
Червячная передача лего ev3
Обновлено: 26.07.2024
Организация работы с LEGO MINDSTORMS Education EV3 базируется на принципе практического обучения. Обучающиеся сначала обдумывают, а затем создают различные модели. При этом активизация усвоения учебного материала достигается благодаря тому, что мозг и руки «работают вместе». При сборке моделей, дети не только выступают в качестве юных исследователей и инженеров. Они ещё и вовлечены в игровую деятельность.
преподаватели
- Семенова Алина Алексеевна
- Иванова Татьяна Григорьевна
Содержание программы
Модуль 1: Знакомство с деталями конструктора и программным обеспечением LEGO MINDSTORMS Education EV3.
Занятие 1: Вводное занятие. Инструктаж по технике безопасности
Занятие 2: Робототехника и её законы. Знакомство с деталями конструктора Lego MINDSTORMS Education EV3
Занятие 3: Робототехника и её законы. Знакомство с деталями конструктора Lego MINDSTORMS Education EV3
Занятие 4: Знакомство с микрокомпьютером EV3
Модуль 2: Сборка моделей базового набора LEGO MINDSTORMS Education EV3
Занятие 1: Сборка робота-пятиминутки. Среда программирования Lego MINDSTORMS Education EV3. Понятие алгоритма, основные блоки команд
Занятие 2: Сборка робота-пятиминутки с ультразвуковым датчиком
Занятие 3: Сборка робота-пятиминутки с ультразвуковым датчиком
Занятие 4: Сборка робота-пятиминутки с датчиком цвета/света. Калибровка датчика. Обнаружение черты
Занятие 5: Сборка робота-пятиминутки с датчиком цвета/света. Калибровка датчика. Обнаружение черты
Занятие 6: Сборка робота-пятиминутки с гироскопом
Занятие 7: Сборка робота-пятиминутки с гироскопом
Занятие 8: Сборка робота-пятиминутки с датчиком касания
Занятие 9: Сборка робота-пятиминутки с датчиком касания
Занятие 10: Сборка робота-пятиминутки с манипулятором «Подъемник»
Занятие 11: Сборка робота-пятиминутки с манипулятором «Захват»
Занятие 12: Соревнования по перемещению объектов
Занятие 13: Творческое задание
Модуль 3: Сборка моделей LEGO MINDSTORMS Education EV3
Занятие 1: Сборка простейшего робота «Плоттер Бот». Звуки модуля
Занятие 2: Световой индикатор состояния модуля. Экран модуля. Кнопки управления модулем
Занятие 3: Большой мотор. Средний мотор
Занятие 4: Способы передачи движения в технике. Зубчатые и ременные передачи
Занятие 5: Способы передачи движения в технике. Зубчатые и ременные передачи
Занятие 6: Повышающая и понижающая зубчатые передачи. Коронная зубчатая передача. Передаточное число
Занятие 7: Конструирование тележки с максимальным выигрышем в скорости. Гонки
Занятие 8: Конструирование тележки с максимальным выигрышем в силе. Сумо роботов
Занятие 9: Конструирование тележки с максимальным выигрышем в силе. Сумо роботов
Занятие 10: Повышающая и понижающая ременные передачи
Занятие 11: Червячная передача. Конструирование тягача. Перетягивание каната
Занятие 12: Самостоятельная творческая работа учащихся. Проект «Кегельринг»
Занятие 13: Самостоятельная творческая работа учащихся. Проект «Кегельринг»
Занятие 14: Самостоятельная творческая работа учащихся. Проект «Кегельринг»
Занятие 15: Равномерное движение вперед и назад
Занятие 16: Плавный поворот. Разворот на месте. Движение робота по квадрату
Занятие 17: Движение робота по треугольнику, прямоугольнику, пятиугольнику, окружности. Парковка
Занятие 18: Остановка у чёрной линии. Обнаружение черты разного цвета
Занятие 19: Движение по черной линии. Соревнования
Занятие 20: Остановка под углом. Расчет углов для движения робота по треугольнику, квадрату, пятиугольнику, шестиугольнику
Занятие 21: Определение расстояния. Остановка у объекта
Занятие 22: Самостоятельная творческая работа учащихся. Проект «Лабиринт»
Занятие 23: Самостоятельная творческая работа учащихся. Проект «Лабиринт»
Занятие 24: Самостоятельная творческая работа учащихся. Проект «Лабиринт»
Модуль 4: Конструирование + программирование в Scratch
Занятие 1: Линейный алгоритм
Занятие 2: Циклы
Занятие 3:Начальная расстановка
Занятие 5: Проект. Визитка
Занятие 6: Координаты
Занятие 7: Повороты и направление
Занятие 8: Вращение и градусы
Занятие 10: Проект. Мультфильм
Занятие 11: Условия и операторы выбора
Занятие 12: Изменение координат
Занятие 13: Процедуры
Занятие 14: Планирование игры
Занятие 15: Тестирование игр
Занятие 16: Презентация игр
Занятие 17: Логические оператор И/ИЛИ/НЕ
Занятие 18: Циклы с условием
Занятие 19: Случайные числа и диапазоны значений
Занятие 20: Области координат
Занятие 21: Переменные в циклах
Занятие 22: Типы данных и операторы
Занятие 23: Переменная как параметр
Занятие 24: Самостоятельная творческая работа учащихся
Занятие 25: Самостоятельная творческая работа учащихся
Занятие 26: Самостоятельная творческая работа учащихся
Занятие 27: Самостоятельная творческая работа учащихся
Итоговая аттестация - защита индивидуальных проектов
Цели программы
Развитие научно-технического и творческого потенциала личности ребёнка путём организации его деятельности в процессе интеграции начального инженерно-технического конструирования и основ робототехники.
Результат программы
- Иметь представление о способах программирования LEGO MINDSTORMS Education EV3;
- Иметь практические навыки работы c наборами LEGO MINDSTORMS Education EV3;
- Уметь самостоятельно собирать роботов требуемой конфигурации.
Особые условия проведения
Ограничения по возрасту с 9 до 12 лет.
Материально-техническая база
Наборы Lego MINDSTORMS Education EV3;
Программное обеспечение LEGO MINDSTORMS Education EV3;
Стационарный персональный компьютер;
Поля для соревнований.
Рекомендуем посмотреть
Развитие инженерно-конструкторского мышления учащихся на основе технической деятельности, навыков конструирования и программирования
Scratch — это простой, понятный и невероятно веселый язык программирования для детей. Всё, что требуется, — это умение читать и считать.
Знакомство ребят с киберпространством, его структурой, контентом, научатся различать типы источников, качество, достоверность контента.
Введение в кодирование и информатику путем создания и проектирования с использованием платы микроконтроллера micro:bit
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Аннотация . В статье рассматриваются основные возможности конструктора LEGO Mindstorms EV3 и его среды программирования. Изучение данного набора поможет сконструировать робопса таким образом, что поведение робота будет таким же как и у настоящей собаки.
Ключевые слова : конструктор, программирование, программное обеспечение.
Робототехника в современной среде набирает большие обороты. Каждый день появляются новые технологичные роботы и новые решения разных проблем в обществе. Все больше ребят знакомятся с этой наукой. Увеличивается количество кружков, где можно заниматься конструированием и программированием роботов. Существует огромное количество робототехнических конструкторов. Компания LEGO имеет свое решение в данной образовательной сфере. Это набор LEGO Mindstorms EV3.
Стоит отметить, что в наше время роботы могут не только заменять физический монотонный труд, но и быть полезными друзьями или даже питомцами. В детских магазинах часто можно встретить разные интерактивные игрушки, а также роботов питомцев. Например, робокошки, робособаки, роботы птицы и многое другое. Это удачное решение для тех людей, у которых есть аллергия на шерсть, но они очень хотят себе питомца. Так же такие животные не требуют питания, кроме как электричества.
Детям важно научится собирать роботов своими руками, уметь их программировать. Ведь робототехника может помочь нам в решении реальных проблем. Она учит анализировать природные процессы, визуализировать полезные навыки из жизни, которые можно применять в решении своих насущных вопросов.
LEGO Mindstorms — образовательный конструктор, предназначенный для разработки робота, и его программирования. LEGO Mindstorms EV3 была представлена в 2013 году.
Состав данного конструктора содержит в себе достаточное количество различных деталей. Поэтому их можно мысленно распределить по категориям. На рисунке 1 изображены разнообразные планки, служащие для конструкции своего рода скелетом или основой.
Для того, чтобы наши планки могли присоединяться друг к другу или к контроллеру и датчикам, используются соединительные элементы. Они тоже разные, например вытянутые детали с крестообразным сечением называют осями или штифтами. Они выполняют следующую роль: передают вращение от моторов к колесам и шестерням. Цилиндрические элементы с окружным сечением называются пинами. Также в группу к соединительным элементам можно отнести коннекторы. Они отвечают за объединение планок в различных плоскостях, изменение угла соединения деталей и подсоединение датчиков к роботу. (См. Рис. 2 и 3).
Рис 2. Соединительные элементы
Рис 3. Коннекторы
Следующая группа деталей - это шестерни, которые предназначены для передачи вращения от моторов к другим элементам конструкции робота. Эти круглые детали с зубчатыми концами применяются в самых разных конструкциях роботов, помогают двигаться механизмам, но могут быть использованы не только для вращения.
Так же конструктор содержит различные колеса и гусеницы служащие для движения робота в пространстве.
Рис 5. Колеса, гусеницы
От основных деталей перейдем к следующей группе, это различные моторы и датчики. В набор входят два больших сервомотора, которые выполняют роль мышц или силовых элементов нашего робота. Чаще всего данные моторы служат для передачи вращения на колеса, что обеспечивает движение робота. Для сравнения, моторы выполняют такую же функцию, как и человеческие ноги.
Рис 6. Большой сервомотор
В набор так же входит один средний мотор. Он легче, в нем чуть меньше мощности. Данный мотор нужен в качестве движущей силы. Его используют для навесного оборудования робота. Это могут быть разные клешни, модули захвата и манипуляторы. Можно сказать, что средний мотор выполняет те же функции, что и руки человека.
Рис 7. Средний сервомотор
Перейдем к датчикам. К ним относятся:
Эти датчики позволяют роботу анализировать информацию с окружающего мира. По аналогии с человеком, эти приборы можно сравнить со зрением. Правда роботы видят мир иначе, чем мы, поэтому главной задачей программиста становится извлечение и анализ информации, которая поступает с датчиков. Следующая не менее важная задача-это подача верных команд на моторы, чтобы робот мог выполнить определенные действия, которые мы ему запрограммируем. Рассмотрим функции наших датчиков. Ультразвуковой датчик позволяет измерять расстояние до объектов. Его работу можно сравнить с эхолокацией летучей мыши, ведь датчик также подает ультразвуковые волны. Потом они возвращаются, отражаются от объектов. Это помогает измерить точное расстояние. Датчик видит предметы в пределах 2,5 метров. Следующий датчик касания позволяет роботу реагировать на касания. Он распознает три ситуации: кнопка нажата, опущена и щелчок. Датчик способен определять количество нажатий, как одиночных, так и множественных. Датчик цвета дает возможность роботу определять цвет поднесенного к нему предмета, измеряет степень освещенности, рассеянный свет и отраженный свет.
Самым важным элементом конструктора является контроллер. Именно к нему подсоединяются моторы и датчики при помощи кабелей. Контроллер- это, по сути, мозг нашего робота. Это командный центр, здесь выполняется программа, анализируется вся информация с датчиков, передается информация и дальнейшее указание моторам.
Рис 9. Микроконтроллер
Также в набор входят соединительные кабели и USB провод.
Изучив детали конструктора, мы понимаем, что для создания робота и его программы, необходимо хорошо понимать суть работы каждого датчика. Все эти знания дадут нам возможность правильно рассчитывать траекторию движения робота, его функциональные особенности.
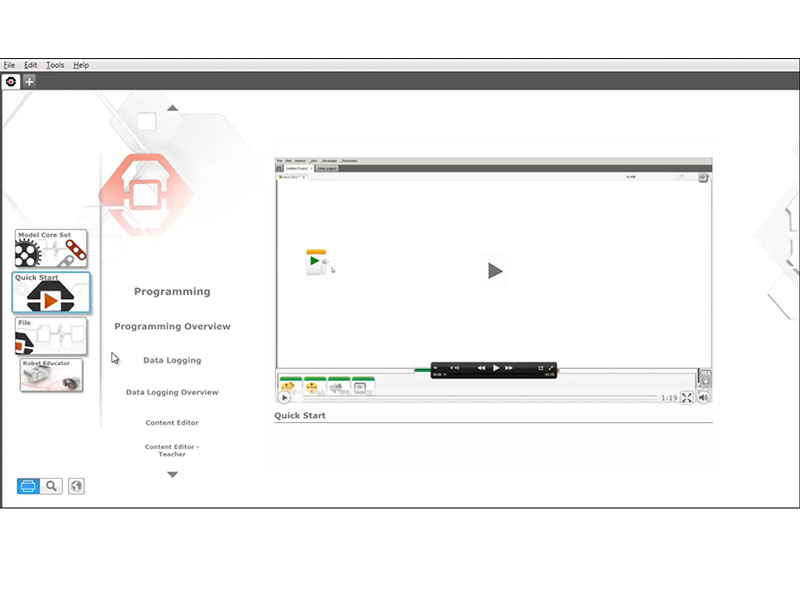
Разобравшись с деталями набора, рассмотрим его программное обеспечение. Мы будем использовать LEGO MINDSTORMS Education EV3. Это графический язык программирования. Программирование осуществляется путем перетаскивания разноцветных командных блоков.
Рис 10. Среда программирования
Таким образом, чтобы писать программы, следует размещать блоки функциональности на схеме. В зависимости от типа блока, каждый блок может быть сконфигурирован. Например, «Средний Мотор» имеет 5 режимов работы:
2. включить и вращать,
3. включить в течение определенного количества секунд,
4. включить и повернуть на определенный градус,
5. включить и повернуть фиксированное число раз.
Есть широкий спектр программных блоков на выбор. Они сгруппированы в шесть категорий:
1. действие (зеленый),
2. управление потоком (оранжевый),
3. датчики (желтый),
4. операции над данными (красный),
5. дополнительные (синий),
6. мои Блоки (циановый).
Интуитивно понятный интерфейс позволяет сначала создавать простые программы, а затем продуктивно развивать свои навыки программирования, делая возможным создание сложных многоуровневых программ и проведения различной экспериментальной работы.
Перед тем, как начать создавать робота пса на основе конструктора Mindstorms EV3, разделим свою работу на несколько этапов:
Ø составление задачи: какие действия должен выполнить робот;
Ø самостоятельная сборка робота;
Ø программирование робота на ПК согласно условиям задачи;
Ø выгрузка материала непосредственно в робота;
Задача робота показать максимальное поведение настоящей собаки, он должен поднимать голову, вставать на лапы, издавать характерные звуки, показывать анимацию.
Следующий этап работы - это сборка робота. На сайте LEGO в свободном доступе есть множество инструкций. На рисунке вы можете увидеть собранную модель робопса. В его конструкцию входят 2 больших сервомотора, которые берут на себя функцию ног. Средний сервомотор поднимает его голову. В этом помогает зубчатая передача и червячная передача. Так же к контроллеру подсоединен датчик цвета, который будем использовать, чтобы дать ему косточку. Датчик касания располагается на спине, чтобы пес чувствовал, когда мы будем его касаться.
Следующий этап-это программирования робота в среде Lego Mindstorms EV3 на ПК. Чтобы осуществить поставленную задачу, необходимо прибегнуть к методу исследования под названием «эксперимент». Чтобы робот был способен выполнить весь комплекс действий, согласно поставленной задаче, нужно прописать в программе всю цепочку действий, каждый шаг, каждое движение. Иллюстрация полученной программы представлена в приложении.
Выгрузка материала непосредственно в робота . Подключение робота к ПК осуществляется нескольким способами: через порт USB, Bluetooth соединение или Wi-Fi соединение. Используем порт USB , т.к. в этом случае робот привязан к компьютеру и программу на выполнение можно запускать прямо из среды программирования. Кроме того, во время выполнения программы появляется возможность визуально контролировать ход её выполнения (заголовки выполняющихся в данный момент программных блоков будут мерцать), можем отслеживать на компьютере. Также можно наблюдать текущие показания датчиков всё время, пока робот остается подключенным к среде программирования.
Таким образом, благодаря выбранной технологии передачи данных, готовая программа загрузилась просто и очень быстро.
Проверка проделанной работы.
Органично сконструированная роботизированная собака, после загруженной в неё программы, выполнила все действия, согласно изложенным условиям.
1. Клаузен, П. Компьютеры и роботы [Текст] / Пер. с нем. С.И. Деркунской. – Москва: Мир книги, 2019. – 48 с.
2. Копосов, Д.Г. Первый шаг в робототехнику: практикум для 5-6-го классов [Текст]: учеб. пособие / Д.Г. Копосов. - Москва: Бином. Лаборатория знаний, 2018. – 286 с.
3. Овсяницкая, Л.Ю. Курс программирования робота EV3 в среде Lego Mindstorms EV3 [Текст]: учеб. пособие / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий - 2-е изд., перераб. и доп. – Москва.: Изд-во «Перо», 2016. – 300 с.
4. Промышленная робототехника [Текст]: учеб. пособие / А.В. Бабич [и др.]. – Москва: Машиностроение, 1982. – 415 с.
5. Русецкий, А.Ю. В мире роботов [Текст]: Кн. для учащихся / А.Ю. Русецкий – Москва: Просвещение, 1990. – 160 с.
6. Филиппов, С.А. Робототехника для детей и родителей [Текст]: научное издание / С.А. Филиппов – 3-е изд., перераб. и испр. — СПб.: Наука, 2010. – 319 с.

Червячной передачей называется механизм, служащий для преобразования вращательного движения между валами со скрещивающимися осями. Обычно червячная передача состоит из червяка и сопряженного с ним червячного колеса.
Угол скрещивания осей обычно равен 90°. Червячные передачи относятся к передачам с зацеплением, в которых движение осуществляется по принципу винтовой пары. Поэтому червячные передачи относят к категории зубчато-винтовых. Обычно ведущее звено червячной передачи – червяк, но существуют механизмы, в которых ведущим звеном является червячное колесо.
Достоинства червячных передач: компактность конструкции и возможность получения больших передаточных чисел в одноступенчатой передаче (до U = 300 и более); высокая кинематическая точность и повышенная плавность работы; малая интенсивность шума и виброактивности; возможность обеспечения самоторможения.
В данной работе показывается какого большое значение червячных передач в Lego наборах, что можно сделать из них и в чем заключаются различия между их видами.
Задача этого проекта заключается в показе всей важности червячных передач в Lego наборах, их пользе и помощи в развитии детей в разных возрастах.
1.1 Классификация червячных передач.
Червячная передача – это передача, два подвижных звена которой, червяк и червячное колесо, образуют совместно высшую зубчато-винтовую кинематическую пару, а с третьим, неподвижным звеном, низшие вращательные кинематические пары.

Рис. 1. Червячная передача: 1 – червяк; 2 – червячное колесо.
Как следует из определения, червячная передача обладает свойствами как зубчатой (червячное колесо на своем ободе несет зубчатый венец), так и винтовой (червяк имеет форму винта) передач. Червячная передача, так же как и винтовая, характеризуется относительно высокими скоростями скольжения витков червяка по зубьям червячного колеса.
Классификация червячных передач:
По направлению линии витка червяка:
правые (при наблюдении с торца червяка и его вращении по часовой стрелке червяк вкручивается в пространство - уходит от наблюдателя);
левые (при наблюдении с торца червяка и его вращении по часовой стрелке червяк выкручивается из пространства - идёт на наблюдателя);
По числу заходов червяка:
с однозаходным червяком, имеющим один гребень, расположенный по винтовой линии, наложенной на делительный цилиндр червяка;
с двух-, трёх-, четырёх-, многозаходным червяком, имеющим соответственно 2, 3, 4 или более одинаковых гребней расположенных по винтовой линии, наложенной на делительный цилиндр червяка;
По форме делительной поверхности червяка:
с цилиндрическим червяком (образующая делительной поверхности – прямая линия);
с глобоидным червяком (образующая делительной поверхности – дуга окружности, совпадающая с окружностью делительной поверхности червячного колеса);
По положению червяка относительно червячного колеса:
нижним расположением червяка;
с верхним расположением червяка;
с боковым расположением червяка;
По пространственному положению вала червячного колеса:
с горизонтальным валом червячного колеса;
с вертикальным валом червячного колеса;
По форме боковой (рабочей) поверхности витка червяка:
с архимедовым червяком, боковая поверхность его витков очерчена прямой линией в продольно-диаметральном сечении (обозначается ZA);
с конволютным червяком, боковая поверхность его витков очерчена прямой линией в нормальном к направлению витков сечении (обозначается ZN);
с эвольвентным червяком, боковая поверхность его витков в продольно-диаметральном сечении очерчена эвольвентой (обозначается ZI).
1.2 Применение червячных передач
Червячная передача главным образом применяется в червячных редукторах.
Достаточно часто червячные передачи используются в системах регулировки и управления — самоторможение обеспечивает фиксацию положения, а большое передаточное отношение позволяет достичь высокой точности регулирования (управления) и(или) использовать низкомоментные двигатели. Весьма распространенное применение пары типа «глобоидальный червяк с роликовым сектором» — рулевое управление автомобилей.
Благодаря этим же характеристикам червячные передачи и червячные редукторы широко применяются в подъёмно-транспортных машинах и механизмах (например, лебёдках).
Часто в виде червячной пары изготавливаются механизмы натяжения струн (колковая механика) музыкальных инструментов, например, гитары. В данном применении полезным оказывается эффект самоторможения (необратимость).
1.3 Червячная передача в LEGO
Червячный редуктор - шестерня с рядом уникальных свойств. Во-первых, это не может быть только в качестве ведущего зубчатого колеса, никогда как ведомой шестерней. Это очень удобно для механизмов, которые должны, например, поднимаю что-то и сохранить его поднял, в этом случае червячные действует как замок, который держит нужную часть механизма поднял, не подвергая свою нагрузку на двигатель. Существует много возможных применений имущества этого червячной передачи в, например многие виды кранов или погрузчиков, железнодорожных барьеров, разводных мостов, лебедок, и в основном каждый механизм, который должен держать что-то устойчивое, как только двигатель останавливается.
Во-вторых, червячный редуктор является чрезвычайно эффективным для понижающее. Это более эффективно теоретически 8 раз, что передача 8 зубов, потому что каждый оборот червячного колеса вращает ведомый передачу, только один зубов. Поэтому червячные передачи используются для понижающее всякий раз, когда есть очень высокий крутящий момент или низкая скорость необходимо, и есть мало места для использования.
Наконец, как червячное колесо вращается, он имеет тенденцию толкать против ведомой шестерней и скользят по его собственной оси. Обычно эта тенденция должна быть остановлена сильным корпусом вокруг червячного колеса, но есть определенные механизмы, которые используют его для перемещения червячной передачи с одного места на другое, например мой пневматический AutoValve или мой автоматизированной системы trafficators .
Червячная передача может быть использована со всеми перечисленными передач. Наиболее часто используемым методом является сетка его с 24 зубьев зубчатого колеса:

Но это может быть легко использована с любым другим зубчатым колесом. Вы можете увидеть некоторые примеры червячных передач закрытых с приверженцем передач внутри сильных корпусов здесь. При правильном интервала, он может быть использован с коническими зубчатыми колесами слишком:

На приведенной выше диаграмме, есть два 12 зубов двойные шестерни конические, используемые. Но это может быть только один двойной конической шестерни или две односпальные передач конические, или даже одинокий коническая шестерня. Можно даже использовать червячной передачи для привода стеллажи, которые могут привести, например, в очень компактный бум расширения механизма:

Конструктор LEGO Education Wedo 1.0 «Гоночный автомобиль»



2. 3 D модель «Гоночный автомобиль»

Сборка червячной передачи из Lego наборов помогает понять основные принципы конструирования простых механизмов, а также разобраться в их полезности.
В этой работе мы выполнили основную задачу - увидели плюсы применения червячной передачи в Lego наборах и рассмотрели все их виды, а также узнали где они применяются в обычной жизни.
Актуальность же, данного проекта, заключается в том, что червячные передачи, подобные тем, которые можно собрать из Lego присутствуют в быту, но мы их не замечаем. После представления данного проекта, надеюсь, многие поймут всю значимость тех материалов, задействованных в нем и станут более внимательными к червячным передачам, используемых вокруг нас.
![]()
Механические передачи на Lego WeDo 2.0
- Автор записи: Дело Техники
- Запись опубликована: 23.10.2018
- Рубрика записи Робототехника
- Комментарии к записи: 1 комментарий
Одна из самых примечательных ячеек образовательного набора Lego WeDo 2.0 содержит детали, которые были заимствованы из серии конструкторов Lego Technic: цилиндрические, конические и двойные конические зубчатые колеса, зубчатые рейки, червячное колесо (вовсе не колесо по своей сути!) и кейс для червячного редуктора. Всё это многообразие деталей позволяет создавать модели с механическими передачами.

В рамках настоящей статьи предлагаем ознакомиться с базовыми механическими передачами, которые можно собрать, используя детали набора Lego WeDo 2.0. И прежде чем мы перейдем к их рассмотрению, хочется отметить, что до появления подобных образовательных конструкторов познакомиться с данными передачами можно было только в рамках курса специальной дисциплины «Детали машин» в университете или колледже. Сейчас же у детей есть уникальная возможность познакомиться с принципом работы большинства устройств, которые встречаются нам в повседневной жизни – от коробки передач автомобиля до лифта!
Цилиндрическая передача Lego WeDo 2.0
В наборе есть два зубчатых колеса (шестеренки) на 24 зубья, а также 4 шестерёнки на 8 зубьев. Все шестеренки имеют серый цвет. Особенность цилиндрических шестеренок заключается в том, что они могут передавать вращение в одной плоскости, то есть оси вращения, на которых установлены шестеренки должны быть параллельны. В возрасте 7-8 лет ребята знакомятся с одноступенчатыми цилиндрическими передачами, а затем осваивают и принцип построения многоступенчатых (каскадных) редукторов.
Коническая передача Lego WeDo 2.0
Конические зубчатые колеса представлены в наборе в следующем составе: две конические шестерни на 20 зубьев (бежевого цвета), двойное коническое колесо на 12 зубьев – 2 шт. и на 20 зубьев – 2 шт. Последние четыре конические колеса имеют черный цвет. Итого шесть конических шестеренок! Особенность конической передачи заключается в том, что вращение может передаваться в разных плоскостях, то есть оси вращения, на которых установлены шестеренки могут пересекаться под различными углами. Самый популярный вариант – это взаимно перпендикулярное расположение осей, т.е. угол между ними равняется 90º.
Червячная передача Lego WeDo 2.0
Одна из самых любимых передач у ребят в нашей секции – это червячная. Во-первых, название у передачи более чем запоминающееся, а во-вторых, разработчики конструктора предусмотрели специальный кейс для червячного редуктора – поэтому сложностей по сборке такой передачи не возникает. В то же время в конструкторе Lego Mindstorms EV3 специального кейса не предусмотрено и ребятам приходится собирать червячный редуктор «с нуля». Помимо специального кейса в наборе есть и основой элемент – «червяк», деталь напоминающая всем своим видом Архимедов винт. В зацепление с червяком оказывается цилиндрическая шестеренка (24 зубья). Таким образом, сам по себе червячный редуктор является зубчато-винтовым механизмом, оси валов при этом скрещиваются под углом 90º. Важная особенность червячной передачи – однонаправленность действия – мы можем передавать вращение от червяка к зубчатому колесу, и не можем наоборот, поскольку в этом случае зубья шестеренки стопорятся о витки неподвижного червяка.

Робототехнический конструктор LEGO Mindstorms считается одним из самых распространенных в мире. К моменту написания статьи компания LEGO выпустила конструкторы третьего поколения –EV3 (предшественниками были серии RCX и NXT). О том, как происходила робототехническая эволюция серии Mindstorms можно подробнее прочитать в статье «История образовательного конструктора LEGO Education»
В свою очередь, серия Mindstorms EV3 включает в себя две версии – Home и Education. Как несложно догадаться, версия Home ориентирована на частное использование, в то время как Education предназначается для освоения робототехники в рамках кружков и секций (к слову последнее пятилетие наблюдается бум секций робототехники в России).
Не важно, держите ли вы в руках самый первый конструктор RCX или последнюю версию EV3, концепция конструктора не менялась с годами. Набор состоял и состоит из двух частей, первая из которых – это детали серии LEGO Technic (позволяющие собрать разнообразные модели роботов и не только), а вторая – электронные компоненты (моторы и датчики) «во главе» с контроллером, с помощью которого происходит программирование робота и управление электронными модулями. Одна из причин, по которой конструктор получил такую повсеместную известность – это достаточно понятная для освоения графическая среда программирования.
Пожалуй, для вступительного слова достаточно, поэтому перейдем к рассмотрению «начинки» и функциональных возможностей обоих версий EV3 в сравнении друг с другом (в будущем будут выпущены детальные обзоры, посвященные каждому набору).
Официальные названия конструкторов, включая цифровой артикул:
- LEGO Mindstorms EV3 Home (31313)
- LEGO Mindstorms EV3 Education Core Set (45544)
1. Упаковка
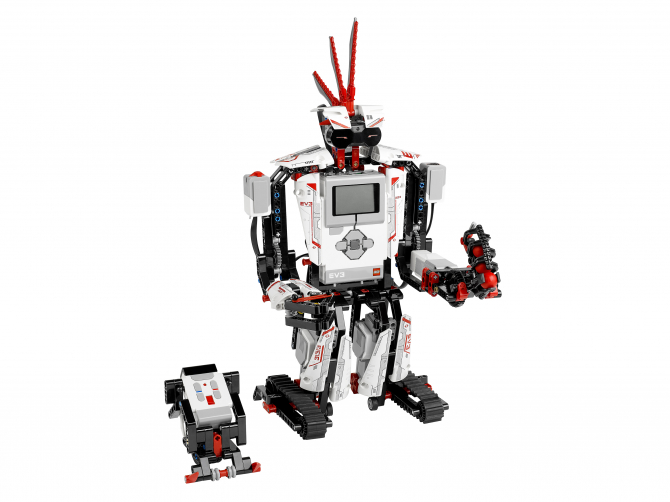
Версия для домашнего использования EV3 31313 упакована в классическую картонную упаковку, характерную для большинства наборов Lego. Ставка компании сделана на дизайн упаковки – на ней изображен крупным планом и во всей своей красе робот-андроид EV3RSTORM. Изображение дает покупателю общее представление о возможностях набора и его составе. Также стимулирует к покупке слоган «Create&Command your own robots» / «Создай и управляй своими роботами».
Однако несмотря на удачную маркетинговую стратегию такой упаковки, покупатель сталкивается с трудностями при хранении деталей набора.

В то же время образовательная версия идёт в комплекте с удобным и вместительным пластиковым контейнером. В дополнение к самому контейнеру предусмотрен специальный лоток для сортировки деталей по их назначению и размеру. А в нижней части достаточно места для хранения крупных деталей и электронных компонентов. Неоспоримый плюс заключается в том, что все детали имеют своё определенное место – на внутренних стенках отсека лотка можно найти наклейку с «местными» деталями. Подобный порядок в размещении деталей позволяет ускорить процесс сборки, так как дети спустя несколько занятий отлично ориентируются в ячейках и знают, где лежит определенная деталь.

Очевидно, что хранить детали в отдельном контейнере удобнее, чем россыпью, поэтому если вы владелец версии EV3 Home 31313, то обязательно приобретите отдельно специальный лоток.
2. Состав набора (детали Lego)
Оба набора представлены широким набором, так называемых «строительных» деталей, преимущественно серии Technic. Но при тщательном рассмотрении можно увидеть отличия – по составу, количеству и цветовой гамме.
«Домашняя» версия EV3 Home 31313 содержит 601 деталь. Доминирующий цвет деталей – черный, контраст добавляет красный цвет, а часть деталей серого цвета. Также в наборе есть декоративные элементы белого цвета, которые придают роботам более «эффектный» внешний вид (в комплекте к набору идут наклейки для этих белых панелей).
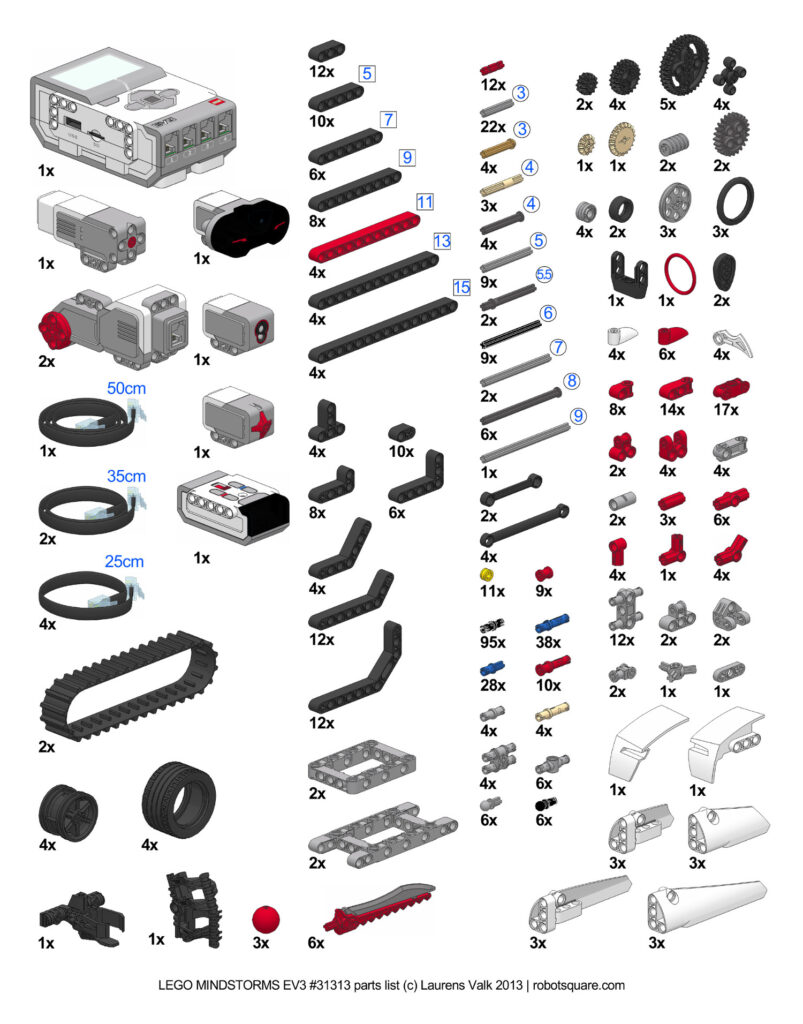
Преобладают среди строительных элементов балки (прямые и угловые), однако отсутствуют балки цветов, которые бы распознавал датчик цвета (синие, желтые, зеленые). Максимальная длина осей из домашней версии EV3 – 9 модулей. Соединительные элементы достаточно разнообразны: шесть типов штифтов и 21 тип деталей серии Technic. Зубчатых колес в наборе 8 типов, в сумме 21 шестерня, большая часть из которых – конические.
Из движителей – четыре колеса среднего диаметра и резиновые гусеницы, обеспечивающие достаточно хорошее сцепление с поверхностью. Однако со временем гусеницы могут быть растянуты, что приведет к проскальзыванию при движении.
В дополнение к декоративным деталям (отвечающим за эффектность робота) есть специальная обойма с 3 красными шарами – для поражения роботов-неприятелей или стрельбы по мишеням. Ещё одни «непрактичные» детали – мечи, в количестве аж 6 шт.
Рассмотрим образовательную версию EV3 Education Core Set 45544. Деталей заявлено меньшее количество – 541 штука. Но если исключить все декоративные элементы из версии 31313, то мы получим близкие друг к другу значения. Основные цвета – серый и белый, и лишь некоторые детали представлены черным и красным цветами.
Также, как и в домашней версии имеется множество таких деталей как балки и угловые балки, а также прямые трехмодульные балки 5 разных цветов — красный, зеленый, синий, желтый, черный для реализации алгоритмов с распознаванием цвета. Максимальная длина осей – 12 модулей (оси длиннее, чем в Home). Для соединения имеется семь типов штифтов и 18 типов деталей серии Technic. Зубчатые колеса в наборе представлены в количестве 30 деталей, причем пропорции цилиндрических и конических шестерен близки. А также есть уникальный элемент – поворотная зубчатая платформа.
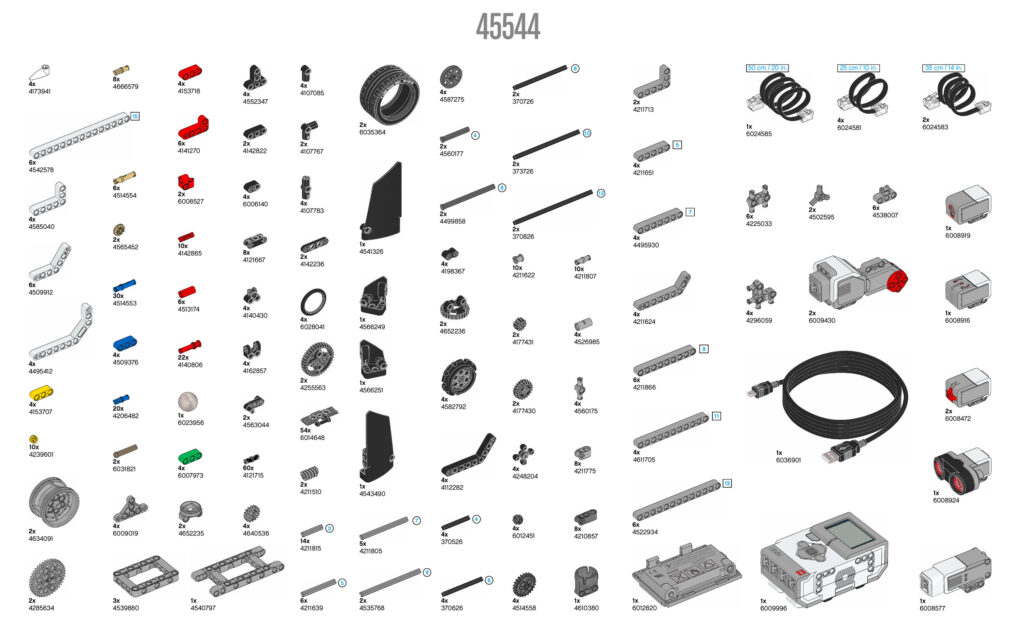
Из движителей – два больших колеса, шаровая опора с металлическим шаром (отличительный элемент образовательной версии), гусеничный привод (54 трака гусениц и специальные колеса-«звездочки»). По сравнению с резиновым приводом можно отметить меньшее сцепление с поверхностью, но этот вопрос можно решить установкой в звенья гусениц специальные резиновые вставки (например, из ресурсного набора 45560).
Декоративных деталей нет в таком количестве, но всё же разработчики добавили четыре панели серии Technic.
Если подвести итог, то с точки зрения элементной базы обе версии схожи, но по своему составу за счет уникальных элементов, таких как шаровая опора, поворотная платформа, отдельные звенья гусениц и др., с небольшим перевесом выигрывает версия EV3 Education Core Set 45544.
3. Состав набора (электронные компоненты)
Перейдем к рассмотрению одной из самых основных составляющих наборов (обоих версий) – электронные элементы. Как будет понятно ниже, принципиальных отличий в электронной базе не так много, поэтому подчеркнем общие для обоих версий компоненты, и больше внимания обратим на отличительные особенности.
3.1 Блок EV3 (EV3 Brick)
По сути своей блок EV3 является микроконтроллером на базе процессора ARM9 с ОС Linux. Он оснащен дисплеем, кнопками управления, динамиком, 4 портами для подключения сенсоров, 4 портами для подключения моторов, потами miniUSB и USB, а также слотом для карт MicroSD (до 32 ГБ). Связь с блоком EV3 возможна через USB-кабель, а также через встроенные модули Bluetooth или WiFi (при подключении внешнего модуля WiFi к USB-порту блока).

Автономность блока EV3 обеспечивается питанием от шести батареек типа АА, либо с помощью специализированного аккумулятора от Lego. К слову аккумулятор идёт в комплекте с образовательной версией, и отсутствует в домашней (но и здесь её небольшой минус – для зарядки потребуется купить отдельное зарядное устройство).
3.2 Моторы (Motors)
Обе версии EV3 укомплектованы одинаковым наборов моторов – два больших и один средний. Все три мотора имеют встроенный датчик вращения (энкодер), что позволяет управлять вращением с неплохой точностью – до 1 градуса. Как правило, большие моторы используются для задания движения роботу, а средний мотор – для выполнения вспомогательных операций.

3.3 Датчики (Sensors)
Версия 31313
Версия 45544
3.3.1 Датчик касания (Touch sensor)
Датчик касания входит в комплект обоих версий, однако в домашней – датчик всего один, а в образовательной 2шт. К слову кнопки на блоке EV3 тоже по своей сути – датчики касания. Как правило, датчик используется для запуска или остановки робота, подсчета количества нажатий.
3.3.2 Датчик цвета (Color sensor)
Датчик цвета также есть в обоих наборах. Распознает несколько оттенков цвета (разработчик заявляет до 8 цветов), а также может работать в режимах измерения интенсивности освещённости и степени отраженного света.
3.3.3 Гироскоп (Gyro sensor)
Гироскоп включен только в состав образовательной версии. Позволяет измерять угловое положение и определять положение робота по всем осям вращения. Основное применение – создание балансирующих роботов (один из самых известных – Gyro Boy), а также помогает определять крен робота.
3.3.4 Датчик расстояния (Distance sensor)
Датчики расстояния есть как в Home, так и в Education версиях, однако по своей физической природе измерения расстояния они отличаются друг от друга.
В образовательную версию входит ультразвуковой датчик. Принцип измерения заключается в генерации ультразвуковых волн, которые при столкновении с препятствием отражаются и возвращаются к датчику. Время, прошедшее между генерацией и возвращением сигнала, используется для оценки расстояния до препятствия. Диапазон измерения составляет от 1 до 250 см.
В домашнюю версию входит инфракрасный датчик. Сам принцип измерения идентичен, только вместо ультразвуковых волн, датчик генерирует инфракрасное излучение. Измерения при этом получаются менее точными, даже цвет объекта влияет на измерение. В свою очередь, разработчики определяют этот сенсор, как датчик некоей «близости» к объекту. Диапазон измерения составляет от 1 до 70 см. В то же время основная функция данного датчика – не измерять расстояние, а принимать сигналы от пульта дистанционного управления, который также использует ИК-технологию для связи.
3.3.5 Удаленный контроль (IR-Remote control)
Пульт для дистанционного управления с ИК-технологией (Infrared или IR) входит только в домашнюю версию EV3 (название он получил ИК-Маяк). Для управления роботом на пульте есть 5 программируемых кнопок (а если учесть их комбинации – то получится 11 программируемых действий). Зона передачи сигналов ограничена 2м (в поле зрения датчика не должно быть препятствий), а также используется 4 канала передачи данных.
В заключении обзора электронных компонентов можно отметить, что их состав в большей степени отвечает целям, которые преследует счастливый владелец той или иной версии. Домашняя – снабжена пультом управления, для большей динамики в программировании и управлении роботом, а образовательная – гироскопом – для исследования состояния робота и окружающего мира, и в то же время датчик расстояния обладает в образовательной версии более высокой точностью измерений. Но что дополнительно объединяет обе версии конструктора EV3 – это хрупкость соединительных кабелей (самый хрупкий элемент – защелка разъема). А также состав датчиков обоих наборов можно расширить, дополнительно купив либо недостающие датчики Lego, либо специализированные датчики серии HiTechnic.
4. Среда программирования
Роботы из конструктора EV3 могут быть запрограммированы несколькими способами. Основной способ – это через специальную среду, разработанную на основе программного продукта LabView. Все периферийные устройства (моторы, датчики, кнопки блока EV3 и др.) представлены в программе в виде специальных графических блоков. Сам язык программирования получил название EV3-G. Программирование возможно, как на компьютере (ноутбуке), так и на планшете. Подробности работы в среде программирования мы рассмотрим в отдельной статье. Однако отметим, что функциональные возможности у программной среды для образовательной версии шире, и дополнительно включают разделы учебных материалов, инструменты по документированию проектов, регистрации данных и др.
Также алгоритм для работы робота можно написать с помощью встроенного в сам блок EV3 программном редакторе (Brick Program) – однако в этом случае просмотр всей программы ограничен дисплеем блока, что затрудняет написание сложных алгоритмов.
И для самых продвинутых пользователей есть возможность написания программ на текстовых языках EV3Basic и Robot-C, или даже более классических, например, Java или Python (после установки новой ОС на EV3).
5. Дополнительные материалы
К каждому из наборов были разработаны дополнительные материалы – обучающие ролики, инструкции по сборке моделей, примеры алгоритмов.
В комплекте с версией EV3 Home идёт пять готовых моделей роботов (их можно было увидеть на упаковке набора): EV3STORM – робот-андроид с «пушкой», R3PTAR — кобра, GRIPP3R – робот с хватом, TRACK3R — танк и SPIK3R — скорпион. Помимо пошаговых инструкций по сборке представлены и пошаговые инструкции по программированию – что позволяет создавать и тестировать программы самостоятельно. Также имеется возможность загрузить дополнительные модели с готовым алгоритмом.
В то же время в комплекте с образовательной версией EV3 Education Core Set разработчиком заявлено 10 уникальных моделей. Однако есть нюанс – собрать из деталей набора 45544 можно только четыре из них — Robot Arm (Роботизированная рука), Gyro Boy (Балансирущий робот), Color Sorter (Сортировщик по цвету) и Puppy (Щенок). Оставшиеся шесть моделей требуют для сборки деталей из ресурсного набора 45560, который приобретается отдельно. Среди этих моделей: Elephant (Шагающий слон), Tank Bot (Танк), Stair Climber (Ступенеход), Znap (Монстр «Знап» на гусеницах) , Spinner Factory (Фабрика «вертушек») и Remote Control (Пульт дистанционного управления) – для последнего потребуется два блока EV3. Ещё один достаточный минус – программы для указанных моделей идут готовыми и новичку, который в первый раз держит набор EV3, разобраться в алгоритме будет крайне сложно. Помимо моделей для сборки имеется учебное пособие по робототехнике и вспомогательные материалы по работе со средой программирования.

ИТОГИ
Обе версии платформы EV3 являются самодостаточным продуктом, и отвечают именно тем целям, которые вы преследуете. Это дополнительно подчеркивают и сами названия версий – домашняя и образовательная. Элементная база, как деталей, так и электронных компонентов позволяет создавать уникальные проекты.
Если вы приобретаете набор EV3 для частного использования – то версия 31313 станет отличный выбором (только не забудьте купить отдельный контейнер для хранения). С другой стороны, если вы решили укомплектовать кружок робототехники, то остановите свой выбор на версии 45544 и никак иначе.
Читайте также: