
Радиоуправляемые китайские игрушки схемы
Обновлено: 07.05.2024
Одно время очень популярны были китайские радиоуправляемые машинки. Сегодня бум прошел, дети выросли, но еще с тех времен у многих остались эти игрушки, которые в большинстве своем валяются без дела. У кого-то сломанные, у кого-то исправные. Но даже у сломанной машинки электроника, как правило, жива, и ее можно использовать для дистанционного управления какими-нибудь устройствами. Сегодня мы поговорим о комплекте микросхем PT8A977B/978B, который устанавливался в эти машинки.
PT8A977B
Микросхема представляет собой пятикомандный шифратор, причем несколько команд могут передаваться одновременно. Типовая схема включения шифратора особых пояснений не требует:
Резистор R1 задает тактовую частоту шифратора. При указанном на схеме номинале она составляет 128 кГц. Если вы используете радиопередатчик, то сигнал на модулятор подается с вывода 8. Если в качестве передатчика используется ИК-канал, то сигнал берется с вывода 7. Отличие этого вывода от вывода 8 состоит в том, что на нем кодовая посылка заполняется поднесущей. Частота поднесущей составляет половину тактовой частоты. В нашем случае это 64 кГц.
Вывод 10 служит для управления питанием передатчика. Пока ни одна кнопка не нажата, на этом выводе низкий уровень, а сама микросхема потребляет ток порядка 0.1 мА. При нажатии на кнопку или группу кнопок, на этом выводе появляется высокий логический уровень, включающий передатчик. Это позволяет существенно сэкономить энергию батарей.
PT8A978B
Микросхема представляет собой дешифратор команд, сформированных шифратором PT8A977B.
Как и шифратор, эта микросхема в состоянии обрабатывать параллельно несколько команд. В зависимости от полученной команды (пакета команд) на соответствующем выходе (выводы 6, 7, 10 -12) появляется высокий логический уровень. Резистор R9 – частотозадающий. Он задает тактовую частоту работы дешифратора.
Тактовые частоты шифратора и дешифратора должны совпадать как можно точнее. Поэтому номиналы частотозадаюших резисторов шифратора и дешифратора должны иметь минимальный разброс. В противном случае передача команд будет неустойчивой.
Что в машинке?
А теперь посмотрим, по какой схеме собраны приемник и передатчик в радиоуправляемой машинке. Ведь их вполне можно использовать для своих целей.
Передатчик
В пульте машинки используется радиопередатчик, работающий на частоте 27.145 или 46 МГц.
На транзисторе Q1 собран генератор несущей. Его частота стабилизируется кварцевым резонатором Х1. Транзистор Q2 работает в усилителе мощности. Полезный сигнал подается непосредственно на его базу, модулируя несущую по амплитуде. Питается передатчик напрямую от батареи, а микросхема подключена через простейший параметрический стабилизатор, собранный на стабилитроне D1. Не совсем экономично, но обеспечивает стабильность тактовой частоты.
На заметку. Непонятно почему, но китайские конструкторы не использовали вывод 10 микросхемы для управления питанием передатчика. Он работает даже тогда, когда ни одна кнопка не нажата и нужды в нем нет. Да и пятую команду они не использовали. Могли быть фары или сирену к ней подключить.
Вы наверняка заметили, что некоторые элементы помечены звездочкой, а номиналы их не указаны. Эти номиналы будут зависеть от частоты, на которой работает передатчик. Они указаны в таблице ниже.
Приемник
Приемник собран на транзисторе Q1 и для стабилизации частоты питается через стабилизатор вместе с микросхемой (стабилитрон D1). Выходы микросхемы при помощи транзисторных ключей управляют двумя двигателями – тяговым (М1) и рулевой машинки (М2). Двигатели питаются от батареи напрямую.
Как и в схеме передатчика, в приемнике тоже есть элементы, номиналы которых зависят от частоты приема (она должна совпадать с частотой передатчика). Уточнить эти номиналы можно в таблице, приведенной ниже.
Вот мы и разобрались с начинкой китайской радиоуправляемой машинки. Возможно, эта информация кому-нибудь пригодится.
Наверняка у тех, кто имеет детей, накапливается куча старых сломанных игрушек. Где-то отломаны колеса, сломаны пульты. Дети в них уже давно не играют, и все это барахло валяется под ногами.

Дары китайской промышлености
Время от времени мы проводим ревизию игрушек и отбираем те, которые пойдут на разбор.
Внутри типичной китайской игрушки можно найти много полезных деталей:
Один-два мотора с редукторами
NiMh или LiIon аккумуляторы
Имея все эти запчасти и конструктор лего можно увлечь детей конструированием новых игрушек. Приведу пару примеров. Слева моторчик, вклеенный в кубик от лего-дупло. Справа к мотору с мощным редуктором я приклеил платформу от лего.
Тумблер в кубике от лего
Светодиоды оказались необычные. При подаче на них постоянного напряжения они начинают сами мигать разными цветами.
В основной массе китайских игрушек оказались стандартные моторчики, как на картинке выше. Они довольно слабосильные и не могут крутить колеса напрямую. К ним нужен редуктор. Вот, например, небольшой редуктор, сделанный из имеющихся деталей лего-техник. Рядом можно видеть батарейный отсек на платформе от лего.

На Али для таких моторчиков продается готовый редуктор с колесами.
Редуктор с Али
Сгоревший моторчик легко заменяется на запасной. У этого редуктора нет штатных мест крепления, поэтому я прикрутил к нему планку от лего-техник саморезами прямо в корпус.
Отдельного описания заслуживает плата управления. В основной массе китайских игрушек они на 4-5 каналов.
Мне попалась плата на чипе TXM8D423TS. Даташит на этот чип мне найти не удалось, но можно обойтись и без него. Я нашел на этой микросхеме 4 выхода, плюс еще один не распаянный.
На плате есть монтажные точки с надписями F,B,L,R - это выходы вперед, назад, влево, вправо. К ним напрямую можно подключать моторы.
На плате написано 40М, значит, этот приемник работает на частоте 40МГц. Был найден пульт, работающий на 40МГц, но он не смог управлять платой.
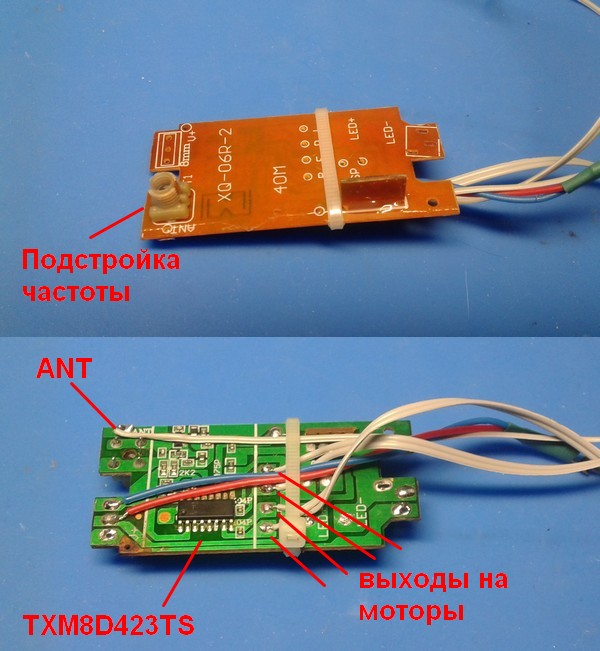
Плата управления
Я предположил, что плата настроена на какую-то неправильную частоту. В углу видна катушка с винтом для подстройки частоты приемника, но для начала надо определить частоту передатчика.
Берем осциллограф. Соединяем кончик щупа с его землей. Получается виток. Этот виток надеваем на антенну пульта, нажимаем на кнопки и видим на экране осциллографа несущую с частотой 40,7 МГц
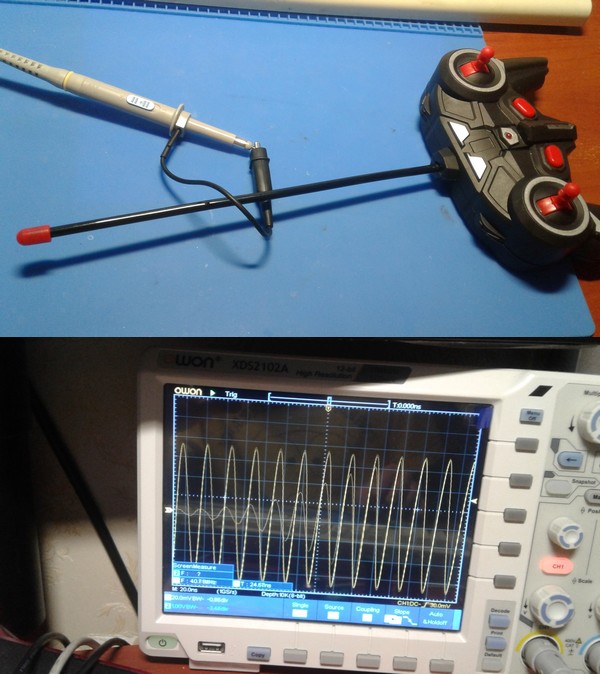
Измерение частоты пульта
Затем внимательно смотрим на плату приемника в районе надпись ANT - это место присоединения антенны. Рядом есть транзистор. Если подать на плату управления питание 5 вольт и взяться щупом за одну из ног транзистора, то тоже можно увидеть какую-то частоту. При этом не обязательно нажимать на пульт. Вращая винт на подстроечной катушке можно получить частоту нашего пульта 40,7 МГц.
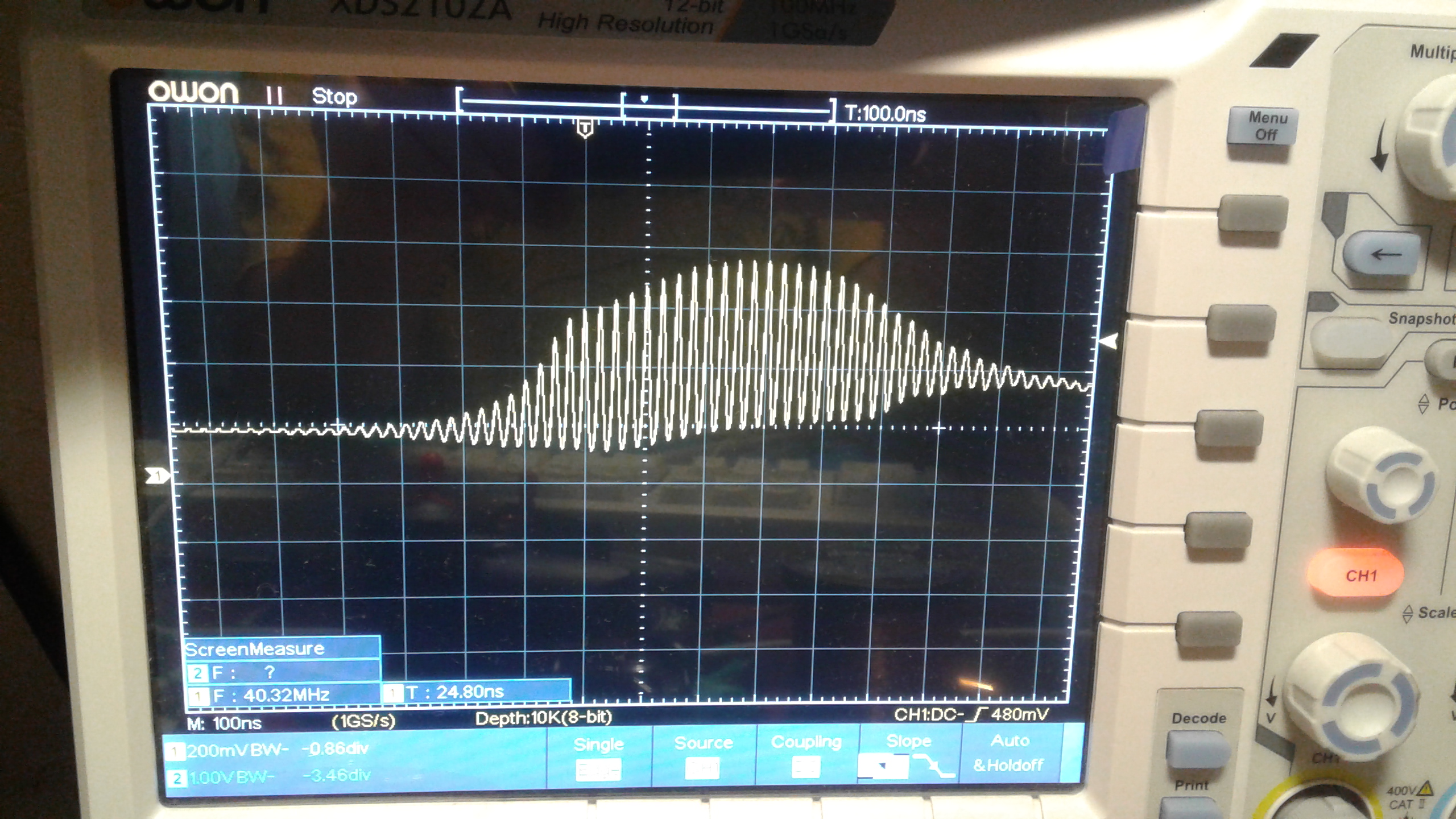
Сигнал на транзисторе рядом с антенной
Как только мы подстроили частоту, выходы F,B,L,R оживают. Изначально на них уровень "0". При нажатии на кнопки пульта на выходах устанавливается уровень питания.
Кстати, о питании. Я на плату управления подавал 8 вольт (2 Li-Ion аккумулятора) и она работала.
В итоге из платы управления и моторчиков дети собрали вот такую машинку на радиоуправлении

Прочитав этот пост загорелся и я идеей склепать свой самолетик. Взял готовые чертежи, заказал у китайцев моторчики, аккумуляторы и пропеллеры. А вот радиоуправление решил сделать самостоятельно, во-первых — так интереснее, во-вторых — надо себя чем-то занять пока посылка с остальными запчастями будет ехать, ну и в третьих — появилась возможность соригинальничать и добавить всяких плюшек.
Осторожно, картинки!
Как и чем управлять

Но ведь у большинства микроконтроллеров есть 16-битный (и больше) таймер для генерации ШИМ. Здесь проблема с дискретностью сразу пропадет еще и частоту можно точно выставить. Долго расписывать не буду, сразу даю табличку:
Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Многоканальное управление
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате. Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс. Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных. То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:
Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:
Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:
Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
затем инициализируем генератор ШИМа на таймере/счетчике1:
Остается реализовать прерывания:
Глобально разрешаем прерывания и готово, забивая в channels значения от LOW до HIGH изменяем значения на каналах.
Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
Спустя некоторое время появилась вот такая платка:
Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается радиомодуль HM-R868:
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через переходник к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться. Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора. С добавлением контрольной суммы в виде XOR слать команды с терминала стало напряжным, поэтому я побыстрому наклепал вот такую программку с ползунками:
Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:
Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот пост и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868. Преобразователь подключается 2м кабелем от принтера, что позволяет закрепить его на каком нибудь дереве или чем-то подобном.
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:

Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:
— проверить правдивость этой версии пока не представляется возможным. В пользу этой версии говорит и зафиксированная на видео попытка выровнять самолет — он летит накрененным, а потом резко заваливается в противоположную сторону (а должен плавно). Вот более наглядное видео:
Дальность действия аппаратуры — примерно 80м, дальше тоже ловит, но через раз.
Ну вот и все, благодарю за внимание. Надеюсь, приведенная информация окажется для кого-то полезной. Буду рад ответить на все вопросы.
В архиве схема и разводка платы для Протеуса.

Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Последние посетители 0 пользователей онлайн

Надеюсь автор понимает, что основой любой антенной решетки является либо идентичность ФЧХ излучателей, либо определенность ФЧХ для каждого излучателя. Ну и расстояние между центрами элементов в решетке не должно превышать половины длины волны. Напомню, что это звук, то есть длина волны для 2 кГц составит 16 см. Сиречь, половина - 8 см.
есть такое, т.к. часто выходят из строя инструменты, а ковырять "в полях" нет ни времени, ни сил, то накапливается хлам мешками. теперь собираю только макиты (хилти - на вечном ТО, уже оплачено и их сами сервисники забирают), разные боши, хитачи, метабо. в мусор, не целесообразен их ремонт, по теме: берут ещё в ремонт первые интерсколы, там, где начинка оригинальная (не помню чья, кажись японская), ВСЁ от 20 лет от интерскола - хлам китайский.

По моему, эту книгу ТС и "читает", только издание другое. Есть ещё один нюанс - автор предполагал использование популярных тогда наушников типа ТОН с сопротивлением в несколько кОм. Современные же имеют сопротивление в несколько десятков Ом. Подключив их к этому усилителю, вы ничего не услышите, даже если поймаете станцию. Как можно решить эту проблему, описано в последующих главах про усилители звука. Лучше всего сперва собрать и наладить 2 - 3 транзисторный УНЧ, добившись громкого и качественного звука в наушниках (подавая для проверки слабый сигнал, например, с плеера или телефона), а потом уже пробовать подключать его к детекторному приёмнику.
Реверсирование таких двигателей осуществляется сменой фазировки пусковой обмотки относительно рабочей. Надо разбираться со схемой станка, что за провода из него приходят и за что отвечают. Конденсаторы не помешало бы проверить, могут быть от них сюрпризы. На видео ниже точно такой же, по схеме, движок, только без брно.
Возможно двигатель коротит на корпус. Если корпус двигателя заземлён,то когда ноль на корпусе он работает,когда фаза то К.З. и авпомат выбиват. Переброской проводов питания, мне так кажется, не получится получить реверс.
Здравствуйте. Спасибо за схему, попробовал подключить так, но работает не так как ожидалось. Для двигателя предусмотрен переключатель реверса, который имеет три положения: вращение двигателя по часовой стрелке, нейтральное и вращение против часовой стрелки. На такой переключатель приходит 4 провода: 2 - 220 в и 2, отвечающих за смену направления вращения. Способ подключения - показал на рисунке. Проблема в том, что двигатель работает только в 1 определенном положении переключателя реверса. Работает достаточно тихо, гуда нет, вроде бы ничего не греется. НО при переключении реверса в другое направлении СРАЗУ ЖЕ срабатывает автомат. В чем ошибка подключения? КЗ в способе подключения нет, схему перепроверял.
поправляю. Вы утверждаете, что это компьютерный кулер ? И не понимаете принципиальной разницы с коллекторным мотором ? В таком случае, схема не годится. Выискивать блох вроде погашения несуществующих (на этих моторчиках) импульсов - вообще бессмысленно. Диод бесполезен, конденсатор в ключевой цепи - вреден. Еще посмотреть надо, что скажет вентилятор в ответ на подачу импульсов на него.
Читайте также: