
Как сделать игрушку на пульте управления
Обновлено: 15.05.2024
В последнее время стали довольно популярны антигравитационные машинки, которые ездят по стенам и потолку. Это достаточно интересная и необычная игрушка, работающая по принципу пылесоса, которая засасывает воздух из-под машины. В этой статье мы расскажем об эксперименте, как мы сделали похожую машинку в домашних условиях из подручных средств.
Нам понадобится
- - Гофрированный картон;
- - Моторчик (желательно скоростной);
- - 2 микромотора с редуктором;
- - ненужные USB провода;
- - тактовые кнопки;
- - батарейки ААА и Li-ion аккумуляторы от телефона;
- - паяльник, клей и т.д.,
Делаем машинку которая ездит по потолку
Первым шагом при изготовлении машинки в картоне делаем прорези как на картинке. С помощью линейки делаем ровные изгибы и отрезаем картон в отмеченных местах.
Далее делаем две небольшие полоски из обычной бумаги и клеем на нижнюю часть машинки, на углах полоски срезаем чтобы не цеплялись за неровности. Будущая рама готова.
С диска или подобного пластика вырезаем круглую заготовку, размером с 2-х рублевою монету и 4 лопасти 5х5мм. Не стоит делать турбину больших размеров, и много лопастей на турбине (оптимально 3 - 4 лопасти). Тесты показали, что большая турбина крутится медленней из-за большего забора воздуха, а двигатель греется в 10 раз больше, и эффект удерживания уменьшается в разы.
Для того чтобы лопасти не разлетелись от центробежной силы, проматываем их ниткой и пропитываем суперклеем.
Из обычной крышечки делаем колеса. Одеваем маленькую резинку для лучшего сцепления и отрезаем лишнюю часть крышки.
Берем два маленьких двигателя c редуктором (в нашем случае из квадрокоптера Syma x5), также можно использовать микро серво как MG-90 и подобные моторы с редуктором. Важно чтоб были маленькие, для экономии веса машинки.
Откусываем торчащую ножку около шестерни и приклеиваем термоклеем к шестерне колесо с крышечки, делаем два таких колеса.
Из-за веса АКБ пришлось отказаться от управления машинкой с помощью телевизионного пульта и Ардуино. Сделаем проводное управление.
Будем делать управление с помощью тактовых кнопок по такой схеме. Плюсами такой схемы в том, что можно использовать простые тактовые кнопки для управления, и для управления двух двигателей достаточно 3 передающих провода. А недостаток в том, что нужно 2 элемента питания и при движении в одну сторону 2 двигателя питаются от одного элемента что уменьшает мощность. И отдельно запитаем двигатель турбины от 2 последовательно соединенных литий-ионных АКБ.
Приклеиваем тактовые кнопки к пульту, устанавливаем две батарейки, подбираем и припаиваем провода нужного размера.
Для турбины снизу на пульт приклеиваем два последовательно подключенных АКБ, а пусковую кнопку для удобства крепим на ребре пульта (пусковая кнопка должна быть с фиксацией).
Заключение
Машинка работает, но это первый прототип и в нем есть несколько минусов, которые еще стоит доработать. К сожалению, не получилось сделать дистанционное управление от пульта как задумывалось, машинка падала из-за большого веса аккумуляторов, также в процессе теста стало понятно, что редукторы от квадрокоптера слабоваты, и лучше использовать редуктор с большим передаточным числом. Хорошо для этих целей подойдет небольшой доработанный двигатель с редуктором от серво привода MG-90. Игрушка получилась очень необычная, и шумная, легко держится на потолке, можно с удовольствием ездить по потолку, наматывая круги. Если у вас есть идеи как улучшить данную модель дайте знать, оставив комментарии.
Смотрите видео
Самое интересное конечно же в видео. Тут вы наглядно увидите как машинка шустро ностися по потолку квартиры.

В этом уроке мы с Вами подготовим для переделки приобретённую мною модель Mercedes-Benz SLS AMG, масштаб 1:14.
Выясним, как устроена модель и её пульт управления. Определим тип радиоуправления: дискретное или пропорциональное. Рассмотрим, как работает пульт управления и как реагирует модель на его команды. Подготовим нашу модель к переделке.
Давайте попробуем разобраться, как функционирует система дистанционного управления нашей машинки.
Передатчик
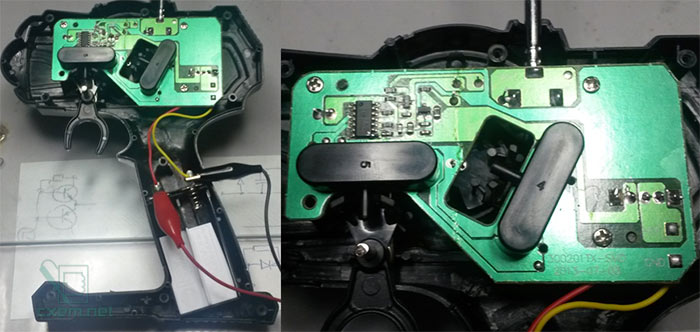
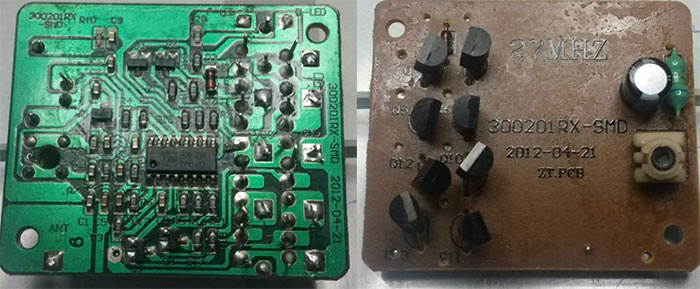
Разобрав нашу модель, её пульт управления мы выяснили, что передатчик построен на микросхеме TX-2B, а приёмник, установленный в машинке на микросхеме RX-2B.

Типовая схема передатчика представлена на схеме ниже:
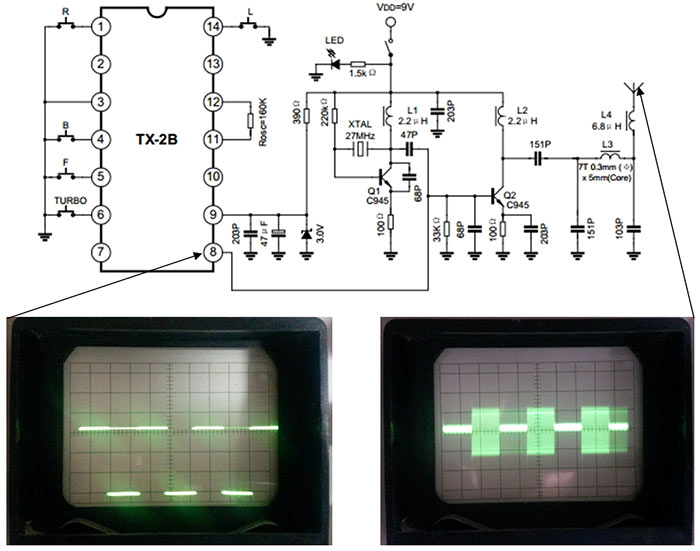
При нажатии на кнопки управления микросхема TX-2B формирует командную импульсную последовательность. С выхода SO данные поступают на ВЧ передатчик с амплитудной модуляцией.
Передатчик устроен следующим образом: на транзисторе Q1 собран генератор несущей частоты 27МГц. На транзисторе Q2 собран усилитель высокой частоты с функцией модулятора.
Типовая схема приёмника представлена на схеме ниже:
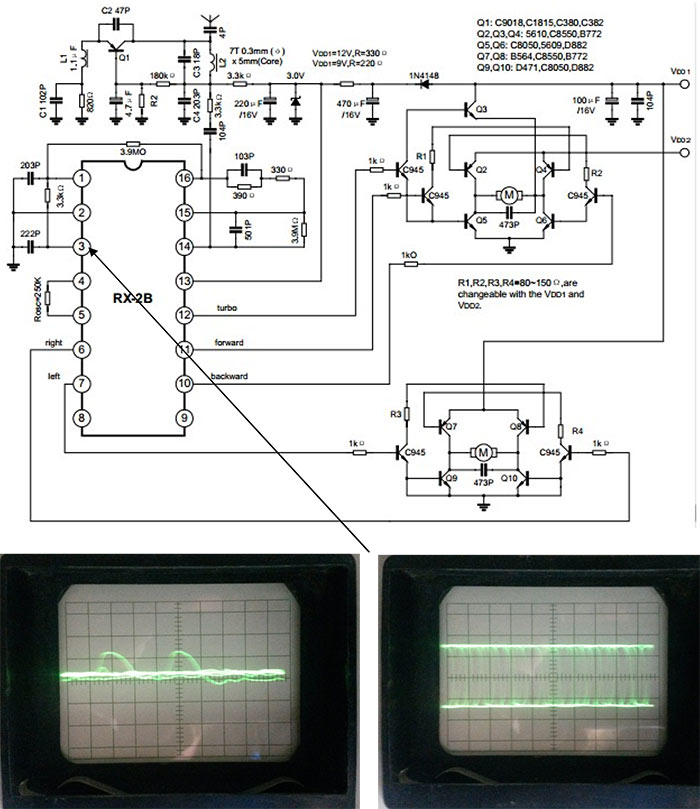
В отсутствии команд поступающих с пульта управления передатчик непрерывно принимает шумы и помехи радиоэфира, левая эпюра.
При нажатии одной из кнопок управления приёмник, собранный по классической схеме сверхрегенератора, принимает сигнал пульта управления, демодулирует и результат поступает на 3-ю ногу микросхемы RX-2B, правая эпюра.
В результате декодирования RX-2B переводит соответствующий управляющий вывод в высокое состояние.
Кто хочет идти "в ногу" с автором курса - создавайте свои дневники на форуме и выкладывайте что у вас получается и какие вопросы возникают при этом.

Несколько последних лет хотелось заполучить игрушку на пульте управления и обязательно с видео. Но не купить готовую, а сделать самому. И в итоге заказал себе вот такую игрушку, с простенькой системой управления, но большим потенциалом для модернизации. На все работы от старта и до почти завершения ушло ~ 9 месяцев. Большую часть этого времени ждал комплектующие из Китая.
Статью пишу по большей части для себя, что бы в дальнейшем не забыть что делал, как, зачем и почему.
Она будет содержать две основные части: аппаратную и программную и возможно еще одну часть про компоновку железа. Сначала опишу аппаратную часть, из чего собирал, с какими проблемами сталкивался и как их решал.
1. Аппаратная часть
Система состоит из пульта управления и аппаратуры установленной на машинке. Рассмотрим их подробнее.
1.1 Пульт управления
Game HAT
Game HAT был выбран т.к. это уже готовое решение совмещающие в себе экран, джойстик и клавиатуру достаточную для управления машинкой.

Джойстиком на этой плате является KY-023. Его решил использовать вместо руля. Но оказалось, что в Raspberry нет АЦП и единственные значения которые можно было получить от него 0 и 1, что явно недостаточно для плавного поворота колес.

ADS1115
Эту проблему решил модуль ADS1115.

Модуль был припаян к Game HAT и прикреплен к ней с помощью ленты 3M. Показания снимаются со средних ножек переменных резисторов на джойстике. Выглядит все так:

Джойстик по аналогии впаян в Game HAT. Провода припаяны к разъемам Game HAT, которые соответствуют разъемам питания и I2C на Raspberry. Схема подключения:

На этом аппаратный сбор пульта управления закончен. Внешне ни каких видимых изменений он не претерпел.
1.2 Машинка
Как это все ужасно выглядит под капотом:

- Raspberry pi 3
- Raspberry Pi Camera v2 NoIR
- PCA9685 ШИМ генератор
- Mini-360 понижающий преобразователь питания
- BMS CF-4S30A-A контролер заряда
- L298N драйвер управления двигателем
- Моя плата управления светом на основе драйвера L293
- 3 литий-ионных батареи 18650
- 370 мотор
- DI-1181MG сервопривод
Питание
Начнем от питания, его обеспечивают три аккумулятора 18650, соединенных последовательно и дающих ~ 12 вольт.
Аккумуляторы подсоединены через плату BMS CF-4S30A-A, что бы их можно было заряжать и не разрядить в ноль на покатушках.

Но это плата предназначена для 4-х аккумуляторов, поэтому она была переделана для работы с 3-мя аккумуляторами. Почему была взята она, а не 3S 40A BMS. Потому что она была под рукой.

Этим напряжением питается 370 мотор через драйвер L298N.


Для питания Raspberry используются напряжение с этих же аккумуляторов, но напряжение понижается модулем Mini-360 до 5 вольт.

Raspberry запитал прямо на его ножки.
Движение
Теперь поговорим о том, как машинка ездит. Для управления рулевым механизмом используется сервопривод DI-1181MG, который управляется с помощью PCA9685. Так же PCA9685 отвечает за управление мотором регулируя его скорость и направление вращения через драйвер L298N. Raspberry же управляет PCA9685 по I2C шине. PCA9685 питается от 5 вольт с понижающего преобразователя. Этого вполне хватает для сервы и управления мотором. Мотор подключен к двум выходам L298N для повышения мощности.

Видео
Для видео использовал Camera v2 NoIR, она легко подключается к Raspberry. Но без доработок не обошлось. Стандартный шлейф камеры был в длину 15 см. чего не хватило для монтажных работ. Так же этот шлейф нестандартный, он имеет 15 пинов. На aliexpress за один длинный шлейф для этой камеры китайцы хотят больше 1000 рублей. По этому был куплен комплект из 10 стандартных 16 пиновых шлейфов ~ за 300 рублей. И с помощью высокотехнологичной технологии применения канцелярских ножниц переделан в 15 пиновый шлейф для камеры.


На момент написания статьи, 2-ой месяц жду крепление для камеры в кабину. Пока что машинка показывает только потолок )
На машинке уже установлен штатный свет, состоящий из фар с 2-мя желтыми светодиодами. Осталось их только запитать.
Управление светом осуществляется через мою плату, которая сделана на основе драйвера L293. Питание на диоды подается через резистор. Плата сделана по технологии ЛУТ. На ней так же куча дорожек для разводки питания.
Можно было бы для управления светом воспользоваться PCA9685, на том момент когда делал свою не знал про PCA9685 и обходился без нее.

Представлю общую схему подключения:

А вот это, что стояло в машинке пока я не влез ))

К моменту написания уже начал забывать, что и как делал. Хотя прошло не больше месяца с момента монтирования.
По аппаратной части все. В следующей свое статье опишу программную часть, как оживлял железо.
Благодарность
Моим коллегам по работе: Андрею и Николаю за помощь с железом, Антону и Евгению за помощь в работе с видео. Самоделкин-22 за ЛУТ моей платы. И Мурзику.

Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн
Топ авторов темы
Сёха 124 постов
546 27 постов
RoboMstitel 30 постов
Изнаур 41 постов
Популярные посты
Deleted
как можно заниматься ремонтом чего либо, не имея элементарных знаний в этой области. твой вопрос практически в школе объясняли. научили "мастеров" чинить всю технику, только и знают - "беременн
Bogdan Vaschenko_149202
"И вдруг, как по волшебству нашлись радиомодули, которые меня устроили. Небольшого размера, при питании +5В передатчик потребляет 40мА и имеет мощность 15dBm, что довольно таки не плохо! И я купил их,
Изображения в теме
У меня и вопрос, что с ней не так? Если не трудно укажите пожалуйста место. Просто эта схема, я сейчас нашел, взята из мануала-производителя ооо "энкор инструмент воронеж", которым комплектуется продукция. Производитель распространяет заведомо нерабочие схемы получается?



(Не знаю, сюда ли писать, да и надо ли было, хотя, если у меня была проблема, то м.б. и кому-то понадобится. ) Имеется напольный вентилятор, моделей миллион, конкретно у меня "aceline". Проблема в сильном нагреве двигателя. (Мне объяснили, что китайцы просто экономят на проводах обмотки, укладывая мало витков). Снял кожух, снял привод поворачивания в стороны, на его червяк посадил крыльчатку от комповского вентилятора. Всё равно сильно греется. На максимальных оборотах не так сильно (но на них чуть "с горшка" не сдувает), а на маленьких охлаждение хуже при той же мощности, соответственно очень сильный нагрев. Пришла в голову идея уменьшить питающее напряжение, а включать максимальные обороты. ПОМОГЛО. ЛАТРом отрегулировал напряжение около 120 В АС. Дует чуть слабее, чем на минимальных для 220 В, ну а мне такие и нужны. Шумы минимальны (практически не слышны), ночью использовать самое то. ЛАТР надо освобождать, слишком "жирное" применение. Ставить диммер на тиристоре не хочу, они обычно немного "трещат" при работе, ночью будет слышно. Измеренные 120 В сразу привели к ассоциации на 127 В. Надо делать автотрансформатор на старом трансе. Мощность вентилятора по паспорту 50 Вт, начал искать трансформатор на 100 Вт (с запасом). На глаза такой не попадается (подобное старье, увы, давно выброшено). Но напряжение питания если в два раза меньше, то и потребляемая мощность должна упасть в четыре раза! трансформатор будет искать легче. Решил замерить потребляемый ток - 130 мА. Сразу в голову мысль - а если гасящий конденсатор, ток ведь маленький. По расчету вышло около 2 мкФ. Подключил парочку 2.0 + 0.47 мкФ (оба на 275 АС!). Всё заработало! Напряжение на вентиляторе около 140 В, дует чуть сильнее, включил на средние обороты. Через полчаса работы движок по нагреву "чуть живой".
Это фрагмент схемы с подключением электродвигателя, скорее всего из какого-то мануала. А чего в ней не хватает?

не правильно понимаете. основная задача принять на себя выбросы ЭДС-самоиндукции нагрузки , а в вашем случае , из-за собственной индуктивности электролита этот выброс будет лесть в слаботочку по питанию , а поставленный вами диод еще и вольтдобавкой послужит. и где под него запланированное место? или планируете в силовой части отделаться СМД-керамикой? это плохая идея. окей что мешает их расположить в линию? сразу получив силу перпендикулярно слаботочке затворов?

Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

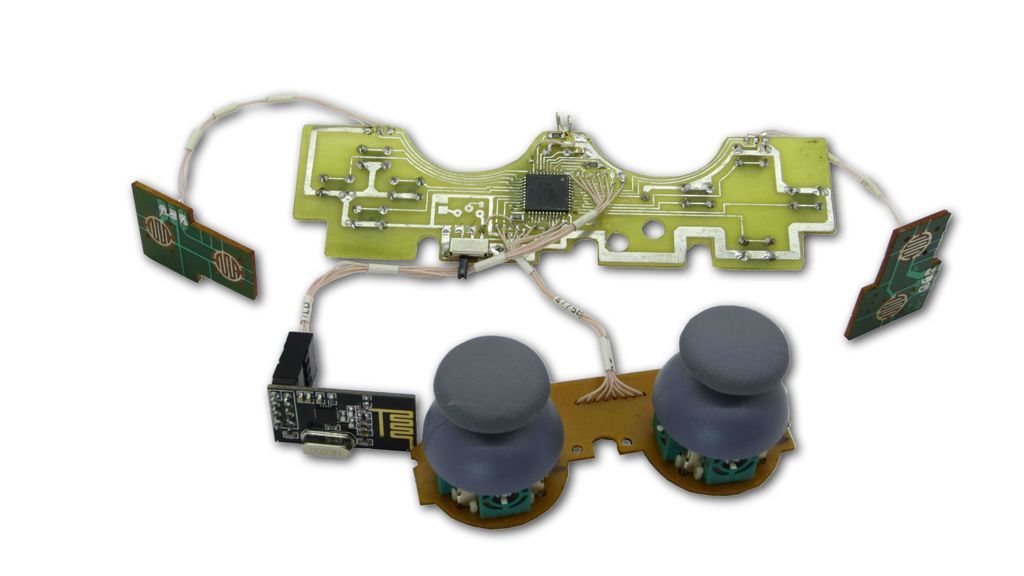
Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Читайте также: