
Как собрать игрушечного робота
Обновлено: 07.05.2024
Эта статья - продолжение ранее опубликованных, в которых я писал о курсах и занятиях ребенка, занимающегося робототехникой.
Итак, ребенок прошел ряд предварительных обязательных курсов и готов к сборке своего первого робота. Еще раз отмечу, что речь идет о детях 7-12 лет, кому интересно направление робототехники и у них есть терпение и упорство в изучении этой сложной темы.
Как это понять? - думаю не секрет, что чем легче дается цель, тем она менее ценна. Так и здесь. Если, скажем ребенку просто купили готового робота, то его интерес поддерживается в течении 1-2 дней и далее интерес быстро падает и затем эта "бесполезная" игрушка будет пылиться где-нибудь на дальней полке, в лучшем случае. В худшем, - поломанную после очередного вандализма в обращении, ее выбросят на помойку.
По этой причине, все кто у меня занимается знают что прежде чем начать собирать робота нужно хорошо поработать, сдать несколько зачетных экзаменов по разным темам и лишь после этого у него появится возможность собрать собственного робота. Иногда я слышу из общения ребят с разных курсов, как они обсуждают, кто какой проходит курс и сколько еще впереди.
"Оооо, он еще схемы из базового набора собирает. ", "я уже на макетке сборку схем прохожу", "тебе еще пол-года заниматься, прежде чем ты робота будешь собирать".
Сборка первого робота - это курс, где ребята собирают своего первого робота. Да, они покупают набор и по окончанию сборки этот робот становится их собственностью. На заре развития детской робототехники я давал возможность собирать и программировать робота от центра, но в этом случае нет ответственности в нужной мере к деталям и аккуратности в процессе сборки. Очень показательно, когда у ребенка что-то идет не так, криво собирается, пайка плохо получается, где-то коротит питание, - он понимает, что он повреждает не чью-то вещь, а уже свою и старается этого не допустить. Практически все знают, у кого какие были ошибки, будь-то "поплыл" батареечный отсек из-за того, что перепутали плюс с минусом или у кого-то упал со стола робот и откололся кусок корпуса. Порою, они по доброму тролят кого нибудь, рассказывая как Вася или Петя перепутал полюса аккумулятора и из-за этого у него робот долго вонял горелым пластиком.
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77''
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
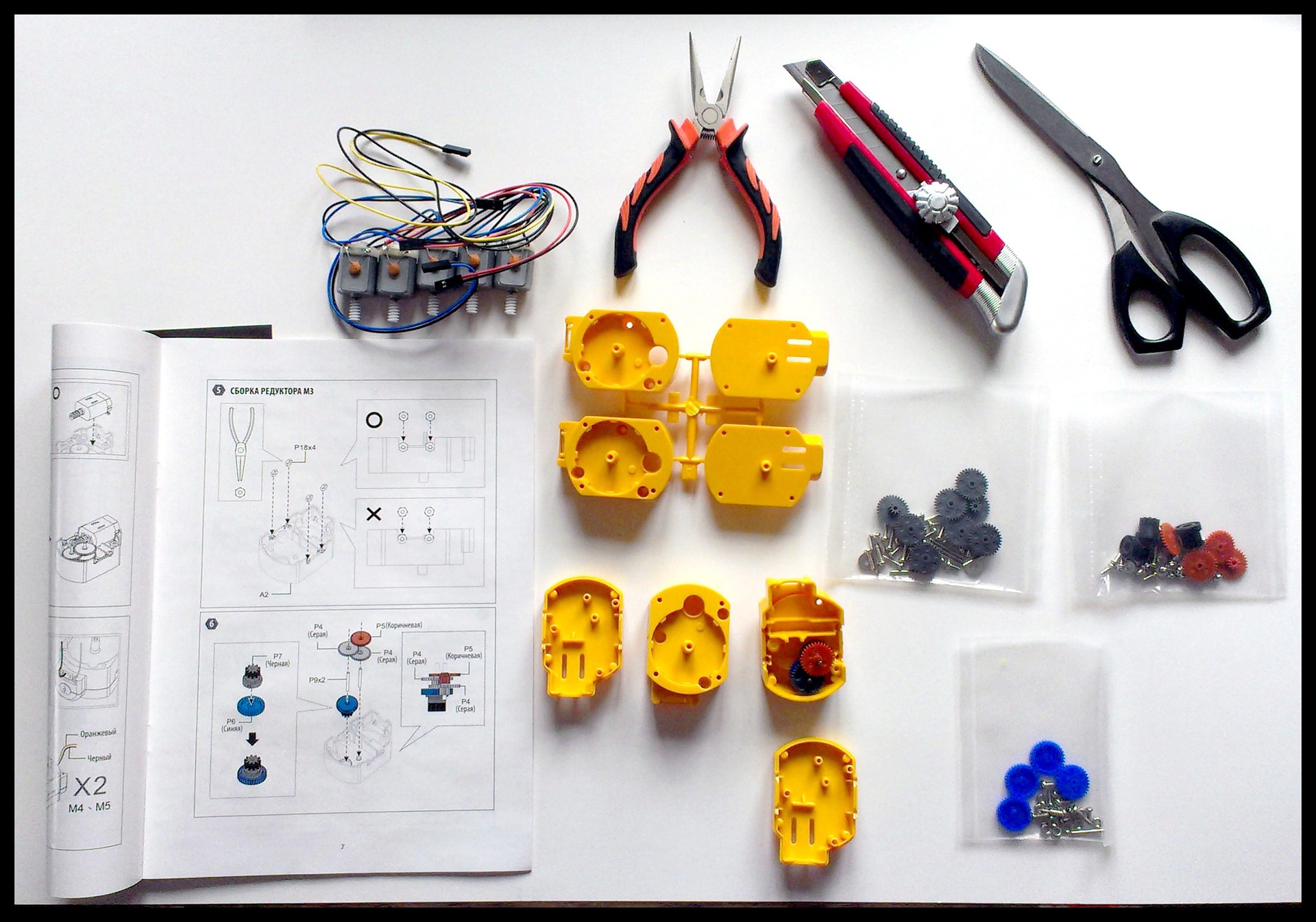
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! :)
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.

Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
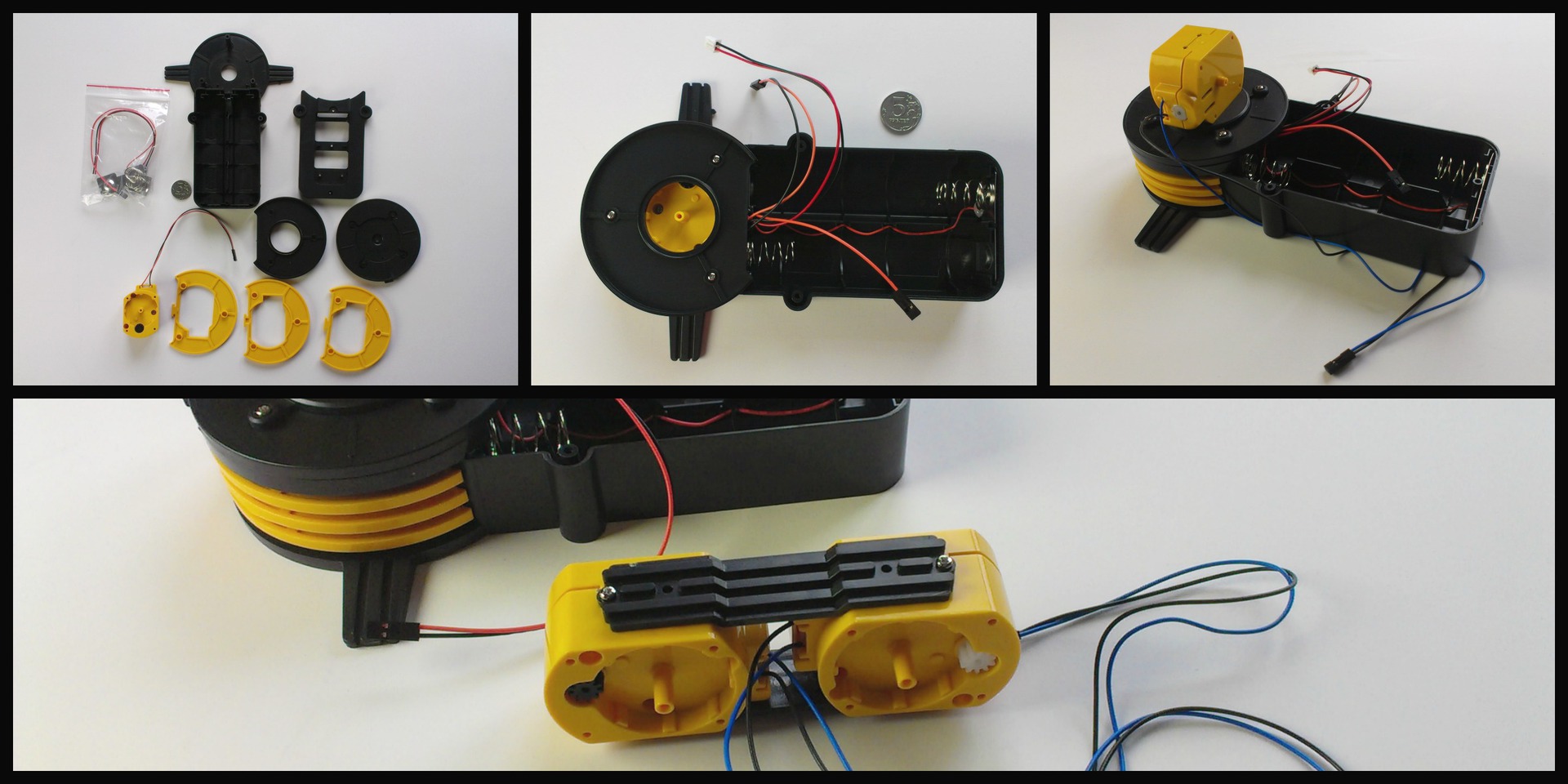
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
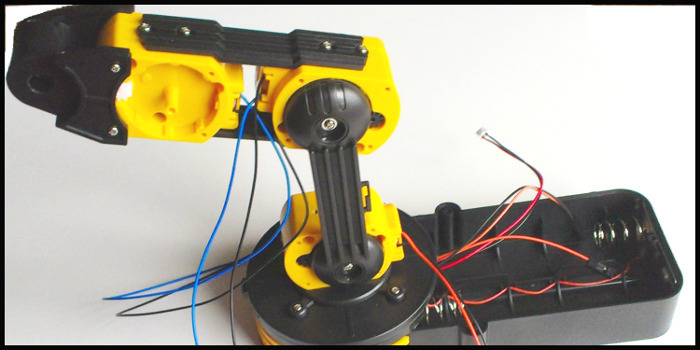
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!

Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
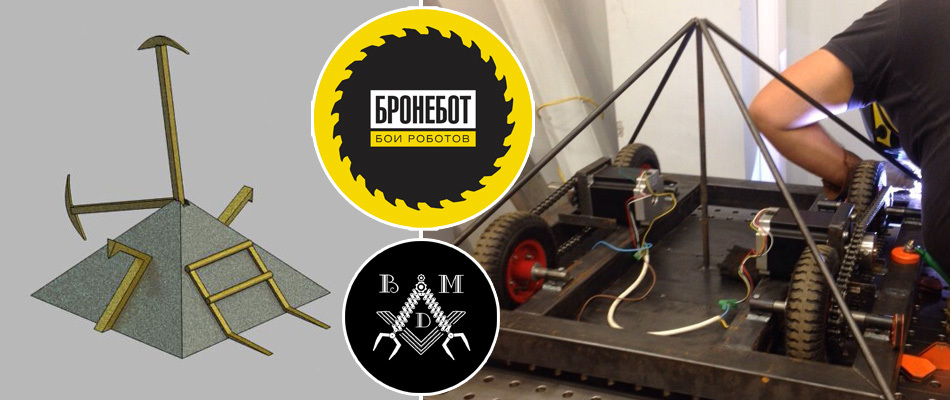
Мы с командой делаем робота для участия в Битве Роботов. Наш робот называется «Большой Брат», и он смотрит на тебя! Смотрит, настигает и разносит вдребезги. Хищный нрав и мощные кинетические орудия делают его идеальной машиной для убийства. Он уже здесь, он рядом — беги!
Это краткая история разработки боевого робота в домашних условиях. Осторожно трафик! Много изображений.

Описание конкурса
Времени очень мало, но мы стараемся изо всех сил.
Ниже представлена информация для конструкторов по созданию роботов-участников боёв Бронебот.
1. Конструкция
- Тяжелый класс: 100 кг.
- Средний класс: 50 кг.
- Легкий класс: 17 кг.
- Тяжелый класс: 1.5 х 1 метров в длину и ширину.
- Средний класс: 1 х 0.75 метров в длину и ширину.
- Легкий класс: 0.5 х 0.5 метров в длину и ширину.
- Высота не ограничена.
1.4. Роботы должны быть оснащены тумблерами ВКЛВЫКЛ в части, отдаленной от оружия, полностью отключающими питание всех подсистем робота. Если тумблеров несколько, они должны находиться рядом. Тумблеры могут быть спрятаны под оболочкой, но должны быть доступными без переворачивания робота или разборки с помощью инструментов.
1.5. Летающие роботы запрещены.
2. Электричество
2.1. Напряжение питания роботов не должно превышать 36 Вольт.
2.2. Все электрические соединения должны сделаны качественно и на должном уровне изолированы. Кабели должны быть проложены с минимальным шансом быть разорванными.
2.3. Аккумуляторы должны быть полностью изолированные и не содержать жидкостей. Соединения аккумуляторов должны быть полностью изолированными.
2.4. Двигатели внутреннего сгорания запрещены.
3. Гидравлика
3.1. Давление в гидравлических линиях не должно превышать 204 атм (3000 psi/20.4 mps).
3.2. Гидравлические жидкости должны находиться в надежных емкостях внутри робота. Все гидравлические линии должны быть проложены с минимальным шансом быть поврежденными.
4. Пневматика
4.1. Давление в пневматеческих линиях не должно превышать 68 атм (1000 psi/6.8 mps).
4.2. Пневматические емкости должны быть подлежащего качества, промышленного производства. Давление в них должно соответствовать спецификации производителя.
4.3. Пневматические емкости должны быть закреплены внутри робота и защищены от повреждений.
4.4. Газы для пневматики должны быть невоспламеняющимися или инертными, например, воздух, углекислый газ, аргон, азот.
4.5. Должна быть предусмотрена возможность спустить давление в системе без разбора конструкции.
5. Оружие
5.1. Каждый робот должен быть оснащен минимум одним активным оружием.
- Пиротехника
- Огнеметы
- Жидкости
- Едкие вещества
- Неуправляемые снаряды
- Электрошокеры
- Радиоглушители
- Тепловые пушки
- Гауссганы
- Любое оружие, использующее горящие или воспламеняющиеся газы
5.4. Вращающие диски из закаленной стали и лезвия, которые при поломке образовывают осколки, запрещены.
5.5. Длина лезвийштыков не должна превышать 20 см.
5.6. Все подвижные манипуляторы, даже не содержащие оружия, должны иметь фиксирующие крепежи. Крепежи должны быть закрытыми во всех случаях, кроме нахождения робота на арене или техобслуживании.
5.7. Все острые грани и элементы оружия должны иметь крышки или насадки. Эти элементы не учитываются при взвешивании.
6. Радиоуправление
6.1. Используемые частоты должны быть разрешены законодательством РФ.
6.2. Робот не должен обладать автономностью. Все управление должно осуществляться исключительно с пульта оператора.
6.3. Все системы роботов должны быть отключаться при потере управляющего сигнала.
6.4. Стабильность управления должна быть продемонстрирована Организаторам заранее для допуска к участию.
6.5. Для избежания конфликтов частоты между роботами участники должны иметь два набора “передатчик-приемник”, работающих на разных частотах.
Арена

Бои будут проходить на специальной пуленепробиваемой сцене 10х10 метров со скошенными углами, т.е. фактически это восьмиугольник.

Другие роботы
Большинство роботов имеют богатый опыт участия в соревнованиях, но это только делает задачу выиграть у них еще интересней.
Наша команда

- Вячеслав Голицын
- Александр Егоров
- Андрей Такташов
- Дмитрий Елисеев
- Павел Поздняков
Краткое описание робота
- Низкий центр масс
- Низкий клиренс
- Возможность повернуться в случае переворота
- Возможность опрокинуть соперника
- Геометрия корпуса как пассивная защита.
Так же из фич: Отделяемая часть робота, и пилы.
Каркас, форма, сборка
Разрезаем профиль





Колеса со строительного рынка

Двигатели
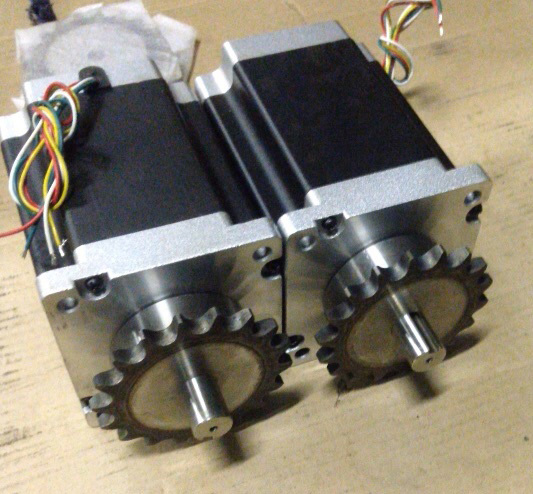
У нас была очень большая надежда на шаговые двигатели Nema 43. По заявленным характеристикам они нам подходили, мы варили под них раму. При подключении оказалось, что справится с какой-либо нагрузкой они не смогут. В срочном порядке пришлось искать другое решение. Мы нашли двигатели 36В 500Вт и уже переделали раму под них.
Радиоуправление
Обработкой ШИМ-сигнала с пульта занимается Arduino (Душа моего робота-газонокосилки). Проблема с обработкой заключалась в том, что на подсчет ШИМ-сигнала с 8 каналов уходит много времени. Выполняя это в основном цикле программы, оказывалось невозможно отправлять на драйверы двигателей адекватное количество пульсов для движения. Решением было выведение работы с шаговиками в функцию запускаемую по таймеру и изменением параметров таймера в основном цикле. Сейчас уже оказывается все это не нужно, коллекторными двигателями мы управляем через драйвер, на который будем подавать ШИМ, который смело можно изменять в основном цикле программы.

Пневмосистема
Пневмосистема в разборе:

Главной идеей было использовать для каждого двуходового цилиндра по 4 клапана, которые перекрестно соединены. Когда мы открываем клапан для наполнения цилиндра с одной стороны открываем для стравливания клапан с противоположной стороны.
Для управления клапанами решили использовать такой модуль с 8 реле, которых как раз хватает для 16 попарно-соединенных клапана, т.е. для 4 цилиндров.


Орудия
Главный молот. Над дизайном главного молота-кирки думаем и спорим.

В качестве пил мы решили использовать двигатели кошения и ножи от Robomow. Во-первых ножи сделаны из прочной стали, а двигатели дают хороший момент и количество оборотов. Во-вторых Robomow согласились нас спонсировать ими.
Материалы и инструменты для создания робота:
- 12 сервоприводов типа Tpro – SG90;
- дерево бальза Rectangle (36 x 6 x ½ дюймов), Dow (36 х 3/3 дюймов), Dow (12 x 1/8 дюймов);
- схема Arduino типа Uno;
- двигатель типа PWM – TLC5940;
- 14 резисторов номиналом 4,7К, 1,7 К, 10К Ом;
- конденсатор на 10 uF;
- разъем 538 – 42375 – 1856 (папа);
- плата типа Protoboard 589 – 8200 – 4565;
- аккумулятор 6 Вольт, емкостью 5000mAh (наличие не обязательно);
- 30осный акселерометр типа ADXL345.

Необходимые инструменты:
- сверло размером 1/8;
- нож с острым лезвием;
- термоклей и столярный клей;
- паяльник.
Вот этого набора инструментов и материалов будет достаточно, чтобы создать робота. Без доставки все элементы суммарно обойдутся не более чем в 100$.
Если есть желание сэкономить, то на робота можно не устанавливать батарею, его можно запитать через блок питания на 5-6В.
Чтобы роботу было легче поддерживать равновесие, на него устанавливают акселерометр, но здесь уже будут нужны особые навыки в плане программирования.
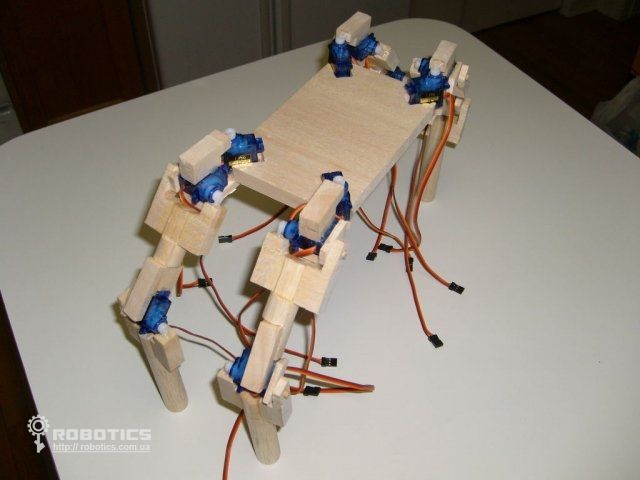
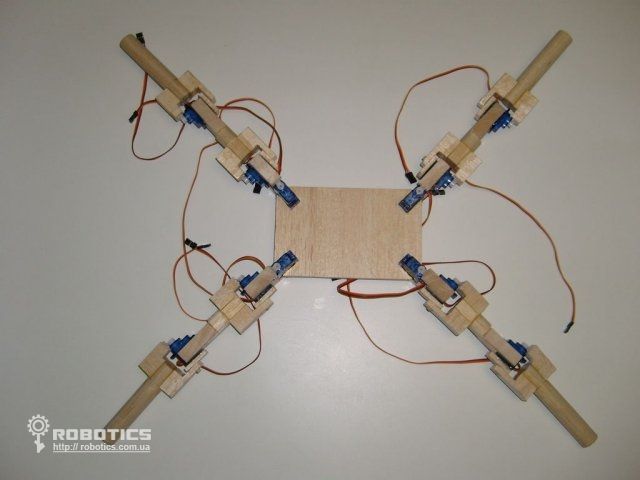
Шаг первый. Как сделать тело робота
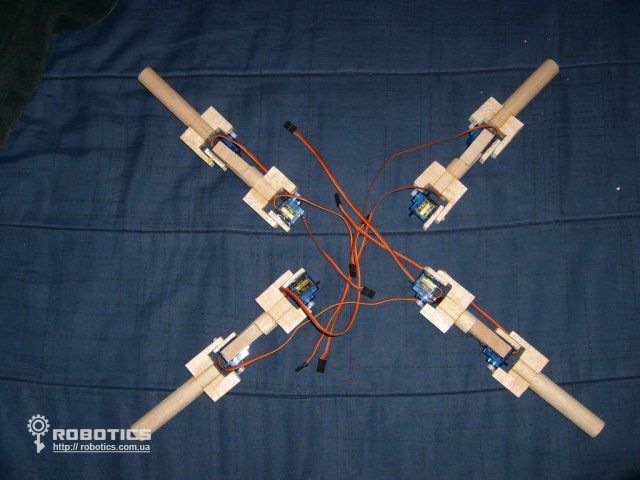
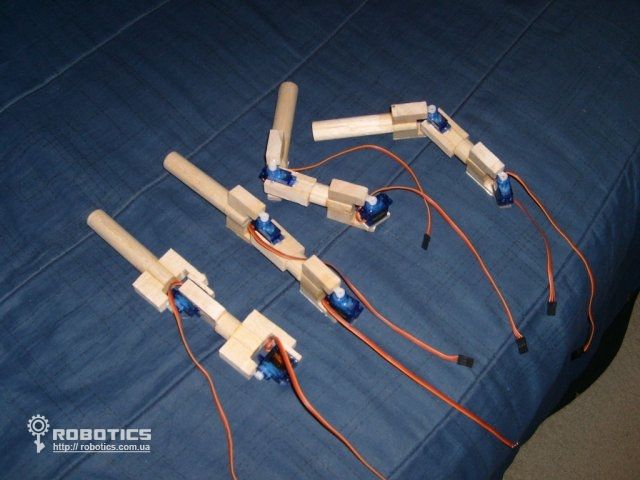
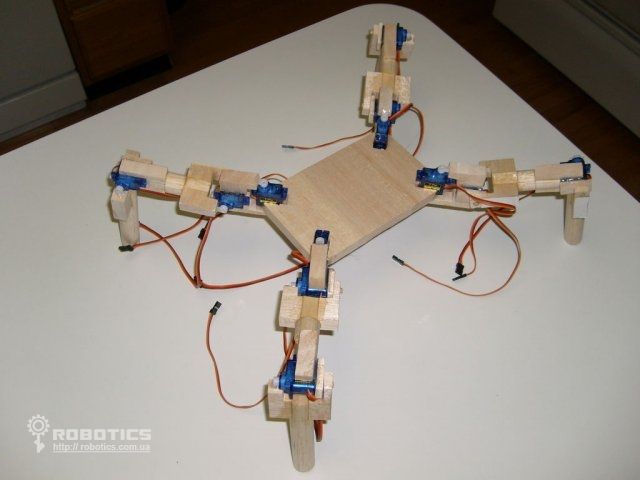
Самым сложным элементом робота является нога. Главное, сделать сперва одну, а затем сделать все четыре не составит труда.
Для работы с пробковым деревом нужен лишь один инструмент - нож. Работать лучше всего за столом, тогда получится получить более последовательные и параллельные разрезы.
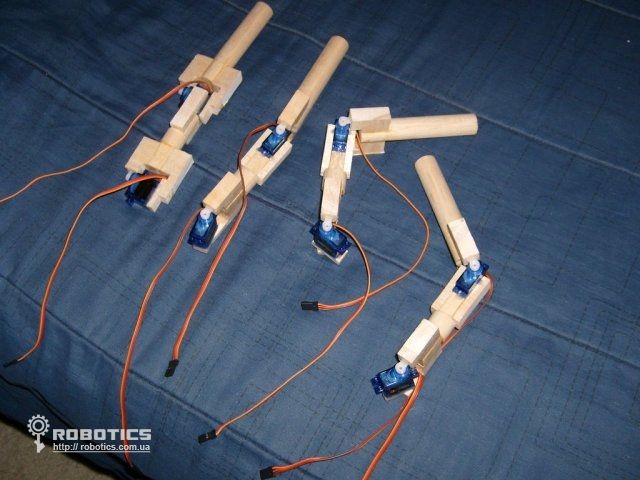
Чтобы сделать первую ногу робота, нужно посмотреть, как она должна выглядеть. Для этого автор прилагает фото с различными вариантами изготовления ног робота. Особое внимание при изготовлении ног нужно уделить точкам опоры.
Еще на рисунках можно увидеть контакты сервоприводов. Они нужны для того, чтобы укрепить ноги и снизить нагрузку на валы серводвигателей.
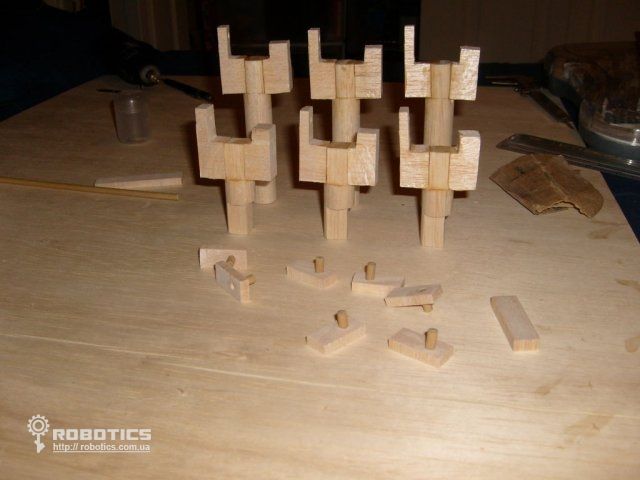
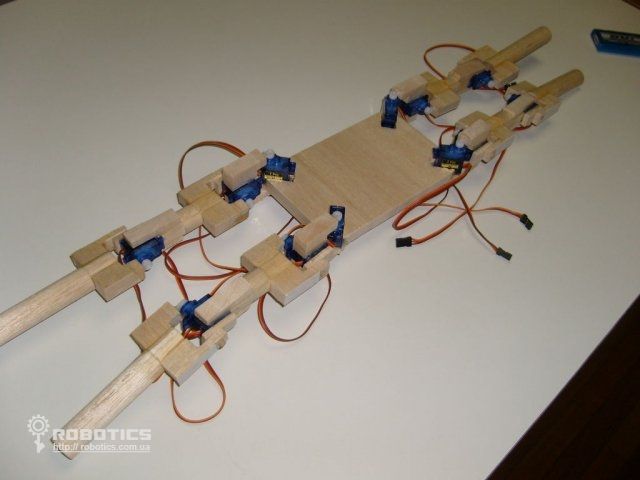
Если говорить о животе робота, то это прямоугольник, который имеет выемки по краям для установки сервоприводов.
Для склеивания бальзы лучше всего использовать столярный клей, он обеспечивает надежную прочность соединения. Еще столярный клей можно нанести на внешнюю часть древесины, чтобы сделать материал прочнее.
Чтобы прикрепить сервопривод к дереву используется горячий клей. Но практика показывает, что такое соединение может быть не надежным, поэтому здесь желательно подумать и каким-то иным образом фиксировать сервопривод.
Особенность предложенного проекта робота в том, что ноги могут выгибаться на 180 градусов, благодаря этому робот может ходить вверх ногами.
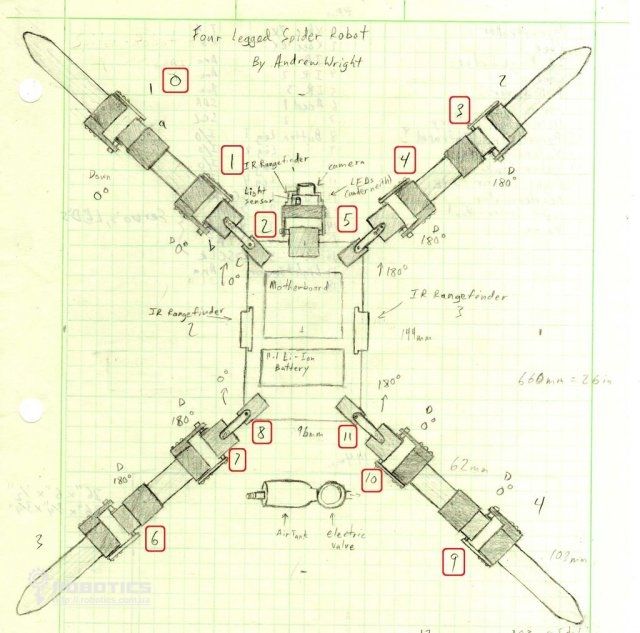



Шаг второй. Как устроена электронная часть робота
Изначально схема имела огромный функционал, но проще она была упрощена и теперь перед ней стоит лишь одна задача - заставить робота шагать. Если в бюджете имеется некий запас средств, систему можно добавить акселерометром. Здесь он будет являть отличным дополнением.
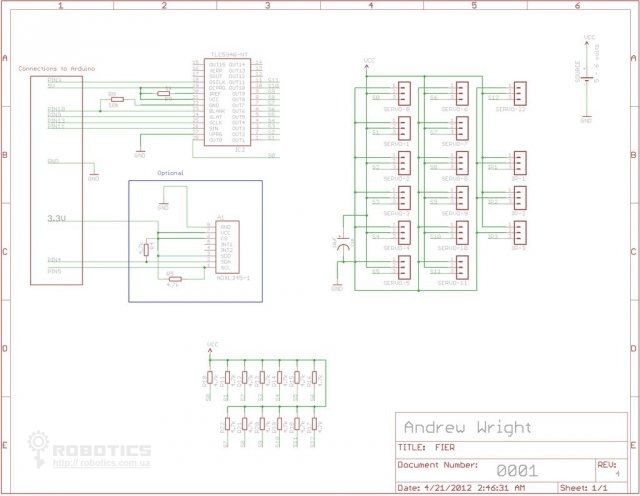
Если взглянуть на схему, то можно увидеть источник питания на 5-6 Вольт. Это основной источник питания для робота, этого вполне хватает для его нормальной работы. Для питания сервоприводов не нужно использовать источник питания от Arduino. Нужно использовать источник питания Arduino только для питания мотора PWM.
Для размещения всех элементов лучше всего создать печатную плату. Не лишним здесь будет передатчик PCB Advanced Circuits, так как проект часто преподносят в виде примера в школах.
Шаг третий. Программный код робота
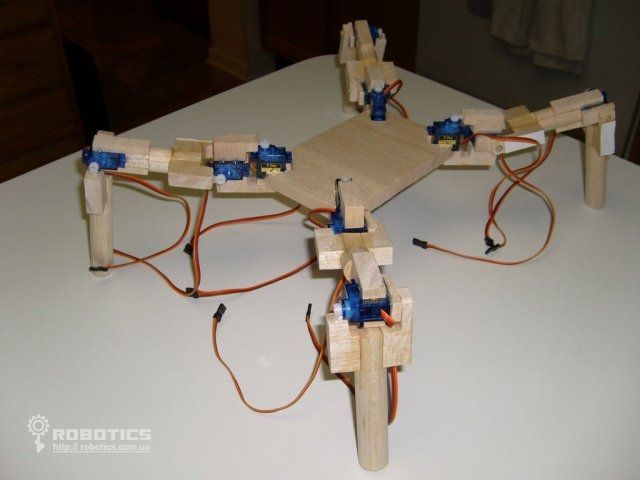
Ниже можно скачать готовую прошивку для робота. Если самоделка собрана правильно, то при запуске робот должен подняться и начать покачивать лапой.
Для установки кода для работы понадобятся драйвера TLC5940, их можно скачать на этом сайте .
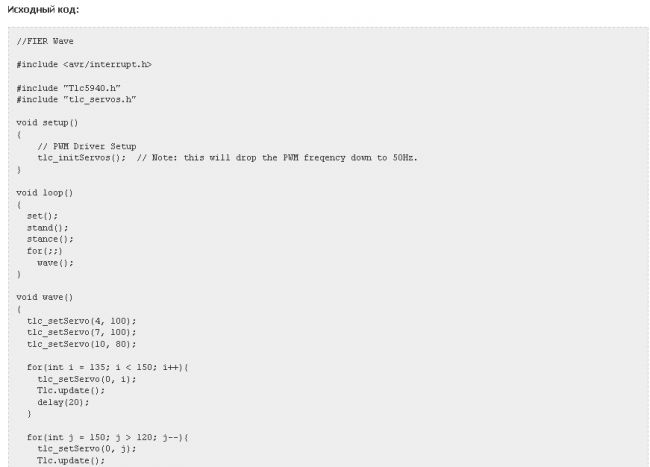
Теперь робот готов и его можно тестировать. При запуске он будет очень интересно передвигать ногами подобно пауку. В качестве апгрейда на робота можно установить камеру, различные датчики и прочие элементы, которые значительно помогут расширить его функционал и возможности.
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Самостоятельно собранный робот, реагирующий на источник света, может стать прототипом робота-плантатора НЕХА, который будет «гоняться» за солнечным светом, столь необходимым для домашних растений.
Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Конфигурация «светолюбивого» робота может быть любой и зависеть от наличия необходимых материалов, предпочтений и фантазии создателя.
Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Читайте также: