
Как сделать игрушечную машину на пульте управления
Обновлено: 27.04.2024
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками.
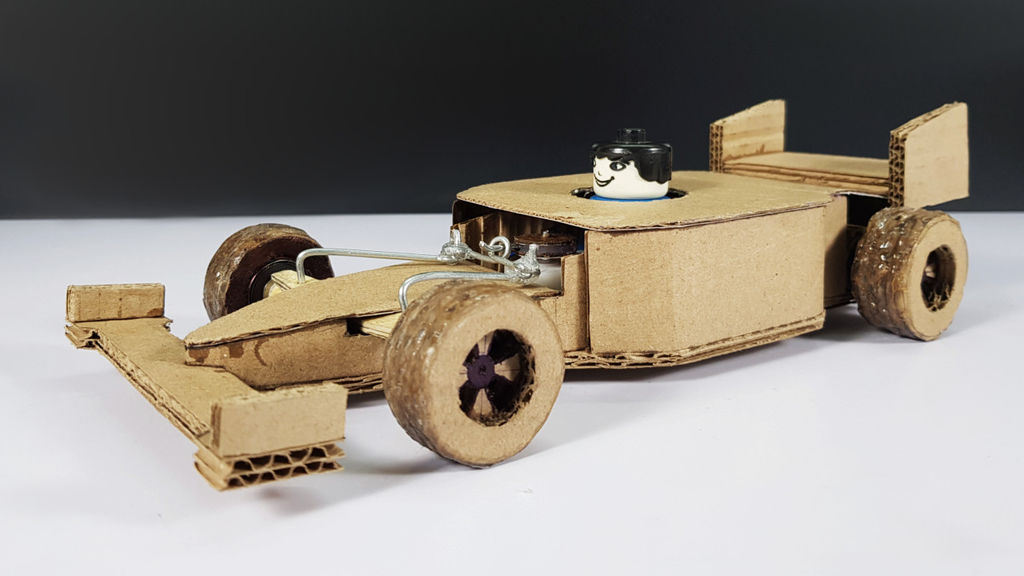
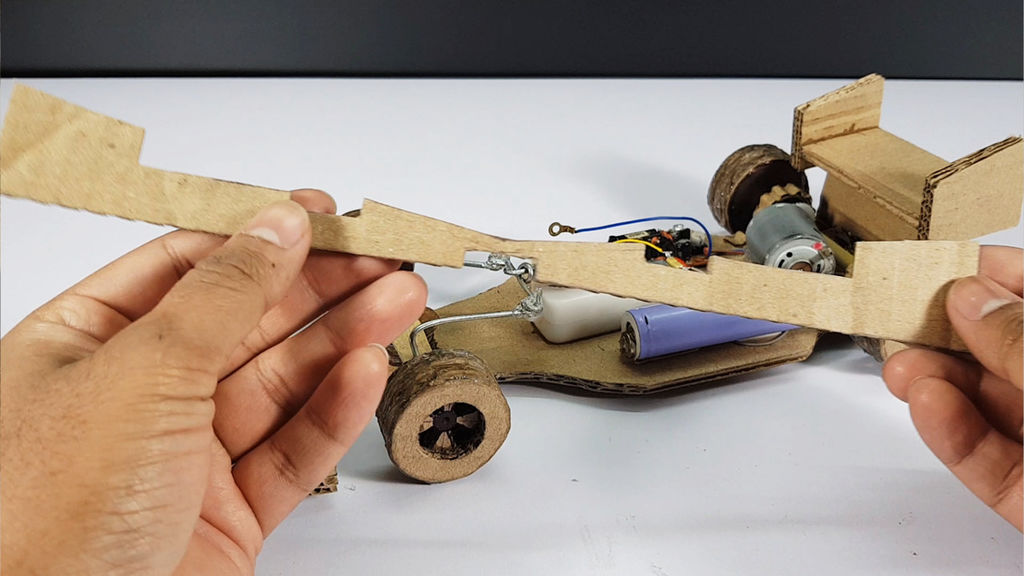
В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома.
Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн.
Шаг 1: Смотрим видео
Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок.
Шаг 2: Детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
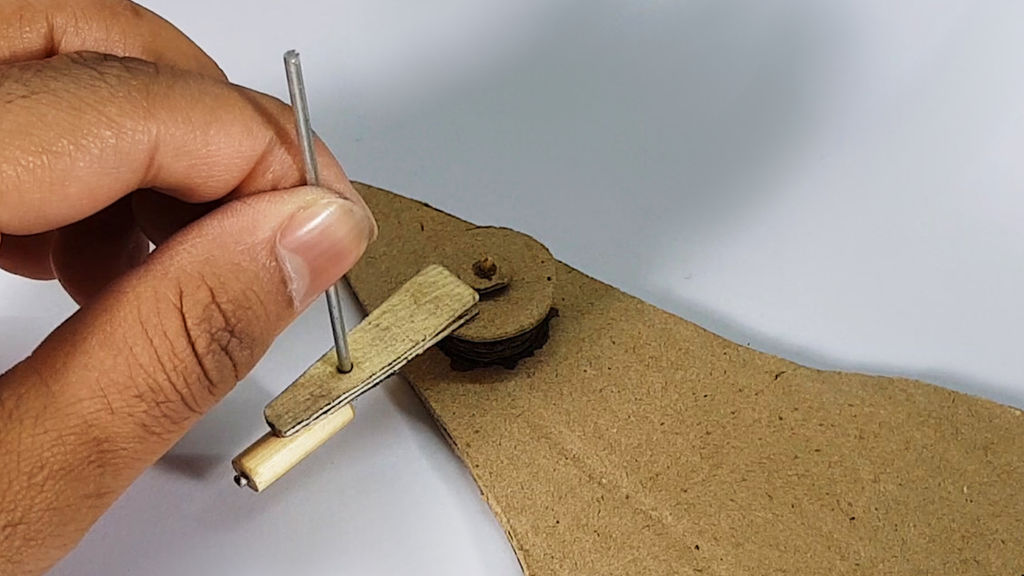
Шаг 3: Изготавливаем основу и заднюю ось
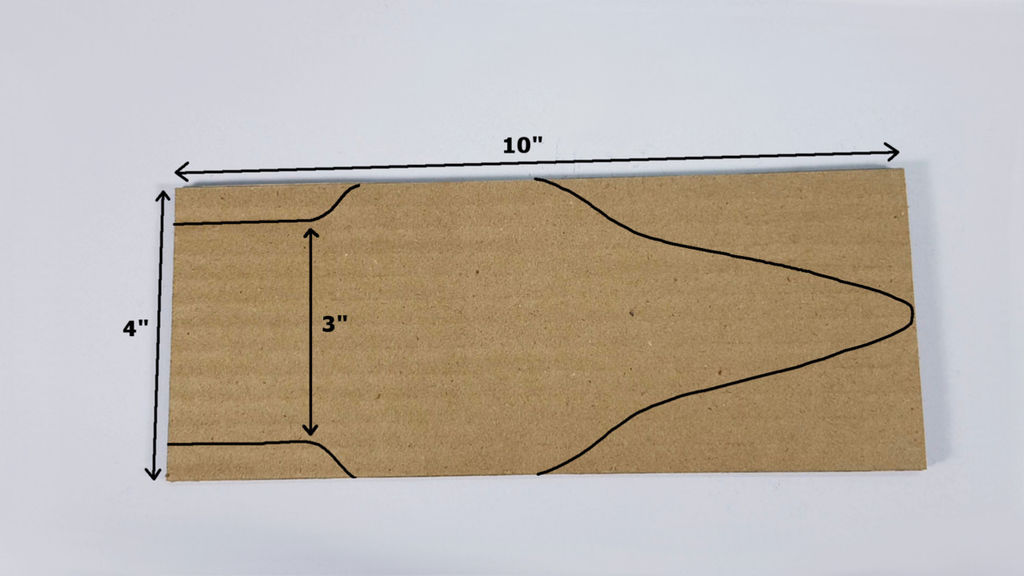


- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
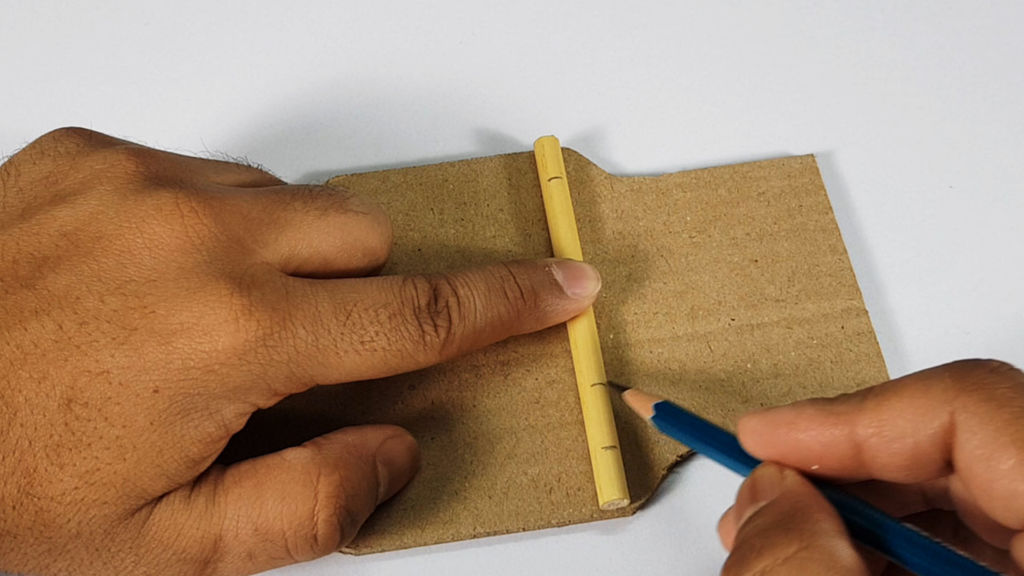
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
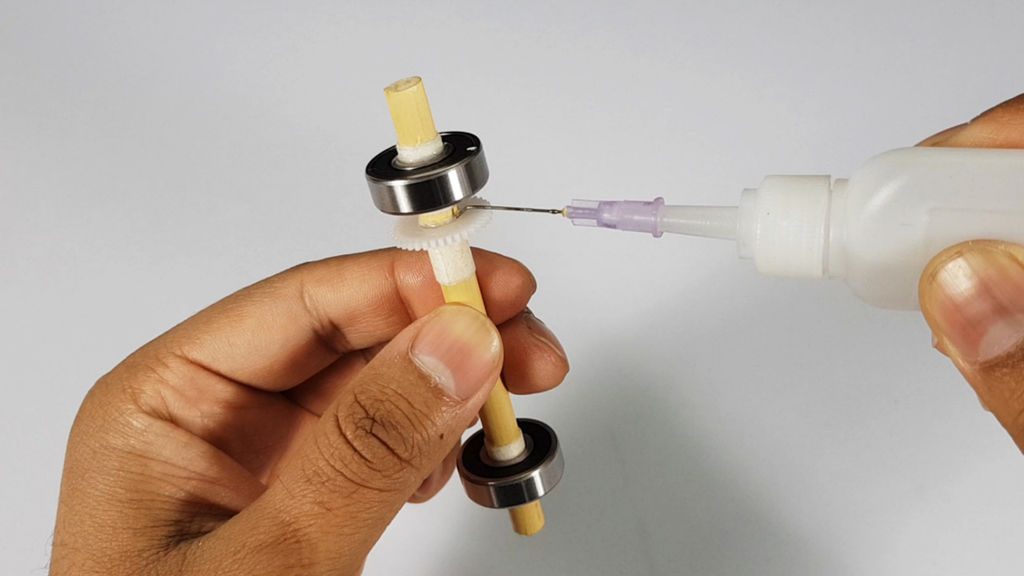
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
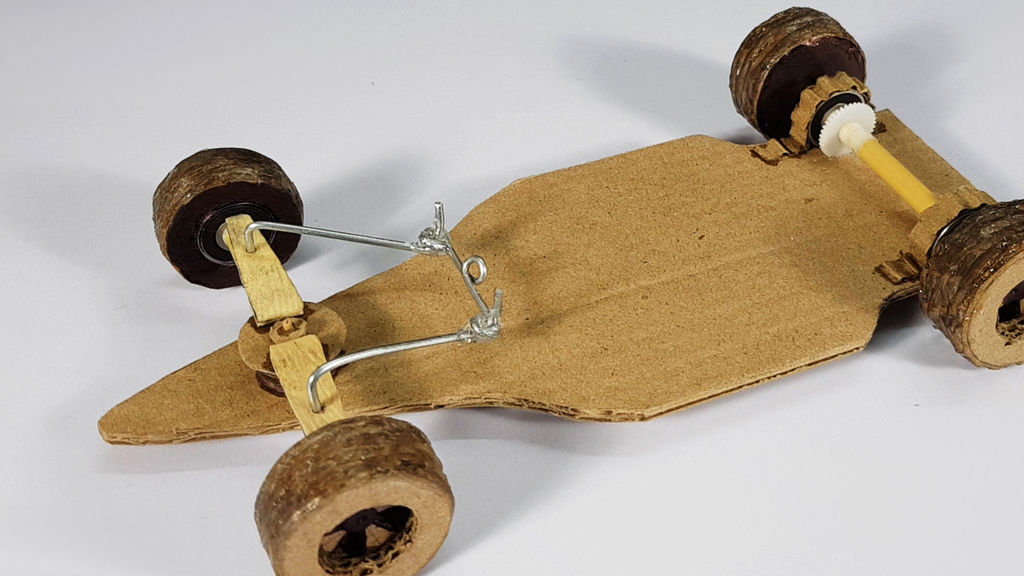
Шаг 4: Изготавливаем самодельный рулевой механизм
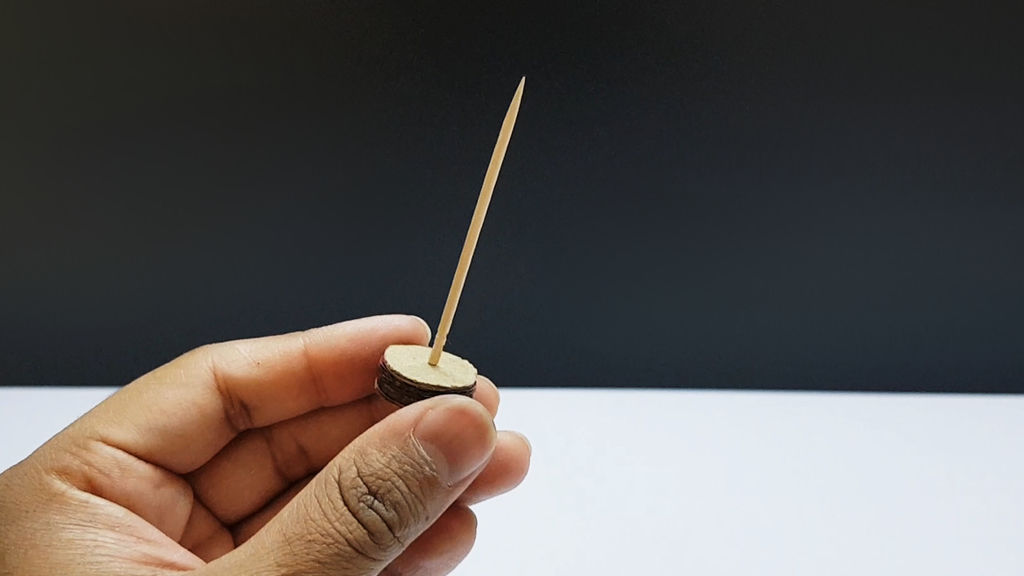
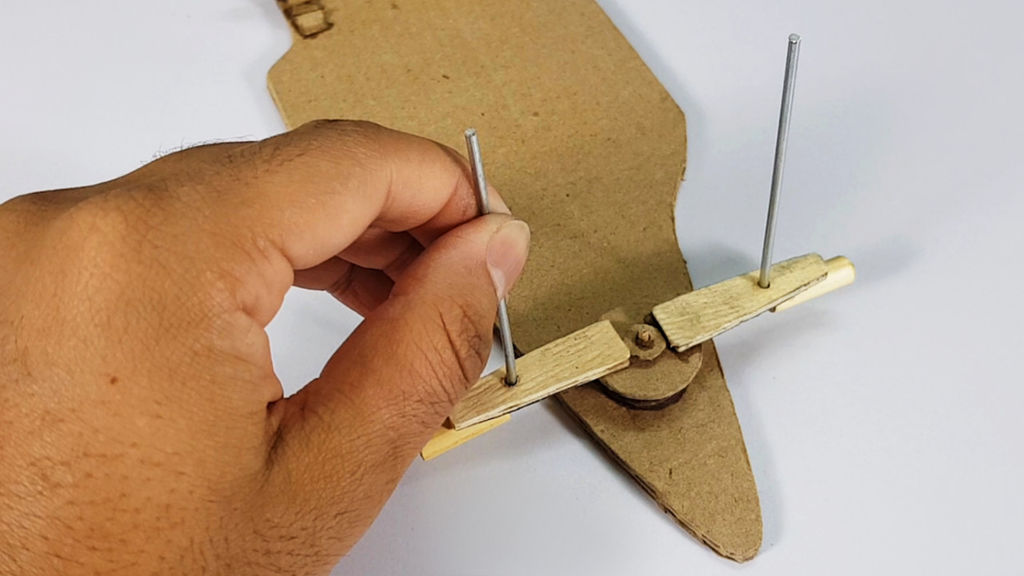
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
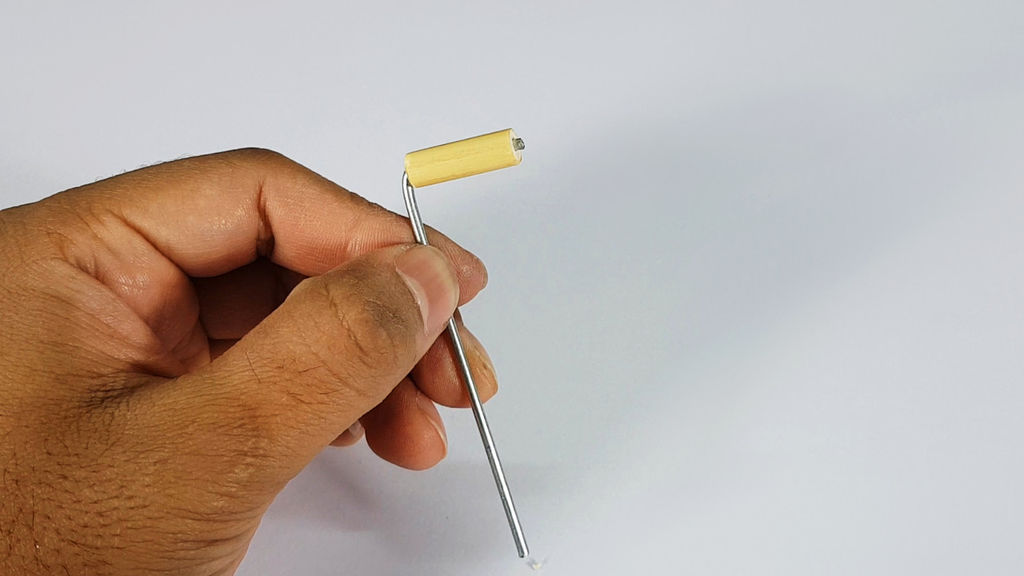
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
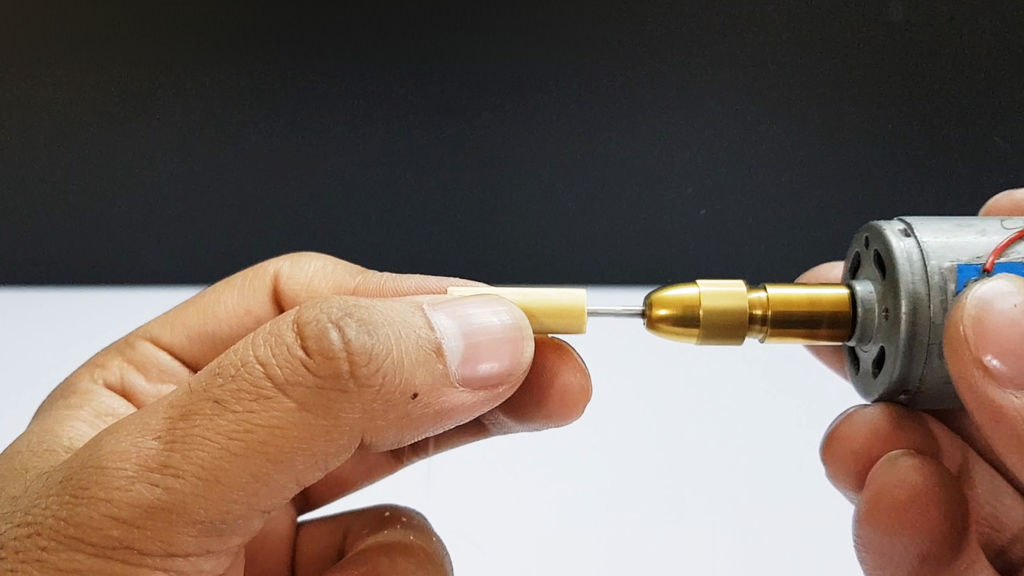
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
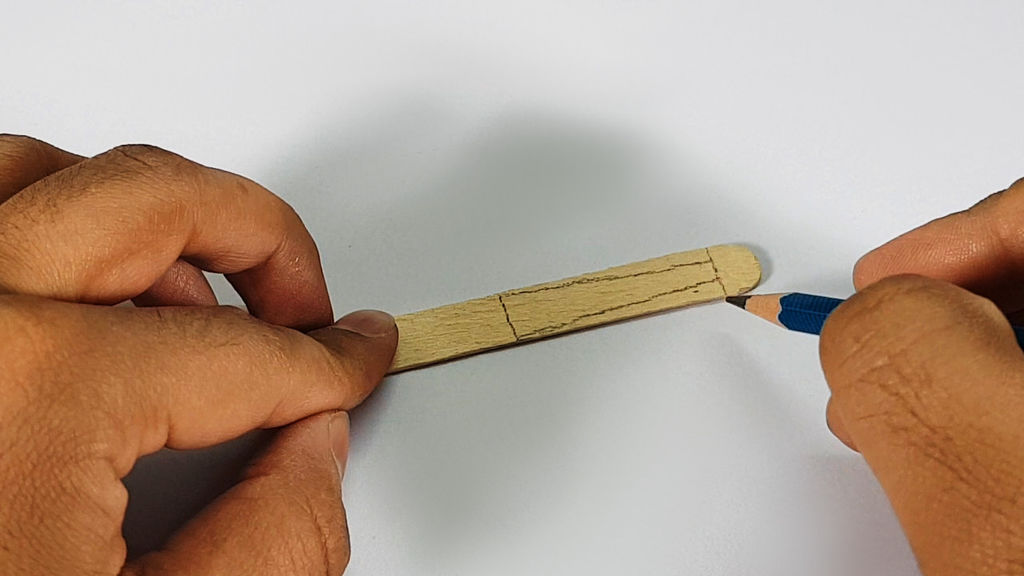
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
Шаг 5: Изготавливаем картонные колёса
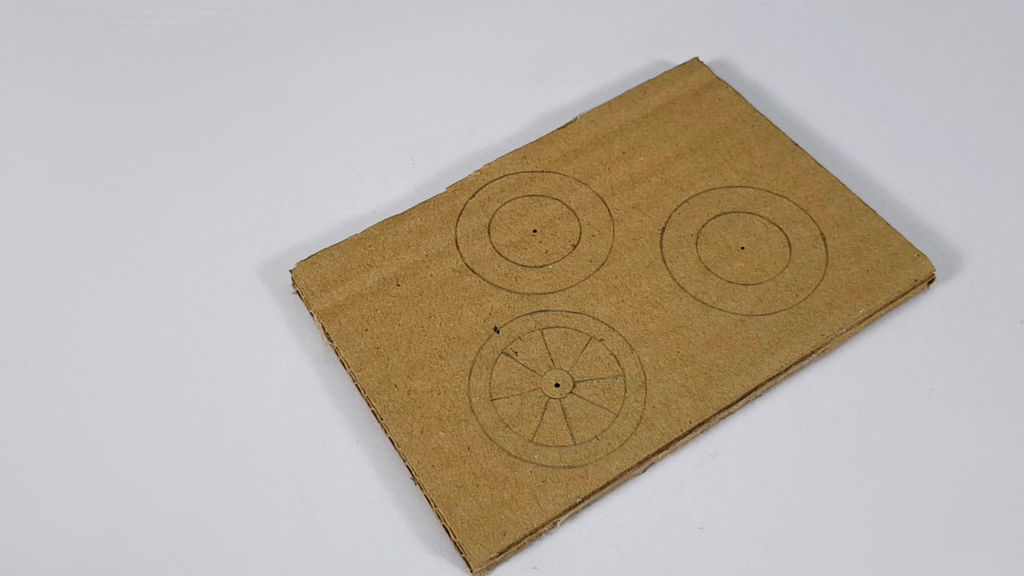




- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: Создаём электроуправление
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
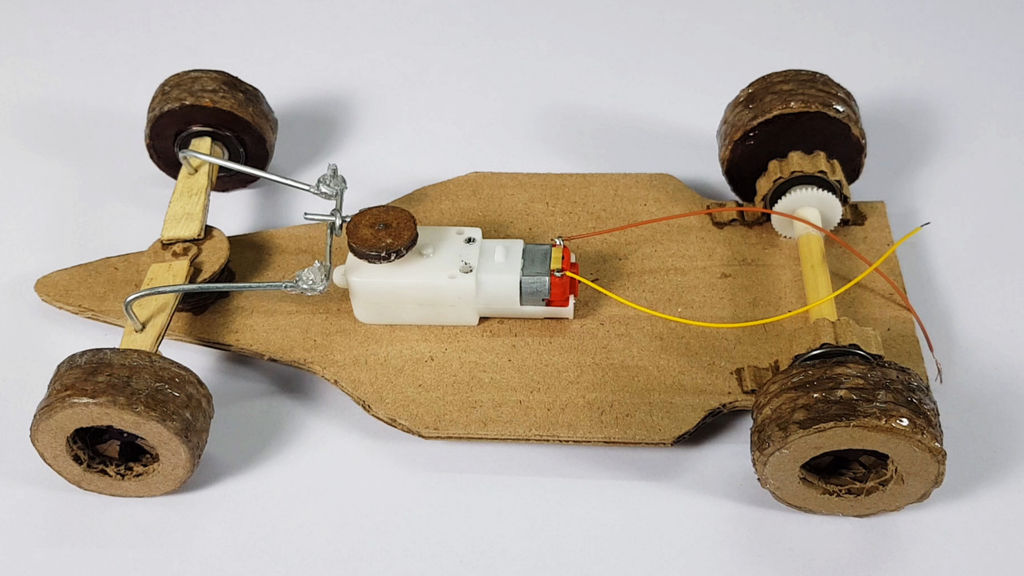
Шаг 7: Соединяем компоненты
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
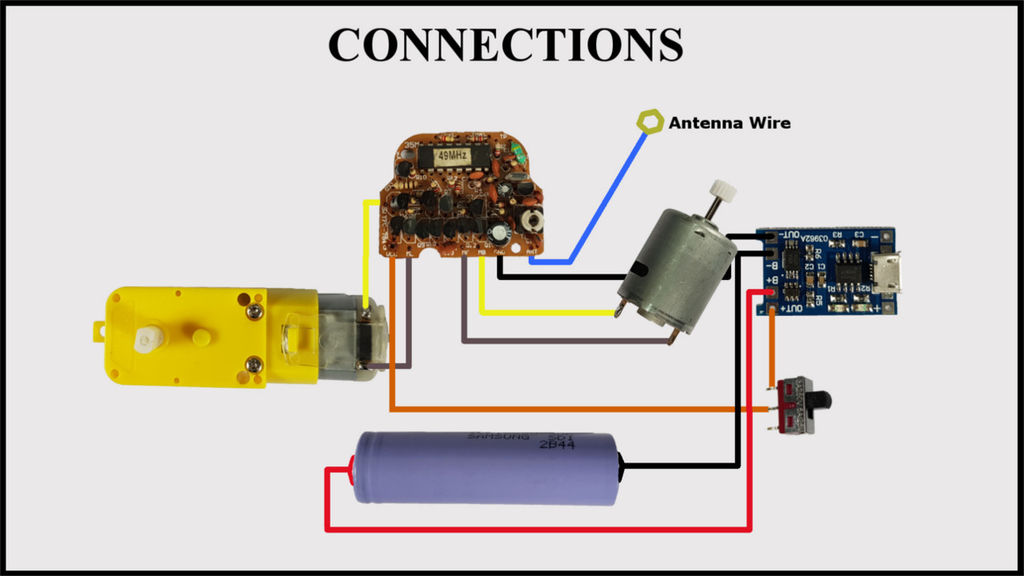
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
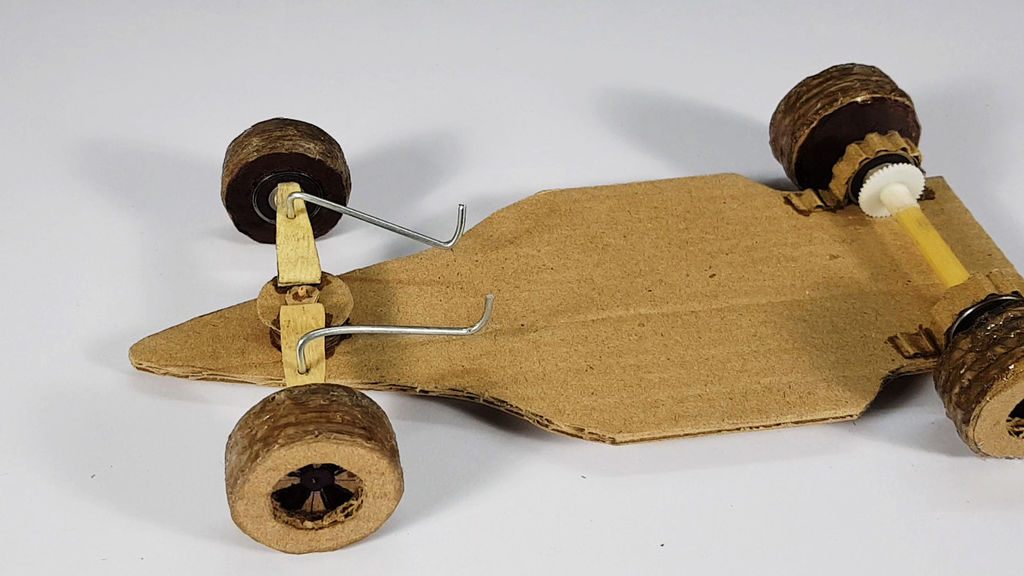
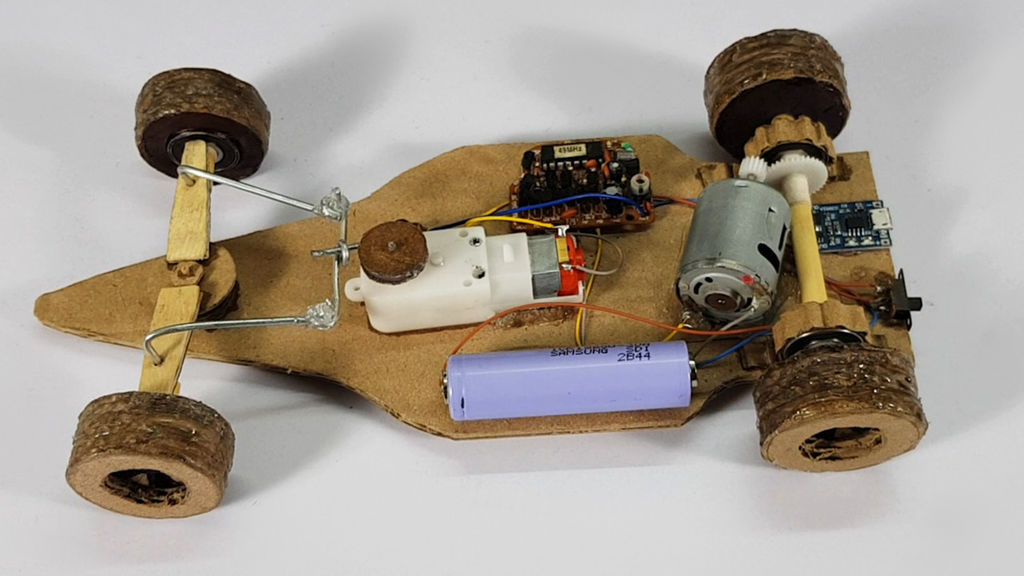
Шаг 8: Создаём элементы кузова



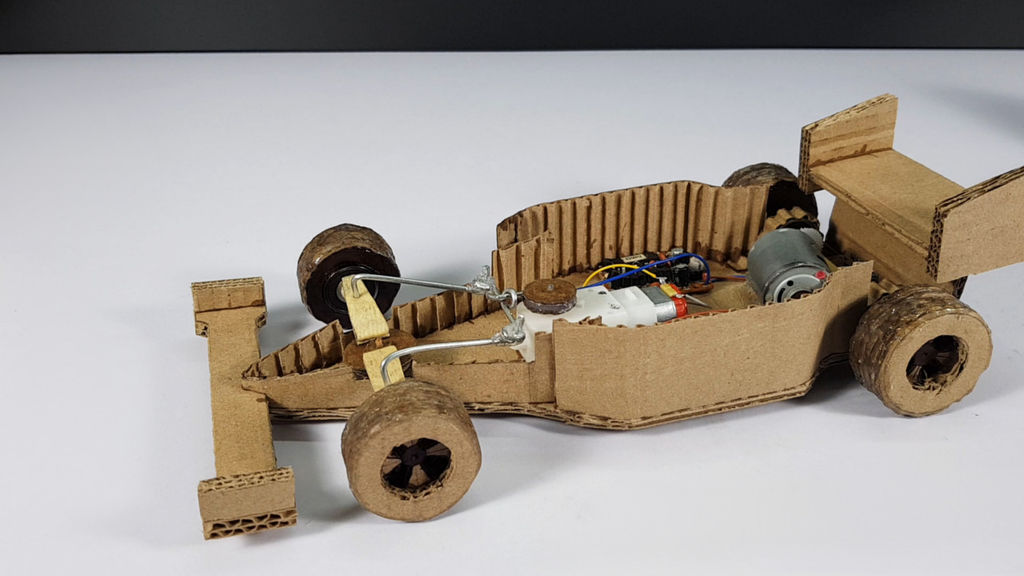
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
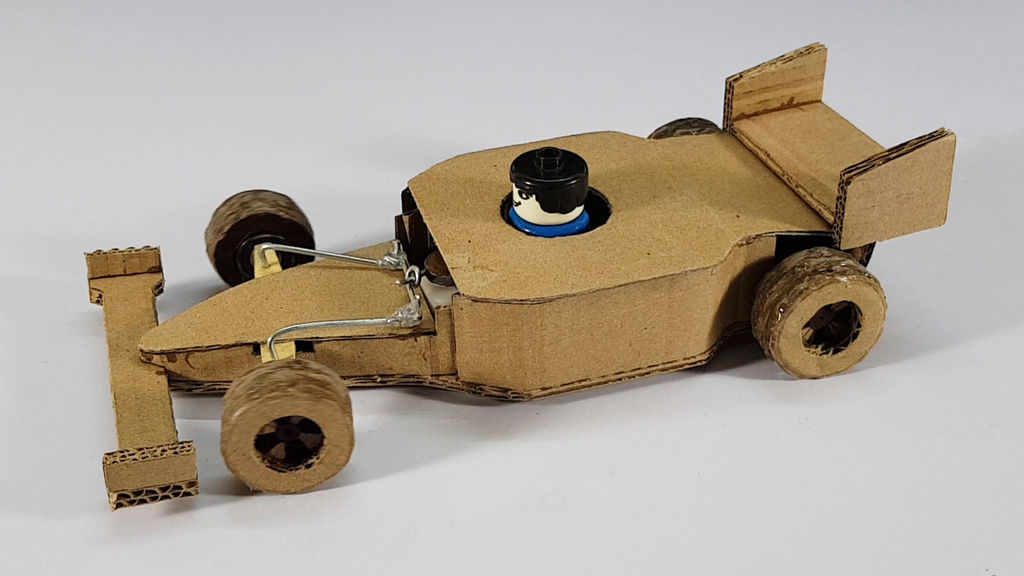
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
- Для изготовления кузова, ссылайтесь на приложенные картинки.
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.
Шаг 9: Дополнительно
Дополнительно можно озвучить голосом предстартовый отсчет 3-2-1-Старт и использовать его для старта гонки.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
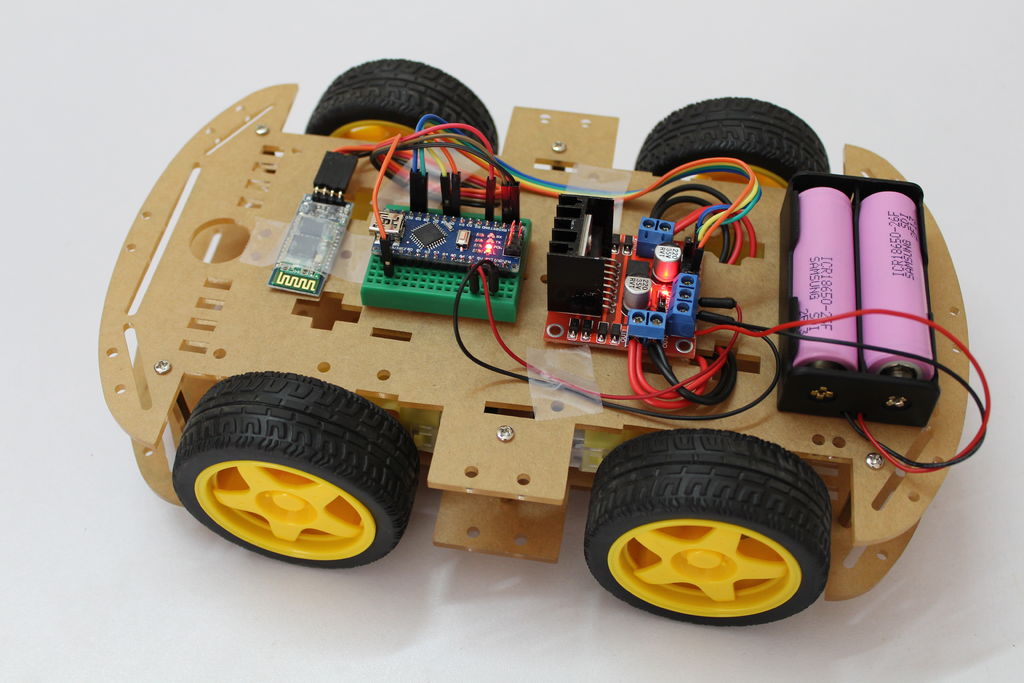
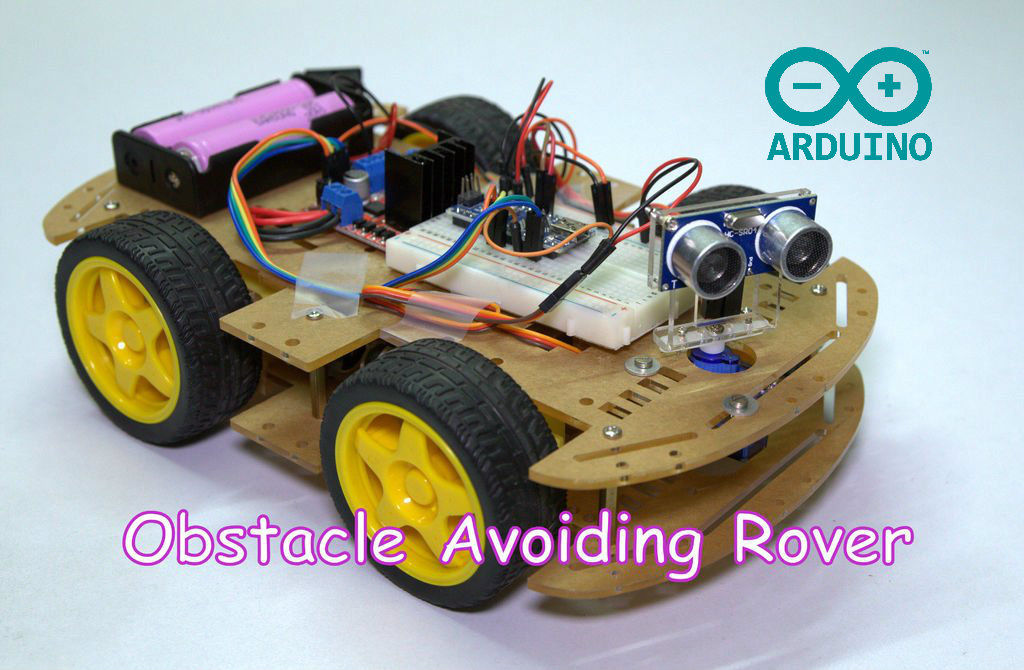
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.
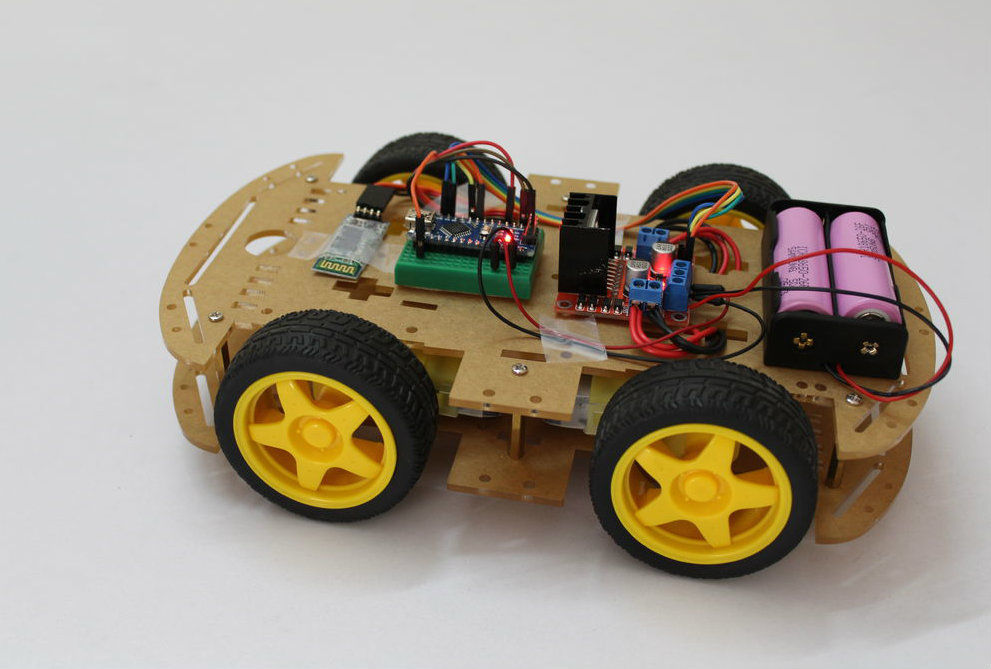

По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
Шаг 1: Нужные части и инструмент
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
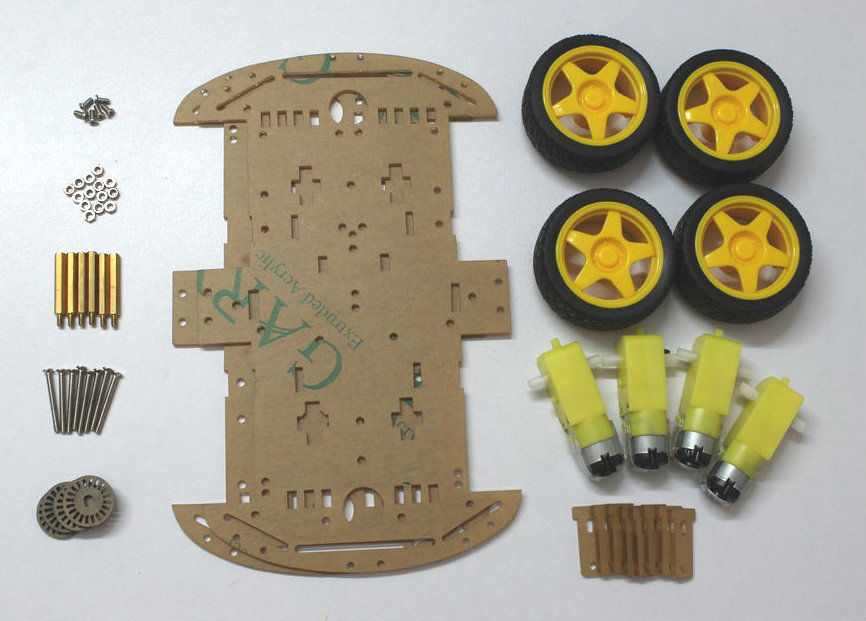
- Набор шасси 4WD для робота (GearBest)
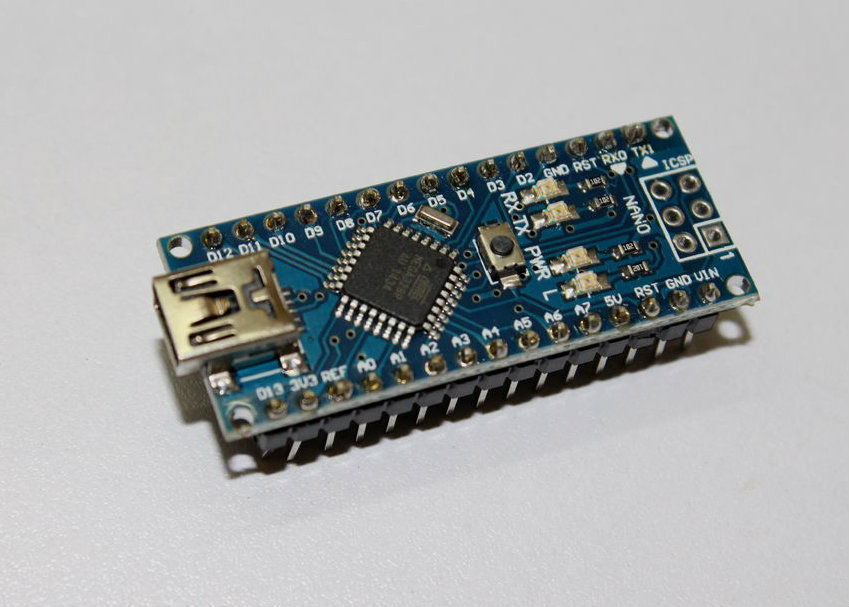
- Arduino Nano (GearBest)
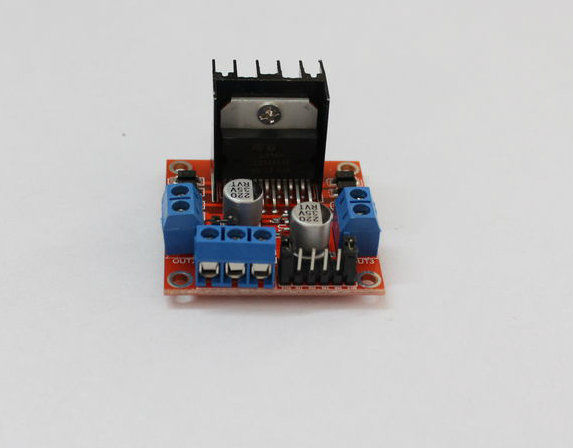
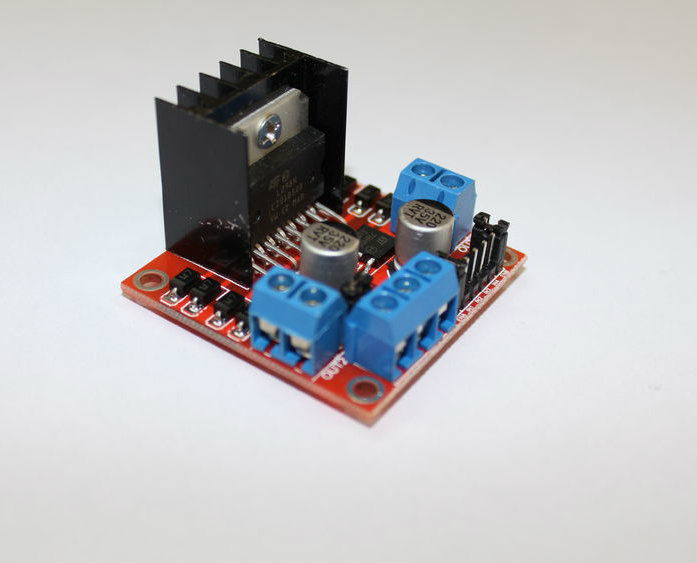
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси



Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы
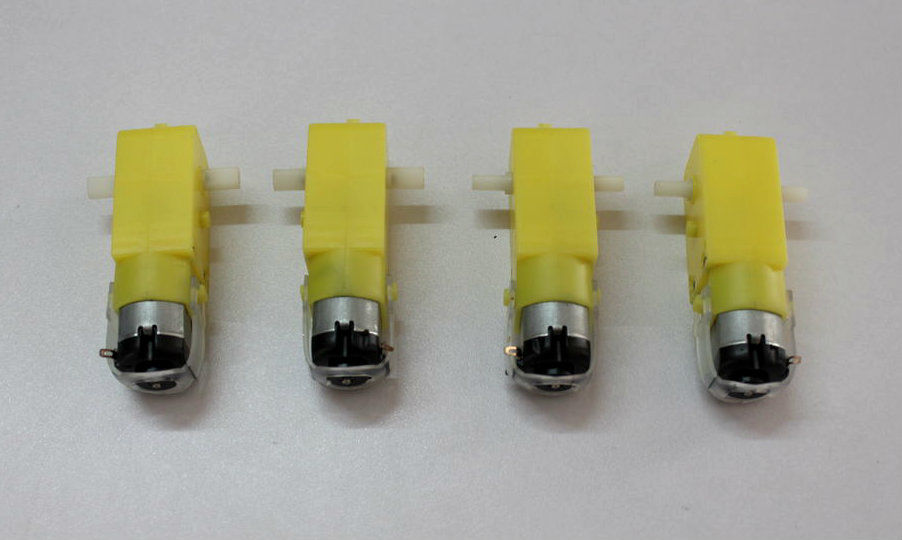

Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н•м).
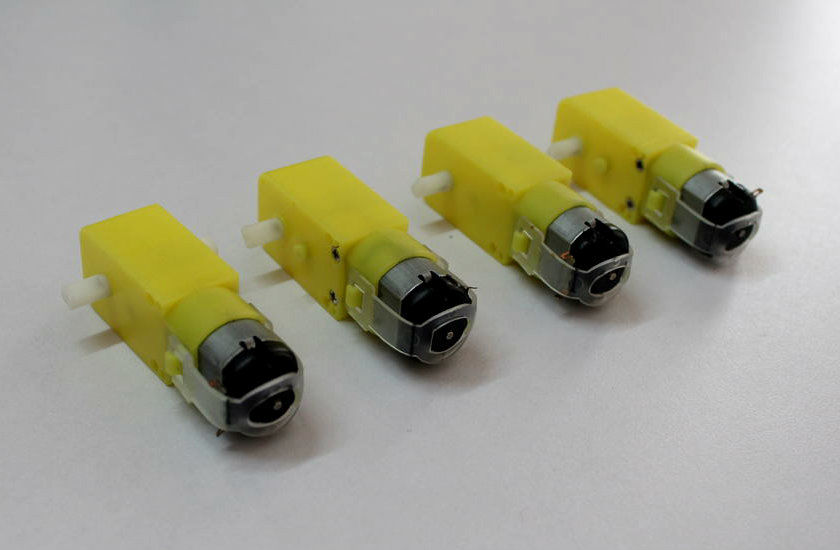
Шаг 5: Подготавливаем клеммы моторчиков
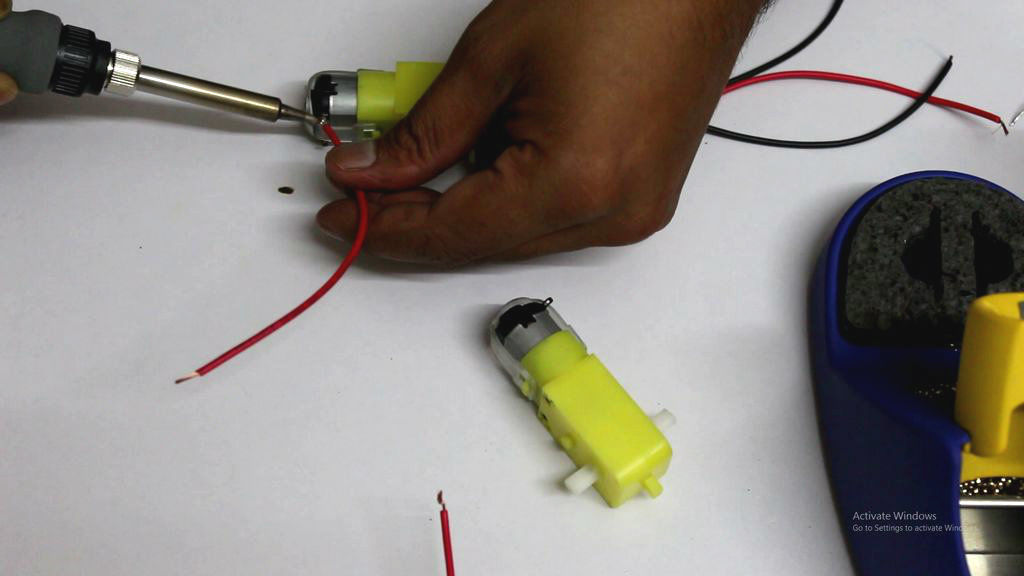

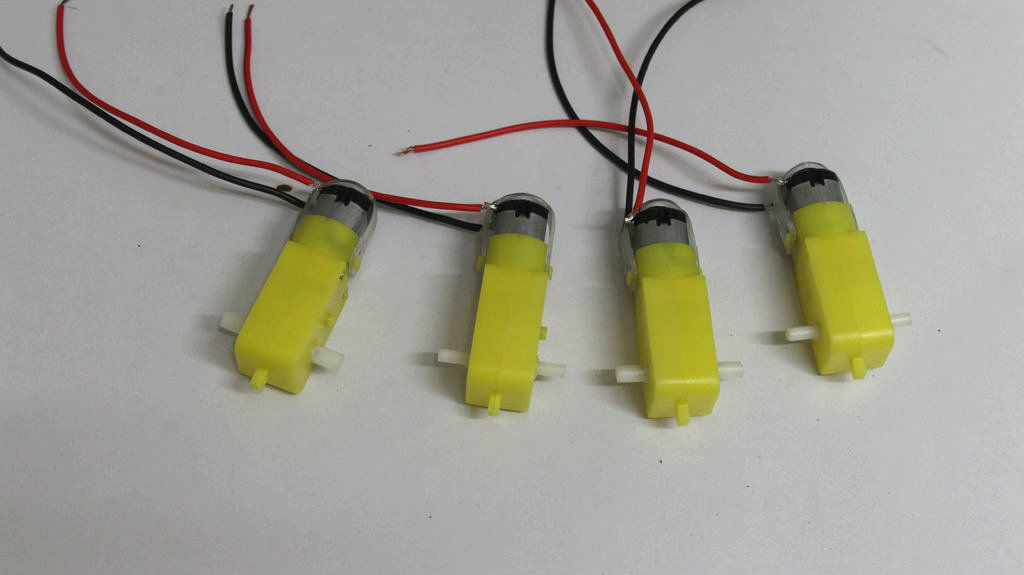
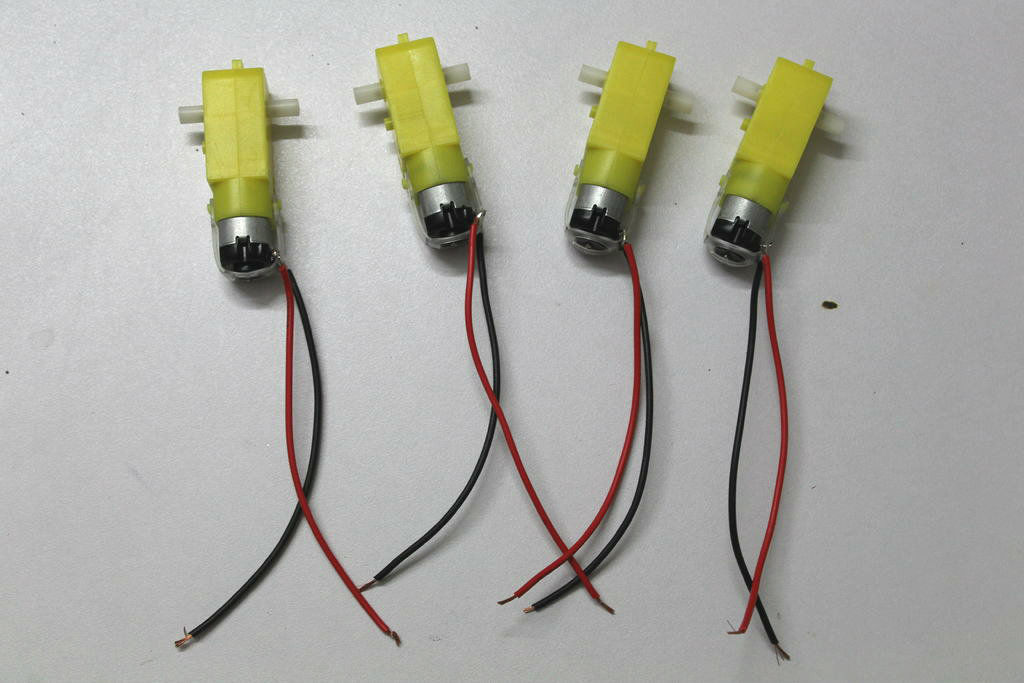
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
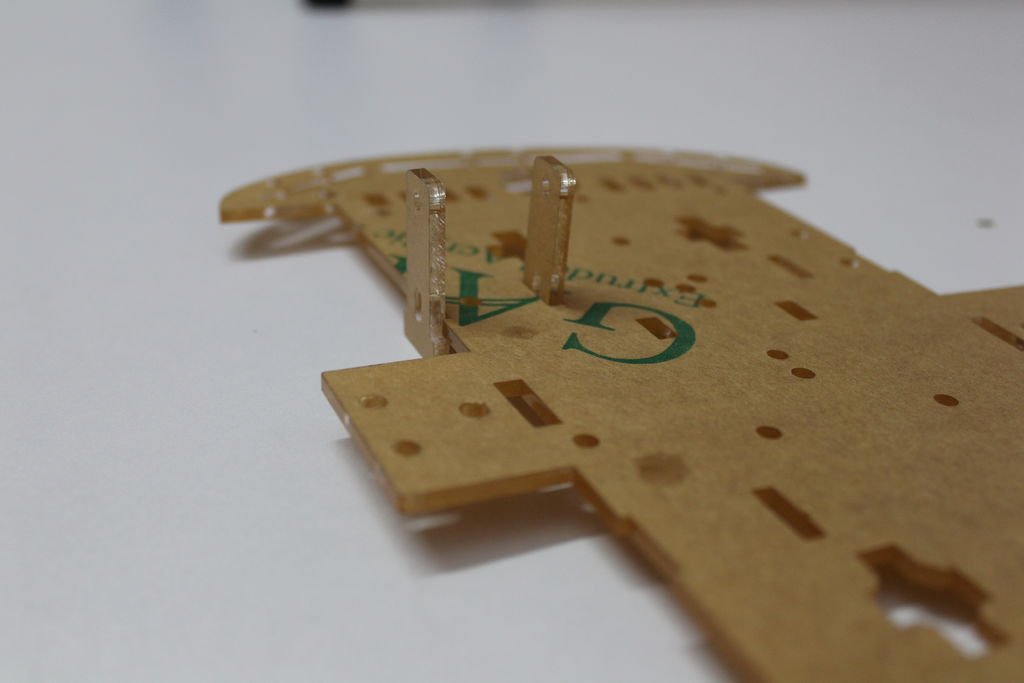
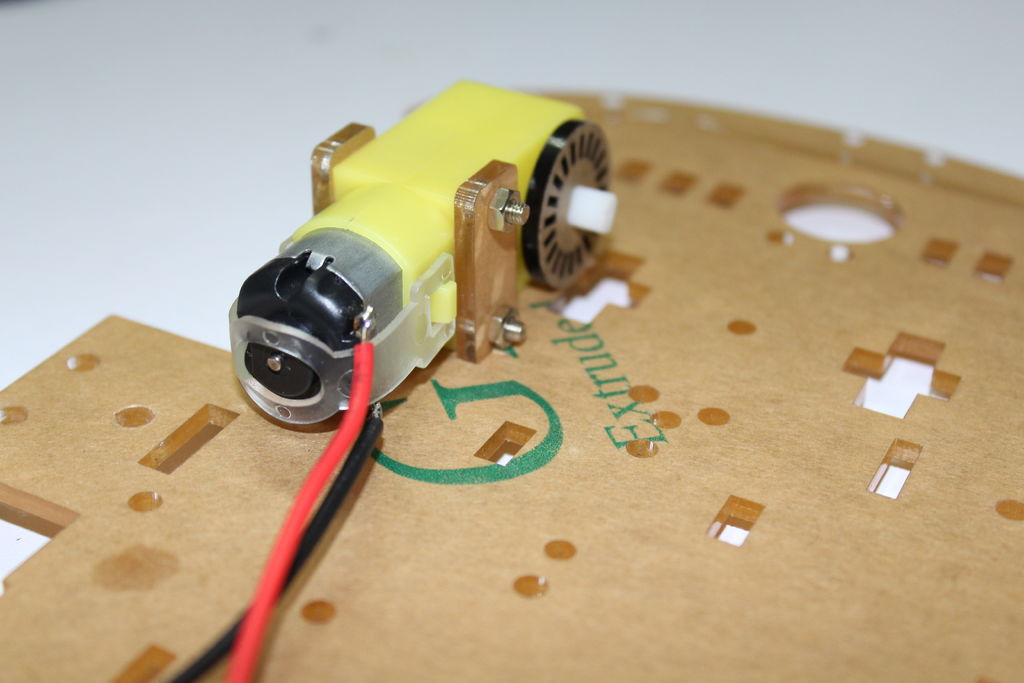
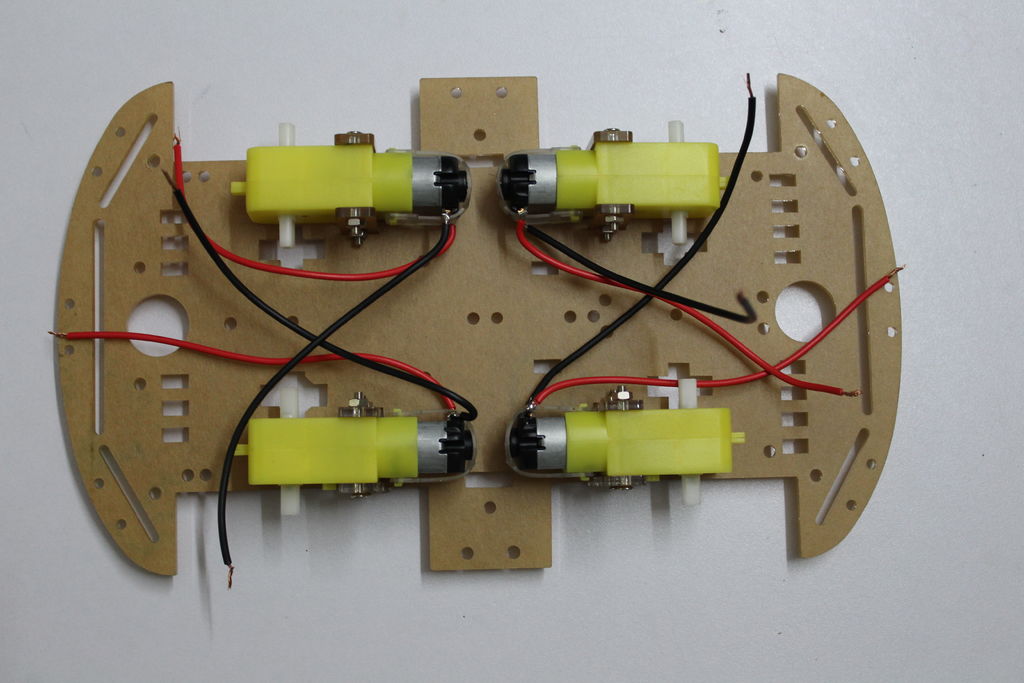
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
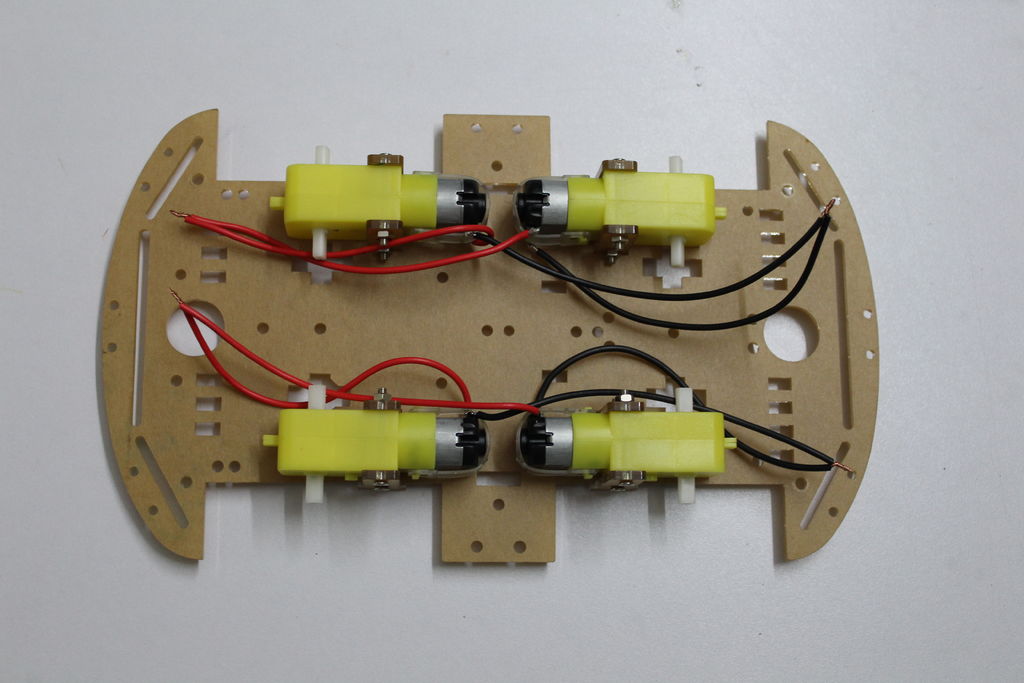
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
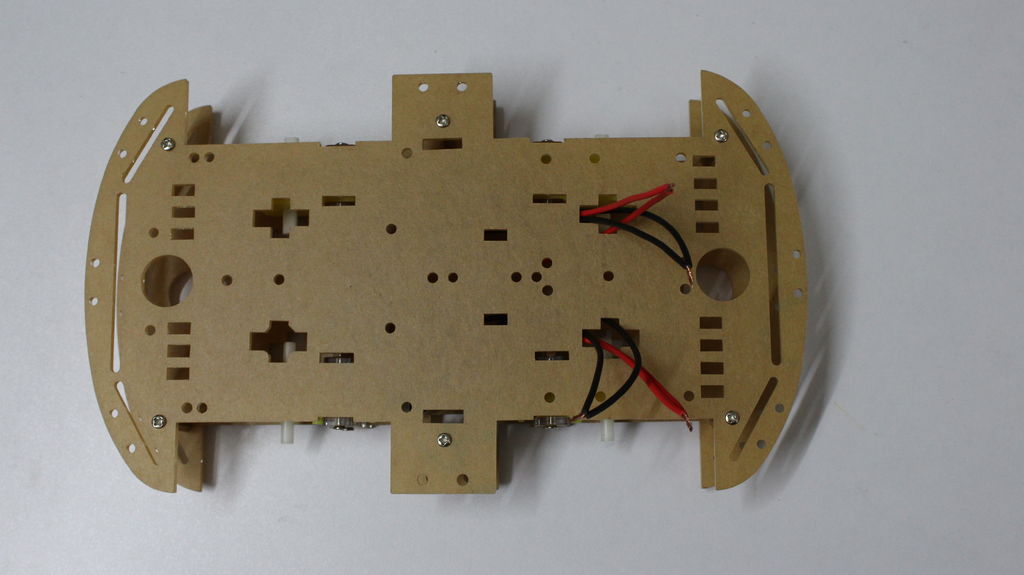
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
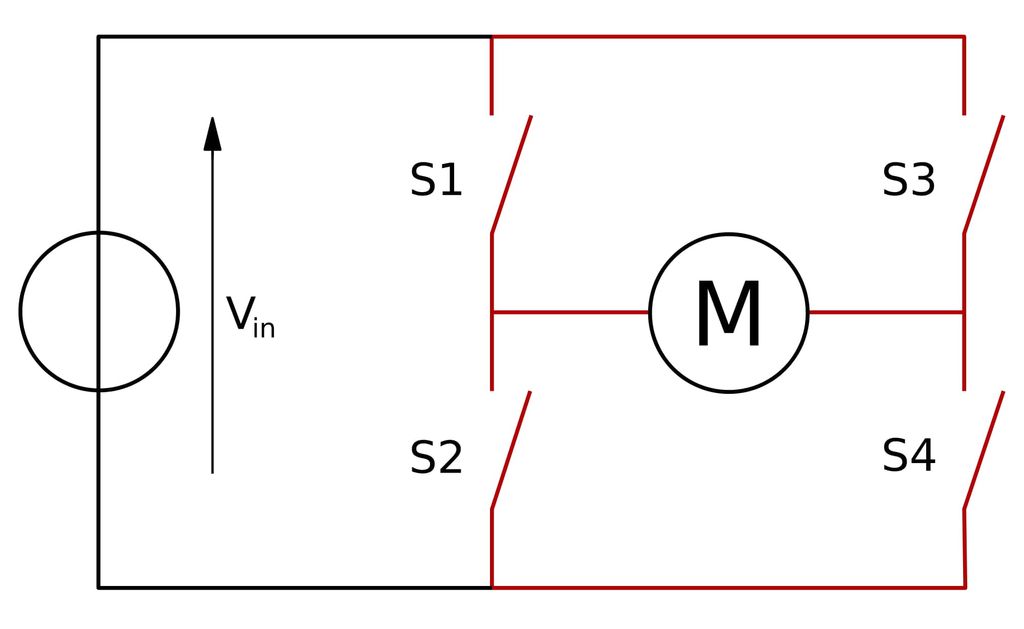
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
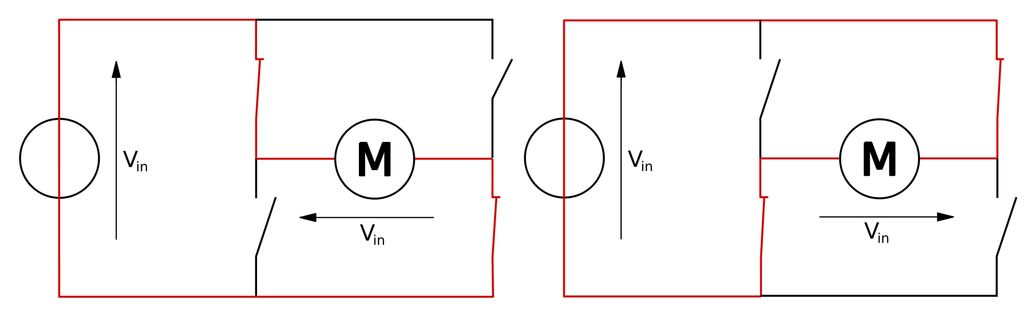
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
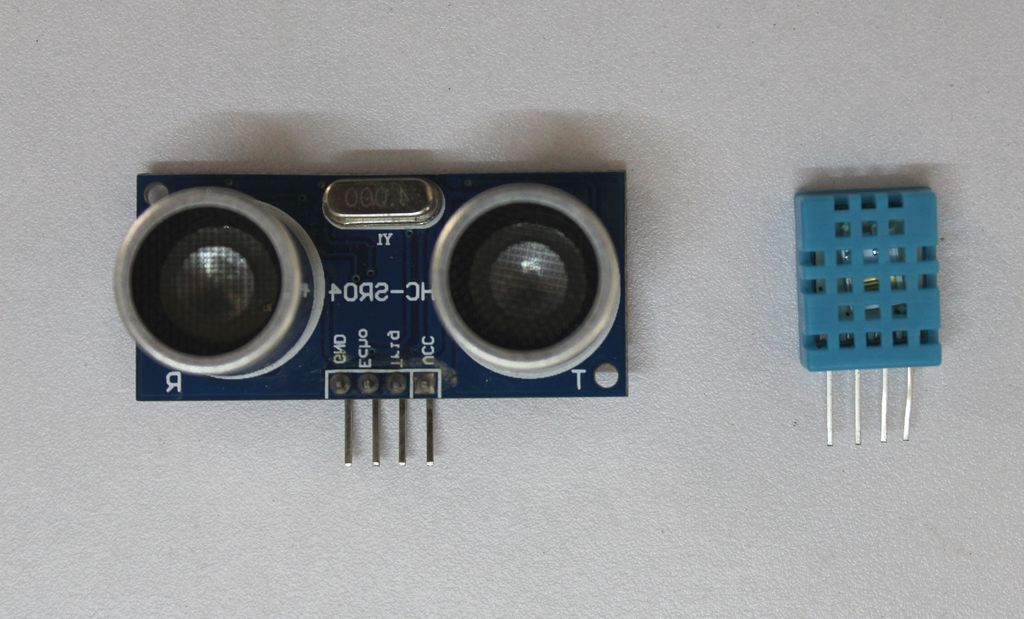
В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Шаг 11: Источник питания







Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
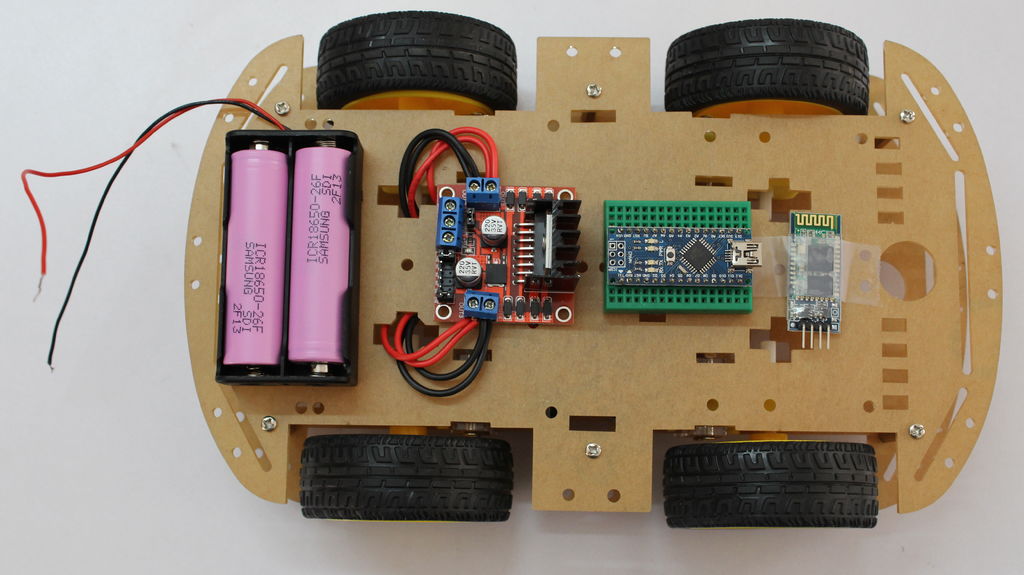
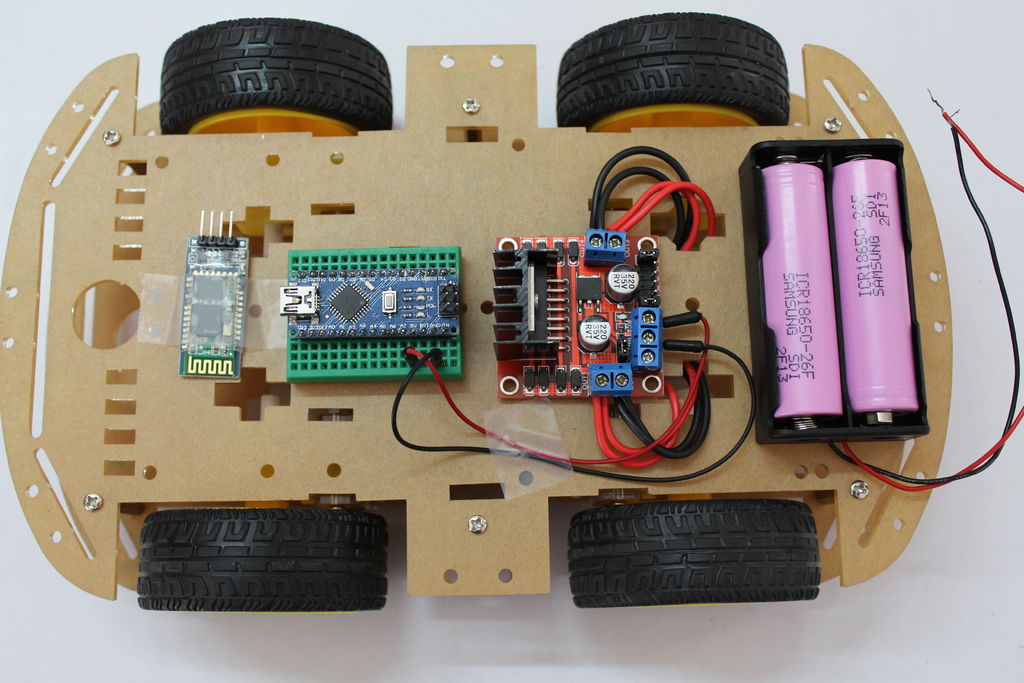
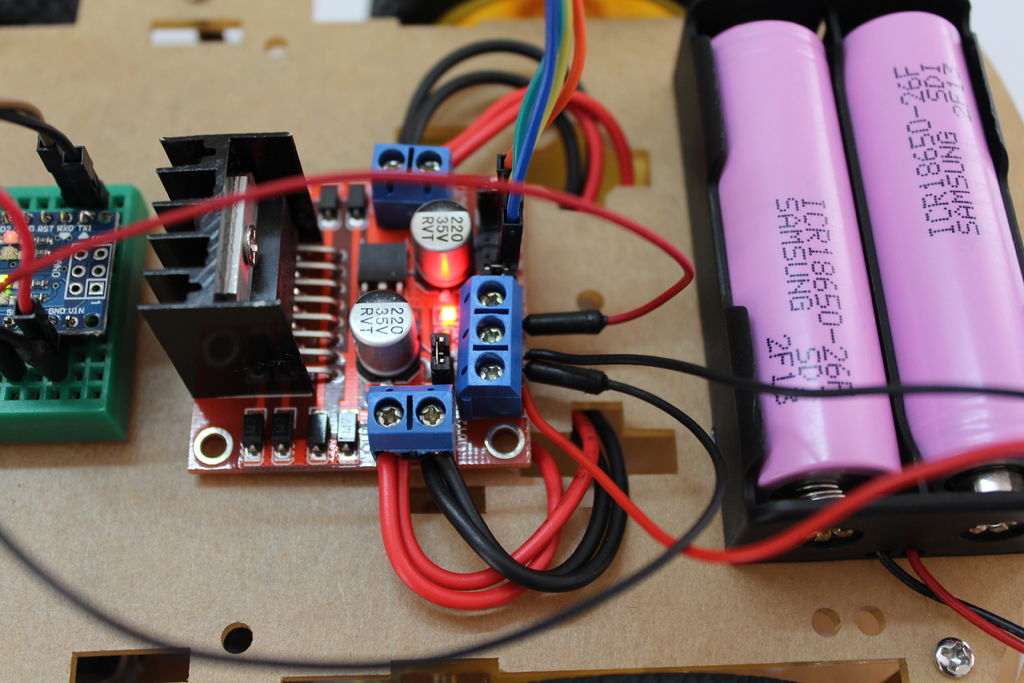
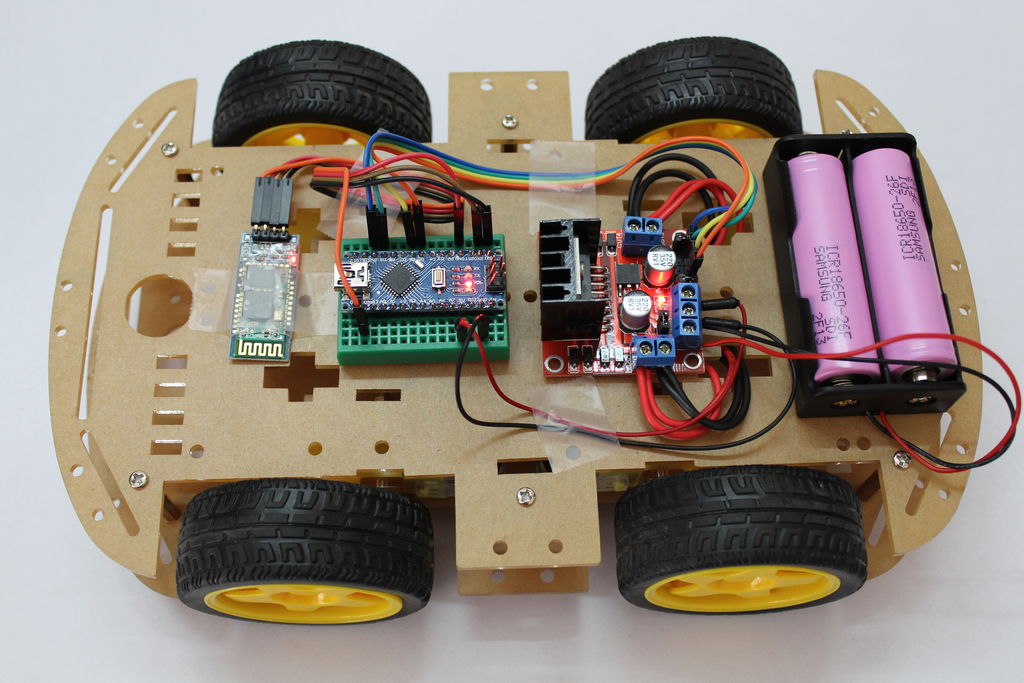
Шаг 12: Установка компонентов
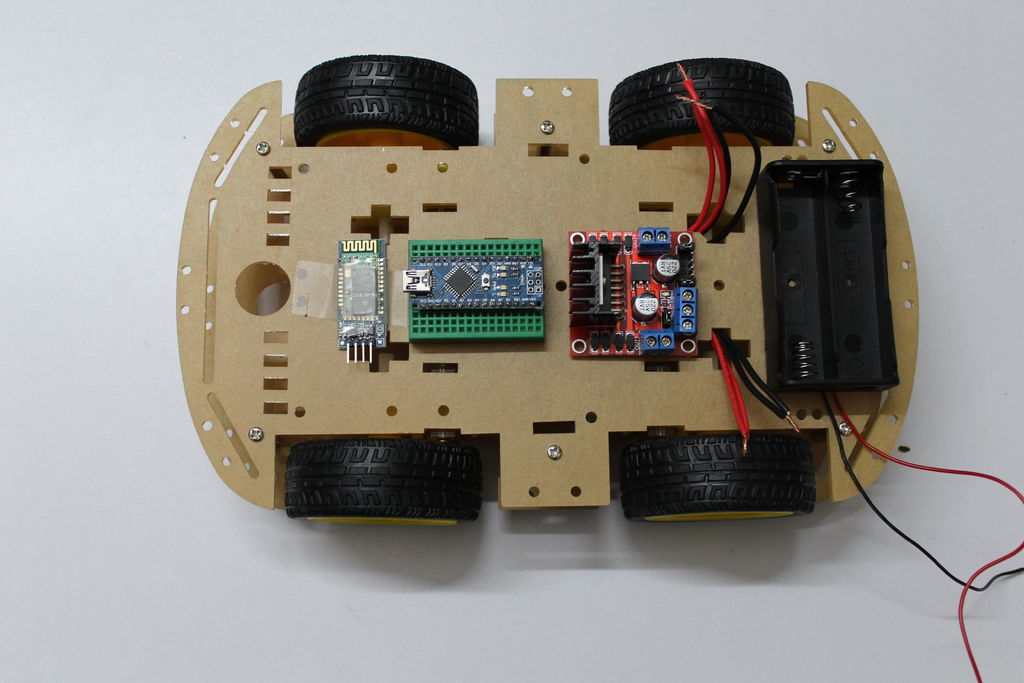
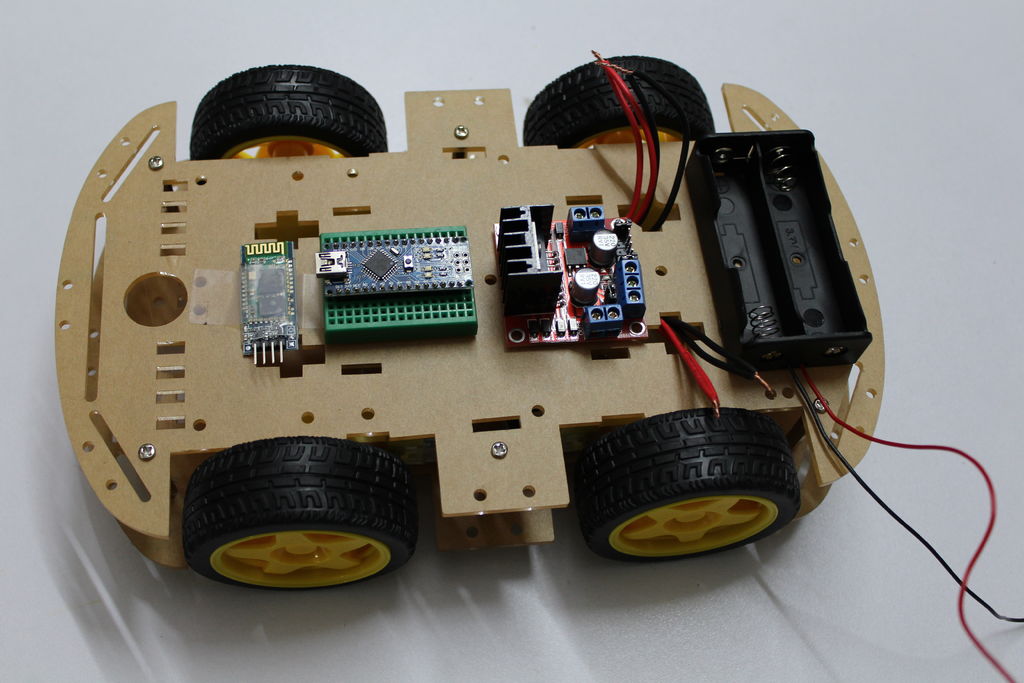
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
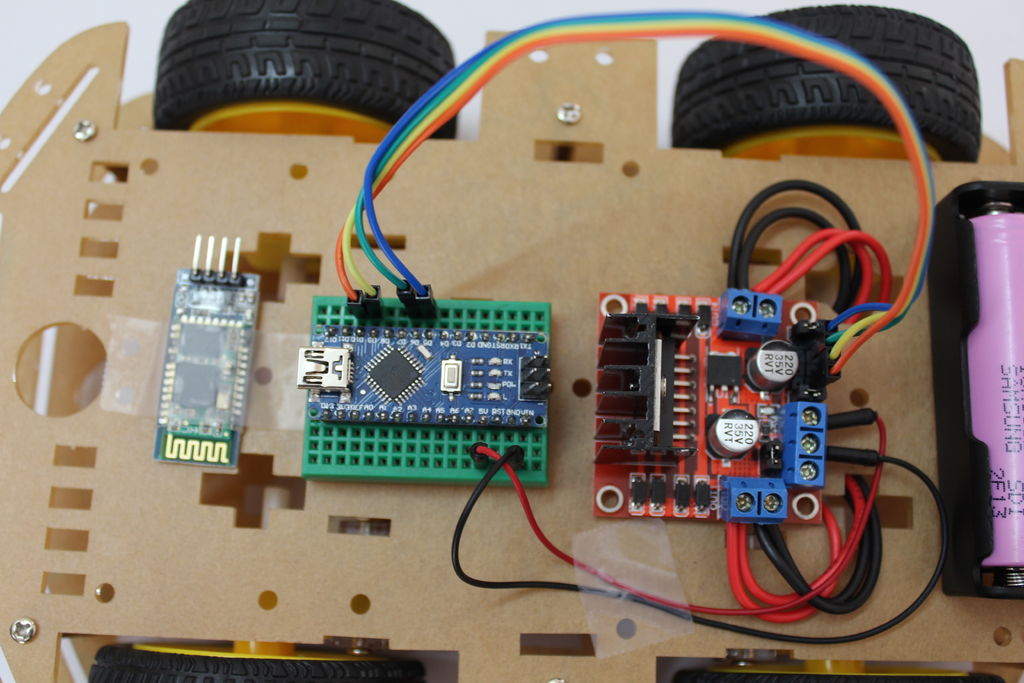
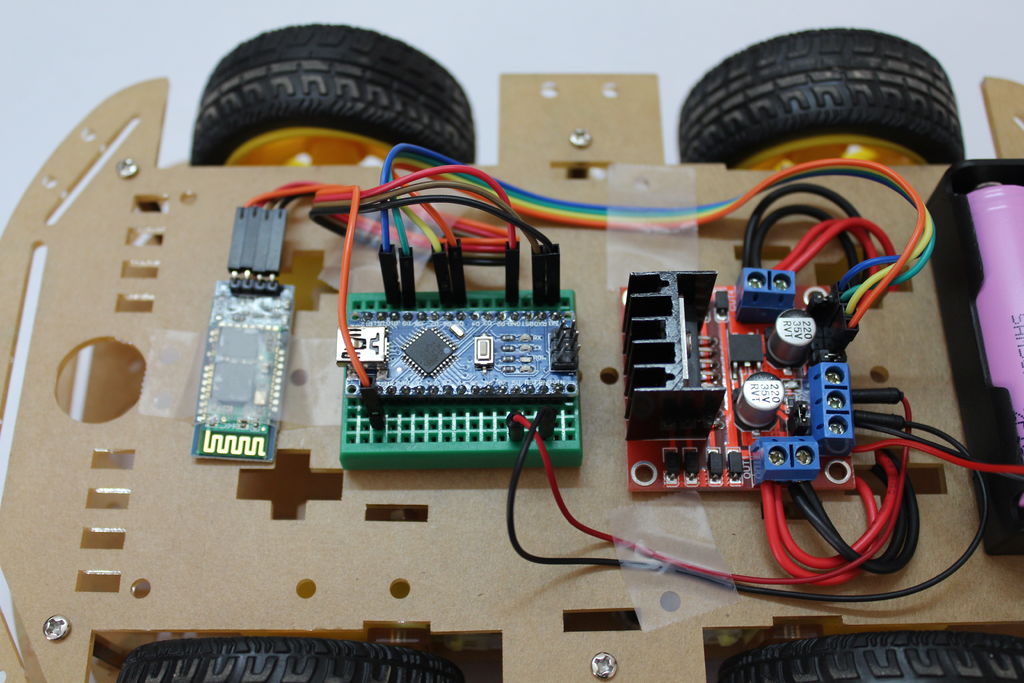
Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Out1 -> красный провод левостороннего мотора (+ )
Out2 -> черный провод левостороннего мотора ( — )
Out3 -> красный провод правостороннего мотора ( + )
Out4 -> черный провод правостороннего мотора ( — )
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления
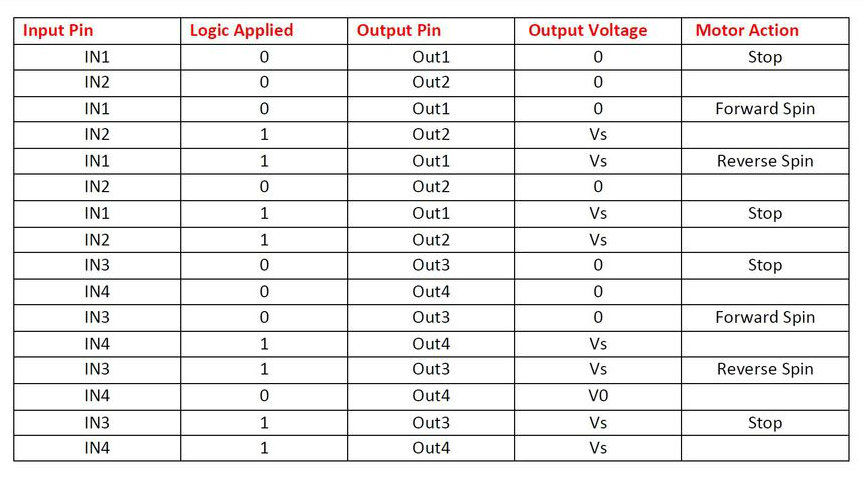
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 15: Софт
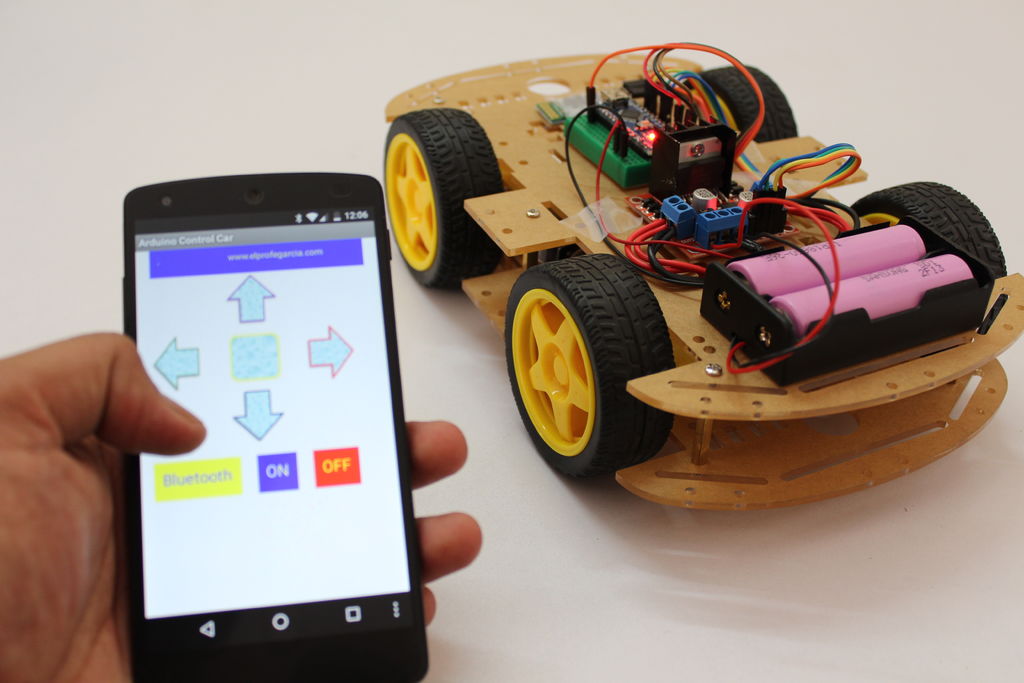
Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
Шаг 16: Тестирование


Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее

В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
На последней сессии я как обычно тщательно готовился к экзаменам (то есть не знал, чем себя занять), и как по счастливой случайности, у меня образовалась радиоуправляемая машинка, большая и красивая, хотя и явно рассчитанная на детей. Поигравшись минут десять, я захотел ее модернизировать, а именно вместо неудобного джойстика с радиусом действия в 3 метра использовать коммуникатор с bluetooth. И удобнее, и дальность действия больше, и явно видны дальнейшие улучшения, о которых, как впрочем и о процессе прикручивания коммуникатора к детской машинке, и пойдет речь в данной статье.
Выбираем компоненты
В прошлом мы с приятелями написали собственную прошивку для роботов Lego Mindstorms NXT, поддерживающую удалённое управление роботом по bluetooth с Android-коммуникатора. Для экспериментов тогда была приобретена отладочная плата Olimex SAM7 с ARM7 на борту, которую в этот раз можно использовать в качестве управляющего контроллера.
В качестве шасси используем корпус игрушечной машинки.
Нужен bluetooth-модуль. Результат хотелось получить быстро, поэтому модуль был выбран из единственного доступного в магазине на тот момент BTM-112, хотя он оказался сравнительно дорогим.
Кроме того, оказалось, что управление с платы не может идти напрямую на моторы, нужен усиливающий контроллер (об этом чуть позже).
- Машинка
- Управляющий контроллер Olimex SAM7
- Bluetooth-модуль BTM-112
- Контроллер для управления моторами L298N
Соединяем bluetooth с управляющей платой
Для начала настроим доставку команд управляющему блоку. Схема соединения bluetooth-модуля и контроллера простая: по сути дела это UART с некоторыми управляющими ножками, то есть надо лишь присоединить модуль к интегрированному UART-контроллеру.
Удалённое управление
Как было обещано, удаленное управление осуществляется с помощью Android-коммуникатора.
Наше прошлое приложение для Android (которое управляло Lego Mindstorms NXT, тоже посредством bluetooth) с помощью акселерометра отслеживало наклон коммуникатора и посылало соответствующие команды управления на NXT. Так что наиболее простым решением стало добавление протокола управления машинкой в уже существующее приложение. Сам протокол достаточно примитивен: фиксированная длина команды, фиксированный заголовок, после чего управление по осям X и Y.
Итак, на данном этапе мы можем “порулить” нашей платкой, правда моторы пока не подключены, так что индикация движений производится встроенными светодиодами (видео, к сожалению, нет, в этот момент снял только фотку), но всё равно прогресс есть, он виден, и это греет душу.
Соединяем управляющую плату с моторами
Изначально я думал, что смогу использовать управление со старой платы (зашитой в саму машинку), но оказалось, что использовать её в чистом виде нельзя, поскольку управление моторами было крепко сцеплено с радиочастью. Управлять моторами напрямую с ног головного контроллера тоже не получится из-за малой выходной мощности микросхемы. К сожалению, опыта в этой области у меня нет никакого (все-таки я программист, а не схемотехник), поэтому пришлось прибегнуть к помощи знакомых. По совету я взял микросхему усилителя L298N (избыточную для моих нужд, зато работающую из коробки) и собрал референсную схему.
Напомню, препарируемая машинка детская, и управление у нее немного хромает; когда я начал разбираться с моторами, я понял одну из причин. Для механизма поворота используется не сервопривод, а обычный электродвигатель, который может находиться в одном из трех состояний (выкл., вперед и назад). Таким образом, о плавном повороте мечтать не приходится.
В общем, функционально схема простая, один мотор используется как двигатель, второй мотор — как руль (у него стоит блокиратор на определенном угле поворота).
Для управления каждым мотором нужно подать напряжение на соответствующие управляющие ноги (положительное или отрицательное напряжение либо нуль). Напряжение измеряется между двумя точками (входными ногами управления), то есть мне нужно подавать напряжения на пару управляющих ног как-то так:
| forward | reverse | off | ||
|---|---|---|---|---|
| PIN1 | 1 | 0 | 0 | 1 |
| PIN2 | 0 | 1 | 0 | 1 |
Код получился очень простой, я не буду приводить его здесь, но в конце поста есть ссылки на исходники всего проекта.
- Дискретное управление лево/право, вперед/назад. Сейчас управление моторами осуществляется с помощью GPIO, но выбранные для управления линии могут быть переназначены под PWM контроллер. Таким образом, повороты и ускорение будут плавным.
- Дорогой усилитель. Тут всё просто, заменить на более дешёвую микросхему или схему на нескольких транзисторах.
- Скромные возможности. Раз управление осуществляется с помощью смартфона, то можно как-либо расширить функциональность по сравнению с просто пультом управления.
Где посмотреть
Весь код есть в открытом доступе.
Прошивка для платы Olimex — тут.
Код Android приложения тут, собранная версия на Android Market.
Во многих проектах на ардуино предлагается сделать то же самое, что продается в магазинах, но с гораздо большими трудовыми и материальными затратами. Сегодняшний проект не такой, смарт-машинки продаются в магазинах, но стоят в среднем раз в 5 дороже, чем RC-машинки. Поэтому я решил поделиться, как можно переделать практически любую RC-машинку в модную нынче машинку с приставкой «смарт» при помощи ардуино. Вот демо видео того, что получилось в итоге:
Итак, переделывать я решил стандартную RC-машинку, купленную в магазине игрушек примерно за 500 рублей.

Переделку можно осуществить двумя основными способами:
1. Подключить ардуино к пульту ДУ от машинки
2. «Вживить» ардуино внутрь самой машинки
Я решил попробовать оба способа, но сегодня расскажу только про первый, поскольку он несколько проще, а начинать лучше с простого.
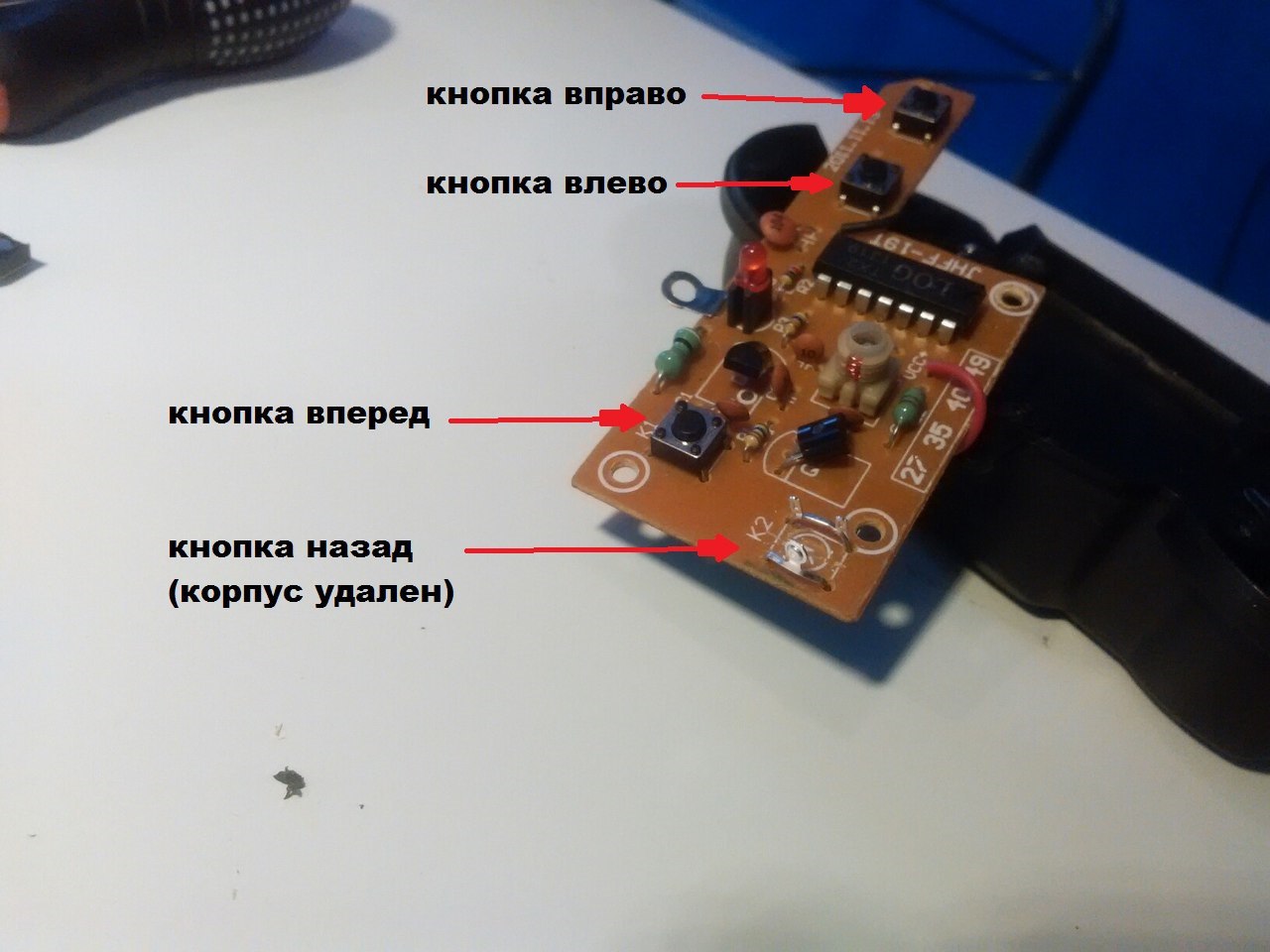
Чтобы подключиться к пульту ДУ, его нужно сначала разобрать и удалить те 4 кнопки, которые отвечают за движения вперед-назад и повороты вправо-влево. Можно их отпаять, а можно просто сломать корпус кнопок, оставив только контакты.
Вместо четырех кнопок подключаем четырехканальный блок реле по схеме:
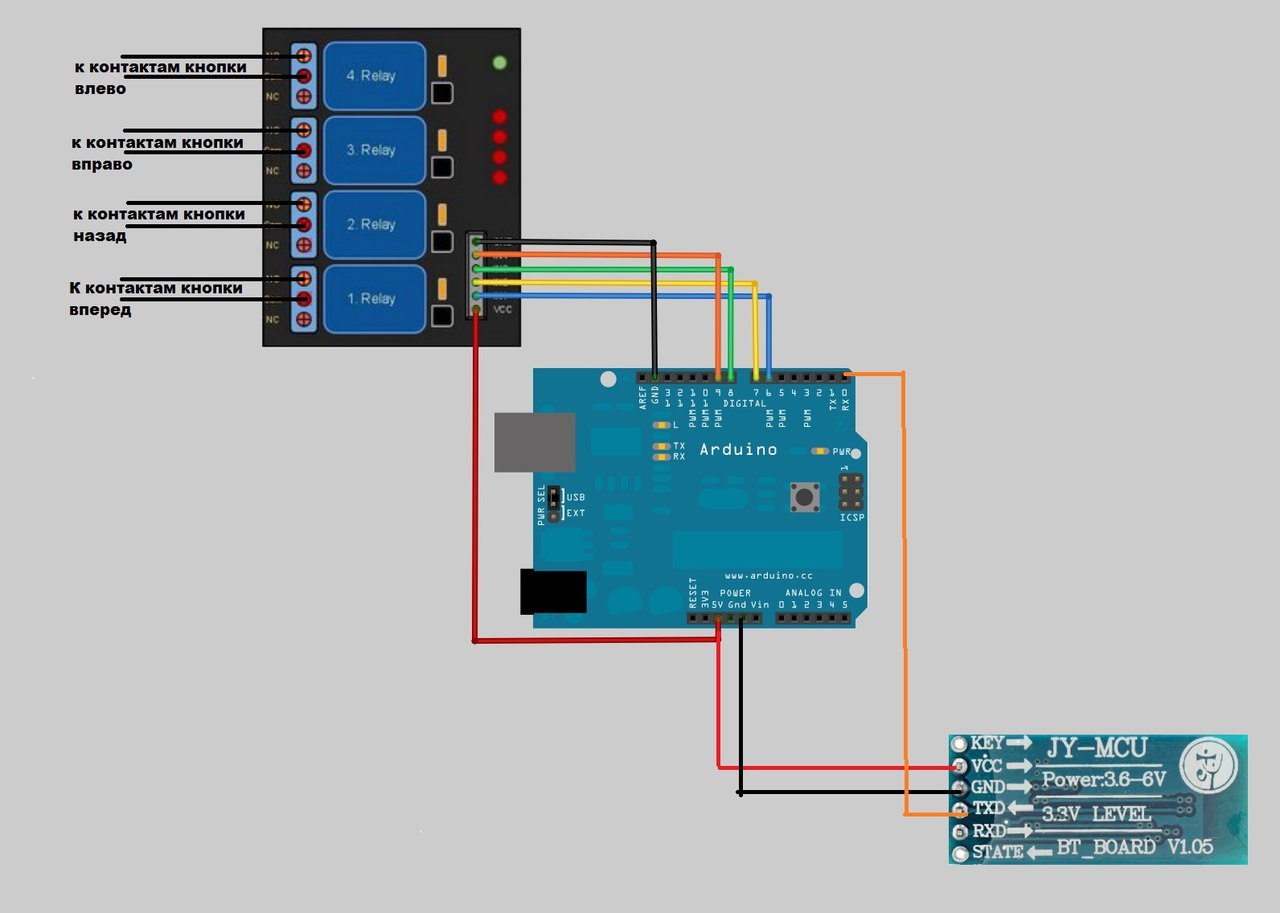
Блок реле подключаем к ардуино, а она уже будет получать сигналы со смартфона посредством блютуз модуля. Скетч для ардуино
unsigned long incomingByte;
int LED2 = 6;
int LED3 = 7;
int LED4 = 8;
int LED5 = 9;
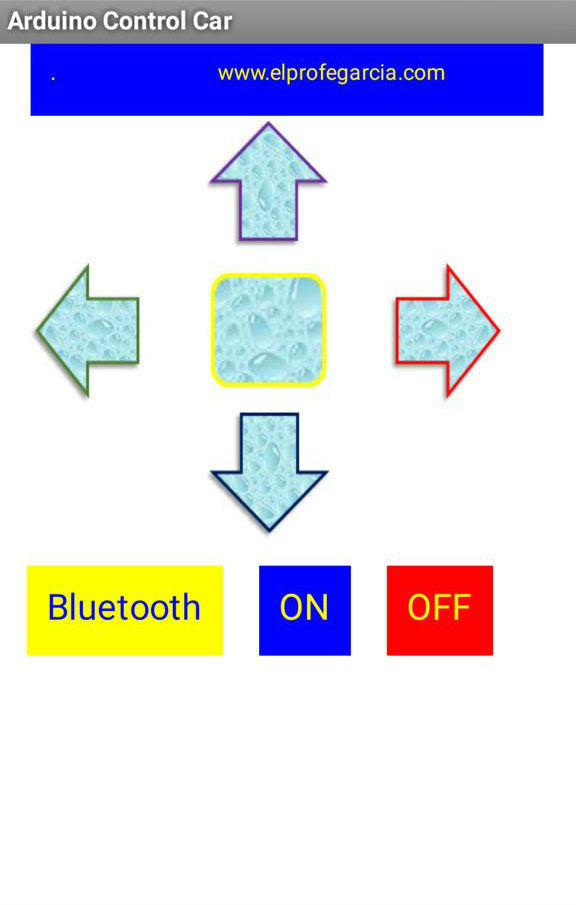
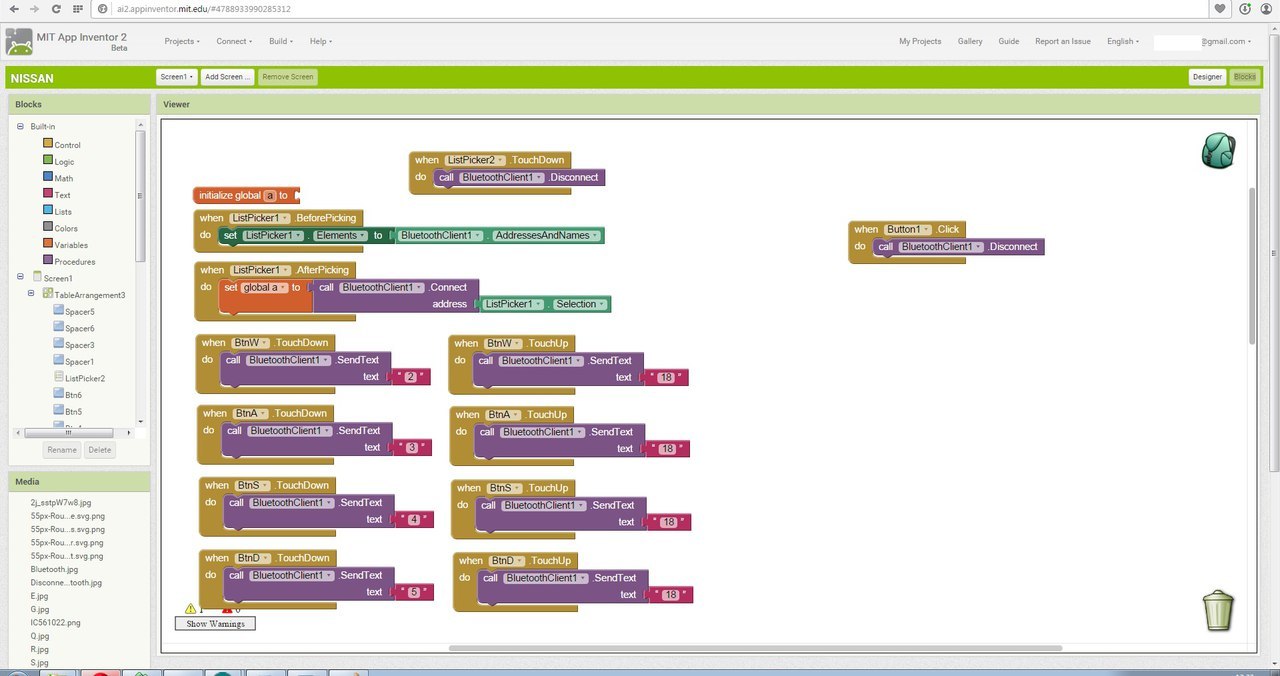
Теперь нужно сделать простенькое приложение для управления всем этим на подобии этого:

Приложение я сделал в среде визуальной разработки андроид приложений App Inventor 2.
Выглядит оно приложение так:
Ну и в конце фото того, как эта схема управления выглядит. Упаковывать все это в коробку не стал, поскольку в планах есть внедрение ардуино непосредственно в корпус этой машинки.

P.S. Сборник из более 100 обучающих материалов по ардуино для начинающих и профи тут
P.P.S. Онлайн курс по ардуино на гиктаймс здесь.

В этом уроке мы с Вами подготовим для переделки приобретённую мною модель Mercedes-Benz SLS AMG, масштаб 1:14.
Выясним, как устроена модель и её пульт управления. Определим тип радиоуправления: дискретное или пропорциональное. Рассмотрим, как работает пульт управления и как реагирует модель на его команды. Подготовим нашу модель к переделке.
Давайте попробуем разобраться, как функционирует система дистанционного управления нашей машинки.
Передатчик
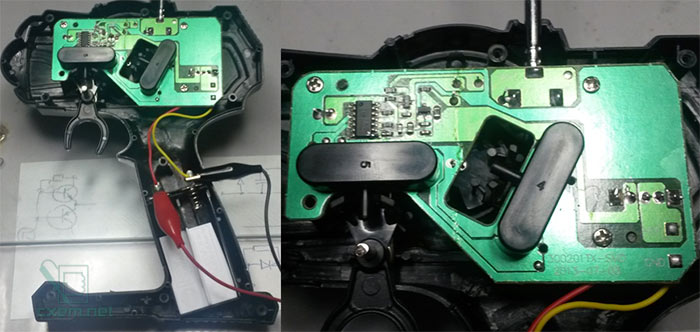
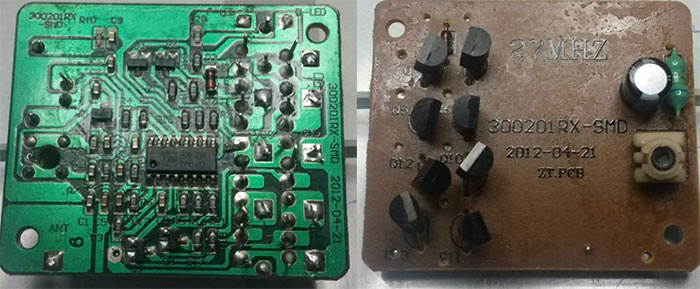
Разобрав нашу модель, её пульт управления мы выяснили, что передатчик построен на микросхеме TX-2B, а приёмник, установленный в машинке на микросхеме RX-2B.

Типовая схема передатчика представлена на схеме ниже:
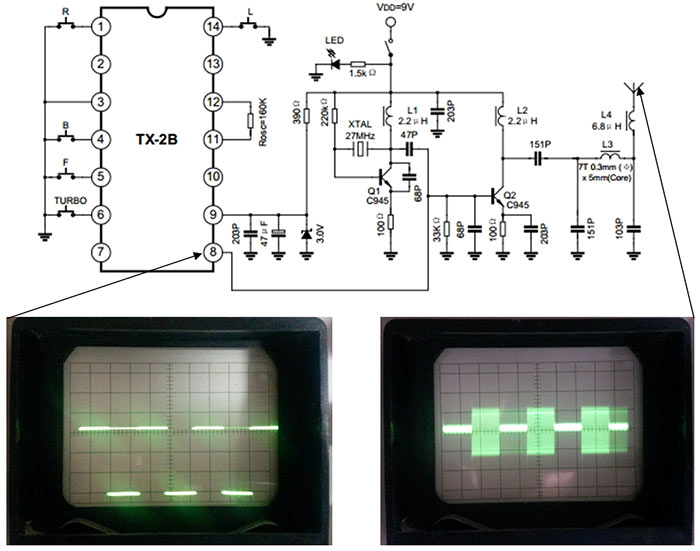
При нажатии на кнопки управления микросхема TX-2B формирует командную импульсную последовательность. С выхода SO данные поступают на ВЧ передатчик с амплитудной модуляцией.
Передатчик устроен следующим образом: на транзисторе Q1 собран генератор несущей частоты 27МГц. На транзисторе Q2 собран усилитель высокой частоты с функцией модулятора.
Типовая схема приёмника представлена на схеме ниже:
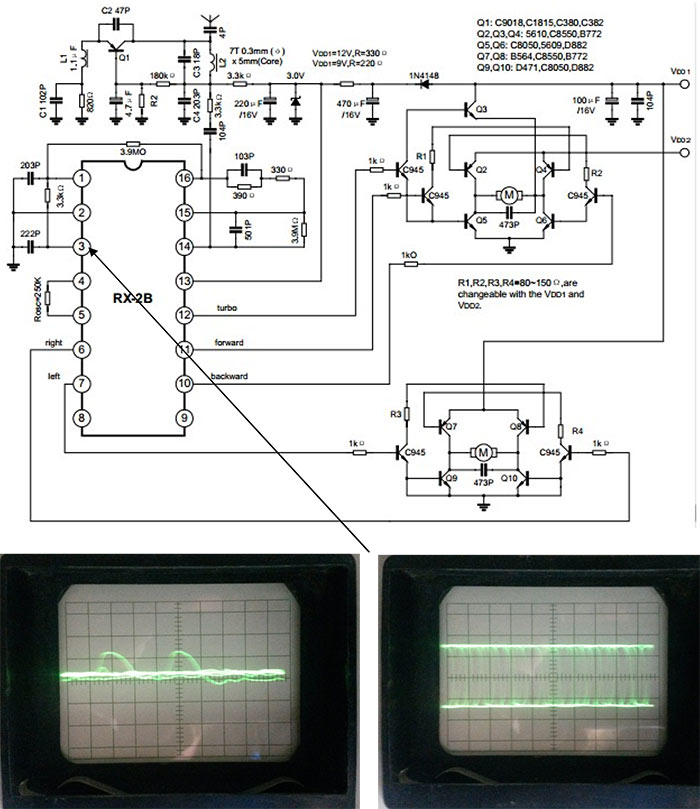
В отсутствии команд поступающих с пульта управления передатчик непрерывно принимает шумы и помехи радиоэфира, левая эпюра.
При нажатии одной из кнопок управления приёмник, собранный по классической схеме сверхрегенератора, принимает сигнал пульта управления, демодулирует и результат поступает на 3-ю ногу микросхемы RX-2B, правая эпюра.
В результате декодирования RX-2B переводит соответствующий управляющий вывод в высокое состояние.
Кто хочет идти "в ногу" с автором курса - создавайте свои дневники на форуме и выкладывайте что у вас получается и какие вопросы возникают при этом.
Читайте также: