
Механические пальцы игрушка на пальцы
Обновлено: 01.05.2024
Ношение искусственного шестого пальца на руке на протяжении некоторого времени влияет на представление пальцев в моторной коре мозга, показали исследователи из Великобритании. Они попросили людей несколько дней носить и пользоваться управляемым дополнительным большим пальцем руки и отследили активность моторной коры до и после этого с помощью фМРТ. Выяснилось, что после нескольких дней ношения устройства паттерны мозговой активности в моторной коре, ассоциированные с каждым пальцем, стали более похожи друг на друга, но эти изменения обратимы. Статья опубликована в Science Robotics.
Большинство электромеханических искусственных конечностей — это протезы рук и ног, которые люди утратили вследствие травм или заболеваний. В этой области ключевую роль играют технические разработки, улучшающие характеристики протезов. В то же время есть и другое направление: расширение возможностей человеческого тела при помощи дополнительных искусственных конечностей. Эта область довольно мала сама по себе, и еще меньше в ней работ, сконцентрированных не на конструировании новых электромеханических рук или ног, а на изучении того, как мозг воспринимает новые части тела, которыми он ранее никогда не управлял. В то же время знать то, как мозг способен адаптироваться в таких условиях, важно для создания дополнительных конечностей, применимых на практике и в течение длительного времени, а не в лабораторных условиях.
В 2017 году Дэниэль Клод (Danielle Clode) разработала дополнительный большой палец руки, согнуть который можно, нажав пальцем ноги на датчик в ботинке. На тот момент палец был дипломным проектом Клод в Королевском колледже искусств в Лондоне. Позже Тамар Макин (Tamar Makin) из Университетского колледжа Лондона, специализирующаяся на исследованиях представления частей тела в мозге, пригласила Клод для изучения влияния разработанного ей пальца на это представление. Исследования показывают, что с ранних этапов развития в мозгу формируется четкое представление руки и отдельных пальцев. Макин с коллегами решила провести эксперименты, замерив паттерны активности моторной коры, ассоциированные с движением пальцев, до, во время и после относительно длительного использования нового пальца.

Paulina Kieliba et al. / Science Robotics, 2021
Сам палец крепится на руку напротив большого пальца и состоит из трех сегментов. Вместе с ним на запястье надевается браслет с двумя электромоторами, натягивающими тросы, и тем самым двигающими палец. У него есть две степени свободы: палец можно сгибать и поворачивать. Клод выбрала для управления дополнительным пальцем руки пальцы ноги — под большими пальцами расположено два датчика давления, один из которых отвечает за сгибание, а второй управляет поворотом. Эта схема оставляет руки свободными и в целом хорошо зарекомендовала себя, но имеет и недостаток, связанный с тем, что пальцем нельзя управлять во время ходьбы.
Исследователи пригласили 36 добровольцев-правшей (24 в основной группе и 12 в контрольной, которая носила неуправляемый палец). На протяжении примерно недели (от семи до девяти дней) добровольцы участвовали в восьми экспериментальных сессиях. Сначала каждый из них в течение одного часа носил дополнительный палец, привыкая к нему, изучая принцип управления и слушая инструкции по следующим этапам эксперимента. Затем проводилась четырехчасовая сессия с заданиями и фМРТ-сканированием. В пять последующих дней добровольцы по два часа в день выполняли различные задания, например, поднимали и переставляли предметы, держали рукой стакан и одновременно доставали из него той же рукой при помощи ложки предметы и так далее. После этого проводился еще один четырехчасовой эксперимент и еще одно фМРТ-сканирование.
Уже в процессе исследования авторы решили провести еще одно сканирование через 7-10 дней после окончания экспериментов, но им удалось привлечь только 12 участников.
За время экспериментов добровольцы освоились с управлением устройством и стали быстрее выполнять все задания. Также авторы проверяли привыкание к новому пальцу, попросив участников поочередно сомкнуть новый палец с настоящими с открытыми и закрытыми глазами. В этом задании также наблюдалось улучшение контроля по мере проведения экспериментов. Во время одного из заданий добровольцев просили выполнять задания пальцами (своими и дополнительным) и одновременно выполнять арифметические вычисления — тем самым исследователи проверяли, как повышенная когнитивная нагрузка сказывается на управлении. Оказалось, что она никак не сказывалась и участники выполняли задачи рукой все также эффективно.
Исследователи обнаружили, что у группы с управляемым пальцем по сравнению с группой контроля снизились кинематические синергии движений, то есть движения стали сложнее и для их описания необходимо больше компонентов, а движения отдельных пальцев стали менее коррелирующими между собой. Изменения в скоординированности движений пальцев подкрепили результаты фМРТ-сканирования.
Из-за металлических частей в пальце добровольцы не надевали его в томографе. В качестве контроля ученые использовали активность области моторной коры, активирующуюся при работе левой руки (устройство носили на правой). Во время сканирования участники поочередно двигали отдельными пальцами. Результаты показали, что у группы, управлявшей пальцем во время эксперимента, паттерны активности моторной коры, ассоциированные с движением конкретных пальцев, стали меньше различаться между собой. При этом на левой руке такого эффекта не было. Исследование через несколько дней после эксперимента показало, что сокращение различия между представлениями пальцев стало частично восстанавливаться.
В Древнем Востоке считалось, что через пальцы рук можно воздействовать на все тело человека, включая его внутренние органы. Это учение основывалось на том, что на пальцах расположено огромное количество биологически активных точек, стимулируя которые можно улучшить работу всех систем организма.
Акупунктура до сих активно используется в современном мире и это доказывает эффективность древневосточных учений. Воздействуя на активные точки человека, можно улучшить работу мочеполовой, пищеварительной и опорно-двигательной системы, избавиться от головных болей, напряжения, стресса и множества других проблем.
Стимулировать активные точки можно и без посещения специалиста по китайской медицине, достаточно приобрести массажер для рук и пальцев. Такие массажёры не только положительно повлияют на общее состояние организма, но и помогут при заболеваниях суставов. Большой плюс массажеров для пальцев в том, что они очень компактные и использовать их можно где угодно.
В этой статье мы расскажем о 10 лучших на сегодняшний день массажерах для пальцев. Поможем выбрать самый подходящий и расскажем какой из них будет наиболее полезен для решения той или иной проблемы.
Массажер Су Джок

Этот массажер, в основе действия которого заложено учение об иглоукалывании, представляет собой пластиковый шарик с иголками, внутри которого спрятаны металлические пружинки. Пружинки предназначены для того, чтобы одевать их на пальцы и катать. Таким образом массажер оказывает огромное положительное влияние на весь организм.
Во время использования массажера расширяются капилляры и улучшается циркуляция крови, нормализуется проводимость нервных окончаний. Такое воздействие оказывает общеукрепляющий эффект на весь организм человека и положительно влияет на иммуннитет.
Массажер для пальцев рук

Этот массажер очень пригодится офисным сотрудникам, школьникам, геймерам и вообще всем тем, кто много времени проводит за компьютером. Ролики этого небольшого массажера оказывают по-настоящему комплексное воздействие на пальцы:
- улучшение циркуляции крови;
- ускорение роста ногтей;
- улучшение качества кожи;
- утоньшение пальцев.
Массажер превосходно снимает чувство онемения с пальцев. Также он поможет улучшить работу всего организма, поскольку прекрасно стимулиет биологически активные точки.
Массажер BLACKROLL BALL 8 см

Изначально данный массажный мячик был создан специально для спортсменов. Массажер эффективно уменьшает мышечную боль, помогает сохранить гибкость мышц, способствует удалению молочной кислоты из мышц и стимулирует кровообращение. Также он эффективен для массажа и тренировки рук и пальцев. Регулярное разминание мячика улучшит состояние суставов и связок, подготовит их к нагрузкам. Этот массажер незаменим для тех, кто занимается силовыми тренировками с тяжёлыми весами.
Немаловажно, что массажер изготовлен из безопасных для окружающей среды веществ и поддаётся переработке.
Тренажер для пальцев рук LTR JY-70

Этот тренажер эффективно помогает восстановить работу связок и мышц кисти после серьезных травм и развить группы мышц, которые контролируют захват, что важно во многих видах спорта.
Данный тренажер лёгок и удобен в использовании, очень мало весит и имеет компактные размеры.
Примечательно, что этот массажер производится в разных цветах и при покупке это обязательно нужно учитывать. Тренажер определённого цвета имеет свою нагрузку сопротивления:
Массажер для кисти руки — кольцо арт.1317

Это массажное кольцо обладает хорошим функционалом и просто в обращении. За короткий срок кольцо поможет снять напряжение и расслабит. А мягкие, но остроконечные иголки кольца выполняют эффективный акупунктурный массаж.
Регулярное использование массажера окажет положительное влияние на весь организм:
Шарик Су Джок

Су-джок — это своеобразная вариация иглоукалывания, пришедшая к нам из восточной медицины. Этот маленький недорогой массажер оказывает колоссальное положительное влияние на весь организм, воздействуя на биологически активные точки, расположенные на ладонях, пальцах и стопах. В массируемой области происходит расширение капиллярной сети, в больном органе, соответствующим определенным точкам на пальцах – усиливается кровообращение и проводимость нервных окончаний. Эти процессы позволяют улучшить трофику тканей и оказывают общеукрепляющий эффект на организм человека.
Массажер для кистей рук Дорожный с шипами

Этот простейший массажер эффективно воздействует на акупунктурные точки, расположенные на руках. Массажер позволяет снять напряжение, активизирует кровообращение, нормализует мышечный тонус. Данный массажер является важной составляющей терапии после инсульта, травм и при артрите.
Несомненный плюс массажера в том, что стоит он очень недорого и доступен всем. Также, благодаря своим компактным размерам, массажер можно постоянно носить с собой и использовать где угодно.
Тренажер для пальцев Finger Exerciser

Этот массажер станет незаменимым помощником при восстановлении суставов и связок кисти после травм. Также он пригодится теннисистам, гольфистам и другим спортсменам, для которых важно развить группы мышц, отвечающих за захват.
Данный тренажер выпускается в нескольких цветах. Каждый цвет означает свою степень нагрузки, поэтому выбирая тренажер нужно исходить из этого, а не из своих личных предпочтений. Существует 4 степени сложности:
Кистевой тренажер BRADEX SF 0198 14 х 10.5 см

Этот карманный тренажер может оказать массу положительных эффектов. Среди которых:
- увеличение силы хвата;
- прокачка мышц предплечий;
- развитие спортивной выносливости;
- увеличение работоспособности.
Жесткая металлическая пружина создает сопротивление равное 68 кг и нагрузку, что значительно повышает эффективность тренировок. Удобные металлические ручки эспандера позволяют надежно фиксировать его в ладони, что обеспечивает максимальный комфорт в использовании.
Мидл Силомер электронный бытовой EH 101 «Здоровье»

Данный прибор предназначен для определенич силы сжатия кисти человека. Пределом измерения усилий является 90 кг. Прибор имеет встроенную память, способную запомнить 99 пользователей. Также силомер запоминает предыдущий результат и сравнивает его с нынешним — это позволит отследить прогресс в тренировках.
Регулярное использование этого тренажёра поможет развить суставы, связки и мышцы кисти и предплечья, улучшит силу захвата. Также тренажер позволит восстановить мышцы и связки после травм и болезней.
Многозадачный развивающий мяч Тряси и крути легко удерживать в руках самому маленькому ребенку. Шесть дорожек для бусин, красочные кнопки, яркие элементы для нажатий, скольжения, встряхивания и вращения развивают моторику у малышей. Особенности:- множество песен, мелоди.
Развивающая игрушка VTech Мяч Тряси и крути (80-502926)

Happy Baby Набор игрушек на пальцы LITTLE FRIENDS (32024)
Пальчиковый набор предназначен для игры с ребенком в пальчиковый театр. Набор познакомит детей с героями сказок, научит говорить целыми предложениями, формулировать и выражать свои мысли, составлять связный рассказ. Ваш малыш сможет самостоятельно пересказать всю сказку.

Крона Пальчиковый набор Сказки (170-009)

Весна Кукольный театр по сказкам №2 (В2800)
В наборе представлены игрушки в виде разных животных, которые надеваются на пальцы. Игрушки помогают развить мелкую моторику, творческое мышление, навыки общения и познавательный интерес. С набором Fun Amigos принятие ванны можно совместить с кукольным театром. Вы может.
Набор для ванной Happy Baby Fun Amigos (32010)
Набор пальчиковых кукол КУКОЛЬНЫЙ ТЕАТР из натурального дерева с использованием качественных текстильных элементов - это великолепный набор кукол, которые станут любимыми игрушками каждого ребенка. Если вы предпочитаете фактуру натурального дерева вместо пластика или пл.
АНДАНТЕ Набор пальчиковых кукол Театр (Д276а-3)
SmileDecor Пальчиковый театр Теремок (Ф111)
тип: куклы, материал: текстиль, тип кукол: куклы на руку, количество кукол: 1 шт., высота кукол: 22 см
Мякиши Игрушка-рукавичка Собачка в ассортименте (123)

Игрушка детская "Театр на пальчиках" 5 персонажей в наборе

Десятое королевство Кукольный пальчиковый театр Лесные жители (03947)

IKEA Пальчиковые куклы Титта Дьюр
1 Toy Игрушка-антистресс Поп Ит Вечная пупырка Квадрат радужный Тренд 2021 года - Поп ит. Тактильная сенсорная игрушка POP IT антистресс, вечная пупырка - это увлекательная игра и антистресс, рассчитана на взрослых и детей, не имеет возрастного ограничения. Кто не люб.

Pop it 1 TOY Квадрат Т21604 разноцветный
Методы воспитания и образования будут меняться бесконечно, но во все времена постоянным остаётся одно ― радость ребёнка от подаренной ему игрушки. Как известно, счастливая улыбка крохи ― самая большая награда для родителей. Фигурки на пальцы пальчиковый театр Единороги.
КНР Игрушки Фигурки на пальцы пальчиковый театр Единороги 2,5х16,5х20 см
Методы воспитания и образования будут меняться бесконечно, но во все времена постоянным остаётся одно ― радость ребёнка от подаренной ему игрушки. Как известно, счастливая улыбка крохи ― самая большая награда для родителей. Фигурки на пальцы пальчиковый театр Единорог 2.
Доброго дня, мозгоинженеры! Это мозгоруководство расскажет вам как своими руками создать высококачественную роботизированную руку, причем с малыми затратами по себестоимости.
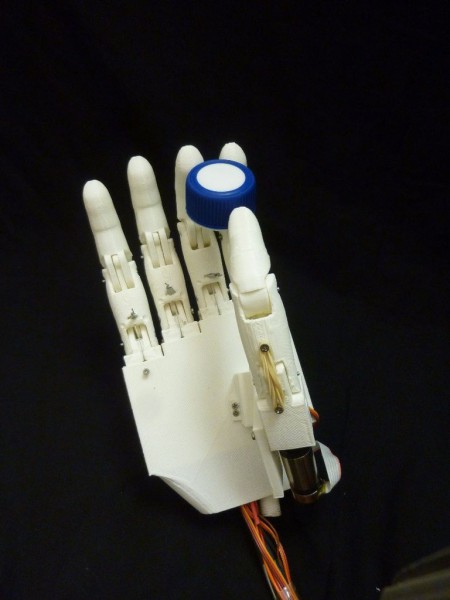
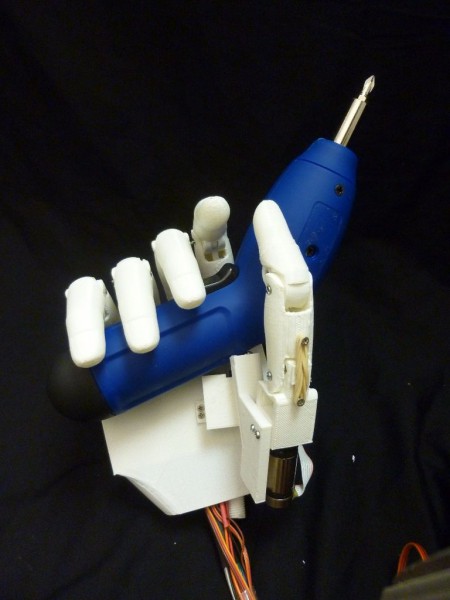
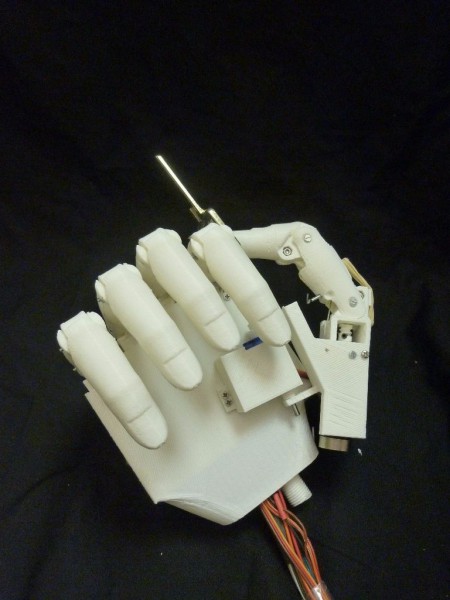
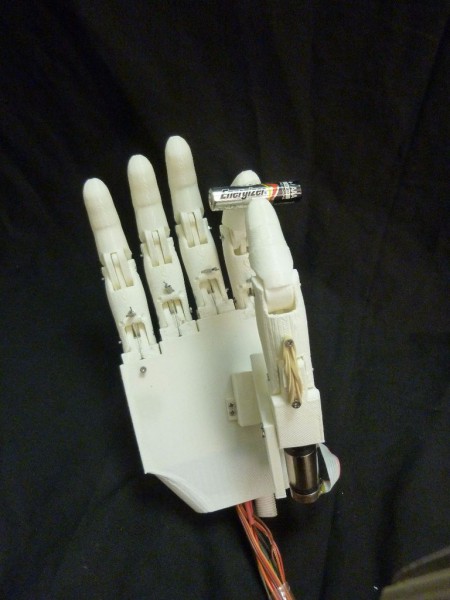
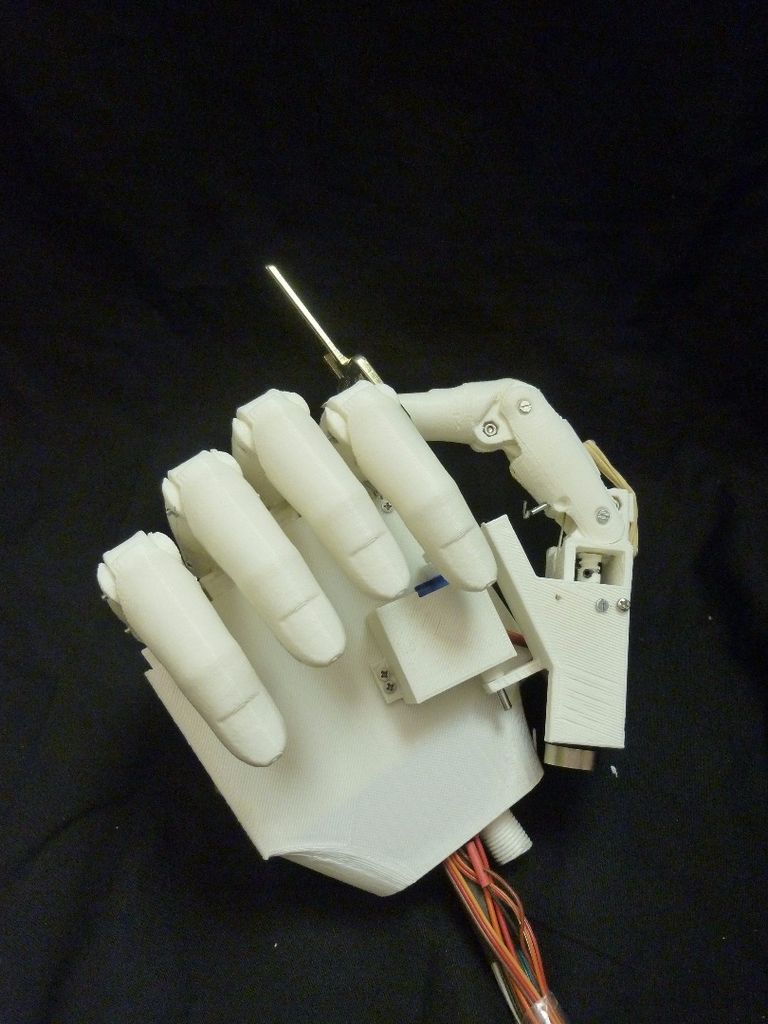
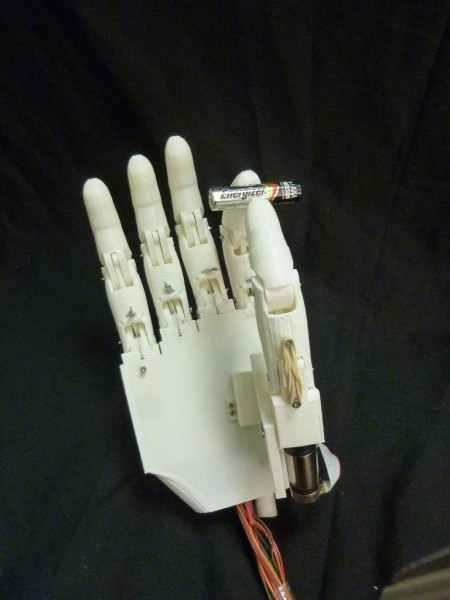
Данная «open source» мозгоподелка превосходит аналогичные робо-руки не только по цене сборки, но и по производительности, и не уступает даже промышленным. А если использовать в ней биоэлектрическое управление, то она достаточно легко выполняет захват различных предметов, таких как электроотвертка, крышка или батарейка.
Шаг 1: Сравнение производительности аналогов

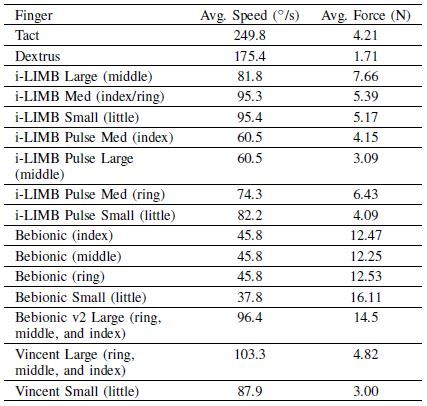

Как уже было сказано, данная самоделка не уступает промышленным аналогам, и достигнуто это тщательным подбором компонентов. На первой представленной таблице показано сравнение характеристик двигателя, который используется в коммерческих робо-руках и выбранным мной.
Зная производительность двигателей из промышленных аналогов, я подобрал подходящий по мощности, но более дешевый двигатель, то есть сила сжатия пальцев моей робо-руки как и у промышленных. Но как показано на второй таблице, скорость пальцев моей мозгоподелки выше коммерческих аналогов, что облегчает захват предметов и повышает производительность. На третьей таблице показаны размер и вес компонентов робо-руки и аналогов, и исходя из них видно, что использование 3D компонентов облегчает общий вес поделки.
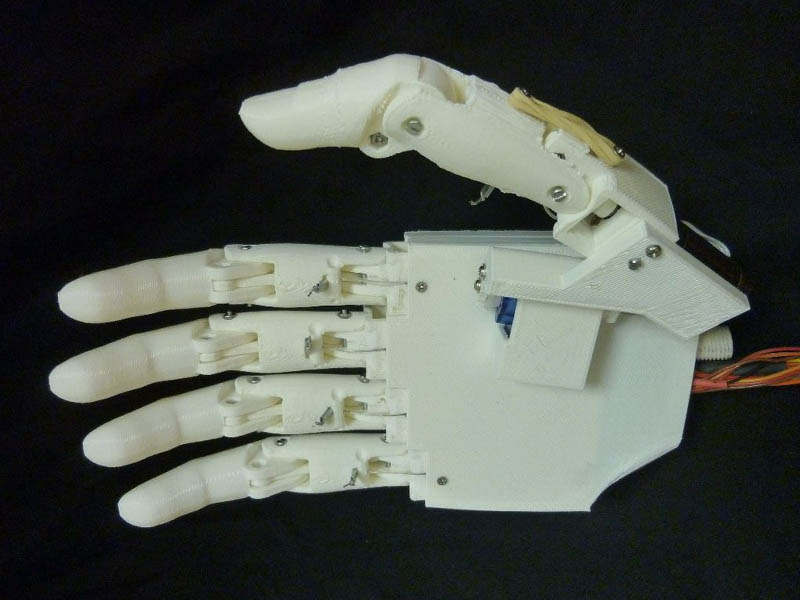
По сравнению с OpS (open source) аналогами сила захвата данной робо-руки в 2.5 раза больше, вес на 20% меньше, а ладонь примерно наполовину тоньше. То есть по характеристикам эта самоделка имеет преимущества для пользователя. Кроме того, пальцы робо-руки действуют более согласовано, суставы сгибаются пропорционально и надежно каждый раз, что обеспечивает поделке стабильное и производительное функционирование. Конструкция многих OpS аналогов проста – «сухожилие» просто проходит внутри пальца и стягивается по принципу лебедки, что приводит к неловким, резким движениям руки и несогласованности суставов.
И все же, несмотря на описанные преимущества, данная робо-поделка имеет и недостатки. Так напечатанные 3D компоненты более подвержены механическим повреждениям по сравнению с металлическими компонентами аналогов, то есть их проще сломать, но и при этом, проще отремонтировать. Еще в этой робо-руке отсутствует фиксирующий механизм, то есть необходимо постоянно прикладывать силу для удержания захвата, что снижает энергоэффективность.
Шаг 2: Компоненты

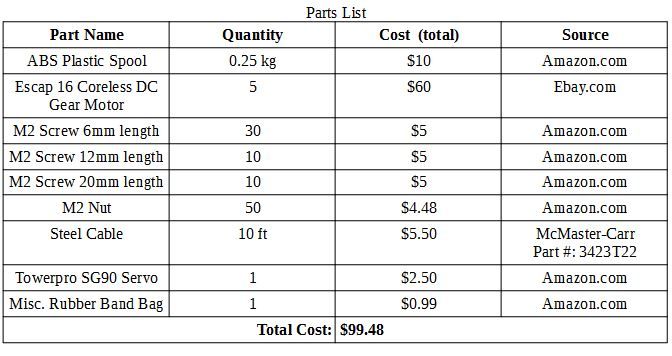
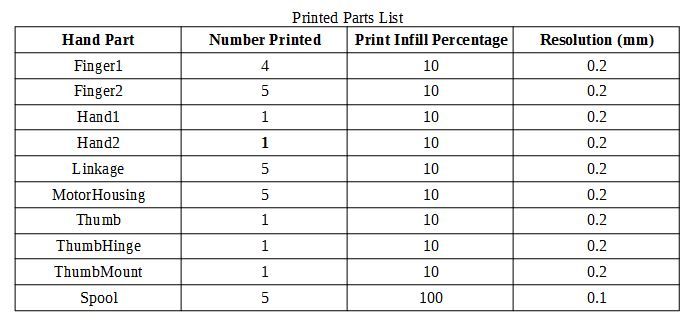
Конструкция этой робо-руки разрабатывалась на основе общедоступных и 3D-печатных компонентов, весь список которых, а также места приобретения, представлены в таблицах на мозгофото. Конкретные ссылки я не привожу из-за частой смены поставщиков, но если какой-либо компонент недоступен, то не бойтесь менять его на аналогичный!
Свои 3D-компоненты я распечатал с разрешением 0.2мм и 10% заполнением, что обеспечивает довольно быструю печать (около 14 часов) с необходимой прочностью получаемых деталей. Вам я тоже советую печатать детали для этой робо-поделки на максимальных значениях разрешения и заполнения вашего принтера.
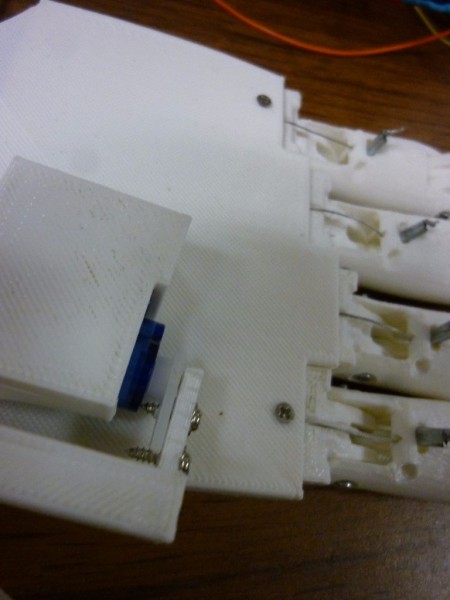
Шаг 3: Сборка пальцев



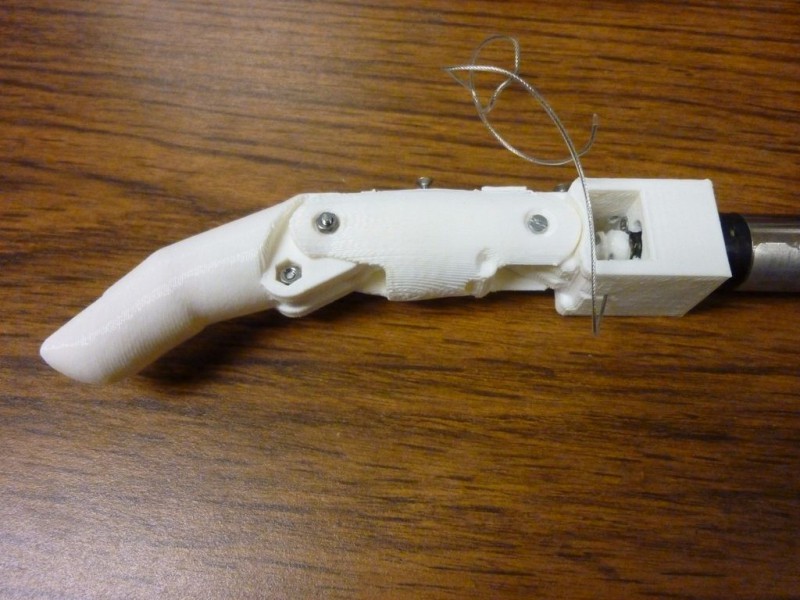
Все пальцы, включая и большой, собираются однотипно, и этот процесс подробно показан на фото, а еще подробнее в инструкции.
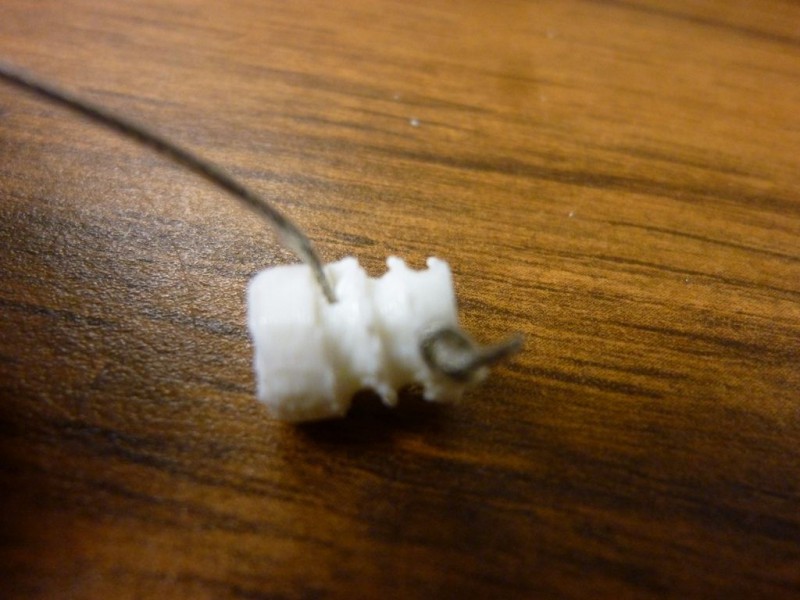
На одном конце металлического тросика завязываем узел и скрепляем его каплей супер-клея, затем пропускаем тросик сквозь отверстие катушки до упора узелка. Пропускаем так, чтобы узелок оказался сверху катушки, а свободный конец выходил из нижнего отверстия.
Берем двигатель и нанизываем на его вал катушку, при этом нанизываем так, чтобы плоскость катушки плотно прилегла к плоскости вала, иначе есть риск повредить ее.
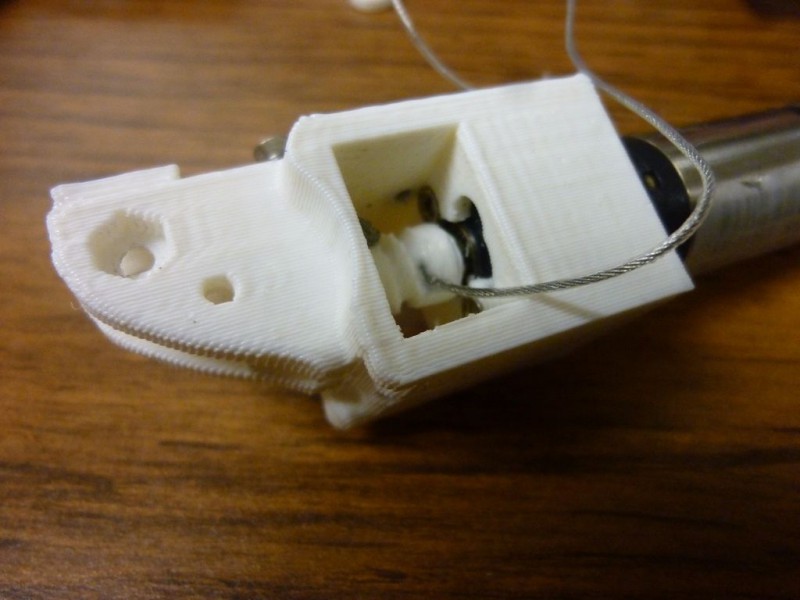
В элемент корпуса двигателя вставляем в небольшие отверстия два 6мм-х винта М2, аккуратно устанавливаем этот элемент на двигатель, находим нужное положение катушки/двигателя и закрепляем винтами.
Собираем элементы кончика пальца и связку, для крепления используем винты и гайки М2. При этом крепим не плотно, оставляя достаточную степень свободы суставам.
Через среднюю фалангу пропускаем связку и соединяем с верхней частью пальца, ориентируемся при этом на фото, а затем скрепляем 20мм-ми винтами М2 обе части пальца.
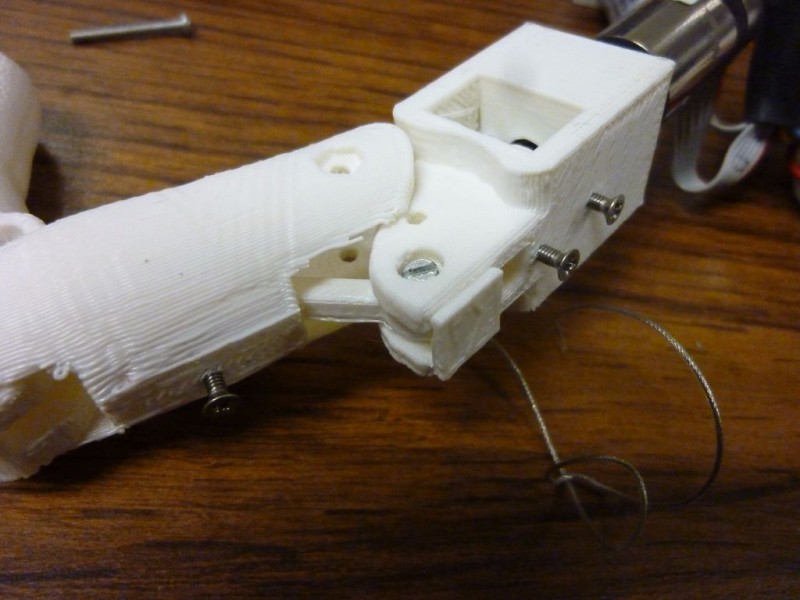
Далее соединяем связку с соответствующим отверстием в корпусе двигателя и закрепляем ее 12мм-м винтом М2, для этого потребуется полностью согнуть палец.
Соединяем палец с корпусом двигателя и через отверстие в нижней части скрепляем 20мм-м винтом М2.
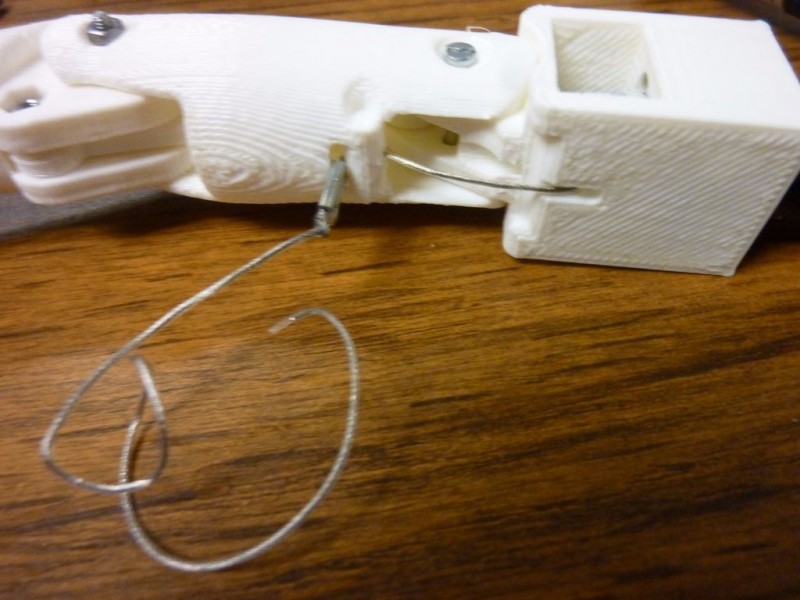
Пропускаем свободный конец тросика внутри корпуса двигателя и через отверстие в нижней части пальца, завязываем узел, закрепляем его каплей супер-клея и обрезаем лишний конец тросика кусачками.
Повторяем все шаги с оставшимися пальцами, в том числе и большим, который хотя и имеет некоторое отличие в деталях, собирается аналогично. Когда все пальцы собраны, приступаем к ладони: берем пластину с 4 отверстиями, это задняя часть, и крепим к ней собранные пальцы на 6мм-ые винты М2. После этого устанавливаем переднюю пластину и закрепляем ее в двух местах к крайним пальцам 6мм-ми винтами М2.
Шаг 4: Сервопривод
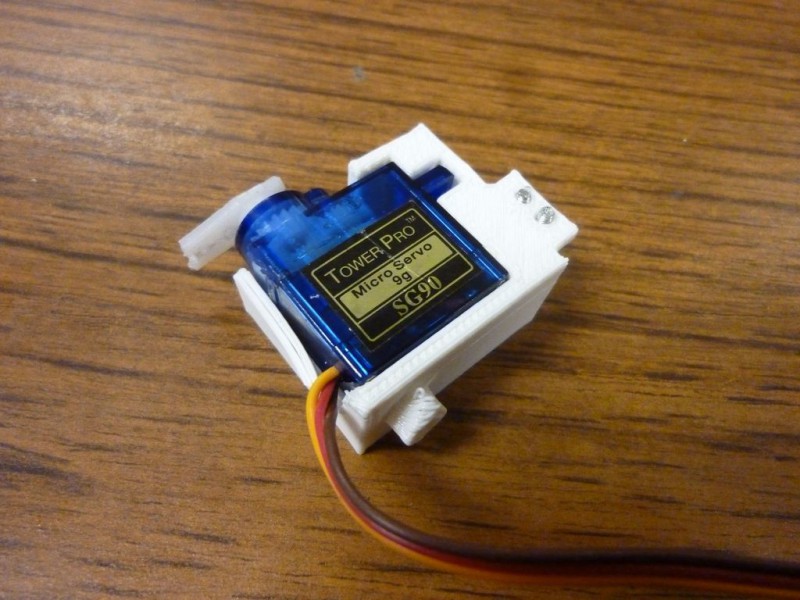

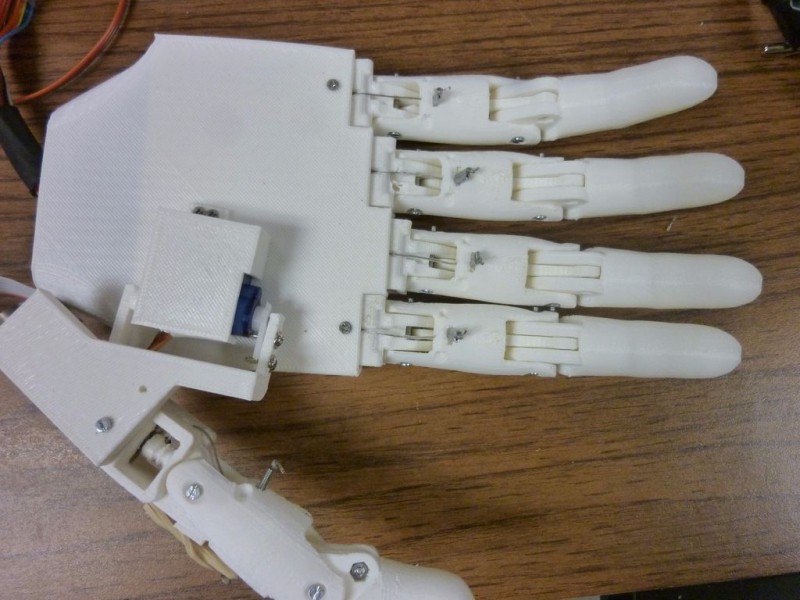
Приступаем к окончательной мозгосборке. Берем сервопривод и вставляем в распечатанный для него суппорт, который должен плотно подходить к сервоприводу.
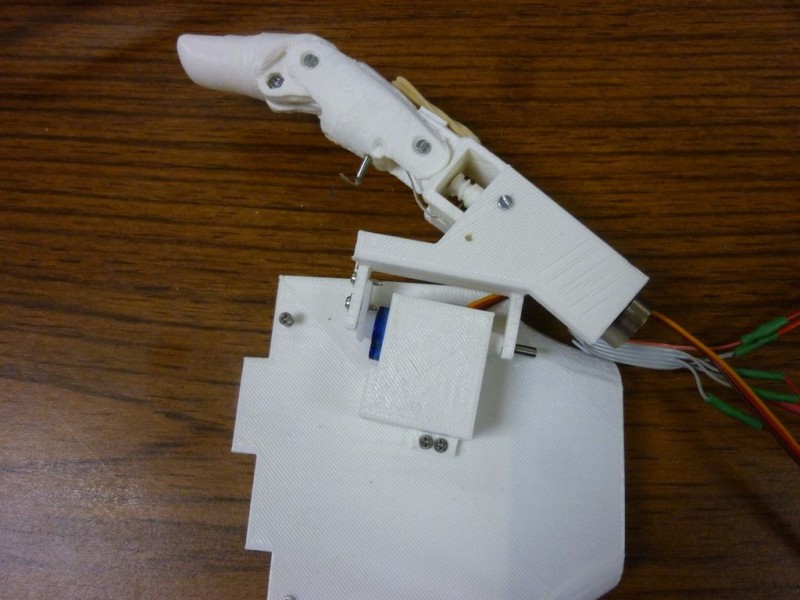
На большой палец монтируем кронштейн, который будет сцеплять его с сервоприводом и закрепляем 6мм-м винтом М2.
Кронштейн большого пальца соединяем с сервоприводом и закрепляем винтами, после этого прикладываем всю конструкцию большого пальца/сервопривода к передней пластине руки и в соответствующих местах скрепляем 6мм-ми винтами М2.
Механическая сборка завершена!
Шаг 5: Управление

Второй способ подходит для людей занимающихся компьютерными технологиями. Суть его в создании PID-контроллера или кнопочного управления для перемещения руки в различные положения.
На этом все, надеюсь было полезно. Удачи в вашем мозготворчестве!
Знакомство с такой серьезной и загадочной отраслью науки, как робототехника всегда производит на детей сильное впечатление, вызывает у них интерес к науке и жажду своих собственных исследований. Кроме того, у этой игрушки прикладное назначение – знакомство ребенка с законами механики и их применение в реальной жизни. Получается, что это вовсе и не игрушка, а замечательный помощник в учебе!
С удовольствием представляю Вам мастер класс по изготовлению механической руки. По внешнему виду она напоминает экзоскелет, повторяющий естественные движения человеческой руки. Чтобы управлять этим удивительным устройством юному инженеру понадобится изучить строение человеческой руки и перенести его на картонный прототип, а затем "научить" руку двигаться.
Для работы понадобятся следующие материалы и инструменты:
картон; простой карандаш и маркер;ножницы;канцелярский нож;5 пластиковых трубочек; аптечные резинки; нитки средней толщины, иголка; клеящий пистолет.

Ход работы.
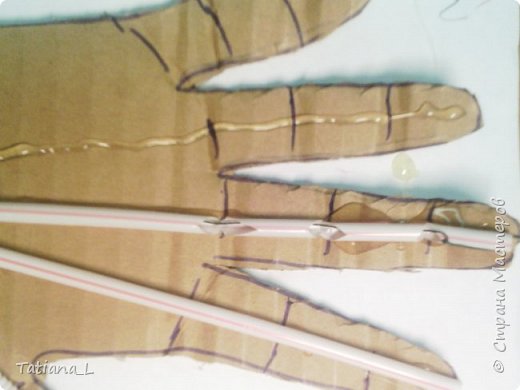
Шаг первый. Положите руку на картон, обведите и вырежьте.

Обратите внимание на направление волокон многослойного картона.

Шаг второй. Промаркируйте линии сгибов фаланг на картоне, ориентируясь по своей руке.

Шаг третий. В местах сгибов фаланг пальцев сделайте небольшие надрезы канцелярским ножом на внешней стороне руки. Зафиксируйте сгибы на каждой фаланге.

Пальцы картонной руки должны свободно сгибаться в местах надрезов.

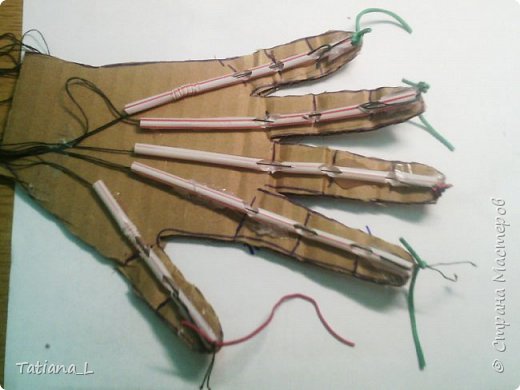
Шаг четвертый. Прикрепите пластиковые трубочки с помощью скотча к "руке" как показано на рисунке.

Шаг пятый. Теперь на местах сгиба фаланг пальцев сделайте надрез на пластиковых трубочках на внутренней стороне. Надрезы должны иметь угол примерно 45 градусов, чтобы «пальцы» могли сгибаться.

Шаг шестой. Удалите скотч и приклейте пластиковые трубочки к картону с помощью клеевого пистолета как показано на рисунке.
Шаг седьмой. Проденьте в трубочки нитки и закрепите их на концах "пальцев". Здесь же прикрепите аптечные резинки.
Шаг восьмой. С помощью клеевого пистолета закрепите резинки на тыльной стороне "руки".

Механическая рука готова! Удерживая нити в руке и потягивая их на себя можно выполнять различные движения рукой: сгибать пальцы, брать легкие предметы и т.п.

Поняв принцип работы механической руки, можно предложить детям сделать собственные проекты по изготовлению собственных вариантов экзоскелетных рук. На детей производит особое впечатление, когда на такую "руку" надета перчатка.

Для более наглядного изучения строения человеческой руки можно с тыльной стороны можно нарисовать скелет реальных костей руки.
Читайте также: