать
- Добавить 20-23 мл керосина
Получится более жидкая (менее плотная) жидкость. Её нужно поместить в тару:
- Обязательно стеклянная ёмкость
- Если новая из под коньяка - прополоскать нашатырным спиртом, а затем дистиллятом
- Если не новая - мыть мочалкой/ёршиком с мылом и нашатырным спиртом, затем прополоскать дистиллятом
- Наполнить раствором пищевой соли в дистилляте 30г на 100мл
Для реакции на музыку нужно будет собрать схемку:
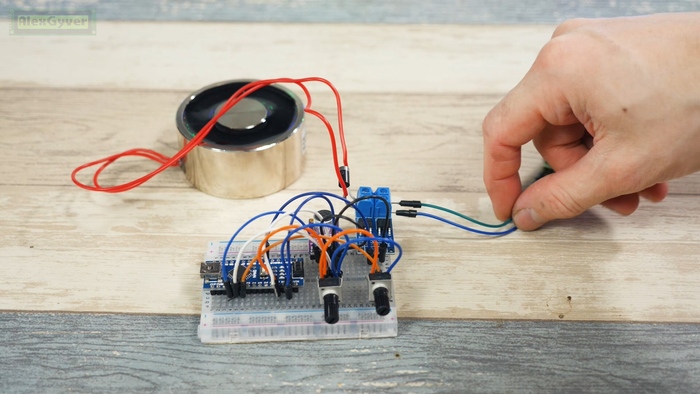
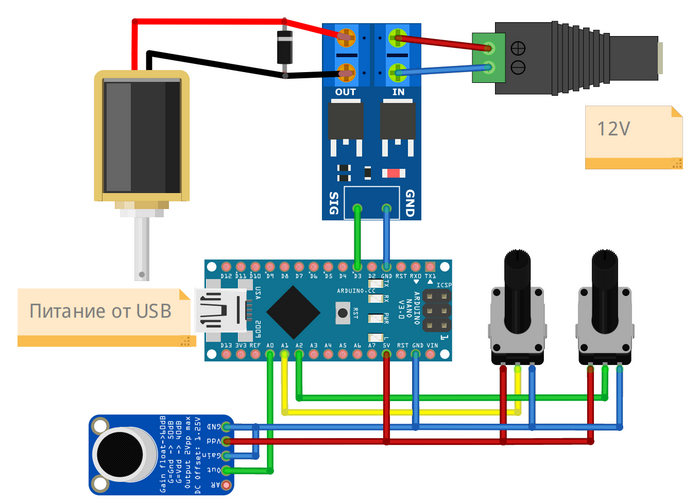
Инструкции, ссылки на компоненты и прошивка есть на странице проекта у меня на сайте. Одна крутилка отвечает за длину импульса на магнит, вторая - за его "мощность". Результат по скромным оценкам получился лучше, чем в оригинальном ролике.

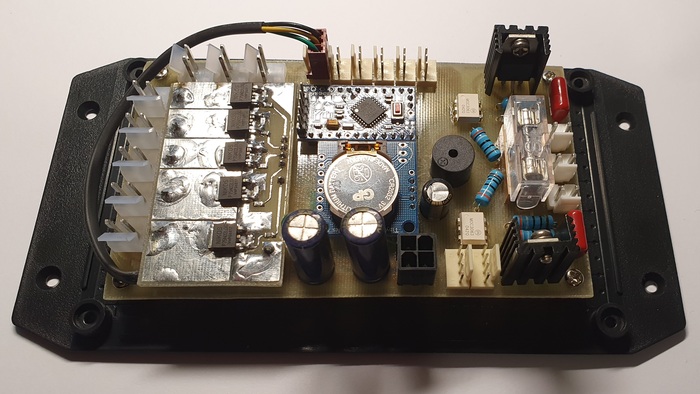
Идеи для контроллера гроубокса
Не так давно писал пост про контроллер для гроубокса.
Пришло время изготовить следующую версию. И нужны идеи. Уверен, что в сообществе много толковых электронщиков. Которые в том числе могут увлекаться выращиванием растений в контролируемой среде. Речь не про запрещенные(не стоит шутить с временем законом).

Возможно пост будет полезен тем, кто хочет свой контроллер с блэкджеком и шлюхами.
8 каналов управления постоянным током. 4 из которых управляется ШИМ. Планирую использовать драйвер вроде UCC37322 и какие нибудь мосфет с низким сопротивлением. Спасибо пикабушникам, которые вбили мне в голову необходимость использования драйверов. Для более быстрого открытия/закрытия транзистора. Особенно актуально при высокочастотном шим и мосфет с большой емкостью затвора.
2 канала управления переменным током.
В качестве мозгов atmega328. Управление энкодером плюс дисплей i2c 2004. Возможно выведу единственную кнопку reset.
5-6 разъемов для датчиков температуры ds18b20. 2 из которых будут нужны для отслеживания температуры на светодиодных бордах lm281. Последние будут запитаны через светодиодный драйвер в половину мощности, без радиаторов. На мой взгляд это самый лучший вариант в плане цена/эффективность. С ними вполне можно добиться 190 люменов на ватт при минимальном нагреве.
Так же хочется отслеживать температуру внутри корпуса и питательной жидкости.
3 разъема шины i2c. Для подключения дисплея и датчиков температуры/влажности. Так же по i2c будет подключена DS3231 в качестве часов реального времени. И датчик тока/напряжения ina260 на входе.
Пару аналоговых разъемов для подключения датчиков уровня или/и датчика протечки.
4 канала постоянного тока 12 вольт с шим:
-планки красных(660нм) светодиодов для досветки на стадии цветения. Хочу использовать высокоэффективные lh351h. Ватт 40, 12 вольт.
-вентилятор вытяжной вентиляции, 30-50 ватт, 12 вольт.
-вентилятор обдува, 120мм которые для охлаждения корпуса ПК.
-приточный вентилятор, скорее всего такой же, 120 мм, 12 вольт.
4 канала постоянного тока 12 вольт без шим:
-ультразвуковой увлажнитель, который в сборе на 24 вольта. Предполагаю работу этого канала через повышающий dc-dc на xl6009.
-1 или 2 насоса 12 вольт для аэропоники. Это когда корни опрыскиваются питательным раствором через какой то период времени.
2 канала управления переменным током 220 вольт(симисторы bta16):
-драйвер(а) светодиодов основного освещения.
-возможно подключить что нибудь еще, например инфракрасную лампу для обогрева в зимнее время(если надо).
Логика работы достаточно простая. Можно настроить время включения света и время выключения. Включить досветку красным и настроить процент мощности. Задать период для работы насосов аэропоники. Задать температуру и влажность, которую будут стараться поддерживать вентиляторы вытяжной/приточный и ультразвуковой испаритель. Задать мощность вентиляторов обдува. Защиты вроде тех, что отключат свет при перегреве светодиодных бордов или протечке жидкости и т.д.
В общем, здесь еще есть над чем подумать. Если есть какие то мысли, предлагаю высказывать. Хочется получить полностью автономное устройство, которое не страшно оставить на неделю.
В качестве ИП хочу использовать блок питания от ПК и светодиодный драйвера для питания основного освещения.
И вот мы подходим к сути. Хочется реализовать автономную работу насосов от резервного источника питания. Так как при отсутствии напряжения в сети, растения проживут совсем недолго. Планирую использовать сборки АКб 3s, для получения 12.6 вольт на выходе.
Есть две идеи. Мосфет (закрытый при наличии напряжения на выходе блока питания) который в случае аварии, будет открыт. При этом все остальные нагрузки будут выключены (все вентиляторы, увлажнитель и досветка красным). Реализовать достаточно просто. На входе питания atmega328 поставить диод, а после емкости, которые позволят проработать достаточно для открытия мосфет.
И второй вариант, это полностью независимая система на attiny88. С атмегой они будут взаимодействовать только для установки периода запуска насосов. Если пропадает основное питание, то основной контроллер перестает выполнять свою функцию. А attiny88 так же включает мосфет и получает питания от резервных АКБ.
Это первый опыт реализации частичного резервного питания. И честно говоря, не знаю как лучше. Мне кажется первый вариант. Но если у вас есть готовые схемы и предложения готов выслушать. Ну и вообще, подкиньте идей. В этот раз будут заводские платы и есть возможность реализовать практически любой функционал в рамках своих возможностей и необходимости. Хочется на выходе получить готовое устройство на гроубокса. Уже пообещали подарить семян острых перчиков.
Как лучше всего реализовать резервное питание и чего не хватает контроллеру? Сейчас в процессе разработки принципиальной схемы. Хочу в ближайший месяц заказать недостающие детали и платы. А так же подумать и изготовить корпус и систему аэропоники.
Если вы делали что то подобное, поделитесь информацией. А если хотите сделать сами, может эта информация будет полезна. Может кто знает, где заказать недорого драйвера 80-120 вольт 0.7 ампер. Или около того. Может в Китае есть варианты? Я не нашел. Только дорогие Mean Well и наши Неон.
p.s. Это по прежнему хобби. Если кого то заденет мой непрофессиональный говор, извините.
Читайте также: