
Бесполезная коробка лего инструкция
Обновлено: 15.05.2024
Конструктор LEGO WeDo - комплект Лего, разработанный специально для практики конструирования роботов начального уровня.
Данный набор позволит сконструировать и запрограммировать через компьютерное приложение первые действующие модели робототехники.
В набор LEGO WeDo входят 158 элементов , включая USB LEGO - коммутатор, мотор, датчик наклона и датчик расстояния.
Отлично подходит для организации работы в классе общеобразовательного учреждения или учреждения дополнительного образования детей.
Подробное описание конструктора we do
Конструктор LEGO Education WeDo дает ученикам возможность собрать и запрограммировать простые модели LEGO через приложения в компьютере.
В наборе более 150 элементов, в том числе двигатель, датчики движения и положения, а также LEGO USB Hub (коммутатор). Совмещая программное обеспечение и учебное пособие, можно выполнить 12 тематических заданий общим объемом в 24 часа. Учебное пособие приобретается отдельно.
Возможности конструирования и программирования:
- Сконструировать своего первого робота;
- Научить робота двигаться и управлять его движениями через компьютер;
- Написать свою первую программу;
- Пройти 12 основных (+5 бонусных) уроков-заданий технической и гуманитарной направленности;
- Получить огромный простор для творчества и экспериментов.


фото коробки базового набора Лего ВеДо 9580
Набор конструктора LEGO WeDo предназначен для знакомства с робототехникой в старших группах детского сада, начальной и средней школе. Программное обеспечение и обучающие материалы рассчитаны таким образом, что начать обучение вы можете в любой момент. Наиболее подходящий возраст учеников - 5-10 лет. Набор оптимизирован для работы совместно с педагогом, но ребята постарше могут работать с набором самостоятельно, выполняя содержание инструкций.
В обучающих материалах есть вся необходимая информация: инструкции по сборке базовых моделей и примеры программ. Для управления роботом предусмотрена программная среда с простым и понятным управлением. Для удобства учеников написание программного кода заменено программированием мышкой, для составления программы ученик меняет местами имеющиеся фрагменты команд и обращения к сигнальным датчикам.
Главное отличие WeDo от его старших "собратьев" - простые модели для сборки и потребность в подключении к компьютеру через USB-интерфейс. Набор знакомит с основными принципами работы с робототехникой - дальнейшее обучение проходит с набором EV3 или NXT.
Для продолжения обучения вы можете также приобрести у нашего спонсора (переходите по баннеру вверху):

Решив позабавить своих детей, друзей и знакомых, я сделал URoboBox.
Это моя версия легендарной коробки.
Наткнулся в сети на такую штуку:
И еще вариант продвинутый вариант от LEGO:
В интернете также нашел инструкцию как собрать самостоятельно URoboBox – бесполезную роботизированную коробку.
URoboBox – Useless Robotic Box (Бесполезная Роботизированная Коробка).
Коробочка получилась простая, с минимальной начинкой доступной каждому. Для тех, кто хочет сделать такую коробку, прилагаю подробную инструкцию по сборке и все необходимые файлы. Для начала давайте посмотрим что получилось.
URoboBox в действии:
URoboBox может работать в двух режимах, случайный выбор движений и по порядку.
Коробочка имеет 7 движений для отключения тумблера, можно добавлять свои движения.
Если рычаг по каким-то причинам не может выключить тумблер, то после трех попыток коробочка переходит в режим ожидания.
Работа продолжится после отключение тумблера вручную.
Далее идет часть для тех кто желает собрать такую коробочку самостоятельно.
Работа URoboBox изнутри:
Корпус и рычаг вырезаны лазером из фанеры толщиной 4 мм.
Вы можете использовать любой другой материал, например, пластик, оргстекло.
Но толщина материала не должна превышать 4 мм, в противном случае, вам придется изменить чертежи.
Чертежи нарисованы в программе CorelDRAW X6.
Следуйте инструкции и у вас всё получится.
ВНИМАНИЕ: Вовремя сборки внимательно смотрите на фотографии и располагайте детали именно так, как они расположены на фото.
Необходимые компоненты:
- Плата Arduino. Я использую Arduino Mega, вы можете использовать любую другую.
- Тумблер с двумя положениями. Диаметр втулки с резьбой не должен превышать 6 мм.
- Серво. Я использую TowerPro g9. Если вы будете использовать другие серво, вам придется изменить чертежи крепления серво.
- Элементы питания.
- Супер клей. Маленькие тюбики, желательно гель.
- Шесть маленьких саморезов диаметром до 2.5 мм.
- Сверло 2 мм, 1 мм. Дрель или шуруповерт.
Инструкция по сборке:
Крепление для Arduino.
- Возьмите необходимые детали. Расположите их точно также как на фото (рис. 1).
- Переверните боковую стенку, поставьте детали крепления (гантельки) в прямоугольные отверстия (рис. 2).
- Сделайте отметки с двух сторон у каждой «гантельки», примерно посередине, между прямоугольными отверстиями (рис. 2 и рис. 3).
- Поочередно, установите «гантельки» с обратной (внутренней стороны) и просверлите отверстия (сверло 2 мм) в местах указанных точками на рисунке (рис. 3). Сверлите таким образом, чтобы сверло вошло в стенку «гантельки» прямо по центру. Диаметр сверла зависит от диаметра самореза.
- Закрепите «гантельки» саморезами (рис. 4, рис. 5).
- Возьмите пластинку для крепления Arduino. Приложите к ней плату так, чтобы совпали отверстия для креплений. Отметьте где будет находиться гнездо USB и куда оно направлено (рис. 6).
- Нанесите клей на паз «гантелек» (рис. 7), приложите пластину крепления Ардуино к «гантелькам» и дождитесь пока она приклеится.







Вот что у вас должно получиться:
- Разложите детали так, как показано на фото (рис. 8). Синими стрелками указаны основные элементы деталей, убедитесь, что ваши детали лежат также.
- Склейте скотчем: дно, левый торец, заднюю стенку и правый торец (видео 2). Соблюдайте расположение деталей.
3. Нанесите клей на торцы пазов дна и передней стенки (рис. 9). Прижмите переднюю стенку и дождитесь высыхания клея. У вас должно получиться так (видео 3). - Склейте скотчем: дно, левый торец, переднюю стенку и правый торец. Нанесите клей на торцы пазов дна и задней стенки (рис. 10).
- Прижмите заднюю стенку соблюдая расположение деталей и дождитесь высыхания клея. Вот что у вас должно получиться (видео 4).
- Со стороны правого торца, намажьте клеем торцы пазов задней стенки, дна и передней стенки. Аккуратно вставьте правый торец в пазы и дождитесь засыхания клея.
- Левый торец приклеивать не нужно.



Вот что должно получится:
Левая верхняя крышка:
- Возьмите корпус, левую крышку и 2 крючка (рис. 11).
- Приклейте крючки. Крючок в корпусе должен быть направлен прорезью в сторону левого торца коробки. Крючок на крышке должен быть направлен прорезью в сторону правого торца (рис. 12), (рис. 13).
- Возьмите канцелярскую скрепку, распрямите её и откусите кусачками два куска по 3 см. Загните оба отрезка как показано на рисунке (рис. 14).
- Уберите стенку левого торца, приложите правую верхнюю крышка как показано на рисунке (рис. 13) и просверлите отверстие (сверло 1 мм) в указанных на картинке местах (рис. 15). Сверло должно пройти сквозь боковые стенки и в середину торца верхней крышки.
- Вставьте в просверленные отверстия скобы из канцелярской скрепки (рис. 16).
- Загните каждую скобу так, чтобы «свободный» конец был направлен внутрь корпуса (рис. 17).
- Возьмите резинку для денег, сложите её в двое, закрутите на нужное число оборотов и наденьте на крючки (рис. 18).
Вот что у вас должно получиться:
Крепление серво, рычага, тумблер, завершение сборки:
- Возьмите крепление для серво и сам сервопривод (рис. 19).
- Вставьте серво в прямоугольное отверстие, при этом вал серво должен быть ближе к верхнему краю крепления. Нижняя часть крепления обозначена отверстием (рис. 20, рис. 21). Закрепите серво шурупами или винтиками M2 (пример на фото), предварительно просверлив отверстия (сверло 2 мм).
- Возьмите две части рычага (рис. 22), склейте их или соедините винтиками (пример на фото). Прикрутите качалку от серво точно также, как на фото (рис. 23).
- Поставьте серво в положение 0 градусов и закрепите рычаг на серво. Прямая часть рычага должна быть направлена вниз (рис. 24).
- Возьмите тумблер, провода штекера и сопротивление 10 кОм. Припаяйте провода и сопротивление как на картинке (рис. 25).
- Закрепите тумблер в правой верхней крышке как на картинке (рис. 26).
- Если у вас не Arduino Mega, тогда изготовьте вот такой провод (рис. 27).
- Подключите все компоненты к ардуино, смотрите схему (рис. 28, рис. 29, рис. 30).
- Закрепите Ардуино. Установите крепление с серво таким образом, чтобы вал серво был направлен в сторону задней стенки. Блок с батареями можно разместить на стенке левого торца (рис. 31, рис. 32).
- Закрепите верхнюю правую крышку и левый торец при помощи шурупов. Предварительно, под шурупы просверлите отверстия (сверло 2 мм) (рис. 33).
Вот что у вас должно получиться:
Настройка программы:
Откройте код для URoboBox. В самом начале кода, вы увидите раздел настроек.
- Укажите пины на которых подключены серво (пин 3) и тумблер (пин 2).
- Укажите минимальное положение рычага, по умолчанию 10. Максимальное положение рычага, в диапазоне от 90 до 110. Укажите такой градус, при котором в максимальном положении рычаг будет выключать тумблер.
- Укажите пин для светодиода подсветки.
- Выберите режим работы URoboBox, 1 – Выбор движений в случайном порядке, 2 – Движения идут по порядку.
- Общее число движений. Измените это число, если вы добавляли свои движения, укажите общее число движений.
- Настройте движение Shake, читайте описание в коде.
Файлы проекта:
Код URoboBox для Arduino (СКАЧАТЬ)
Архив с файлом чертежей URoboBox для лазерной резки. Файл создан в программе CorelDRAW X6. (СКАЧАТЬ)
Робот-собака своими руками:
- Инструкция по сборке v1.0 (Набор EV3 31313): загрузить
- Инструкция по сборке v1.1 (Набор EV3 Education 45544+45560): загрузить
- EV3 Программа для Color Sensor RGB Block v1.00: смотреть далее
- EV3 Основная программа: смотреть далее
1. Описание
MindCub3r – робот, которого можно собрать из одного набора LEGO MINDSTORMS EV3 Обычная версия (31313) или из наборов EV3 Education Core и Expansion sets (45544+45560).
Этот робот способен полностью решить и правильно собрать известную головоломку Кубик Рубика (Rubik’s Cube puzzle).
Все программы для MindCub3r будут правильно работать с прошивкой LEGO firmware v1.06H (home) или v1.06E (Education), а также с последующими новыми версиями прошивок.
Рекомендуется всегда обновлять программное обеспечение центрального блока EV3 ( прошивку) до самой последней официальной версии от LEGO.
Аккуратно соберите робота по инструкции Инструкция по сборке (Обычная версия EV3 31313) или Инструкция по сборке (Образовательная версия EV3 Education 45544) , затем загрузите и установите программное обеспечение, как описано далее.
Программное обеспечение MindCub3r состоит из трех частей:
- Файл проекта: MindCub3r-v1p8.ev3 or MindCub3r-Ed-v1p8.ev3, который содержит программу управления моторами и сенсорами.
Она создана в стандартном визуальном редакторе программ и проектов LEGO MINDSTORMS EV3 - Дополнительная запускаемая программа: mc3solver-v1p8.rtf, которая написана на C++ и реализует более эффективный и быстрый алгоритм решения головоломки, чем тот, который использовался для предыдущей версии NXT MindCuber ( для набора LEGO NXT)
- Приложение для EV3: “MC3 Solver v1p8”, которое используется для запуска программы mc3solver-v1p8.rtf
The main program and mc3solver-v1p8.rtf executable program communicate with each other via shared files on the EV3.
Примечаниеe: Файл v1p8 использует расширение .rtf для возможности загрузки его в блок EV3 с помощью стандартного программного обеспечения LEGO MINDSTORMS EV3 для персонального компьютера.
Расширение .rtf , которое обычно используется для текстовых файлов, в данном случае применяется к запускаемой программе, в качестве альтернативы.
Пожалуйста, не открывайте этот файл с помощью обычного текстового редактора.
MindCub3r использует датчик EV3 color sensor (сенсор цвета) в режиме RGB, чтобы сделать возможным распознавание тех оттенков цветов, которые обычно не определяются в стандартном режиме сенсора, по умолчанию используемом в программном обеспечении LEGO MINDSTORMS EV3 .
Программа Color Sensor RGB Block должна быть импортирована в программное обеспечение LEGO MINDSTORMS EV3 для персонального компьютера, чтобы поддерживать режим RGB для сенсора.
2. Программное обеспечение
Примечание: Используйте ссылки Загрузить следующим образом:
- На Windows – клик правой кнопкой мыши на ссылке Загрузить
- На Mac – при нажатой клавише control(ctrl), кликните на ссылку Загрузить
- Сохранить ссылку как…
- Сохранить содержимое как…
- Загрузить содержимое ссылки как…
- Запустите программное обеспечение LEGO MINDSTORMS EV3 на персональном компьютере и создайте новый пустой проект.
- Найдите загруженный ранее файл ColorSensorRGB-v1.00.ev3b на вашем компьютере и нажмите Open(Открыть).
- Выберите ColorSensorRGB-v1.00.ev3b из списка Select Blocks to Import( Выбрать Блоки для Импорта) и нажмите Import(Импорт).
- Чтобы правильно завершить установку , нажмите Сlose (Закрыть) , а после этого также закройте программное обеспечение LEGO MINDSTORMS EV3 полностью.
- Файл проекта с основной программой MindCub3r-v1p8.ev3 или MindCub3r-Ed-v1p8.ev3 project file with the main program
- Запускаемый файл программы mc3solver-v1p8.rtf
- InstallMC3-v1p8.rbf – приложение для запуска файла mc3solver-v1p8.rtf
- Запустите программное обеспечение LEGO MINDSTORMS EV3 для персонального компьютера, выберите в меню команду File(Файл)
и затем выберите пункт Open Project( Открыть проект ). - Найдите файл проекта MindCub3r-v1p8.ev3 или MindCub3r-Ed-v1p8.ev3 и нажмите кнопку Open(Открыть).
- Download (Загрузить) – с помощью этой кнопки загрузите программу MindCub3r в блок EV3 (но пока не запускайте ее).
- Find the folder on the computer where the files were extracted from MindCub3r-v1p8.zip or MindCub3r-Ed-v1p8.zip. Select mc3solver-v1p8.rtf and Open to download this program to the EV3.
- Find the folder on the computer where the files were extracted from MindCub3r-v1p8.zip or MindCub3r-Ed-v1p8.zip. Select InstallMC3-v1p8.rbf and Open to download this file to the EV3.
- Press the right button on the EV3 to move to the File Navigation screen. Select the MindCub3r-v1p8 or MindCub3r-Ed-v1p8 folder and press the center button to open it. If there is a micro-SD card in the EV3, select and open the SD_Card folder first.
- Use the down button to Select InstallMC3-v1p8 and press the center button to run it. The EV3 will make a short beep.
This installs “MC3 Solver v1p8” application on the Brick Apps screen. - Turn off the EV3 brick to ensure all the files are saved to the flash memory and then turn it on again.
- Run the “MC3 Solver v1p8” application on the EV3 from the Brick Apps screen to start the mc3solver-v1p8.rtf executable program.
This is only necessary once each time the EV3 is turned on as the program will continue to run in the background until the EV3 is turned off. - Run the MindCub3r program on the EV3 from the Run Recent screen or from the File Navigation screen if it is the first time it has been run.
The program first resets the position of the scan arm (holding the color sensor) and then the tilt arm. If the turntable starts to rotate or the two arms do not move in this order, please carefully check that cables have been connected to the correct ports on the EV3 as shown by the color coding in the build instructions. During this period, the EV3 buttons flashes red.The program then connects to the mc3solver-v1p8.rtf program that was downloaded to the EV3. If the program is found, the EV3 makes a short beep and continues. If the solver program is not running, the buttons continues to flash red and the message “Find solver” is displayed on the EV3 screen. If this happens, please check that the “mc3solver-v1p8.rtf” program has been downloaded to the MindCub3r-v1p8 or MindCub3r-Ed-v1p8 project folder on the EV3 and that the “MC3 Solver v1p8” application has been installed and run once.When MindCub3r is ready to start, the EV3 buttons turn orange and the message “Insert cube…” is displayed on the screen. - Gently turn the turntable in each direction with your finger so that it moves slightly because of “play” in the gears connecting it to the motor. If necessary, adjust the position of the motor so that there is an equal mount of play in each direction. Use the left and right buttons on the EV3 to do this. A short press nudges the motor by a small angle. Holding the button for longer moves it by larger angles more quickly.
- Insert a scambled Rubik’s Cube into the turntable tray and MindCub3r will start to scan and solve the cube.MindCub3r may scan the cube up to three times if it is unable to determine the colors at first. If the scanned colors do not result in a valid pattern, MindCub3r will stop after the third attempt and display the message “Scan error” on the EV3 display. If this happens, there may be a number of possible causes. See the troubleshooting section.If there is a cube present before MindCub3r is ready, the buttons will stay red and the message “Remove cube…” is displayed for you to remove the cube. If this happens even when no cube is present or if MindCub3r does not start to scan the cube when it is inserted, please check that the cables to the infra red or ultrasonic and color sensors are connected to the correct ports on the EV3 as shown in by the color coding in the build instructions.
- MindCub3r is designed to work with an official Rubik’s Cube branded by Rubik’s. However, it should work with most cubes provided one set of stickers is white and the others are distinct colors. It is optimized to work with white, yellow, red, orange, green and blue stickers.
- Cubes with a white plastic body may scan less reliably that those with a black body but may work reasonably well if there are no other issues.
- A standard cube is about 57mm along each edge. MindCub3r will work most reliably with a cube this size although cubes that are only slightly larger or smaller may work. It has been known to solve some cubes as small as 55mm but not all.
- Make sure latest release of the MindCub3r software is installed including the latest enhanced firmware. Version v1p8 has some improvements in the position of the scan arm and the underlying algorithm for discriminating the colors.
- Check that the scan arm has been built exactly as shown in the build instructions. Small differences such as how the black 5-hole beams on either side of the scan arm are connected can alter the position of the color sensor during the scan or even jam the scan arm so it stops during the scan. In particular, if the color sensor looks as though it is over the edge of the cube or too close to the middle while scanning the corner or edge, please check the build instructions again.
- Make sure that the turntable is carefully aligned before inserting the cube as described here. This is required to ensure that the cube is positioned correcetly under the color sensor during the scan.
- Use new or well charged batteries as the reset position of the scan arm can be affected by low battery levels.
- Try the scan in dim lighting conditions as the color sensor can become saturated in bright lights.
- Try to bend the cable connecting the color sensor to the EV3 in its most natural direction (swap the two ends if necessary) and through the clip at the bottom of the scan arm to minimize any force that the cable applies to the position of the color sensor during the scan.
- Собственно коробочка. Ее можно сделать из дерева или фанеры.
- Микроконтроллер ATmega328P. Можно использовать и Ардуино, но она будет значительно быстрее сажать батарею.
- Тумблер.
- Два сервопривода. Я использую самые дешевые SG90.
- Батарейки/аккумулятор. Нам нужно 5-6 вольт.
- Полевой транзистор (у меня под рукой только IRF540, он вполне подходит).
- Сопротивление в несколько кОм, номинал особой роли не играет.
В появившемся меню выберите один вариант:
Затем выберите папку на вашем компьютере, куда вы собираетесь сохранить файл.
2.1 Установка Color Sensor RGB Block
-
блок, ColorSensorRGB-v1.00.ev3b, на ваш компьютер.
Иногда при загрузке этот файлe может быть переименован в ColorSensorRGB-v1.00.zip . В этом случае после загрузки, переименуйте его снова в ColorSensorRGB-v1.00.ev3b


2.2 Загрузка проекта MindCub3r
-
Загрузите соответствующий вашей системе файл на ваш компьютерe:
-
(Обычный набор EV3 31313) (Education набор EV3 45544+45560)





2.3 Install the MC3 Solver Application
MindCub3r is now ready to use!
3. Operation

4. Troubleshooting Tips
4.1 Scanning
If MindCub3r attempts to scan the cube 3 times and displays the message “Scan error” the following tips may help.
If this does not help, please upload a video showing a failing scan with close up views of the scan arm from different angles and the position of the color sensor over the cube as the scan arm moves and post a link on the MindCuber Facebook pageand I will try to help.
Like MindCuber on Facebook to share your experiences and help each other with troubleshooting.
Copyright © 2013-2015 David Gilday
LEGO and MINDSTORMS are trademarks of the LEGO Group
Rubik’s Cube is a trademark of Seven Towns Limited
Disclaimer: thoughts and opinions expressed here are my own (David Gilday)

Последнее время у меня в блоге одни микроконтроллеры, программаторы и загрузчики. Надо бы отвлечься и написать о чем-то, что можно собрать своими руками. Думаю, "бесполезная коробка" отлично подойдет для этого: эта забавная поделка обязательно понравится и ребенку, и взрослому, а сделать ее под силу каждому.
Необходимые компоненты
Прежде чем перейти к описанию изготовления бесполезной коробки я приведу несколько соображений, которых я придерживался. Во-первых, не хотелось бы устанавливать в такой игрушке дополнительный выключатель для управления ее питанием. То есть коробка должна быть всегда включена и готова к работе. Значит нужно позаботиться об энергосбережении в режиме ожидания. Поэтому желательно использовать именно отдельный микроконтроллер, а не Ардуино, так как он позволяет добиться значительного снижения энергопотребления. Я решил использовать ATmega328P с тактированием от внутреннего RC-генератора 8МГц. В режиме сна он потребляет менее 1мкА. Если вы планируете использовать Ардуино, то я бы порекомендовал Pro Mini 8MHz, из нее нужно выпаять светодиод-индикатор питания и запитать ее через пин 5V (в обход стабилизатора).
Если Ардуино / микроконтроллер можно перевести в режим энергосбережения, то картину портят сервоприводы: даже в режиме простоя они потребляют несколько миллиампер. Здесь-то и пригодится транзистор, с его помощью можно отключать питание сервоприводов пока микроконтроллер спит. Полевой транзистор удобен тем, что он управляется не током, а напряжением, потому весьма экономичен. Но, думаю, для этой задачи можно подобрать и биполярный транзистор.
Изготовление коробки
Для изготовления коробки подойдет фанера 6мм. Мне приятнее работать с деревом, поэтому я выстрогал дощечку указанной толщины из осины. Размеры коробки прикиньте сами, чтобы внутри уместились все компоненты. Главное требование: ширина коробки должна быть достаточной для размещения в ней сервопривода, чтобы его рычаг находился на одном уровне с тумблером, то есть посередине ширины коробки. Остальные размеры на ваше усмотрение.
Детали я выпилил на лобзиковом станке:
Рычаг, который выключает тумблер, я склеил из трех отдельных частей. Если делать его из фанеры, то он может быть и цельным. Чтобы определиться с размерами и формой рычага я установил тумблер в обрезке доски и приклеил к ней сервопривод на двусторонний скотч. Затем, соединив детали будущего рычага струбцинами, подобрал подходящую форму, чтобы он свободно поворачивался и доставал до тумблера:
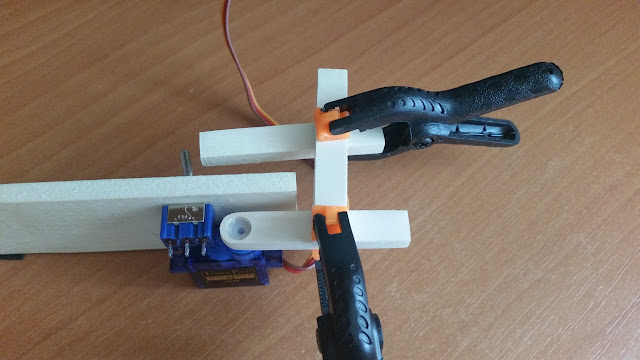 |
| Выбор подходящей формы для рычага |
Другой рычаг должен поднимать крышку, с его изготовлением нет ничего сложного. Можно было бы обойтись и пластиковым рычагом, что идет в комплекте с SG90, но он для этого коротковат.
Сами сервоприводы отлично держатся в коробке на двустороннем скотче.
Отдельно можно упомянуть о креплении рычагов к сервоприводам. К сервам хорошо подходят штатные пластиковые рычаги. Остается только соединить их с деревянными деталями. Я рассматривал разные варианты их соединения, в итоге остановился на следующем: в деревянной рейке просверлил отверстие для вала сервопривода и вырезал углубление по форме пластикового рычага. Вклеил в это углубление рычаг, сверху приклеил вторую рейку. Пластиковый рычаг оказался внутри деревянной "оправы". После высыхания клея я довел рычаг до ума на шлифовальном станке:
Петли для крышки я купил на Aliexress, у нас таких маленьких я не нашел. Чтобы крышка всегда была прикрыта, ее нужно подтянуть пружиной или резинкой:
И, наконец, дно коробки я посадил на винты. Гайки под них установлены по углам коробки. Можно использовать вместо них маленькие гвозди, кому как нравится.
Схема и питание коробки
Нам нужно управлять работой двух сервоприводов и отслеживать состояние тумблера. Для этого подключим их к микроконтроллеру по следующей схеме:
Эта же схема для тех, кто предпочитает Ардуино и схемы fritzing:
Отслеживать переключения тумблера удобно при помощи внешнего прерывания, поэтому он подключен к пину 2. Для управления сервоприводами нужны выводы, поддерживающие PWM, а для управления их питанием подойдет любой вывод. Я использовал пины 9, 10 и A5 для удобства разводки платы. Вы можете выбрать другие, внеся соответствующие изменения в скетч.
Для питания подойдут 4 "пальчиковые" батарейки. Учтите, что 6 вольт - это максимально допустимое напряжение для AVR микроконтроллеров, превышать его нельзя. А даташит и вовсе не рекомендует допускать длительную работу микроконтроллера при напряжении питания 6В. В режиме сна моя коробка потребляет около 0,2мкА. Я установил в нее щелочные батарейки, думаю, их хватит надолго.
Алгоритм работы и скетч
Алгоритм работы коробки можно описать примерно так:
2. По истечении времени ожидания отключаем питание сервоприводов и переводим микроконтроллер в спящий режим.
3. Выход из спящего режима возможен по внешнему прерыванию. Таким образом при переключении тумблера микроконтроллер проснется, включит питание сервоприводов и мы снова окажемся на пункте 1.
4.1 Если микроконтроллер только что вышел из сна, то переключаем тумблер без эффектов. Так незнакомый с коробкой человек сразу поймет ее смысл. Возвращаемся к пункту 1.
4.2.1 разнообразим поведение коробки эффектами (приоткрыть, похлопать крышкой и т.п.), после чего возвращаемся к пункту 4;
5. Опять же чтобы разнообразить поведение коробки, после каждого переключения тумблера засекается время реакции игрока. Если игрок несколько раз подряд переключает тумблер за короткий промежуток времени, то рычаг не убирается, крышка не закрывается, а коробка переключает тумблер без эффектов. Это происходит до тех пор, пока игрок не сбавит темп.
Скетч, реализующий описанное поведение, можно скачать здесь. Разумеется, нужно будет самостоятельно подобрать позиции для сервоприводов и вписать их в скетч.
А вот и видео с получившейся игрушкой:
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Робот-дракон включён в книгу рекордов Гиннесса

Южнокорейский робот будет пугать птиц лазерами и криками
Всем известно, что птицы представляют серьезную опасность для самолетов. Чтобы предотвратить столкновение пернатых с воздушными судами, южнокорейские специалисты из инсти.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Японские роботы полетят на Луну » роботы для связи и общения
Читайте также: