Ev3 lego перетягивание каната
Обновлено: 13.05.2024
Этот сайт рассчитан на тех, кто делает первые шаги в робототехнику. Здесь Вы найдете Уроки для начинающих робототехников, Решение практических задач робототехники, различные материалы для занятий и соревнований, полезные советы по использованию среды программирования, а также ссылки на ресурсы, посвященные Lego-конструированию. Надеемся, что информация, представленная на сайте, будет Вам полезной!
Урок №11 - Кегельринг


Введение:
Раздел "Практика" являет собой продолжение курса "Первые шаги". На протяжении ряда уроков мы разберем решение базовых задач робототехники., научимся получать и обрабатывать информацию от нескольких датчиков. Надеемся, что полученные знания помогут вам в дальнейшем при самостоятельном решении творческих и соревновательных задач.
Урок №11 посвятим разбору соревновательной дисциплины под названием "Кегельринг".
11.1 Правила соревнования. Подготовка поля для проведения соревнований.
Основные правила "Кегельринга" довольно просты: необходимо собрать и запрограммировать робота, который выталкивает кегли за пределы ринга. Кеглями, как правило, выступают жестяные банки емкостью 0,33 л, а роль ринга выполняет белое поле, ограниченное черной окружностью с шириной линии 50 мм. С одним из вариантов регламента проведения соревнования можете ознакомиться под спойлером ниже:
1. Условия состязания
- За наиболее короткое время робот, не выходя более чем на 5 секунд за пределы круга, очерчивающего ринг, должен вытолкнуть расположенные в нем кегли.
- На очистку ринга от кеглей дается максимум 2 минуты.
- Если робот полностью выйдет за линию круга более чем на 5 секунд, попытка не засчитывается.
- Во время проведения состязания участники команд не должны касаться роботов, кеглей или ринга.
2. Ринг
- Цвет ринга - светлый.
- Цвет ограничительной линии - черный.
- Диаметр ринга - 1 м (белый круг).
- Ширина ограничительной линии - 50 мм.
3. Кегли
- Кегли представляют собой жестяные цилиндры и изготовлены из пустых стандартных жестяных банок (330 мл), использующихся для напитков.
- Диаметр кегли - 70 мм.
- Высота кегли - 120 мм.
- Вес кегли - не более 50 гр.
- Цвет кегли - белый.
4. Робот
- Максимальная ширина робота 20 см, длина - 20 см.
- Высота и вес робота не ограничены.
- Робот должен быть автономным.
- Во время соревнования размеры робота должны оставаться неизменными и не должны выходить за пределы 20 х 20 см.
- Робот не должен иметь никаких приспособлений для выталкивания кеглей (механических, пневматических, вибрационных, акустических и др.).
- Робот должен выталкивать кегли исключительно своим корпусом.
- Запрещено использование каких-либо клейких приспособлений на корпусе робота для сбора кеглей.
5. Игра
6. Правила отбора победителя
- Каждой команде дается не менее двух попыток (точное число определяется судейской коллегией в день проведения соревнований).
- В зачет принимается лучшее время из попыток или максимальное число вытолкнутых кеглей за отведенное время.
- Победителем объявляется команда, чей робот затратил на очистку ринга от кеглей наименьшее время, или, если ни одна команда не справилась с полной очисткой ринга, команда, чей робот вытолкнул за пределы ринга наибольшее количество кеглей.
Итак: для проведения соревнования нам понадобится поле, точно такое же, которое мы использовали при решении Задачи №12 Урока №6 курса "Первые шаги" . Вы можете скачать макет подходящего поля на странице "Макеты полей для тренировки и соревнований" нашего сайта, а затем распечатать его в цифровой типографии на баннерной ткани, либо изготовить поле самостоятельно, используя плакатную бумагу подходящего размера, большой циркуль, линейку и черную тушь.
Жестяные банки лучше всего обклеить по периметру самоклеящейся бумагой (нам понадобятся 2 - 4 банки белого цвета и столько же - черного).
Реквизит для урока готов!
11.2 Конструирование робота для конкретного вида соревнования.
На первоначальном этапе решения задачи давайте сделаем пару маленьких допущений: не будем обращать внимание на удовлетворение требования к размерам нашего робота, ограничимся поиском и выталкиванием всего одной кегли.
Наступает важный этап моделирования робота - перед нами стоят две взаимосвязанных задачи:
- Разработка ключевого алгоритма поведения нашего робота;
- Разработка механической конструкции робота, позволяющей реализовать требуемое поведение.
Рассмотрим следующую поведенческую модель:
Следовательно, наш робот должен:
- уметь вращаться на месте вокруг своей оси;
- уметь двигаться прямолинейно;
- уметь обнаруживать предмет, удаленный на некоторое расстояние;
- уметь обнаруживать границу поля.
Данные требования диктуют нам условия конструкции робота:
- для реализации первых двух условий применим уже известную нам подвижную платформу, использующую два больших мотора и вращающуюся опору (робот-тележка);
- для обнаружения кегли воспользуемся одним из имеющихся в наличии датчиков: инфракрасным или ультразвуковым;
- границу поля нам поможет обнаружить датчик цвета.
Всем условиям в полной мере отвечает наш робот, которым мы пользовались, когда проходили курс "Первые шаги".
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Вы можете воспользоваться предложенной инструкцией или собрать собственного робота, отвечающего определенным нами требованиям к его конструкции. В процессе сборки конструкции не забудьте подключить моторы и датчики к модулю EV3: левый мотор - к порту "B", правый мотор - к порту "C", ультразвуковой или инфракрасный датчик - к порту "2", датчик цвета - к порту "3".
После сборки робота приступим к созданию программы.
11.3 Создание программы для соревнования "Кегельринг".
Подробно пропишем последовательность действий нашего робота для обнаружения одной кегли на поле:
- вращаться вокруг своей оси по часовой стрелке, пока впереди расположенный датчик не обнаружит кеглю;
- остановиться напротив кегли;
- двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
- остановиться;
- двигаться назад в центр поля.
Приступим к реализации и отладке п. 1, 2 - научим нашего робота обнаруживать кеглю и останавливаться точно напротив. Сначала нам необходимо выбрать пороговое значение для обнаружения кегли напротив нашего робота. Для этого загрузим среду программирования, создадим новый проект - "lessons-2", новую программу в проекте назовем "lesson-11". Подключим робота к среде программирования, затем установим его точно в центр поля, поставим напротив робота кеглю.
В нашем случае ультразвуковой датчик в режиме "Расстояние в сантиметрах" показывает значение - 25,9 (Рис. 1 поз. 2).
Рис. 1
Инфракрасный датчик в режиме "Приближение" показывает значение - 48 (Рис. 2 поз. 2)
Рис. 2

Рис. 3
Верхний ряд блоков отображает показания моторов, подключенных к модулю EV3 (Рис. 4 поз. 1).
Нижний ряд блоков отображает показания датчиков, подключенных к модулю EV3. Управляя клавишами модуля EV3 можно перемещаться между показаниями для получения подробной информации о датчике и выводимом значении (Рис. 4 поз. 2).

Рис. 4
Теперь мы можем запрограммировать нахождение роботом кегли:
Ультразвуковой датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком "Независимое управление моторами""Зеленой палитры", Режим работы блока установим "Включить", значение мощности для порта "B" установим равным 30, значение мощности для порта "C" установим равным -30(Рис. 5 поз.1),
- Для поиска кегли используем программный блок "Ожидание""Оранжевой палитры" в режиме "Ультразвуковой датчик - Сравнение - Расстояние в сантиметрах". Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 35(Рис. 5 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок "Независимое управление моторами""Зеленой палитры" выключим моторы (Рис. 5 поз. 3).

Рис. 5
Инфракрасный датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком "Независимое управление моторами""Зеленой палитры", Режим работы блока установим "Включить", значение мощности для порта "B" установим равным 30, значение мощности для порта "C" установим равным -30(Рис. 6 поз.1),
- Для поиска кегли воспользуемся программным блоком "Ожидание""Оранжевой палитры" в режиме "Инфракрасный датчик - Сравнение - Приближение". Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 55(Рис. 6 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок "Независимое управление моторами""Зеленой палитры" выключим моторы (Рис. 6 поз. 3).

Рис. 6
Загрузим получившуюся программу в робота и запустим её на выполнение. Раз за разом, выполняя программу, мы можем заметить, что наш робот останавливается не совсем точно напротив банки. Связано это с тем, что датчик может обнаруживать предмет не только строго напротив себя, а и на некотором отклонении от направления взгляда датчика. В этом случае можно, либо после остановки робота немного довернуть его на необходимый угол, используя дополнительный блок "Независимое управление моторами", либо постепенно увеличивать скорость вращения, подбирая параметр мощность (Рис. 5, 6 поз. 1), пока робот не станет останавливаться точно напротив кегли. Например, нам потребовалось увеличить мощность до 50 единиц для робота, собранного из образовательной версии набора, и до 40 единиц для робота, собранного из домашней версии набора.
Переходим к реализации п. 3, 4 нашей последовательности действий.
Двигаться вперед и останавливаться при пересечении черной линии мы уже научились, когда разбирали Задачу №11 Урока №6 курса "Первые шаги". Установим робота таким образом, чтобы датчик цвета находился точно над черной границей поля и измерим его значение в режиме "Яркость отраженного света" любым удобным вам способом, рассмотренным выше. В нашем случае получилось значение, равное 7. В качестве порогового значение примем число 10.
Добавим к нашей программе обнаружения кегли следующие программные блоки:
- Для того, чтобы заставить робота двигаться прямолинейно, воспользуемся программным блоком "Рулевое управление""Зеленой палитры". Режим работы блока установим "Включить", параметр "Рулевое управление " = 0, параметр "Мощность" = 50. (Рис. 7 поз. 1)
- Для поиска датчиком цвета черной границы воспользуемся программным блоком "Ожидание""Оранжевой палитры" в режиме "Датчик цвета - Сравнение - Яркость отраженного сигнала", параметр "Тип сравнения" = 4, параметр "Пороговое значение" = 10. (Рис. 7 поз. 2)
- После того, как робот пересечет черную линию, используя программный блок "Рулевое управление""Зеленой палитры" выключим моторы (Рис. 7 поз. 3) .

Рис. 7
Наш робот научился успешно находить и выталкивать кеглю, но текущая конструкция не позволяет роботу уверено её фиксировать при транспортировке за пределы поля. Давайте немного доработаем конструкцию робота, прикрепив к нему клешни, которые увеличат ширину захвата и позволят прочно удерживать кеглю. На переднем бампере робота слева и справа закрепите детали, как показано на рисунках ниже:
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Теперь наш робот просто отлично справляется со своей работой! Осталось только научить его возвращаться в центр круга.
Рис. 8
Программный блок "Вращение мотора" "Желтой палитры" позволяет получать и обрабатывать это значение в программе. Режим "Сброс" программного блока "Вращение мотора" устанавливает нулевое значение датчика и отсчет оборотов начинается сначала. (Рис. 9)

Рис. 9
Воспользуемся этой возможностью: если мы сбросим показание одного из датчиков моторов в 0 (в данном случае можно обнулить значение любого из моторов "B" и "C", ведь робот поедет прямо, а значит оба колеса провернутся на одинаковое значение), то после остановки робота над черной линией, можно будет получить значение датчика в "Градусах" или "Оборотах" и, подав его на вход соответствующего параметра блока "Рулевое управление", заставить робота проехать точно такое же расстояние. А для того, чтобы робот двигался назад, необходимо изменить значение параметра "Мощность" на отрицательное значение.
Внесем необходимые изменения в нашу программу:
- Перед началом движения вперед сбросим в 0 показания датчика вращения мотора, подключенного к порту "B"(Рис. 10 поз. 1).
- После остановки на черной границе поля считаем расстояние, пройденное мотором "B" в градусах (Рис. 10 поз. 1).
- Полученное значение подадим в параметр "Градусы" программного блока "Рулевое управление", значение параметра "Мощность" = -50(Рис. 10 поз. 1)!

Рис. 10
Загрузим получившуюся программу в робота и убедимся, что робот нашел кеглю, вытолкал её за пределы поля и вернулся в центр поля!
Для того, чтобы заставить нашего робота выталкивать требуемое количество кеглей, все наши программные блоки поместим внутрь программного блока "Цикл" "Оранжевой палитры". Режим программного блока "Цикл" установим в значение "Подсчет", параметр "Подсчет" установим равным количеству кеглей (Рис. 11, 12 поз. 1) Для удобства отображения на экране нам пришлось оформить программу в две строки - вы же вполне можете сложить её в одну строку.

Рис. 11

Рис. 12
Программа готова!
11.4 Соревнование "Кегельринг" с дополнительм условием
На сайте myROBOT.ru опубликованы еще два регламента проведения соревнования "Кегельринг": "Кегельринг-КВАДРО" и "Кегельринг-МАКРО". Основное условие - необходимо выталкивать за пределы поля белые кегли, оставляя на месте черные.
Как научить робота на расстоянии определять цвет кегли? Можно впереди, по ходу движения робота расположить еще один датчик цвета и, приблизившись к кегле на расстояние 1 - 2 см, определить её цвет, теряя при этом драгоценное время, отведенное на выполнение задания. Но, если вы внимательно изучили п. 8.2 Урока №8 курса "Первые шаги", то уже знаете, что на показания инфракрасного датчика в режиме "Приближение" влияет также цвет предмета. Проведем эксперимент: установим робота с инфракрасным датчиком в центр поля, напротив поместим белую кеглю и зафиксируем показания датчика. В нашем случае это значение равно 49. Теперь напротив робота установим черную кеглю - показание датчика изменилось и теперь, не смотря на одинаковое расстояние, составляет 64. Следовательно, для успешного обнаружения белых кеглей и игнорирования черных, необходимо выбрать в качестве порогового - значение, находящееся между этими числами. Число 55 полностью удовлетворяет этому условию. Нам даже не придется переделывать основной алгоритм программы! Попробуйте и убедитесь в этом сами!
К сожалению, решить данную задачу с использованием только ультразвукового датчика, не представляется возможным.
Заключение:
При решении практической задачи робототехники успех приходит только при многократном тестировании робота. В процессе тестирования возможно возникновение ситуации, когда вам потребуется вносить изменения не только в программу, но и конструкцию робота. Не бойтесь экспериментировать, не бойтесь ошибаться. Вдумчивый анализ ошибок обязательно принесет вам положительный результат! Удачи!
Здравствуйте, а что делать, если надо возвести в цикл так, чтобы при совершении одного оборота, без встречи кегль, робот останавливался
Здравствуйте буквально позовчера я ездил на серевнования в месте с напарником мы учавствовали в серевнование робот в мешке. К сожалению не выйграли . И ещё там был кегелеринг у всех робота крутились на один оборот вокруг своей оси и проезжали между банками. Спасибо за статью дома все сделал и всё работает
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Intel инвестировала $13 млн в Aldebaran Robotics — разработчика роботов NAO
Инвестиционное подразделение корпорации Intel, именуемое Intel Capital, сообщило о намерении инвестировать средства в компанию-разработчика роботов NAO – Aldebaran Roboti.

Оживший паукобот отслеживает лицо наблюдателя
Недавно британский инженер Мэтт Дентон (Matt Denton) и его компания MicroMagic Systems завершили работу над роботом-животным четвёртого поколения, открыв специальный сайт.
Рубрика: Инструкции к роботу LEGO MINDSTORMS NXT 2.0
робототехника для начинающих
Внимание! Юные робототехники! Для Вас мы подготовили страницу с простыми и понятными инструкциями к нашему любому конструктору NXT!
Скачивайте и собирайте модели роботов из конструктора версии 8547 (robot lego mindstorms nxt 2.0).
Внешний вид коробки и руководство пользователя к конструкторам LEGO Mindstorm NXT версий 8527, 8547 и 9797 (выпускались до 2013 года):
Пошаговые инструкции для сборки разных моделей лего роботов (для конструктора версии mindstorm 8547)
| Инструкция по сборке робота АЛЬФАРЕКСа (артикул набора 8547)  Время сборки 4 часа (2 человека в группе). Рекомендуемый возраст для занятия робототехникой детям - 12-14 лет | Робот крокодил  Робот - крокодил (робогатор) | Робот пятиминутка  | Бот-внедорожник  | Трёхколёсный бот  | Конструируем робота "Пятиминутку" за 5 минут ;-) | Собираем и программируем Бот-внедорожник. Это уже более серьёзная модель, использующая датчик касания. | Создаём и тестируем Трёхколёсного бота. У этого робота ещё нет датчиков, но уже можно писать средние по сложности программы для управления двумя серводвигателями. | Линейный ползун  | Исследователь  | Нападающий коготь  | Добавляем к "роботу пятиминутке" датчик цвета и получаем из него настоящего "Линейного ползуна" и получаем робот с ИИ начального уровня! | Всем хорош "Бот-внедорожник": манёвренный, бронированный, умный. Ему бы ещё ультра-зрение бы добавить. Добавляем! Встречайте: Исследователь - вот вам бот с искусственным интеллектом среднего уровня! | Хищный атакующий робот, содержащий коготь, которым он может ударить в цель. Собираем, тестируем! | МАНТИ - застенчивый богомол  | Шарикопульт  | Робот-база с тремя двигателями  | Удивительное существо: робот-богомол. Постройте, загрузите базовую программу, порадутесь и погрустите вместе с МАНТИ! | Интересный миниробот под названием "Шарикопульт" очень простой, но может быть использован как дополнение к любому другому роботу. | Базовый робот с тремя двигателями может пригодиться для получения навыков строительства собственных блоков. Так как в базовом роботе нет ни датчиков, ни спец.механизмов. Вы все это можете сделать сами! | Двух кнопочный пульт ДУ  | Продвинутый Молот-автобот  | Простой светомер из лего  | В данном уроке можно научиться собирать двух кнопочный пульт дистанционного управления любым роботом, собранным из конструктора лего миндстормз! | Новенький проект "Молот-автобот"- это сложный в сборке и программировании робот. Но итоговая модель автомобиля-робота с молотом позволяет использовать 3 двигателя и 2 датчика! | Эксперименты с данным светомером позволят научиться использовать датчик света в своих роботах. | Робот СЕГВЭЙ с наездником  | Измеряем растояние длиномером  | автобот: гоночная машина из лего  | Даже робота СЕГВЭЙ (SEGWAY) можно построить из набора 8547. Инструкция доступна при клике на картинку. | Простейшее дополнение к роботу позволяет измерять пройденное им растояние. В статье описано как создать очень удобного робота-длиномера из робота пятиминутки. | Замечательная разработка! Автомобиль, да ещё какой! Есть возможность и удалённого управления, и "мозги", позволяющие принимать решения, считывая цветные линии на полу! Можно скачать - это АВТОБОТ! | Пятикнопочный пульт ДУ  | Супер пульт ДУ  | Миниавто с 3-х пультом ДУ  | Пульт ДУ можно использовать практически в любом своём проекте. Единственное требование - наличие двух конструкторов lego mindstorms nxt 2.0 | Супер пульт ДУ то уже мега-навороченный вариант для управления гоночным автомобилием или любым другим роботом MINDSTORMS NXT! | Забавная игрушка - миниавтомобильчик с трёх кнопочным пультом дистанционного управления |
Комплект из 9-и инструкций по лего роботам (robot lego mindstorms nxt 8547) под общим названием:

Мультибот . Кликните на картинку или просмотрите конструкции, приведённые ниже:
 Транспортное средство Этот транспорт является базовым для последующих робототехнических машин. Научитесь быстро собирать его прежде чем начнёте собирать более сложные механизмы. |  Гусеничное транспортное средство Собирается после того как вы собрали транспортное средство. Робот подходит для соревнований на силовое перетягивание каната. |  Гольфкар с лункой Собирается на базе гусеничного транспортного средства путём небольшой модернизации.
Wave Glider SV3: новый робот для покорения океановКомпания Liquid Robotics представила новую версию своего робота Wave Glider. Модель под названием Wave Glider SV3 в отличие от предыдущей модели имеет большую скорость (2.
Робо-лоток для кошекЭто несложное, но эффективное устройство не требует покупки дорогостоящих сменных картриджей, специальных пакетов для отходов и специального наполнителя. Для робота лотка. Рубрика: Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXTКонструктор Lego WeDoКонструктор Lego WeDo 2.0Программирование и алгоритмы для lego mindstorms nxt 2.0Соревнования роботов
Поля для соревнований EV3, NXT и arduinoНиже представлены поля для подготовки и проведения соревнований по робототехники возрастных категорий: младшая, средняя, старшая. Рекомендуем использовать поля в школах, лицеях и центрах дополнительного образования детей для подготовки и проведения школьных или городских соревнований. Научив, конструировать роботов и создавать программы на этих соревновательных полях Вам будет гораздо проще перейти на ступеньку выше - подготовку и участие в районных, краевых / областных соревнованиях. Часто конструкция и программа робота частично подходит на крупных соревнованиях. Экономится огромное количество времени. Вместо того, чтобы с нуля конструировать машину и писать программу Ваши подопечные могут заняться только доведением своего творения до логического конца. Из личного опыта: при консультации с судьями они часто удивляются стремлению детишек уничтожить все наработки и сконструировать новое устройство . По их мнению - это лишняя трата времени. Более половины "горе конструкторов" не успевают за 1-2 дня соревнований создать что-либо новое. Это и понятно, ведь даже взрослый человек не сможет сделать профессиональную робототехническую машину в стрессовой ситуации и, одновременно сжатом по времени промежутке. Поэтому, мой Вам совет как учителю робототехники - тренировки , тренировки и ещё раз тренировки на этих полях. Вот залог успеха! Наши поля для робототехники скачать можно абсолютно бесплатно. Пользуйтесь, удачи Вам, робототехники!
Поле позволяет одновременно стартовать двум роботам. Правила соревнований предполагают, что робот должен пропустить соперника, находящегося на перекрестке. Размер поля: 2400 x 1200 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) В дисциплине Кегельринг задача робота - за наименьшее время вытолкнуть кегли за пределы черной линии. Банки расставлены внутри круга и, обычно, это банки из под напитков 0,33 л. оклеяные клеящей или цветной бумагой. В дисциплине Сумо побеждает тот робот, который вытолкнет соперника из зоны круга за пределы черной линии первым. Размер поля: 1250 x 1250 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Макет поля для отработки алгоритмов движения вдоль черной линии Поле в дополнение к перекрёсткам и извилистым линиям содержит блоки инверсной линии (белая линия на черном поле) и штриховую разметку. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время. Размер поля: 2440 x 1220 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Данное поле более сложное и содержит множество перекрестков и извилистых линий. В правилах соревнований победа присуждается за проезд по заданной траектории за наименьшее время. Размер поля: 2440 x 1220 мм. Файл поля в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Положения для проведения соревнований, конкурсов и высотавок по робототехникеМы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
Инструкции для MINDSTORMS NXT PDF (13 шт.)
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.
Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.
Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
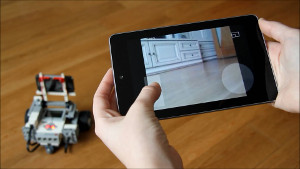
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».
В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.
В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
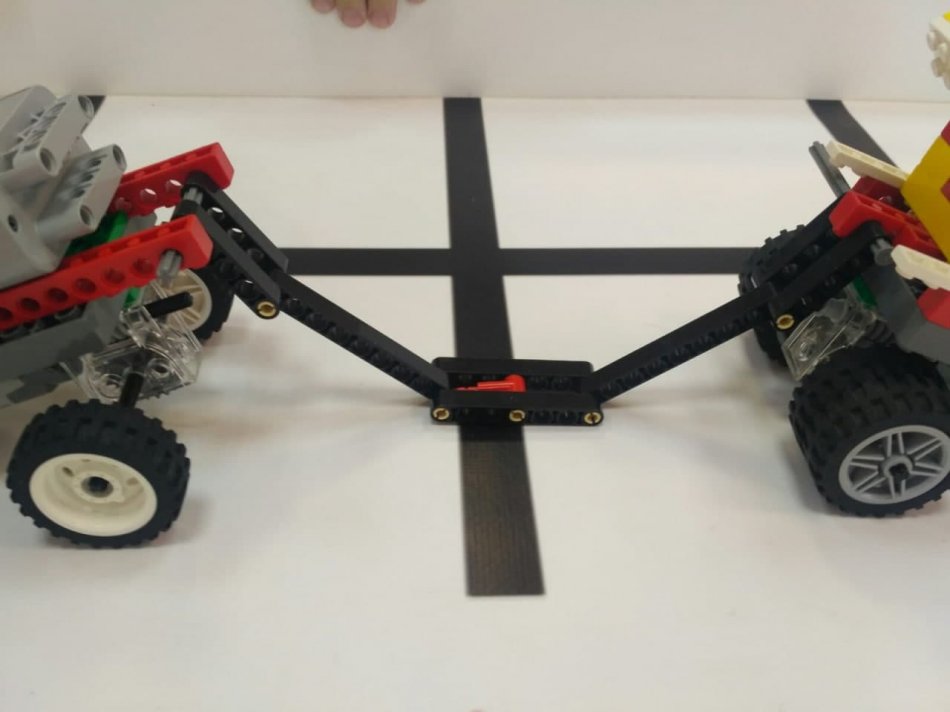
Поединок «перетягивание каната» проводится между двумя командами. Каждая команда выставляет на поединок одного робота. Поле представляет собой стол с нанесенной на его поверхность разделительной полосой. В качестве каната будет использоваться жесткая сцепка из деталей Lego Technic.
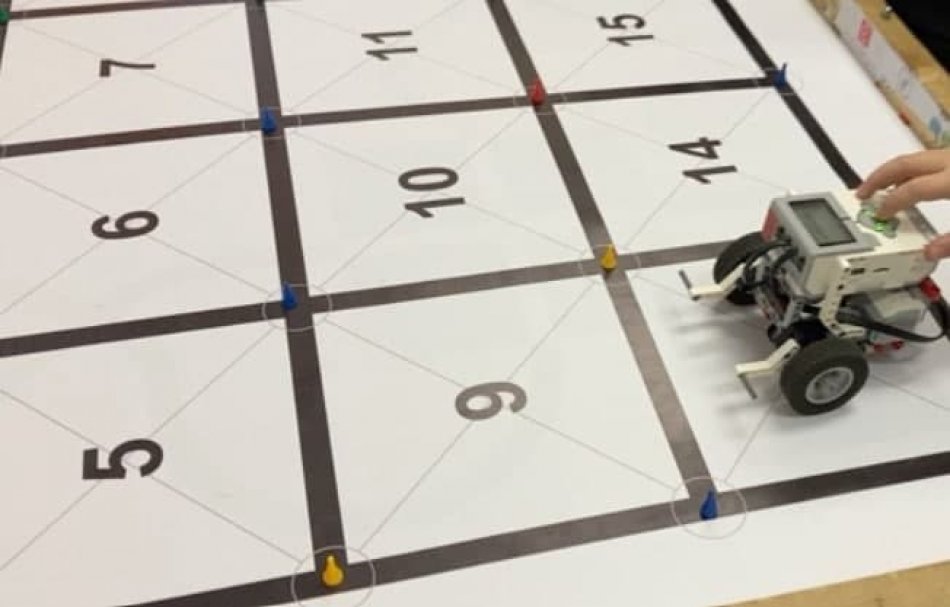
2 . Пятнашки
Категория для учащихся начальной ступени обучения робототехнике (до 11 лет, включительно) на образовательных наборах LEGO Mindstorms EV3®. Помогите роботу за кратчайшее время «собрать» максимальную сумму баллов на поле из 15-ти клеток. Максимальное время прохождения дистанции - 2 минуты.
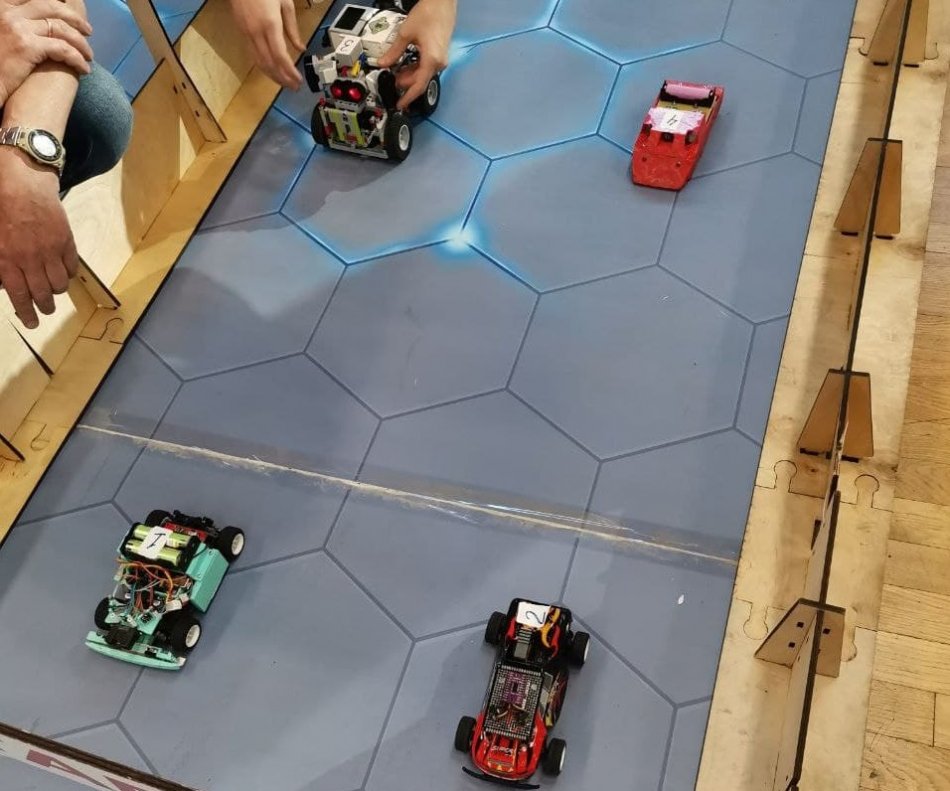
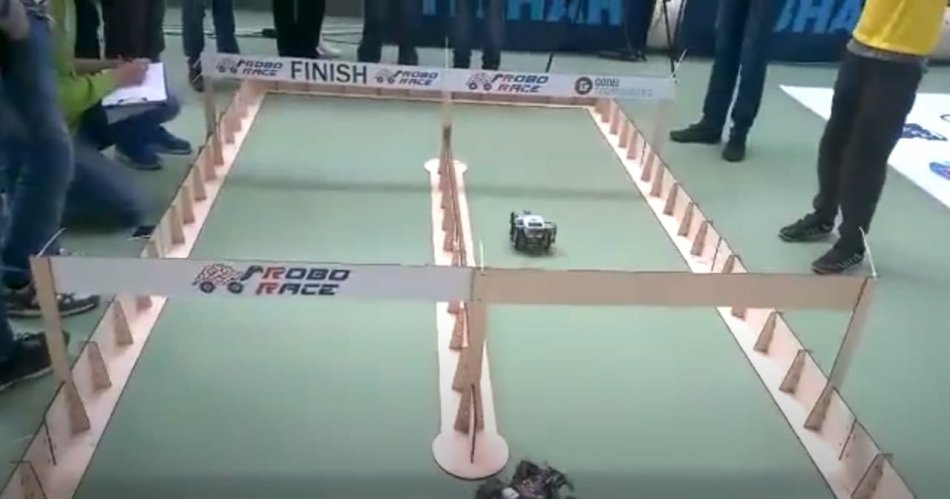
3 . Roborace. PRO
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
4 . Roborace. PRO mini
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
5 . Roborace. Образовательные конструкторы
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
6 . Roborace. Образовательные конструкторы. Junior
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
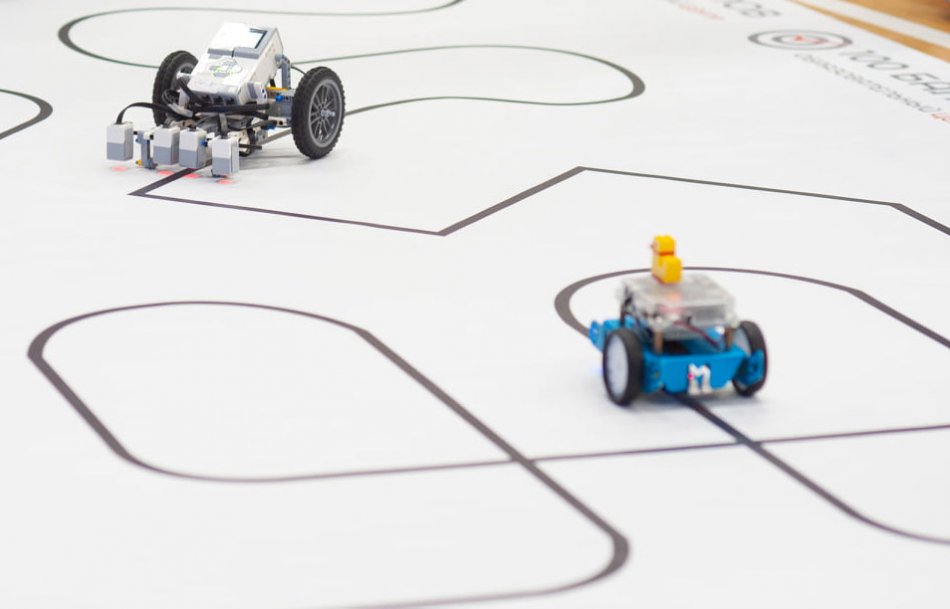
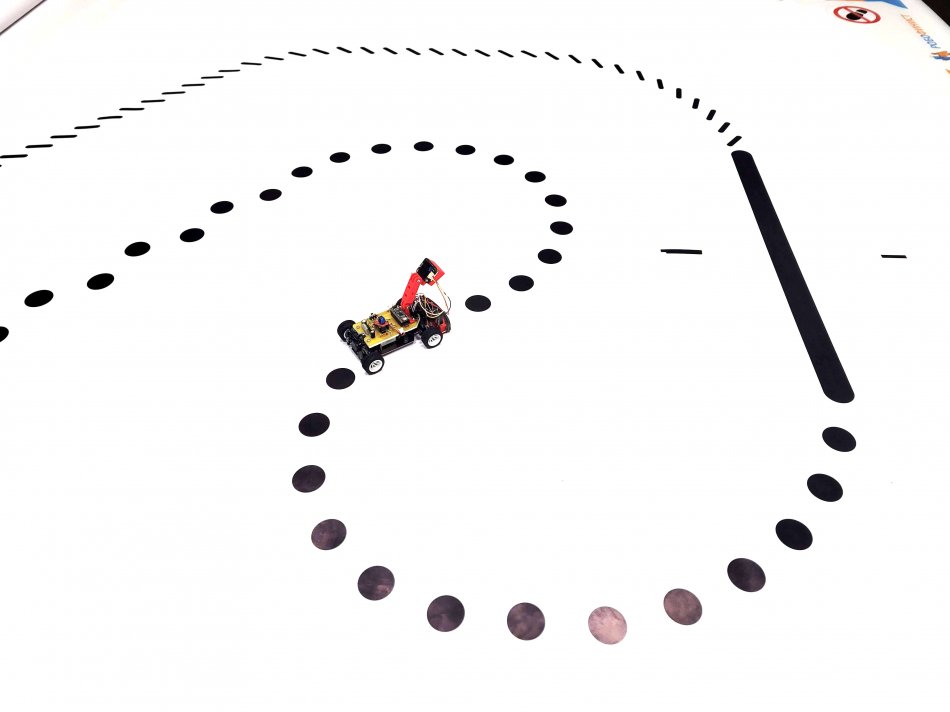
7 . Следование по линии. PRO
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме.
8 . Следование по линии. Юниоры
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме.
9 . Следование по линии. Образовательные конструкторы
10 . Линия Профи. Computer Vision
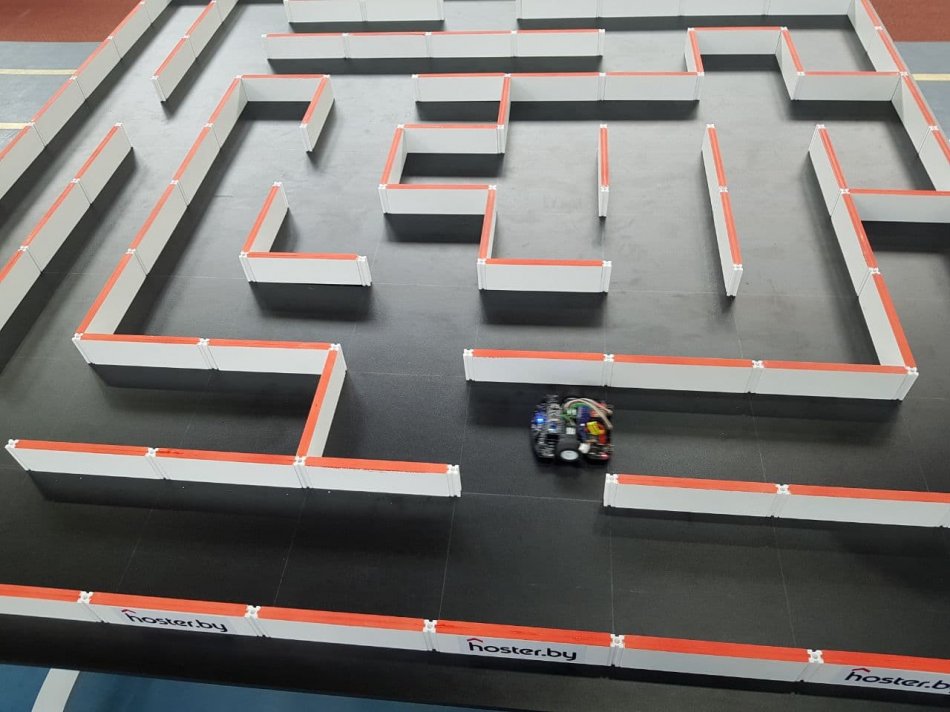
11 . Лабиринт
В этом виде состязаний участникам необходимо подготовить автономного мобильного робота, способного наиболее быстро добраться из одного конца лабиринта в другой. Конфигурация лабиринта заранее не известна участникам.
12 . Большое путешествие: младшая категория
«Большое путешествие» — это дисциплина, составленная из нескольких классических упражнений, которые робот должен выполнить последовательно и без остановки. За пять минут роботу предстоит: проехать по линии, обогнув препятствие, преодолеть лабиринт, линию с горкой, а также выбить все банки в кегельринге.
13 . Большое путешествие: старшая категория
«Большое путешествие» — это дисциплина, составленная из нескольких классических упражнений, которые робот должен выполнить последовательно и без остановки. За пять минут роботу предстоит: проехать по линии, обогнув движущееся препятствие, преодолеть лабиринт, линию с инверсией, а также выбить все банки в кегельринге, кроме одной. Оставшуюся банку необходимо вернуть на старт, пройдя все препятствия в обратном порядке. Побеждает тот, чей робот набрал наибольшее количество баллов при прохождении трассы.
14 . Программируемые дроны
Соревнование состоит из полетного задания. Задача пилота - показать свои навыки программирования БПЛА на прохождение трассы с препятствиями за минимальное время. Прохождение трассы считается засчитанным, если автономный БПЛА не сбился с заданного курса. Задача БПЛА - за минимальное время пройти трассу от места старта до места финиша, преодолев как можно больше препятствий с наименьшим количеством штрафных баллов. Победителем является команда, набравшая максимальное количество баллов по итогам результатов двух полетных заданий.
15 . Футбол управляемых роботов 4х4
Участникам футбола управляемых роботов 4×4 предстоит проявить себя не только в конструировании роботов, но и продемонстрировать сплоченную командную работу. На поле соревнуются 8 роботов, каждым из которых управляет участник. Полигон представляет собой уменьшенную копию настоящего футбольного поля. Задача каждой команды – забить наибольшее количество голов в ворота соперника. © 2019-2022 Федерация Спортивной и Образовательной Робототехники Читайте также:
|