
Как сделать радиоуправляемую игрушку своими руками
Обновлено: 11.05.2024
Система радиоуправления позволяет дистанционно управлять игрушкой на расстоянии до 10 метров.
Рабочая частота передатчика 27,12 мГц.
Мощность передатчика в пределах 4-10 мВт.
Потребление тока передатчиком не более 20 мА.
Вес передатчика с антенной и питанием не более 150 г.
Чувствительность приемника в рабочей полосе частот не хуже 100 мкВ.
Потребление тока приемником не более 20 мА.
Вес приемника не более 70 г.
Командоаппарат обеспечивает выполнение четырех различных команд, которые повторяются периодически.
Вес командоаппарата не более 70 г.
Питание приемника и передатчика производится от батарей "Крона-ВЦ".
Принцип работы
Передатчик состоит из модулятора и генератора высокой частоты (рис.1). Модулятором передатчика служит симметричный мультивибратор, собранный на низкочастотных транзисторах VT2 и VT3 типа МП40.
Генератор высокой частоты собран на транзисторе VT1 типа П416 по схеме с емкостной обратной связью. При открытом транзисторе модулятора VT2 цепь генератора замыкается на плюс батареи, генератор возбуждается на рабочей частоте, сигнал высокой частоты излучается антенной.
Приемник состоит из высокочастотного каскада, усилителя низкой частоты и электронного реле.
Высокочастотный каскад приемника представляет собой сверхрегенератор. Сверхрегенератор собран на высокочастотном транзисторе VT1 типа П416 (рис.2).
При отсутствии сигнала на эмиттерной цепочке С5 R3 наблюдаются колебания частоты гашения. Частота гашения определяет чувствительность сверхрегенератора на его рабочей частоте и подбирается элементами С5, R3.
Командный сигнал передатчика выделяется контуром L1-С4, усиливается и детектируется сверхрегенератором. Фильтр R4-С8 пропускает сигнал команды низкой частоты на вход усилителя VT2, отделяя при этом частоту гашения более высокого порядка.
Электронное реле собрано на транзисторах VT3-VT4 типа МП40, п коллектор транзистора VT4 включено исполнительное реле КР типа РСМ-1.
Напряжение низкой частоты командного сигнала усиливается транзисторами VT3-VT4 и подается через конденсатор С13 на вы-прямительную ячейку УД1, УДЗ.
Выпрямленное напряжение через резистор R9 поступает на базу транзистора VT3. При этом эмиттерный ток транзистора VT3 резко увеличивается, транзистор VT4 открывается. Реле срабатывает, замыкая цепь питания двигателя командоаппарата.
Командоаппарат состоит из электродвигателя, храпового механизма, программного диска и распределительных скользящих контактов. Программный диск, боковая сторона которого представляет собой систему перемычек, коммутирует через распределительные скользящие контакты питание двигателей привода и других электрических элементов игрушки.
Описание электрической схемы радиоуправляемой игрушки
На схеме (рис.3) показан один из вариантов электрооборудования радиоуправляемой игрушки.
В игрушке имеются два приводных двигателя, которые обеспечивают движение вперед и повороты налево и направо. Лампочки задних фонарей игрушки служат сигналами поворота. Две фары создают эффект освещения пути движения игрушки.
Для приема сигналов команды от передатчика в игрушку вмонтированы приемник и Командоаппарат. Двигатель привода и командоаппарата, а также лампочки питаются от двух последовательно соединенных батарей типа 3336Л(У) (GB1). Для питания приемника служит батарея "Крона-ВЦ" (GB2). Для выключения батареи служит двухполюсный выключатель S. При поступлении сигнала команды от передатчика срабатывает реле КР, приемника и своими контактами включает электродвигатель командоаппарата (рис.4)МЗ.
Электродвигатель МЗ с помощью храпового механизма поворачивает программный диск на 30°, что соответствует переключению одной команды.
Программный диск через распределительные скользящие контакты включает электродвигатели привода и лампочки игрушки следующим образом:
В положении "вперед" замкнуты контакты 1, 2, 3, 4, при этом включены двигатели М1 и М2, а также лампочки Н1, Н2, НЗ, Н4.
В положении "направо" замкнуты контакты 1, 2, при этом включены двигатель М1 и лампочка НЗ.
В положении "стоп" все контакты разомкнуты.
В положении "налево" замкнуты контакты 1, 3, при этом включены двигатель М2 и лампочка Н4.
Команды меняются периодически. На схеме показана последовательность команд за один цикл.
Указания по монтажу и наладке системы
Размещение приемника в игрушке желательно производить на максимальном удалении от эл. двигателей и электромагнитов. Для защиты приемника от помех, создаваемых электродвигателями, рекомендуется включать параллельно электродвигателям электролитические конденсаторы 10-20 мкф рабочим напряжением 10-12 вольт, соблюдая полярность включения. К приемнику необходимо подключить антенну. В качестве антенны может быть использован штырь или провод диаметром 1,0-2,0 мм, длиной не менее 20 см. Антенну необходимо изолировать от корпуса игрушки. В качестве изоляторов можно использовать детали из керамики, фторопласта, оргстекла или полистирола. С увеличением длины антенны дальность управления увеличивается. Приемник необходимо закрыть крышкой из изоляционного материала для защиты от пыли и влаги. Расстояние от печатной платы до основания, на котором укреплен приемник, должно быть не менее 5 мм.
Расположение элементов на печатной плате показано на рис.5.
После монтажа электрической схемы и проверки работоспособности (порядок включения указан далее) необходимо подстроить приемник на максимальную чувствительность. Подстройка производится с помощью конденсатора С4 (см. принципиальную схему и чертеж приемника). Поворачивая ротор конденсатора изоляционной отверткой, необходимо найти положение, при котором срабатывание реле происходит при максимальном удалении игрушки ог передатчика.

Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн
Топ авторов темы
Сёха 124 постов
546 27 постов
RoboMstitel 30 постов
Изнаур 41 постов
Популярные посты
Deleted
как можно заниматься ремонтом чего либо, не имея элементарных знаний в этой области. твой вопрос практически в школе объясняли. научили "мастеров" чинить всю технику, только и знают - "беременн
Bogdan Vaschenko_149202
"И вдруг, как по волшебству нашлись радиомодули, которые меня устроили. Небольшого размера, при питании +5В передатчик потребляет 40мА и имеет мощность 15dBm, что довольно таки не плохо! И я купил их,
Изображения в теме

Здравствуйте. Есть АС на вот таких динамиках. Я короче не знаю кто, что делал, но такие достались. Без фильтров. Просто ВЧ через конд 1мкф. Хочу простенький первого порядка хотя бы сделать. Посоветуйте частоту разделения для рассчета в JBL SS. Cкажете сейчас слушать нужно и всё такое. Всё знаю. Колонки не для аудиофильства. Для всяких выездные мероприятий что бы ну хоть что то стояло а не просто 1мкф на ВЧ.


Вы бы привели полный список без чего вам надо сделать и на чем . А если на МК - это будет всего одна деталь .

У движков пишут механическую мощность (у асинхронных промышленных) . Если измерять ток и напряжение, то будет потребляемая мощность.
Как сделать машинку на радиоуправлении своими руками

Каждый ребёнок хочет иметь машину на радиоуправлении. На сегодняшний день такие машинки достаточно дорогие, а дети их быстро ломают, но не стоит паниковать зря.
Умелые руки, фантазия и подручные материалы позволят самостоятельно сделать такую машину из картона, которая не уступит по мощности и проходимости покупным машинкам из пластмассы.
Для её изготовления нам понадобится:
· картон из ящиков,
· строительный нож,
· карандаш, линейка,
· клей,
· двигатели постоянного тока,
· провода,
· кнопка включения и выключения,
· паяльник,
· джойстик управления,
· аккумулятор,
· пластиковый кружок, пластиковые трубочки,
· резинки,
· металлическая палка,
· пластиковая обложка для книг,
· пластиковые крышки от пластиковых бутылок 6 штук,
· деревянные палочки,
· светодиоды и конденсаторы.
Начальный этап
Для начала возьмём лист картона 9/ 28 см. и вырежем в нём несколько деталей.
С левой стороны вверху, отступите примерно 1,5 см. от бокового края и вырежьте прямоугольник 3/ 4,5 см, то же самое сделайте снизу, а с правой стороны сверху отступите примерно 4,5 см. и вырежьте прямоугольник 2/ 4,5 см., идентичный вырежьте снизу.Между этими прямоугольниками посередине вырежьте полоску 1/ 4,5 см. Эта деталь послужит нижней частью нашего автомобиля.
Гусеничный танк на радиоуправлении своими руками

Немного отвлечемся от радиоуправляемых летающих игрушках и спустимся на землю. Сегодня расскажу как своими руками за копейки сделать платформу для гусеничной техники на Р/У. На платформу можно будет поставить танк, экскаватор, бульдозер или всё то, что придёт вам в голову.
Самоделки на радиоуправлении — очень занимательное хобби.
Нам понадобится 2-х канальный передатчик, пульт управления (джойстик), два 9Г сервопривода, старая велосипедная камера, лист пластмассы и 8 палочек от мороженного. А да, не забываем про аккумулятор Li-Pol 3.7 В на 150 мАч.
Клей, кусочки, нож и ножницы берём на полке.

В качестве двигателей будут использоваться сервоприводы. Необходимо разобрать из и срезать ограничители на шестернях. Стандартные провода срезаем и припаиваем по 2 провада на каждый моторчик (+ и — соответственно).
Из пластмассы вырезаем пластину 40 на 100 мм и две пластины 20 на 100 мм. В маленькие пластины монтируем сервоприводы. И при помощи клея собираем каркас.

Ролики делаем также из пластмассы: кропотливо и аккуратно вырезаем 12 кружков диаметром 20 мм и 8 кружков по 30 мм. Склеиваем 3 маленьких кружка, а по краям 2 больших. Так мы получаем 4 катка. Крепим к раме на болты, просверлив отверстия в катках и в раме.

Из старой велосипедной камеры вырезаем две полоски длиной 25мм и шириной 6 мм. Каждую полоску склеиваем.
Да клей выдержит, нагрузки на стык большой не будет.
Палочки от мороженного режим на полоски по 14 мм и приклеиваем продольно на изготовленную гусеницу.
Миг 29 из EPP пенопласта на радиоуправлении
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками.
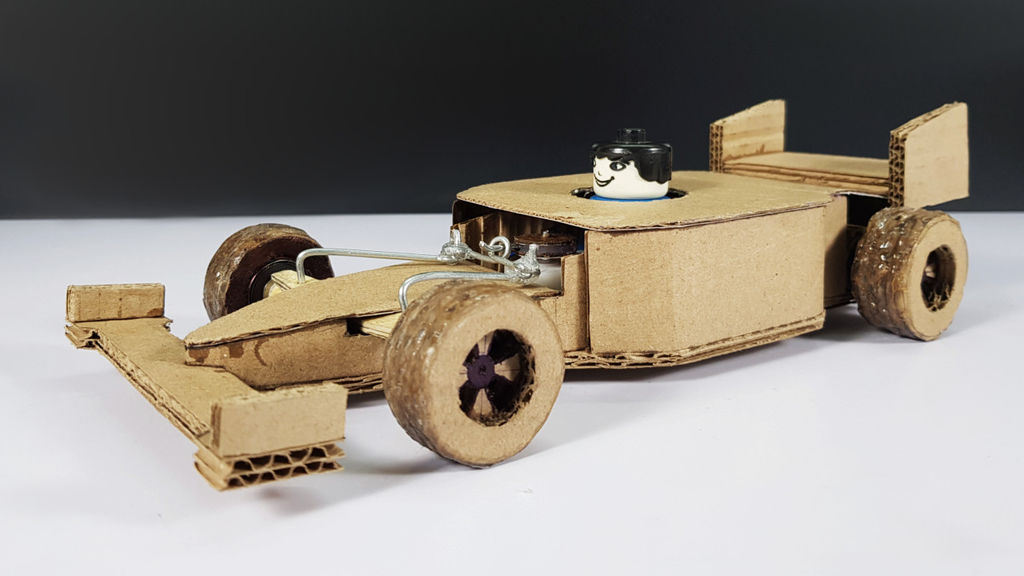
В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома.
Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн.
Шаг 1: Смотрим видео
Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок.
Шаг 2: Детали
- Высокоскоростной DC моторчик (Ebay или Amazon)
- DC моторчик с шестерёнкой (Ebay или Amazon)
- Модуль TP4056 (Ebay или Amazon)
- Литий-ионный аккумулятор (Ebay или Amazon)
- Выключатель (Ebay или Amazon)
- Пластиковые шестерёнки (Ebay или Amazon)
- Подшипник (Ebay или Amazon)
- Палочка от мороженого (Ebay или Amazon)
- Пистолет для горячего клея (Ebay или Amazon)
- Канцелярский нож (Ebay или Amazon)
В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода.
Заметка: схема, которую я использовал, была добыта из старой сломанной радиоуправляемой машинки.
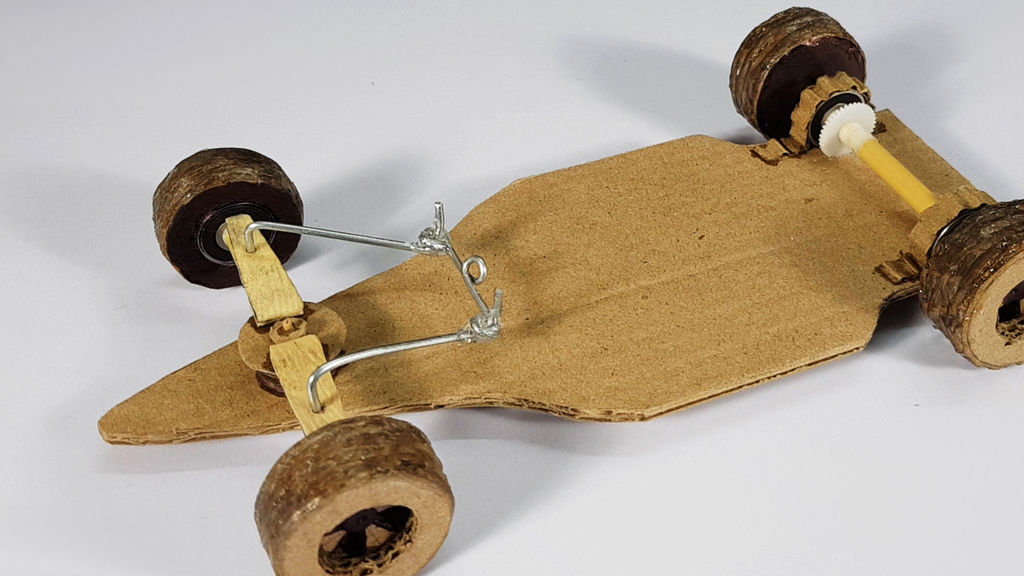
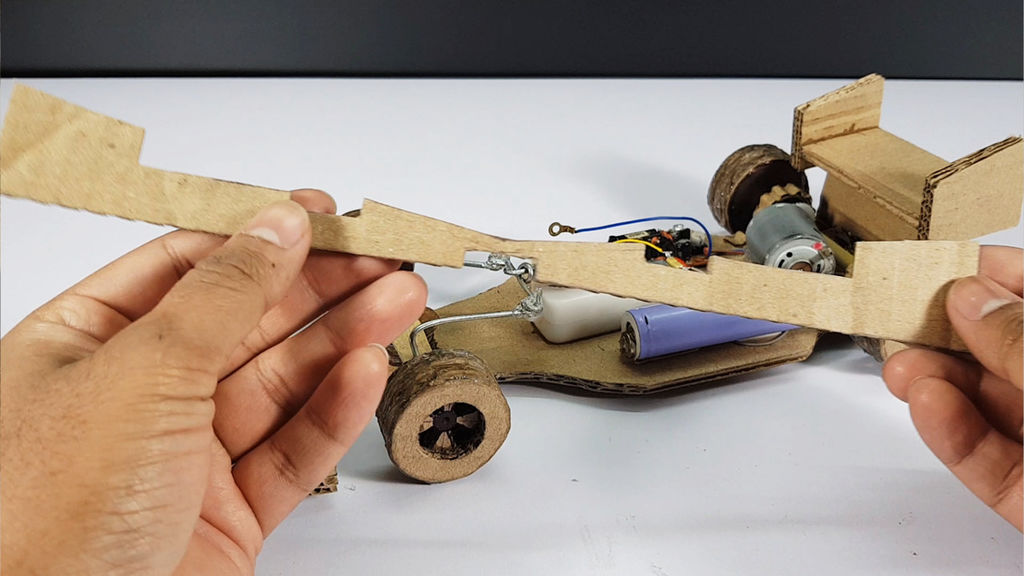
Шаг 3: Изготавливаем основу и заднюю ось
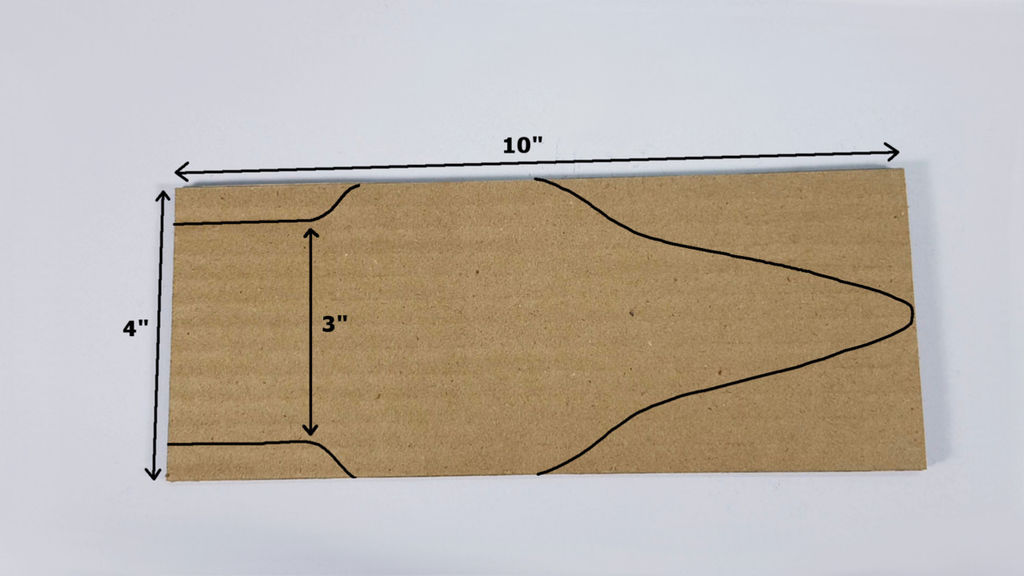


- Отрежьте кусок картона примерно 10*25 см
- Основываясь на картинке сверху, вырежьте основу для машинки F1
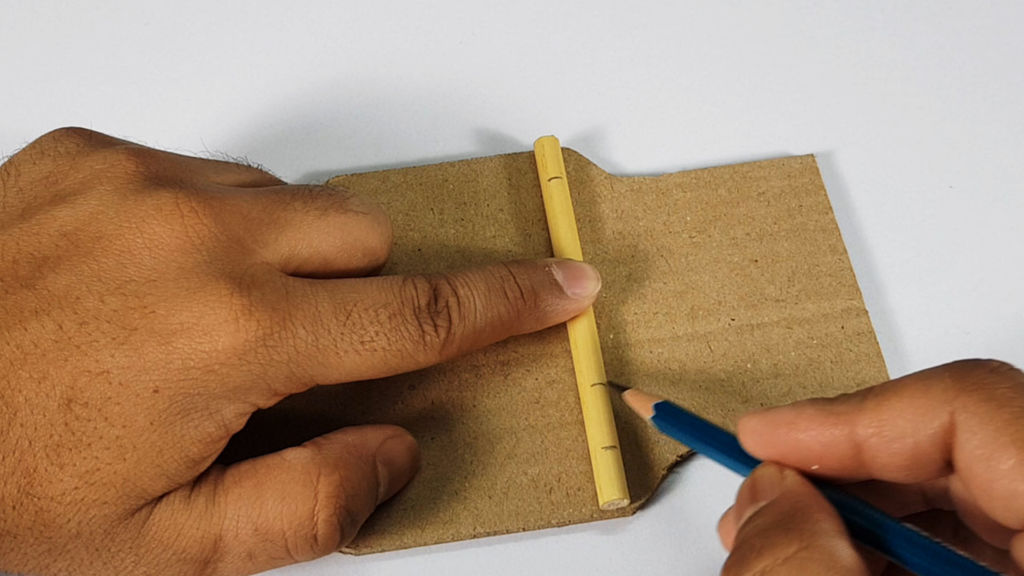
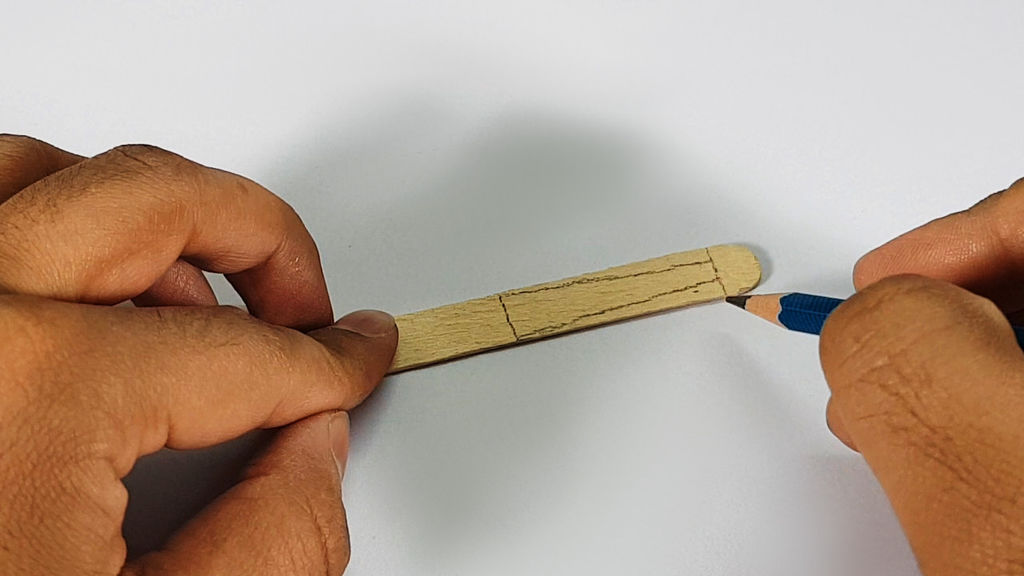
- Вырежьте деревянную палочку длиной 10см и сделайте на ней три отметки, как показано на картинке
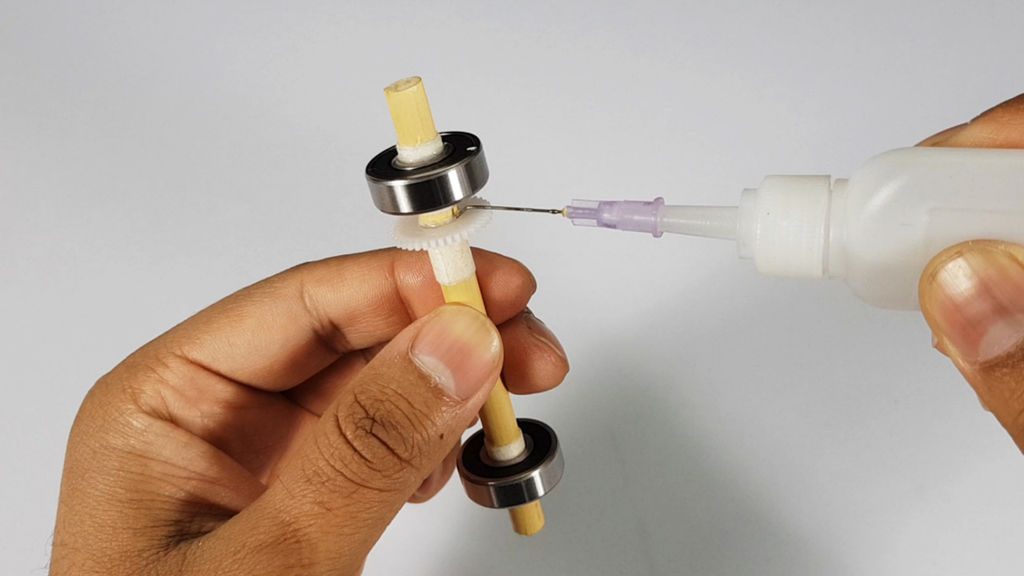
- Возьмите пластиковую шестерёнку и просверлите отверстие, равное диаметру деревянной палочки
- Закрепите шестерёнку на второй отметке и приклейте её суперклеем
- Закрепите подшипники на остальных двух отметках и также закрепите их суперклеем
Заметка: Для увеличения диаметра палочки можно использовать изоленту.
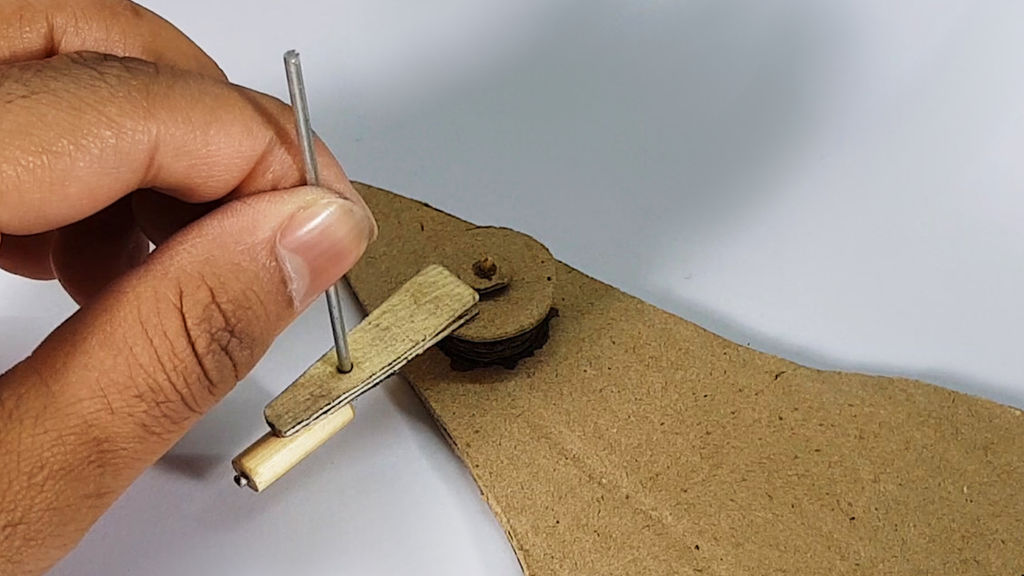
Шаг 4: Изготавливаем самодельный рулевой механизм
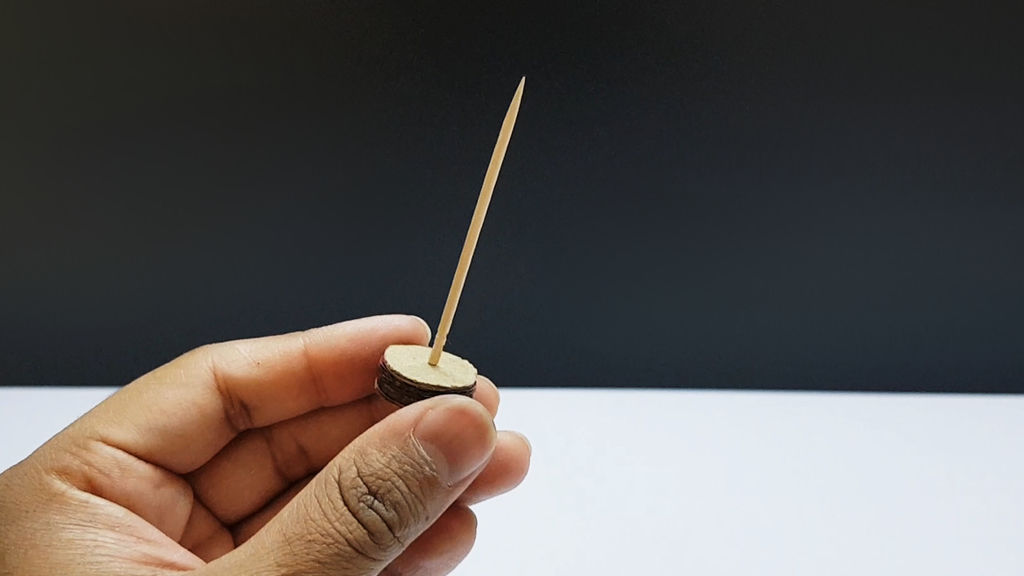
- Вырежьте несколько кружков из картона и сложите их один на другой.
- Просверлите отверстие в их центрах и закрепите там зубочистку.
- Поместите круглую картонку с зубочисткой в нос основы машинки, как показано на картинке.
- Вставьте еще один кусочек картона поверх зубочистки и закрепите его суперклеем, так чтобы он мог свободно вращаться.
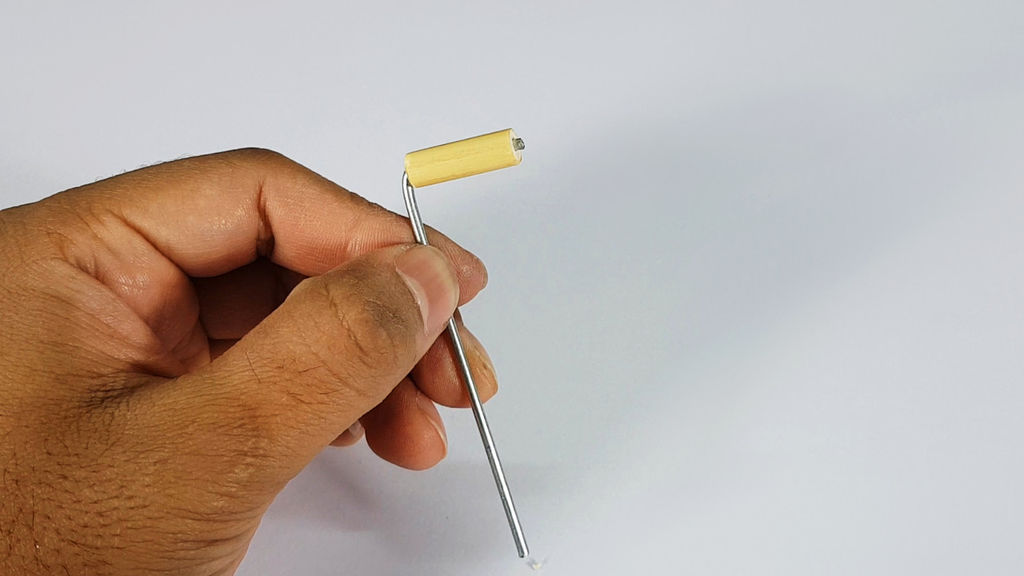
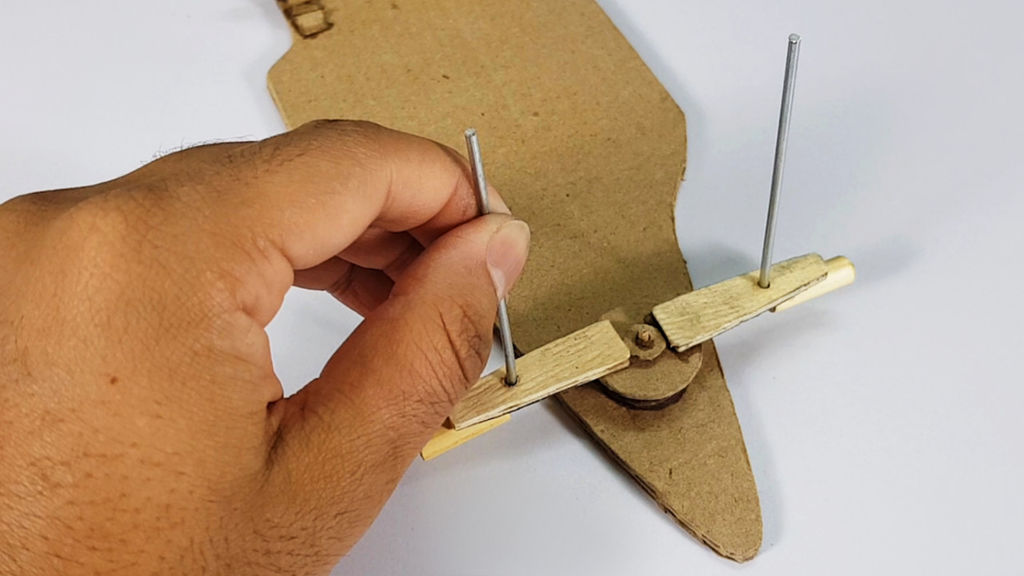
- Возьмите кусочек толстой стальной проволоки (как с настенного календаря) и согните её под углом 90° на расстоянии примерно 2,5 см.
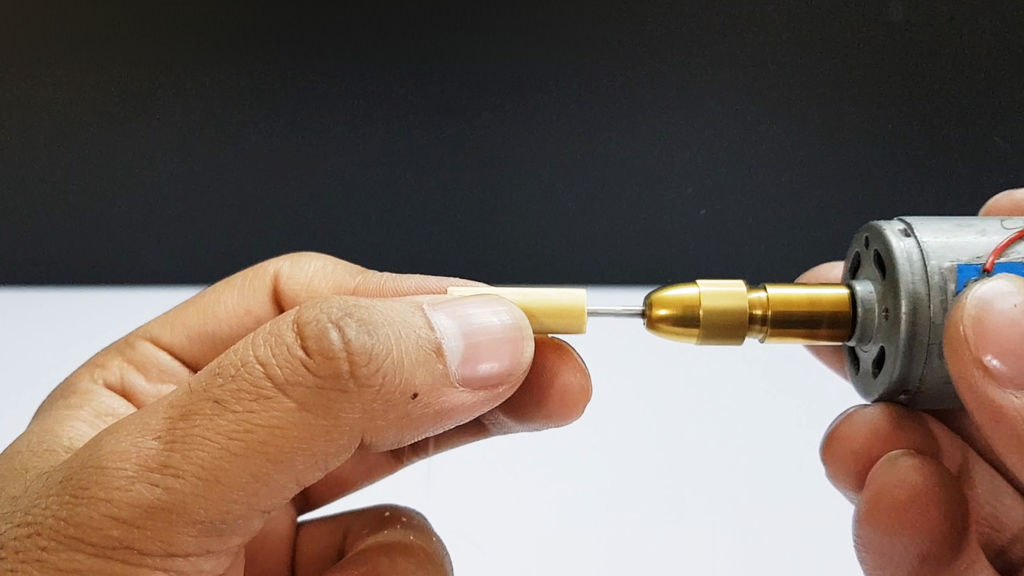
- Вырежьте деревянную палочку и сделайте отверстие в её центре при помощи мини-дрели.
- Вставьте толстую проволоку в отверстие и закрепите её суперклеем.
- Вырежьте несколько кусочков из палочки от мороженого, как показано на рисунке, и сделайте в них отверстия примерно на 3/4 от центральной точки.
- Соберите части вместе и закрепите их на основе машинки, как показано на картинке.
Заметка: обязательно посмотрите видео, чтобы избежать ошибок.
Шаг 5: Изготавливаем картонные колёса
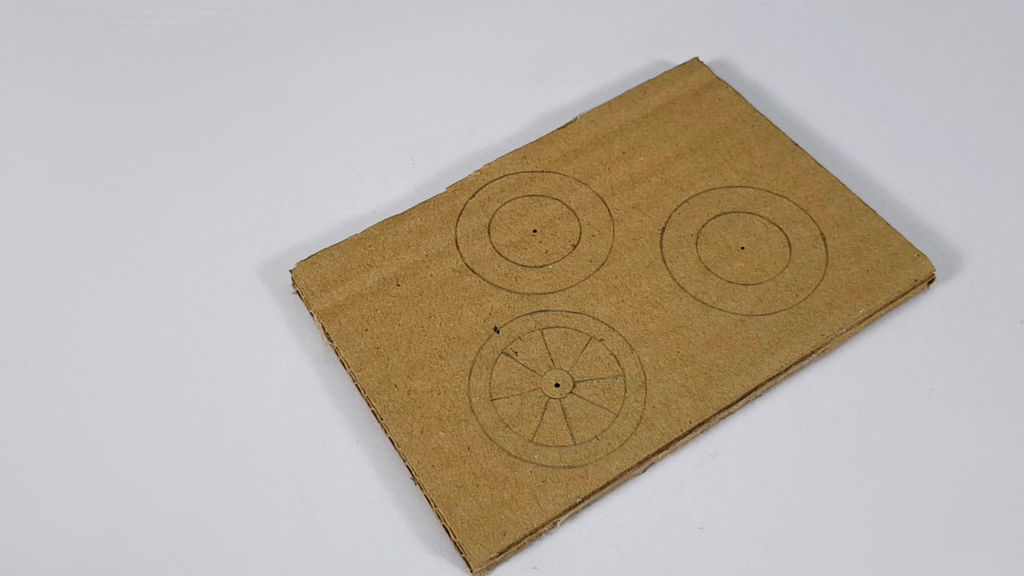




- Нарисуйте на картоне три круга примерно 4 см в диаметре.
- Поместите подшипник в центр круга и обведите вокруг него круг.
- На одном из кругов нарисуйте несколько спиц.
- Вырежьте кружочки и положите один на другой, чтобы создать толстое колесо.
- Поместите подшипник на колесо и закрепите его суперклеем.
- Сделайте два колеса с подшипниками и два без подшипников.
- Прикрепите колёса к машинке F1 и закрепите их суперклеем.
Шаг 6: Создаём электроуправление
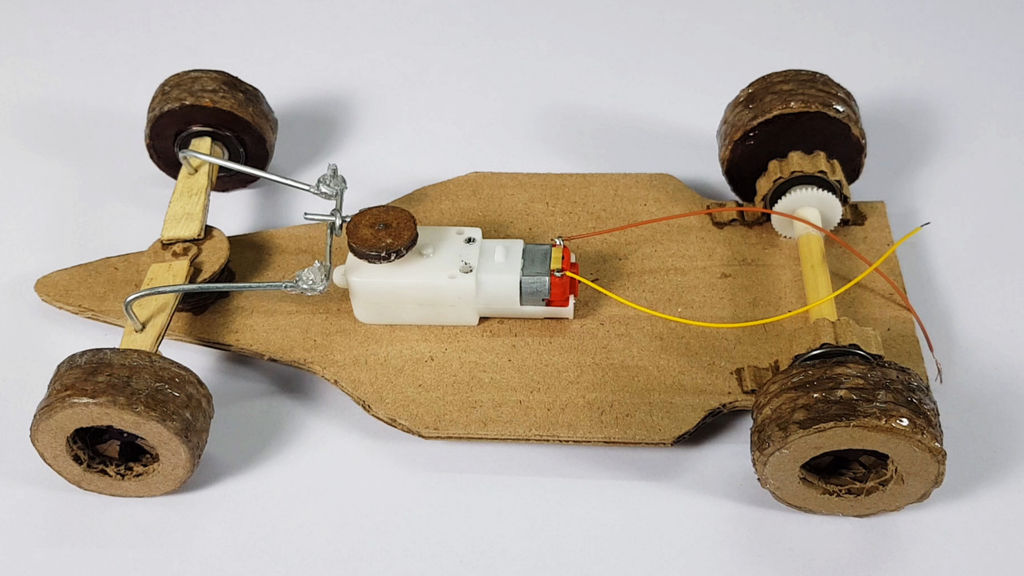
- Используя плоскогубцы, закрепите оба провода как показано на картинке.
- Возьмите моторчик с шестерёнкой и прикрепите круглую картонку на его валу.
- Положите кусок толстого провода поверх картонки.
- Добавьте горячего клея и проложите проволоку между слоями картона.
- Прикрепите мотор к рулевому механизму и протестируйте его, чтобы убедиться, что он работает хорошо.
Заметка: Невозможно с помощью слов объяснить всё правильно, так что я рекомендую посмотреть видео и избежать возможных сомнений.
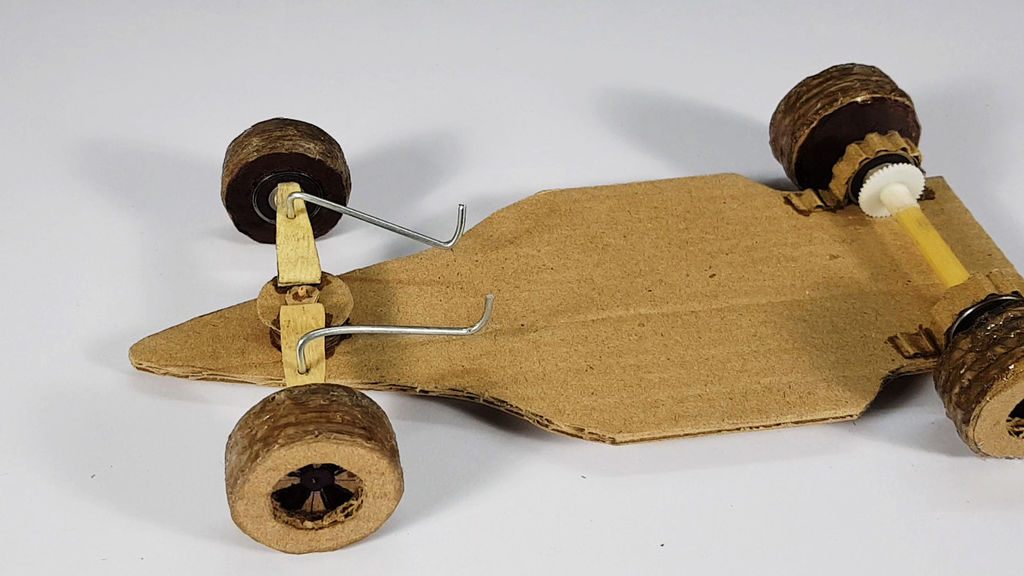
Шаг 7: Соединяем компоненты
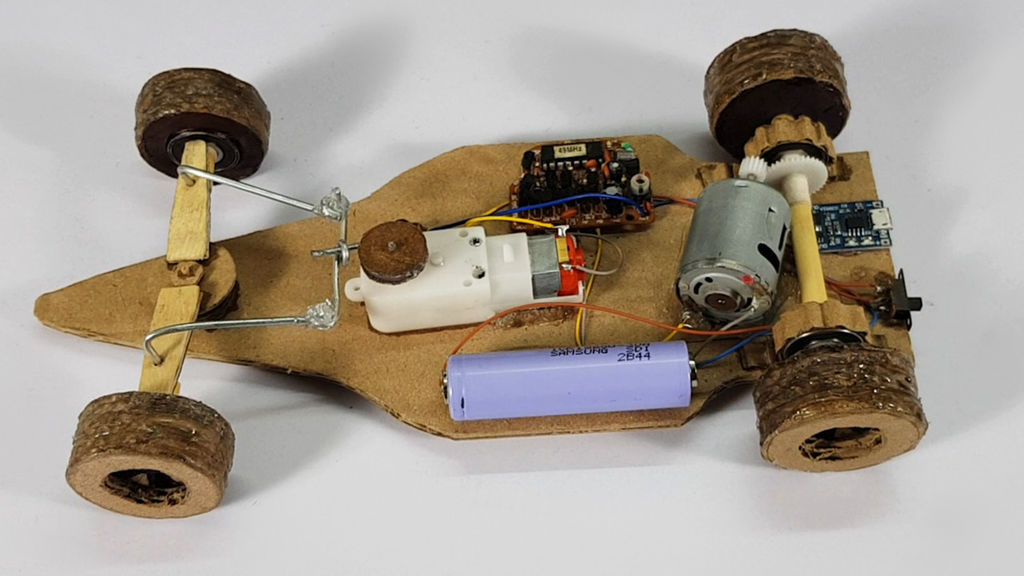
- Возьмите высокоскоростной мотор и закрепите маленькую пластиковую шестерёнку на его валу.
- Поместите моторчик на основе машинки и закрепите его горячим клеем, этот моторчик будет приводить в движение заднюю ось машинки.
- Поместите модуль TP4056 в заднюю часть машинки.
- Соедините выключатель с модулем зарядки.
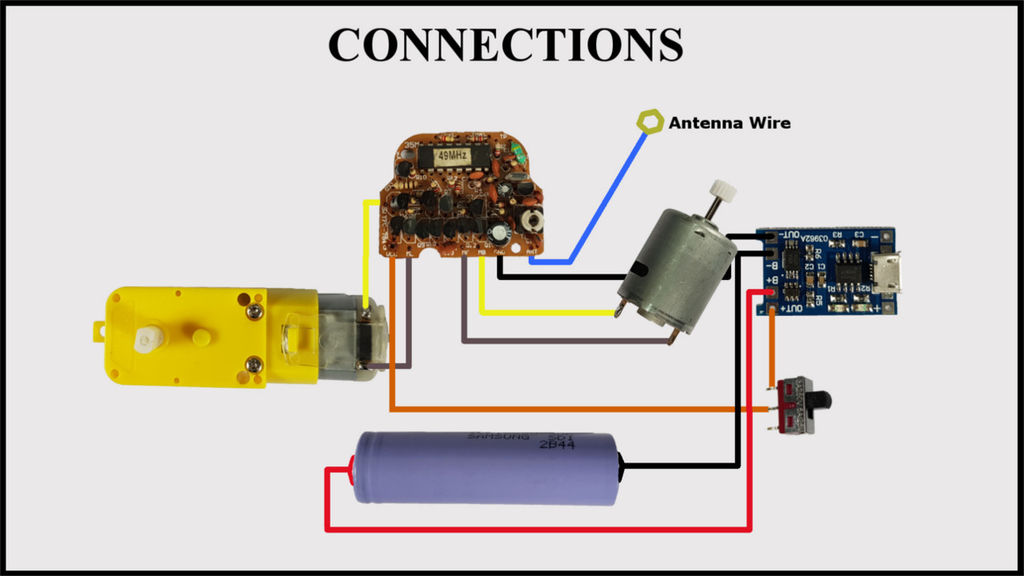
- Достаньте схему приёмника из старой сломанной радиоуправляемой машинки, или сделайте свой по одной из схем, которые можно найти в интернете.
- Ссылаясь на приложенную выше схему, соедините вместе все компоненты.
Шаг 8: Создаём элементы кузова



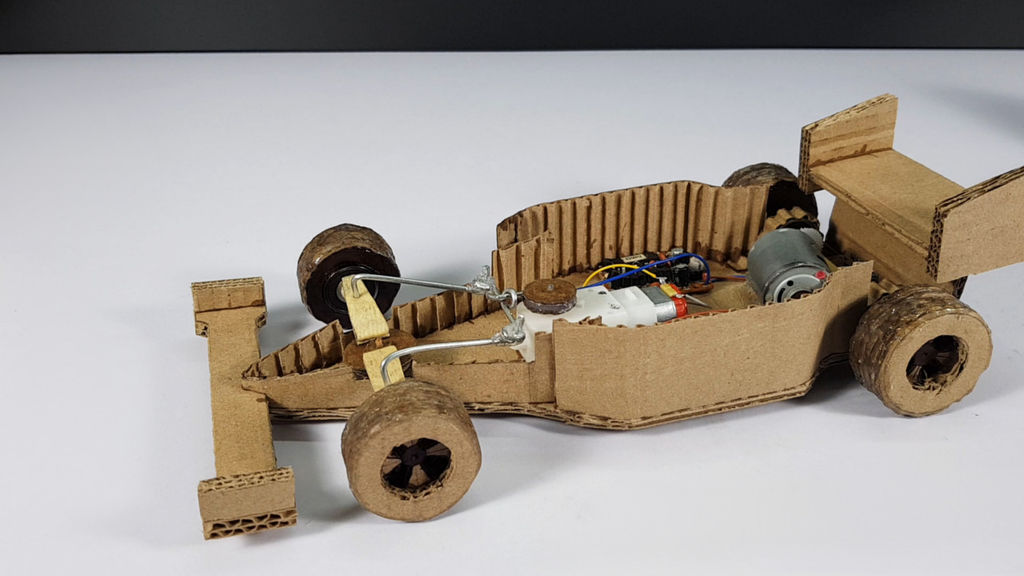
- Сделайте переднее крыло из картона и прикрепите его к кузову суперклеем.
- Таким же образом сделайте и прикрепите заднее крыло.
- Завершите создание кузова, вырезав и приклеив нужные картонные части.
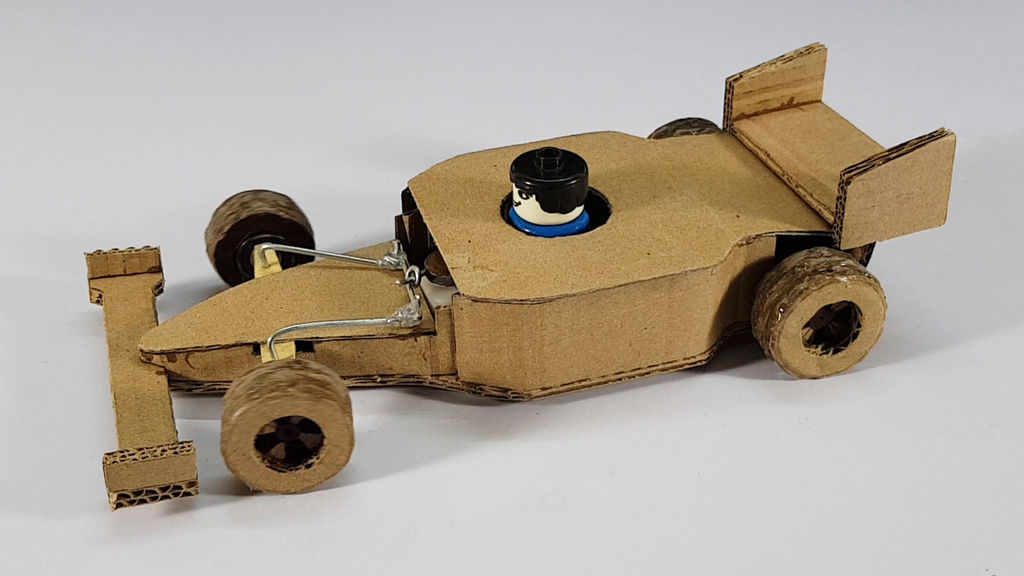
- Для изготовления кузова, ссылайтесь на приложенные картинки.
После завершения работ над кузовом, наша самодельная машинка на пульте управления готова. Подключите 5V зарядник, чтобы полностью зарядить аккумулятор. Возьмите пульт и приготовьтесь к весёлой части инструкции: видео.
Шаг 9: Дополнительно
Дополнительно можно озвучить голосом предстартовый отсчет 3-2-1-Старт и использовать его для старта гонки.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
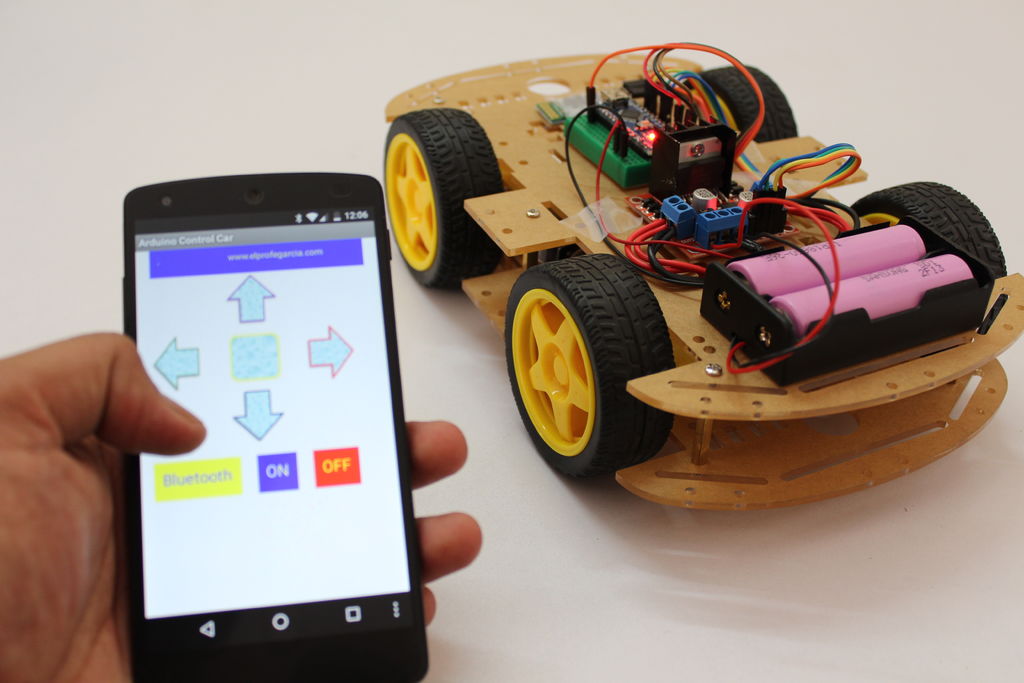
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.
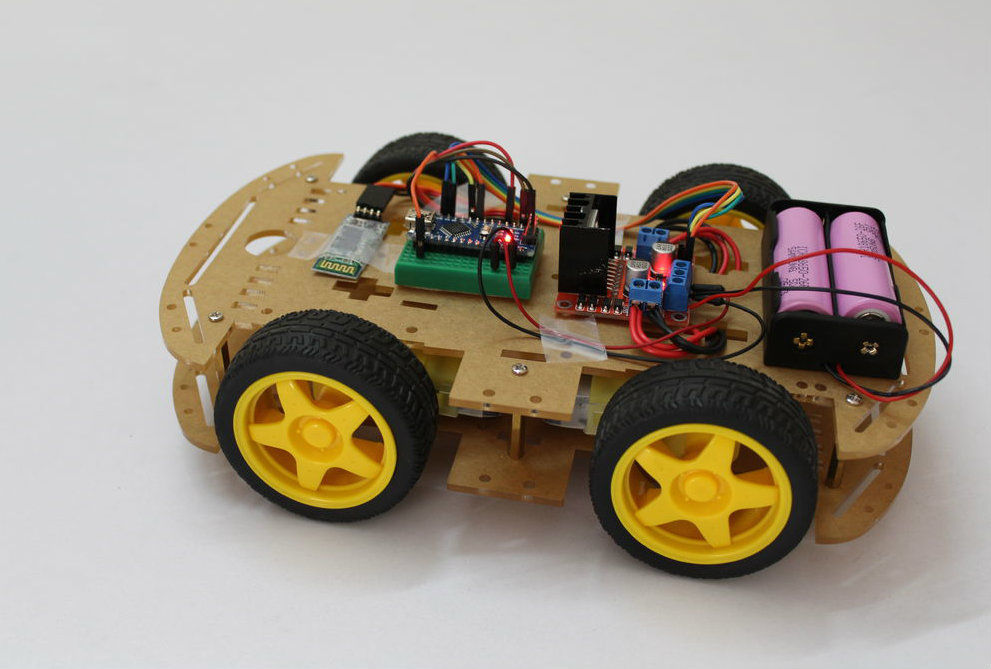

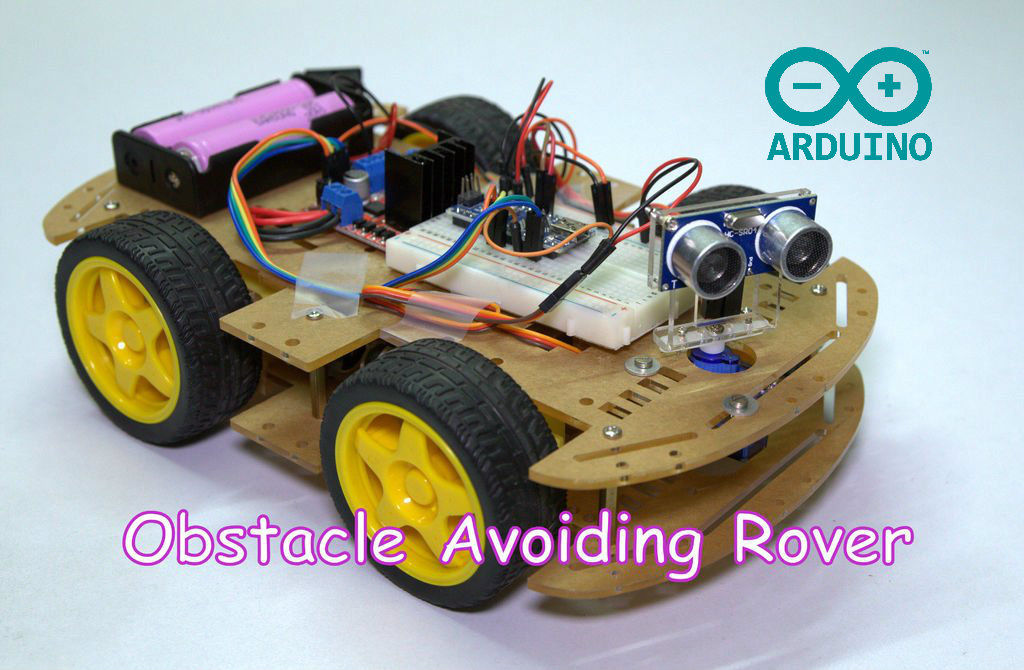
По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
Шаг 1: Нужные части и инструмент
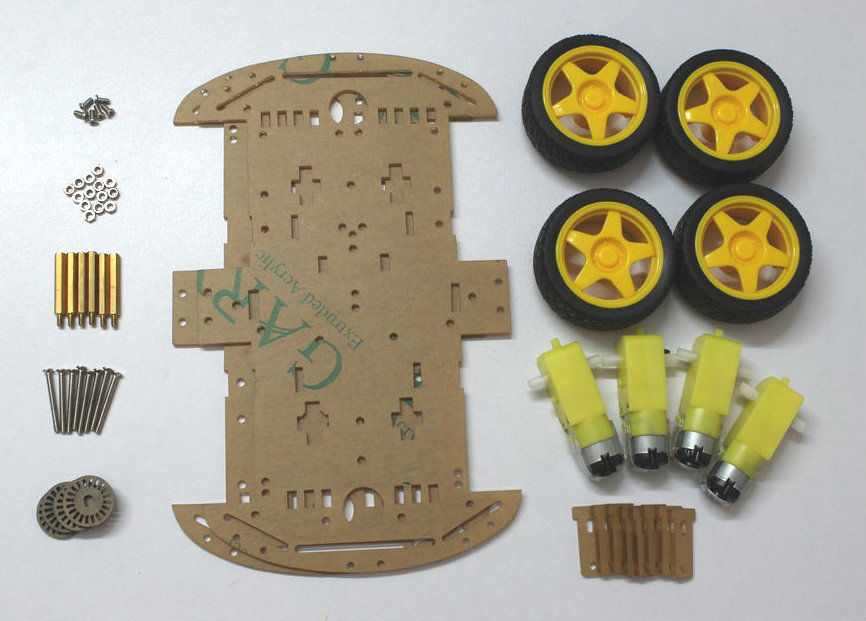
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
- Набор шасси 4WD для робота (GearBest)
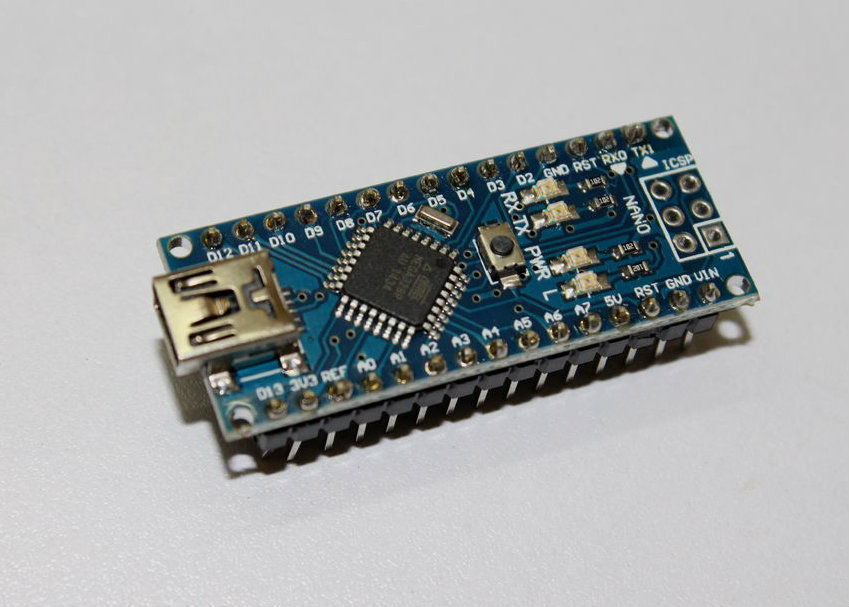
- Arduino Nano (GearBest)
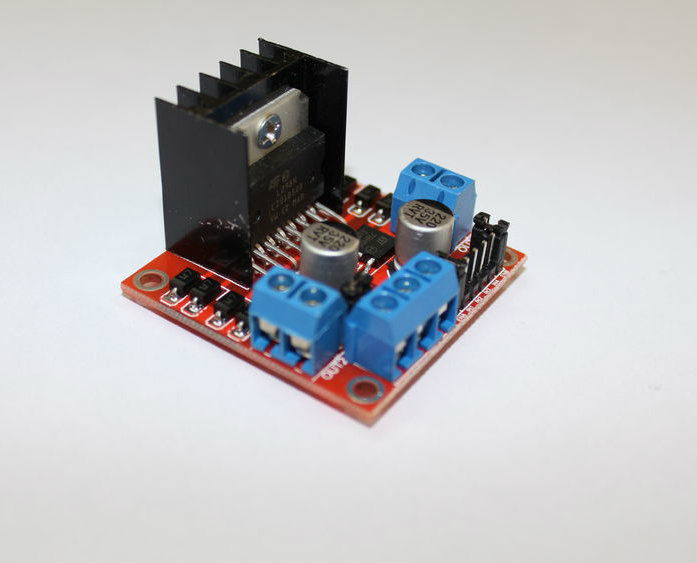
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
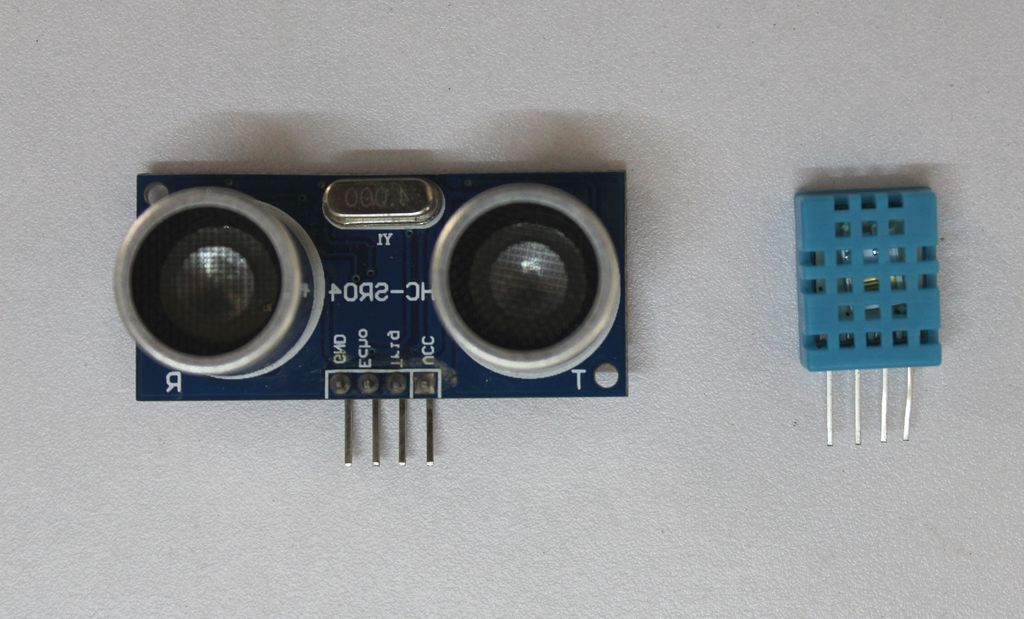
Ультразвуковой модуль измерения расстояния HC — SR04 (GearBest)
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
Шаг 3: Структура / Шасси



Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы
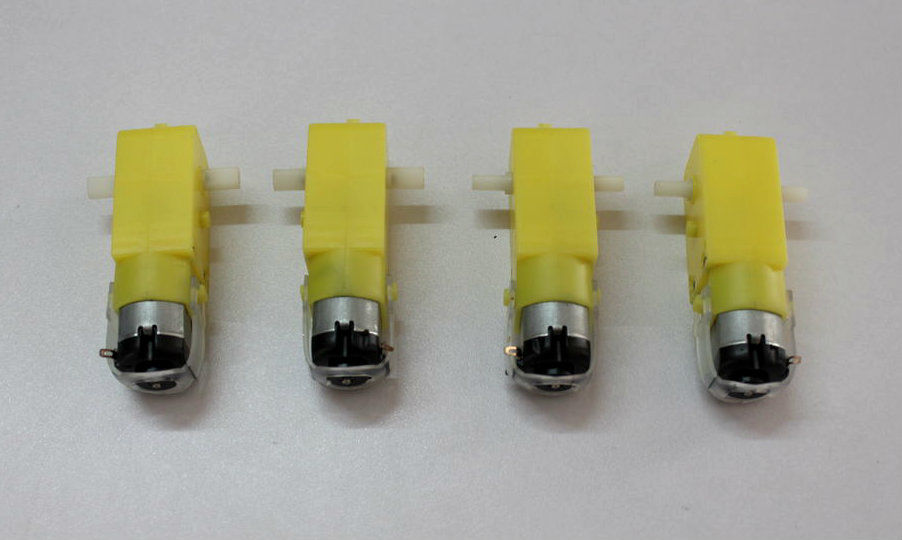

Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н•м).
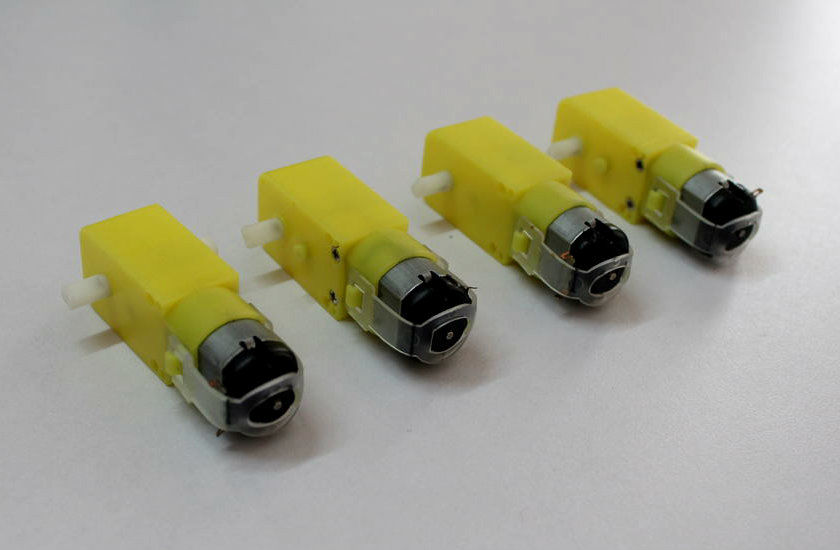
Шаг 5: Подготавливаем клеммы моторчиков
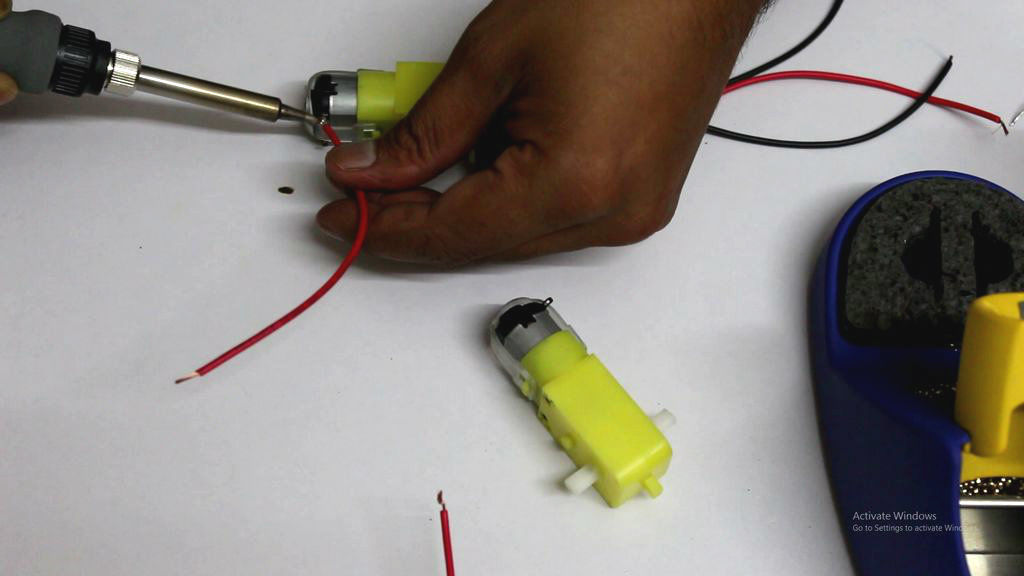

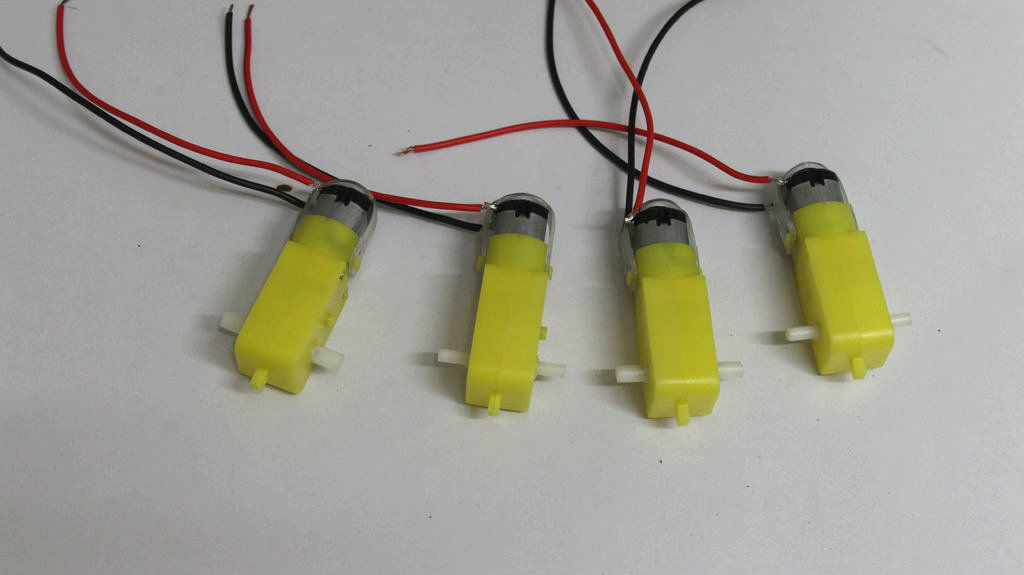
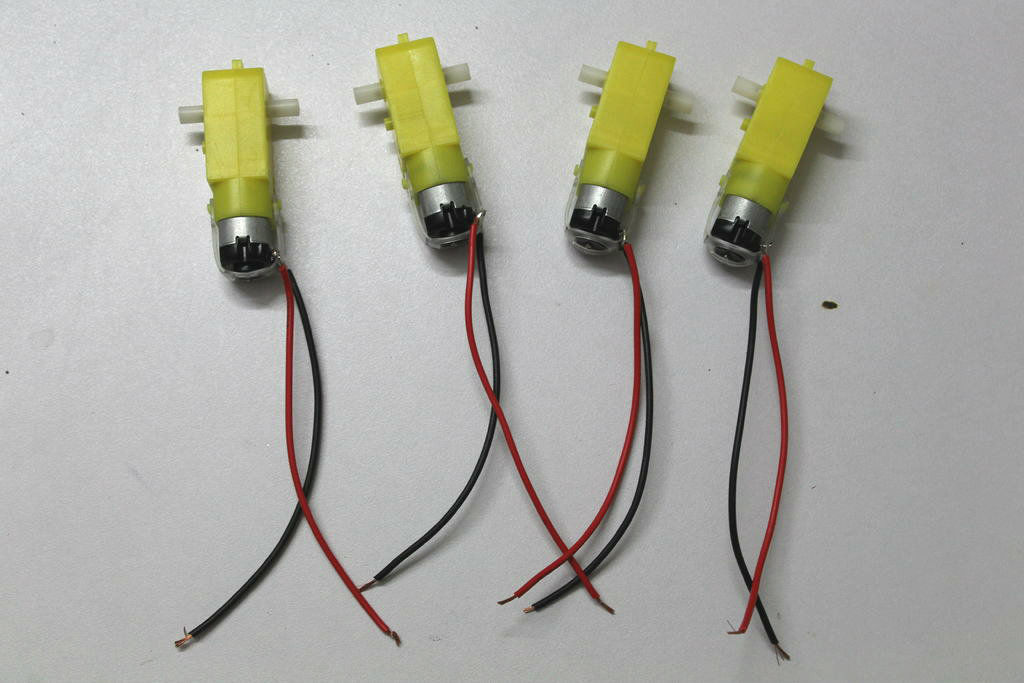
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
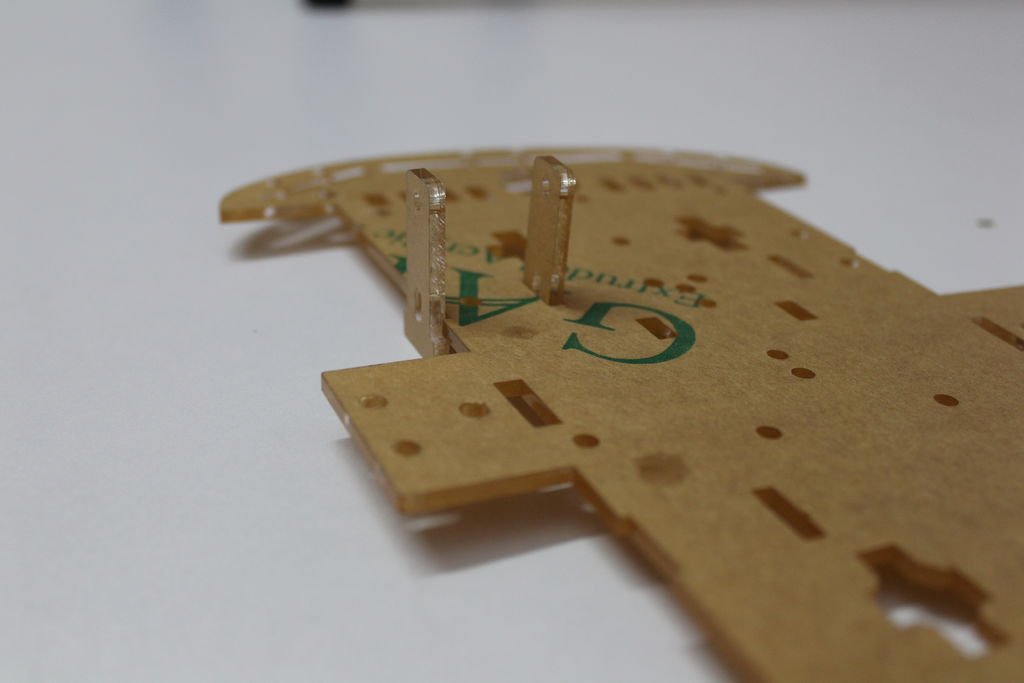
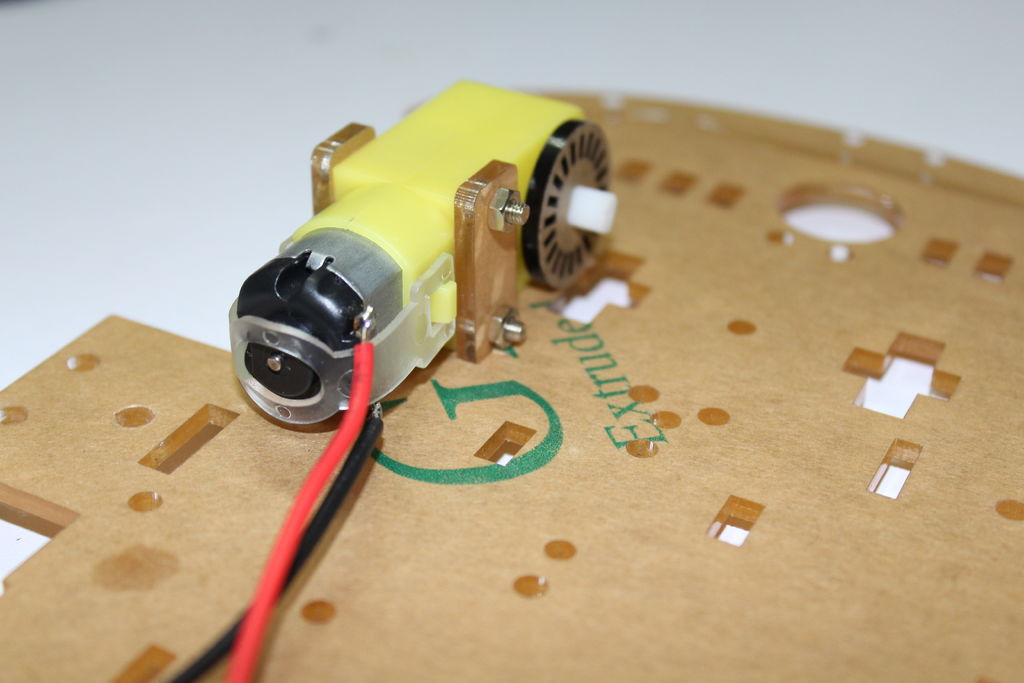
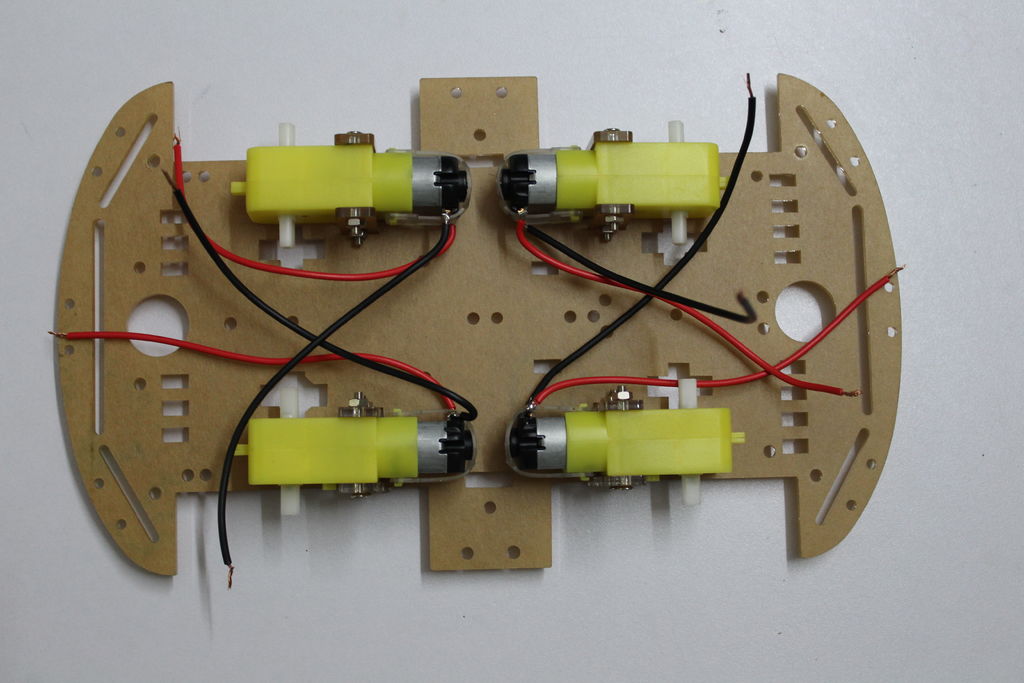
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
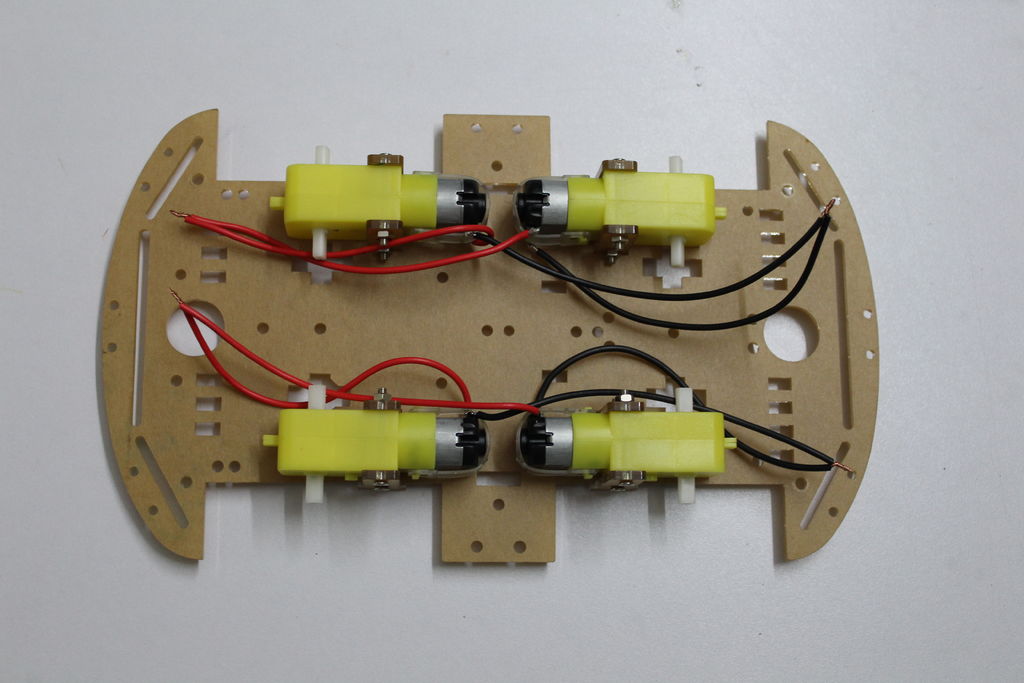
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
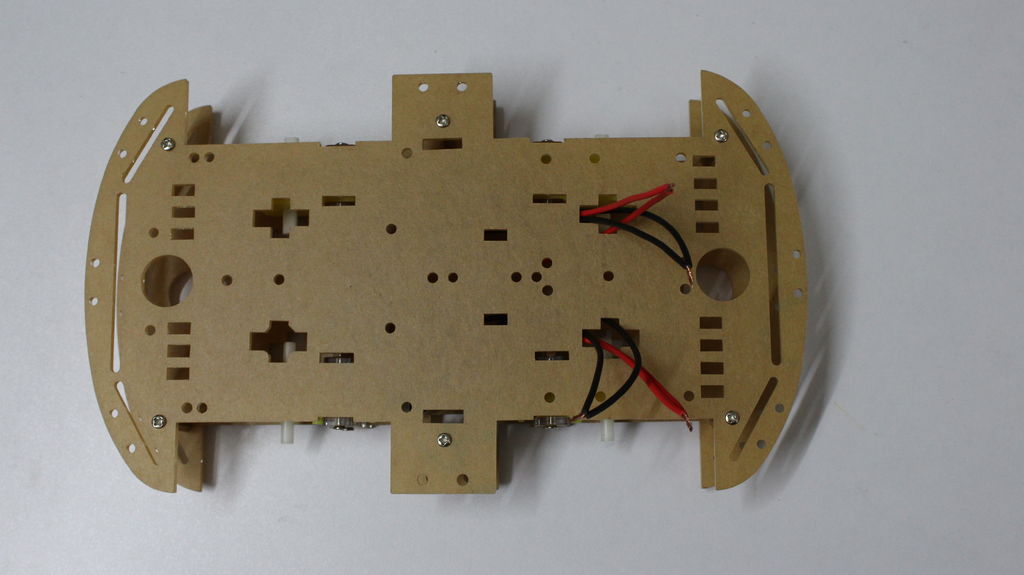
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
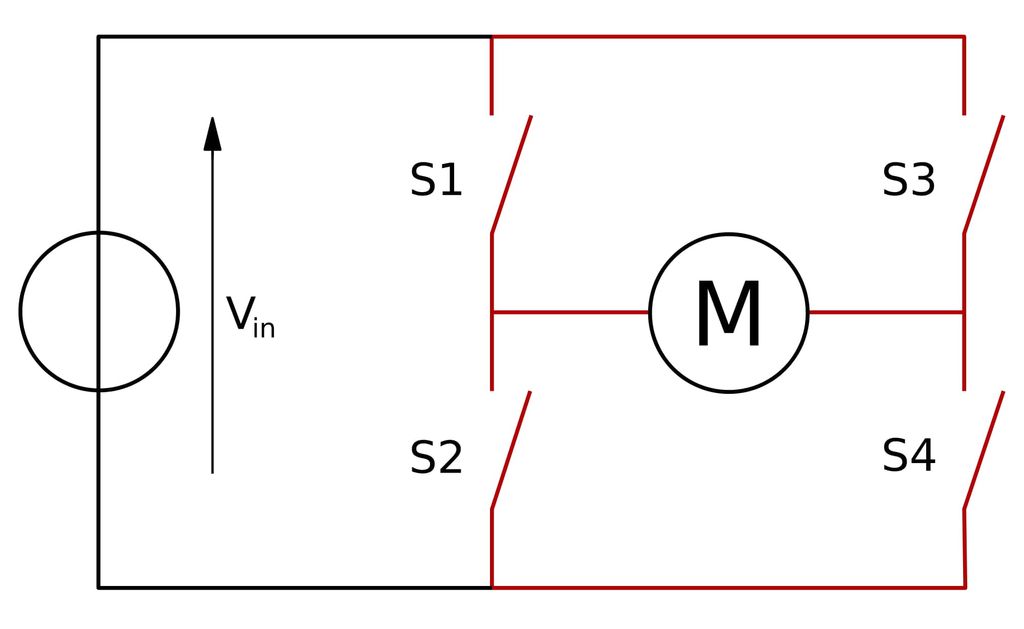
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
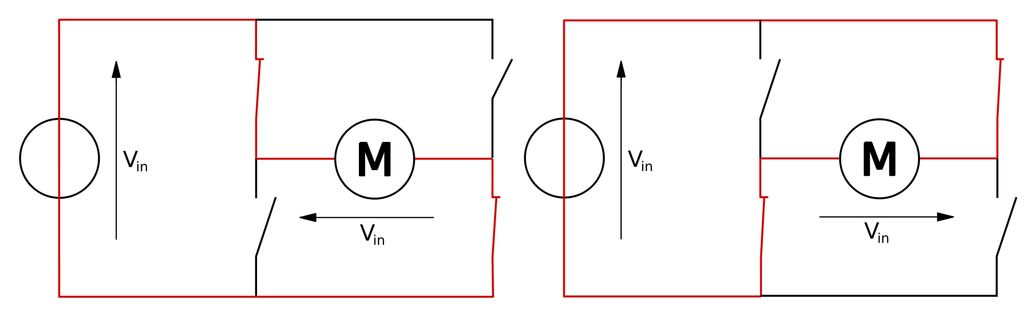
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
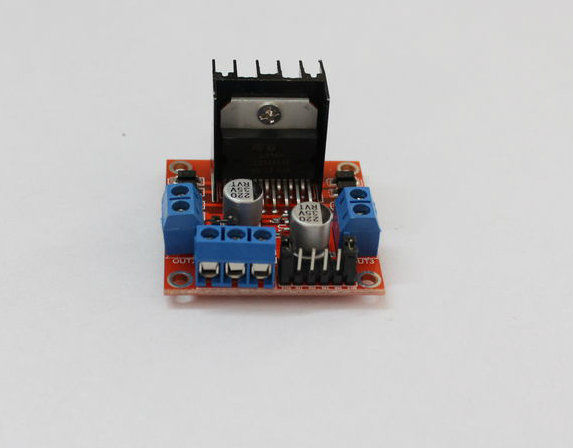
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
Out 1: DC мотор 1 «+» или шаговый двигатель A+
Out 2: DC мотор 1 «-» или шаговый двигатель A-
Out 3: DC мотор 2 «+» или шаговый двигатель B+
Out 4: вывод мотора B
12v: вход 12V, но можно использовать от 7 до 35V
GND: Земля
5v: выход 5V, если джампер 12V стоит на месте, идеально для питания Arduino (и т.п.)
EnA: позволяет получать сигналы PWM для мотора A (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
IN1: включает мотор A
IN2: включает мотор A
IN3: включает мотор B
IN4: включает мотор B
BEnB: позволяет получать сигналы PWM для мотора B (Пожалуйста, прочитайте секцию «Arduino Sketch Considerations»)
В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Шаг 11: Источник питания







Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
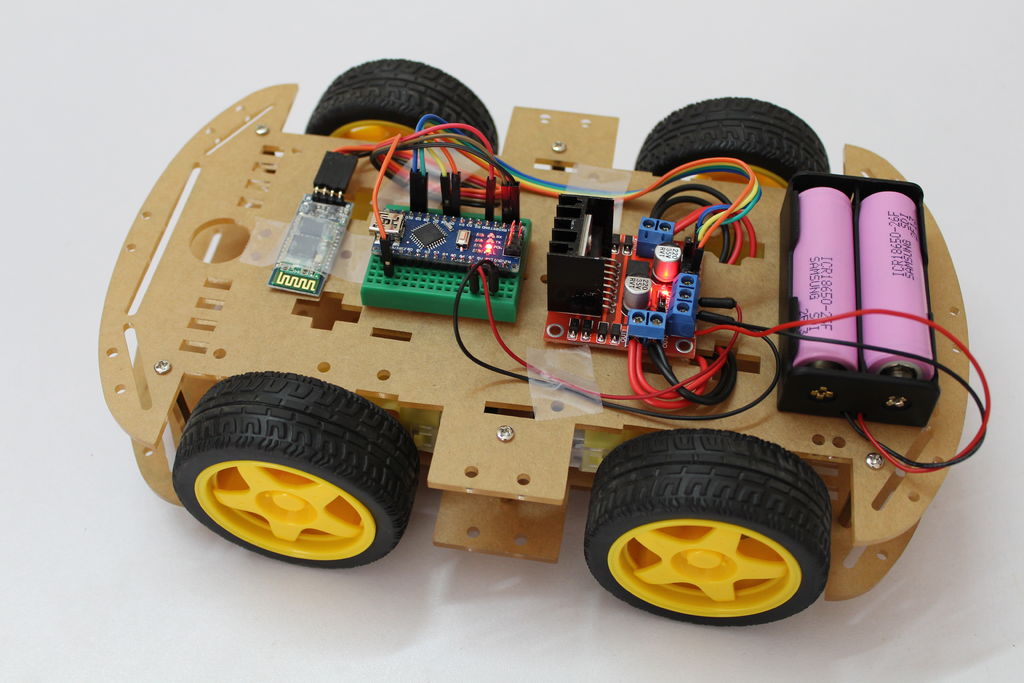
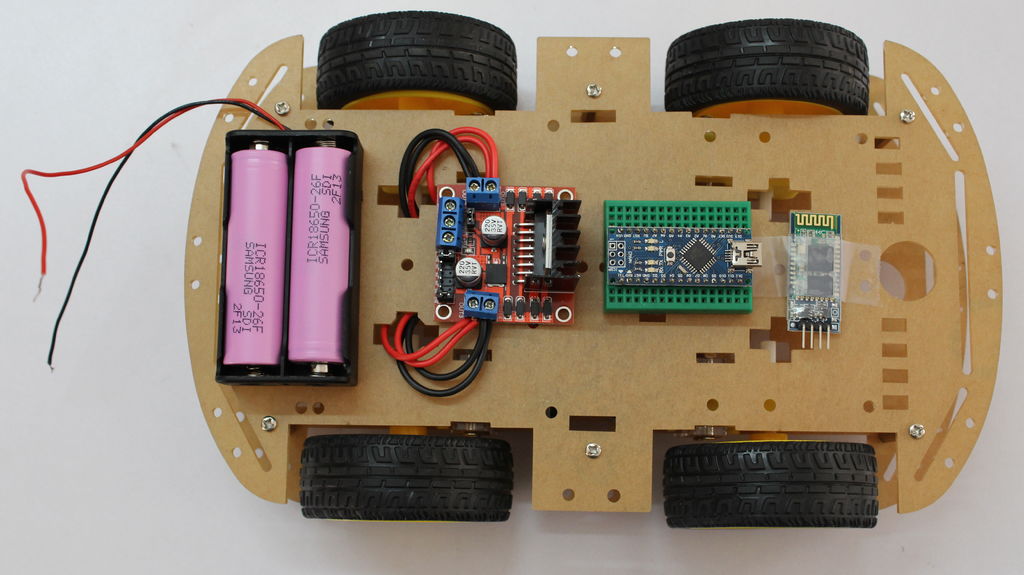
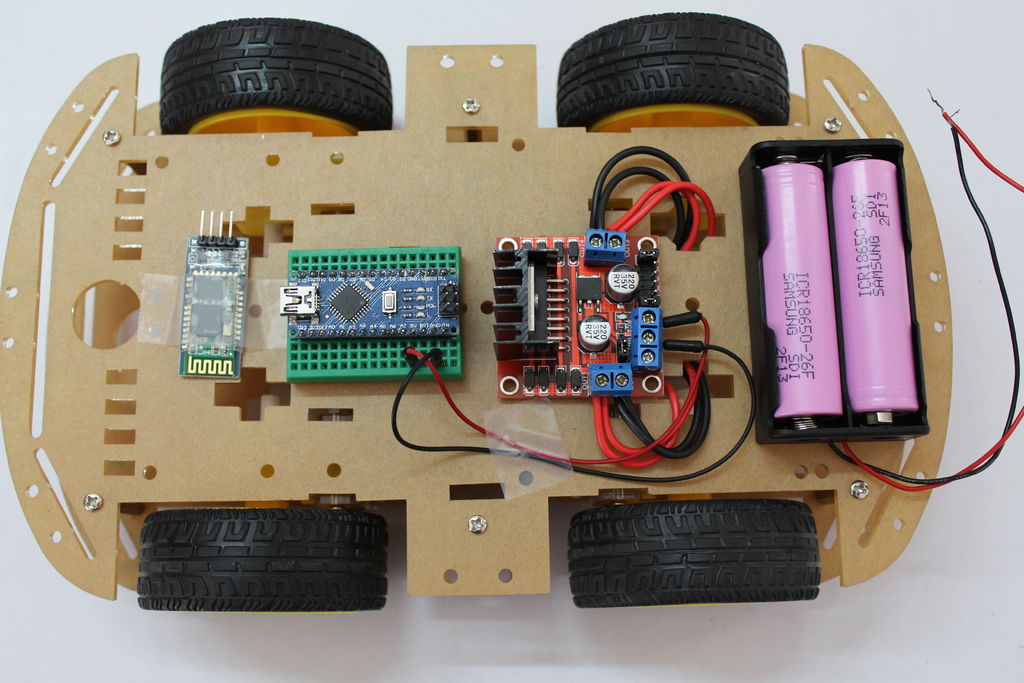
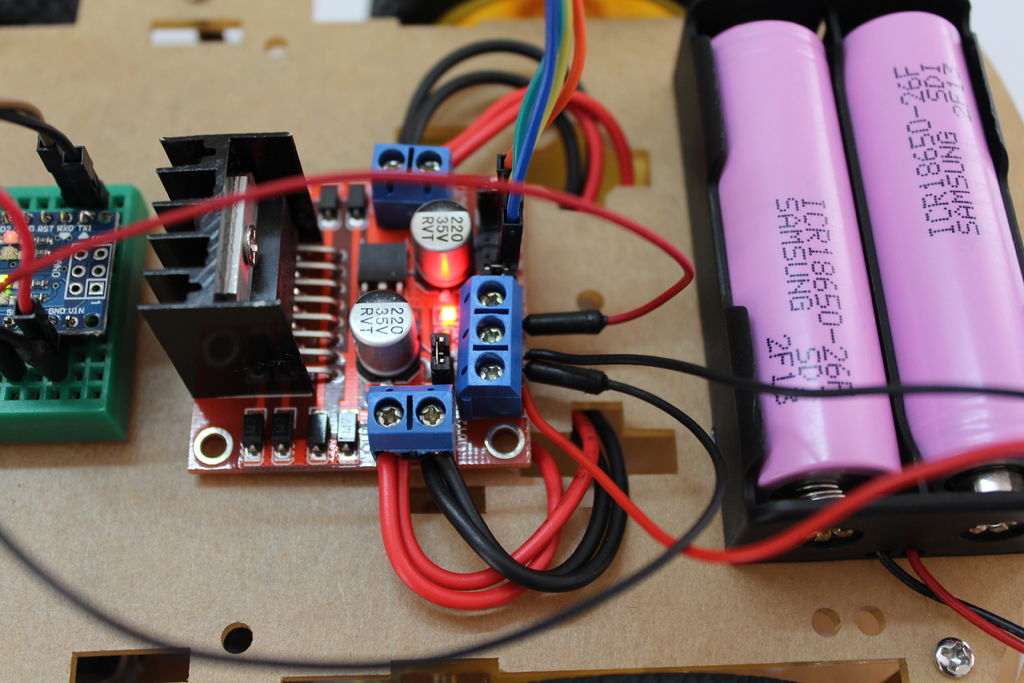
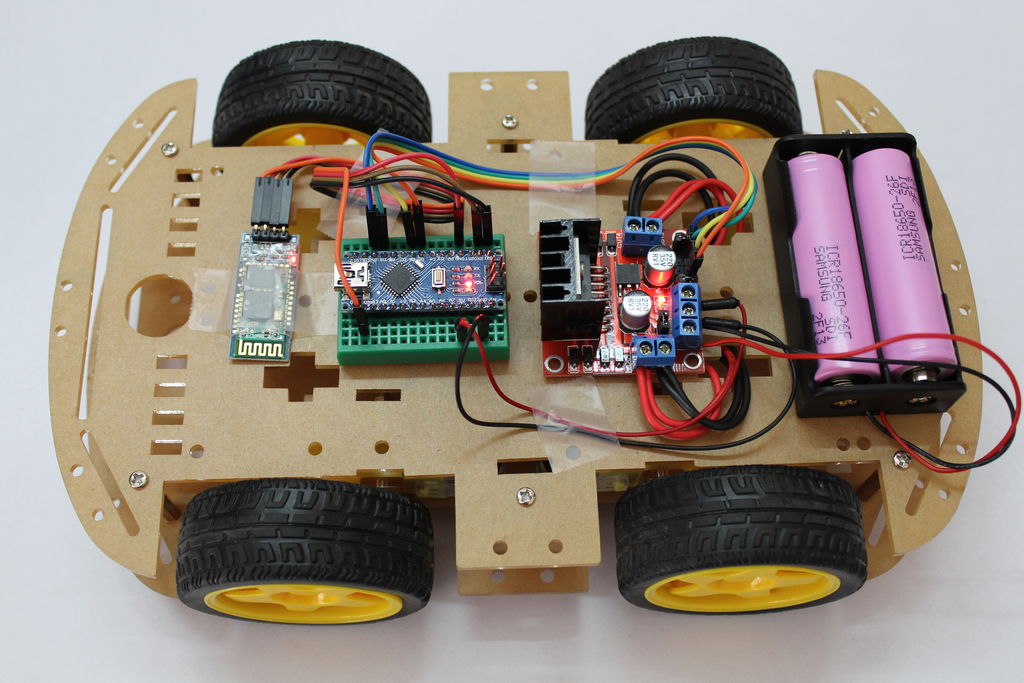
Шаг 12: Установка компонентов
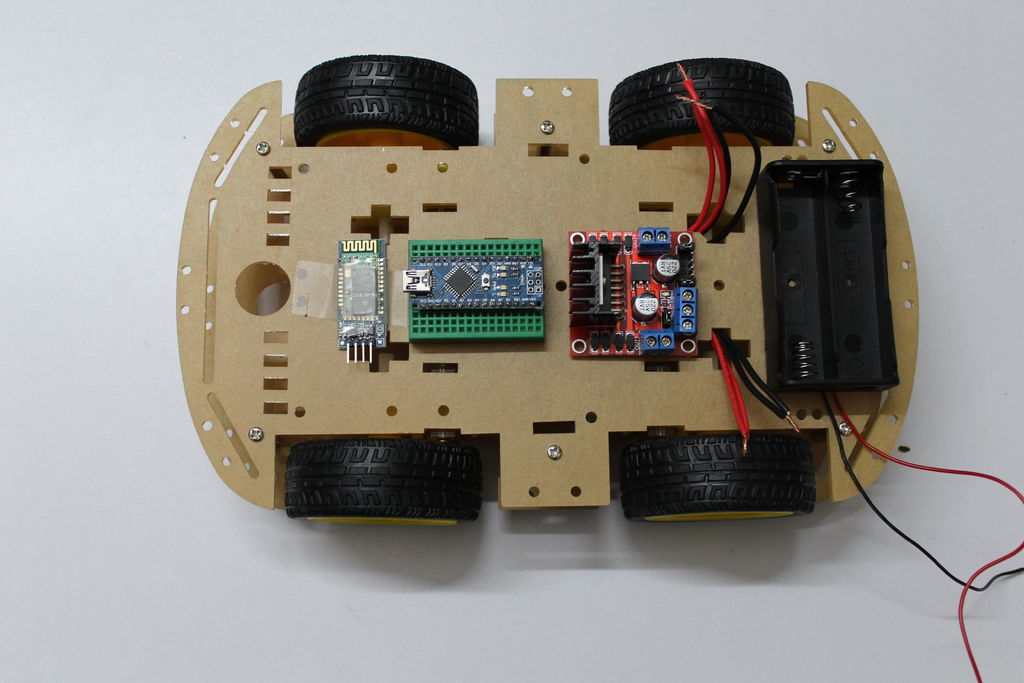
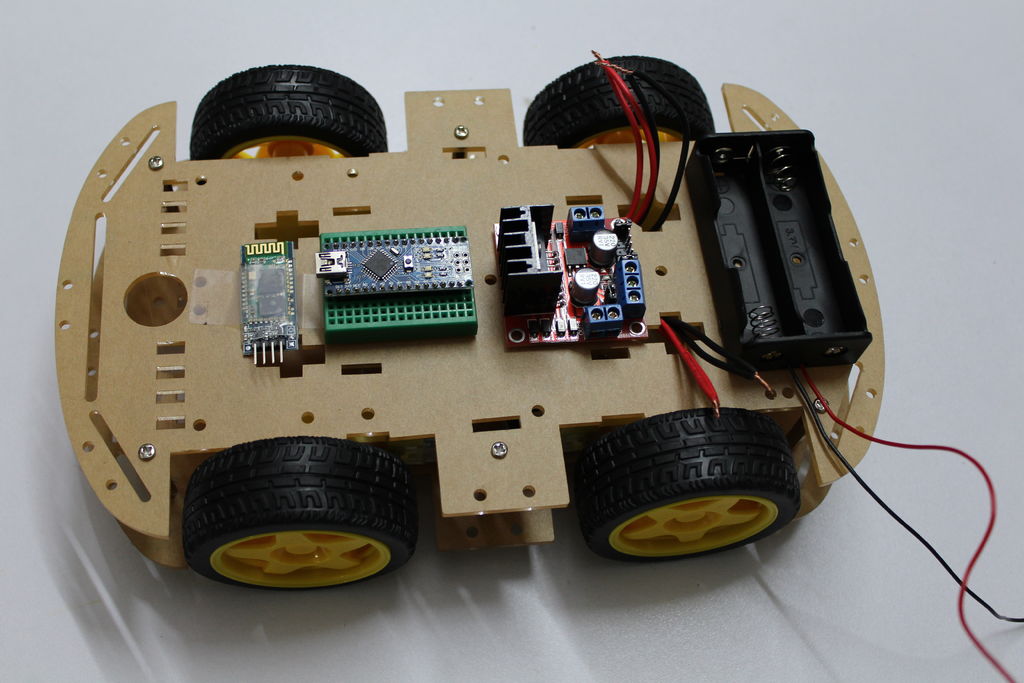
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
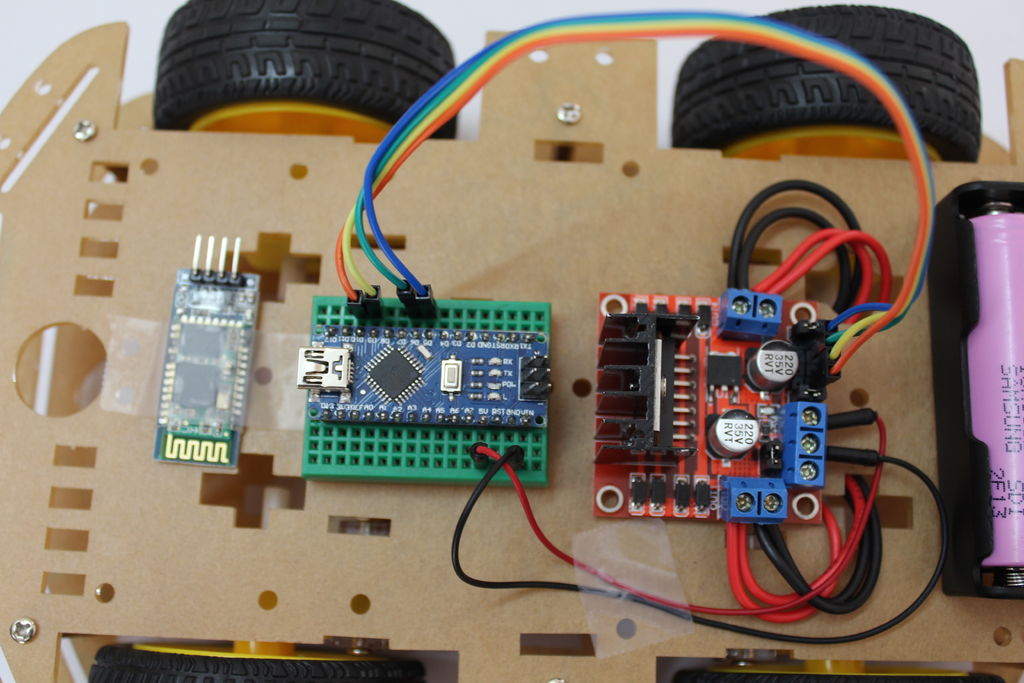
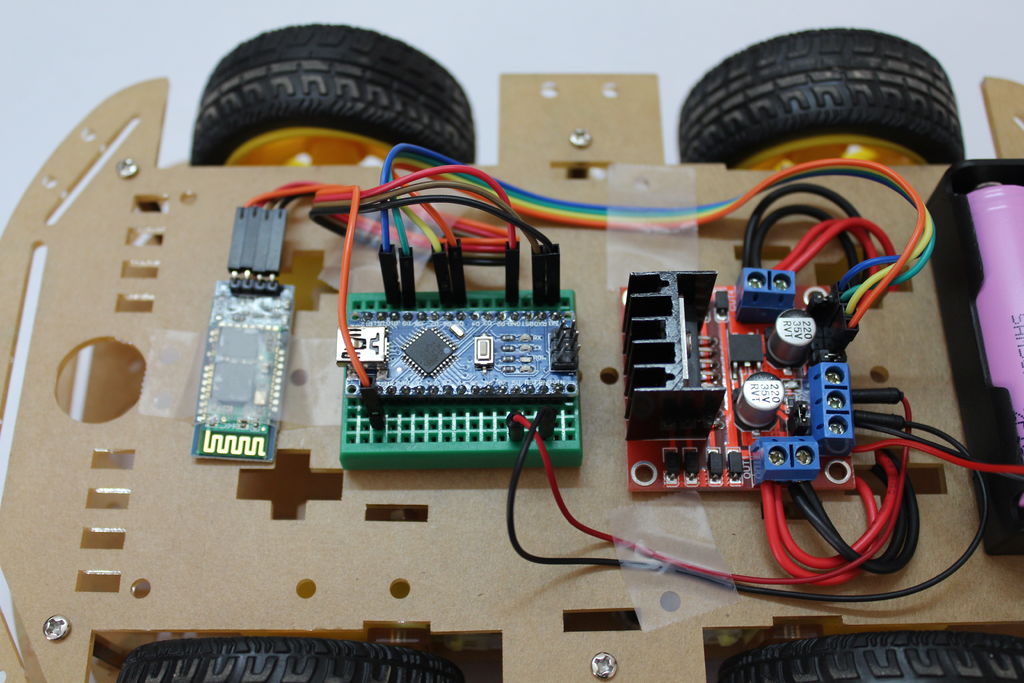
Для соединения модулей понадобятся провода с джамперами.
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Out1 -> красный провод левостороннего мотора (+ )
Out2 -> черный провод левостороннего мотора ( — )
Out3 -> красный провод правостороннего мотора ( + )
Out4 -> черный провод правостороннего мотора ( — )
LM298 — > Arduino
IN1 -> D5
IN2-> D6
IN2 ->D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx ->Rx
GND -> GND
Vcc -> 3.3V
Питание
12V — > красный провод батарей
GND -> черный провод батарей и пин GND на Arduino
5V -> соедините с пином 5V Arduino
Шаг 14: Логика управления
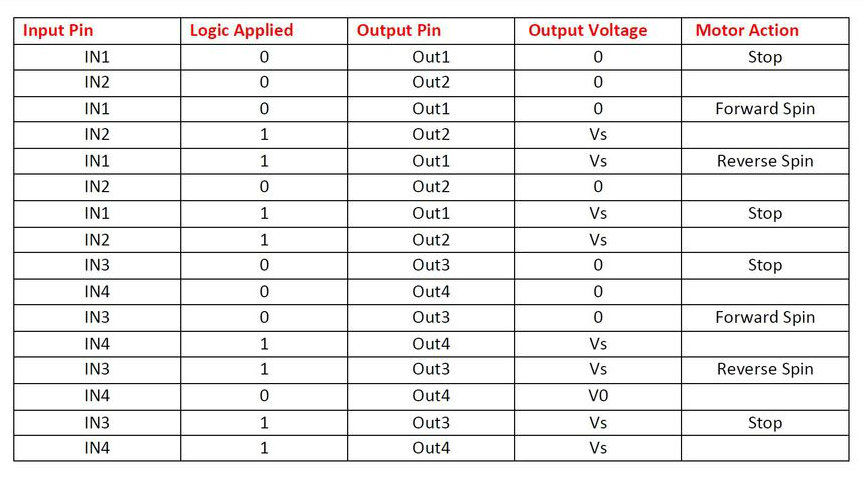
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 15: Софт
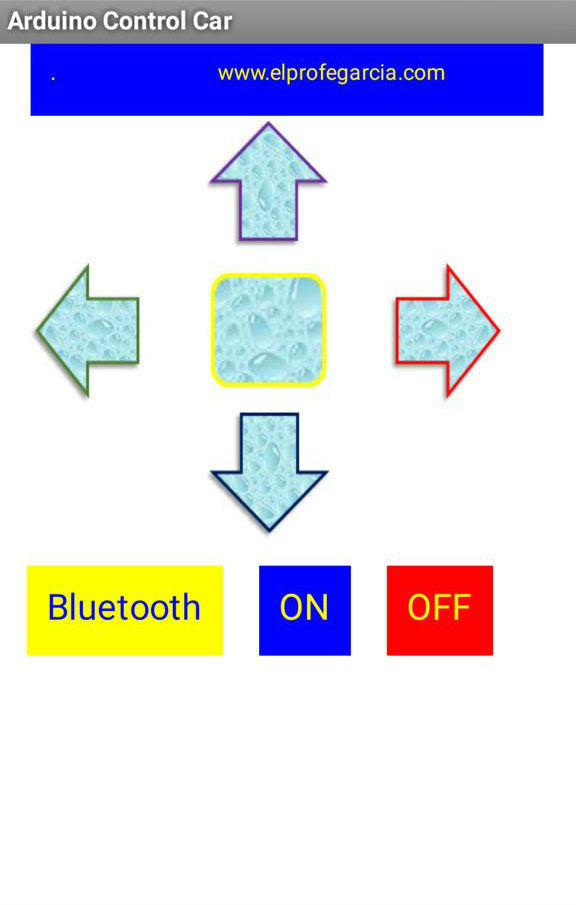
Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
Шаг 16: Тестирование


Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее

В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Читайте также: