
Инструкция по сборке принтера из лего
Обновлено: 26.07.2024
Сочетание 3D-печати и игрушек почти сразу же вызывает ассоциации со знакомым многим с детства конструктором Lego. Эта детская игрушка часто находит чрезвычайно неожиданные, никак не связанные с игрой применения, например, создание 3D-принтеров.
На рынке уже представлено несколько моделей, изготовленных из Lego, среди которых 3D-принтер, созданный из конструктора и предназначенный исключительно для производства деталей Lego. Существует также несколько примеров инструкций по созданию собственного 3D-принтера из Lego, и недавно была опубликована еще одна.
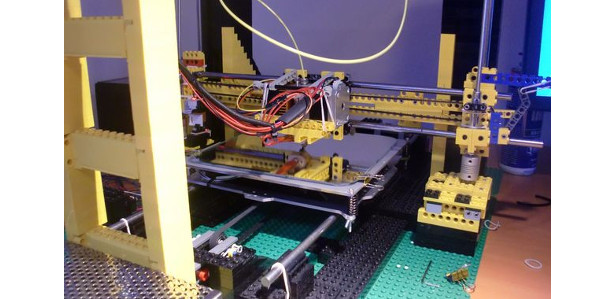
3D-принтер из Lego сложно назвать игрушкой хотя бы потому, что он способен создавать объекты вполне достойного качества. Устройство создано на основе модели Prusa i3 Rework и оборудовано шаговыми электродвигателями Nema 17, которые работают весьма успешно, несмотря на то, что в большинстве подобных устройств используются сервоприводы.
Госсе Адема, участник сайта Instructables, опубликовал руководство по сборке этого 3D-принтера с осями X, Y и Z. Для создания прочного основания используются стандартные кубики Lego 4х2 размером 32х16х9,6 мм. Учитывая, что в конструкции не применяются детали из серии Lego Mindstorms, а традиционные сервоприводы при этом заменены шаговыми моторами, Адема оговаривается, что его устройство нельзя назвать полностью созданным из Lego.
Что касается программного обеспечения, автор проекта сделал выбор в пользу Marlin для платы Atmega 2560 и Pronterface на ноутбуке для управления 3D-принтером. Печатная платформа устройства может нагреваться до 110 градусов.
Адема представил следующий список материалов, необходимых для создания 3D-принтера (он также рекомендует использовать болты M3x15 мм для присоединения электродвигателей):
Для механических деталей и рамы:
- Гладкий стержень диаметром 8 мм (3x100 см)
- Нарезной стержень M5 (1x100 см)
- Линейный подшипник LM8UU (11 шт.)
- Шариковый подшипник 608 (2 шт.)
- Гибкая муфта 5×5 (2 шт.)
- Шаговый электродвигатель Nema 17 (4 шт.)
- Шкив GT2 (2 шт.)
- Приводной ремень GT2 (200 см)
Для нагреваемой платформы:
- Несущая рама для оси Y (1 шт., можно использовать детали Lego для 3D-печати только из PLA)
- Нагреваемая платформа (1 шт.)
- Стеклянная пластина (1 шт.)
- Зажим для бумаги (1 шт.)
- Термистор 100 кОм (1 шт.)
Электронные комплектующие:
- Генератор линейного напряжения (1 шт.)
- Плата Atmega 2560 (1 шт.)
- Драйвер шагового двигателя (4 шт.)
- Концевой выключатель (3 шт.)
- Источник питания (1 шт.)
- Набор проводки для генераторов (1 шт.)
- Экструдер с мотором Nema (1 шт.)

После изготовления базы необходимо следовать подробной инструкции:
- Присоедините к оси Y двигатель и приводной ремень, воспользовавшись линейным подшипником LM8UU на расстоянии 170 мм. Для закрепления мотора используйте детали из серии Technic на задней стороне устройства.
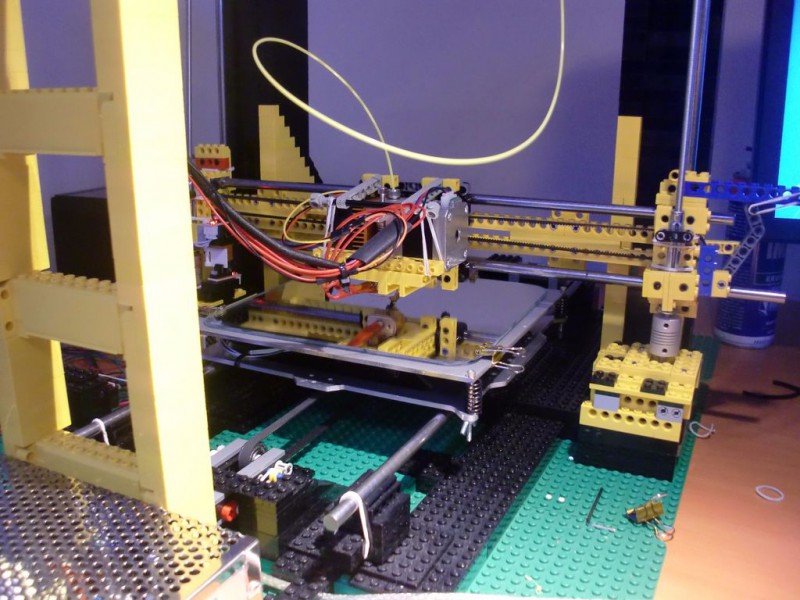
- Начните конструировать раму, собирая ось Z вместе с двигателем и стержнем с резьбой. На этом этапе необходимо использовать навыки работы с конструктором Lego. «Постройте прочную L-раму высотой в 36 кубиков Lego, – объясняет Адема. – Этот параметр определяет высоту предметов, которые вы сможете напечатать. Однако не стоит делать раму слишком высокой, поскольку это негативно сказывается на ее устойчивости. Через каждые четыре кубика используйте деталь из набора Technic, а также пластинки для укрепления рамы. Соедините обе стороны в верхней части рамы».
- Электромоторы Nema закрепляются с помощью пластин 2×4 и 2×8, в которых есть отверстия.
- Закрепите мотор на оси X – в этой части необходимо строго соблюдать инструкции, поскольку Адема предупреждает, что это наиболее сложный этап. Автор проекта приложил фотографии каждого шага по закреплению на оси X электромотора, несущей конструкции для экструдера и приводного ремня, начиная с правой стороны и заканчивая левой.
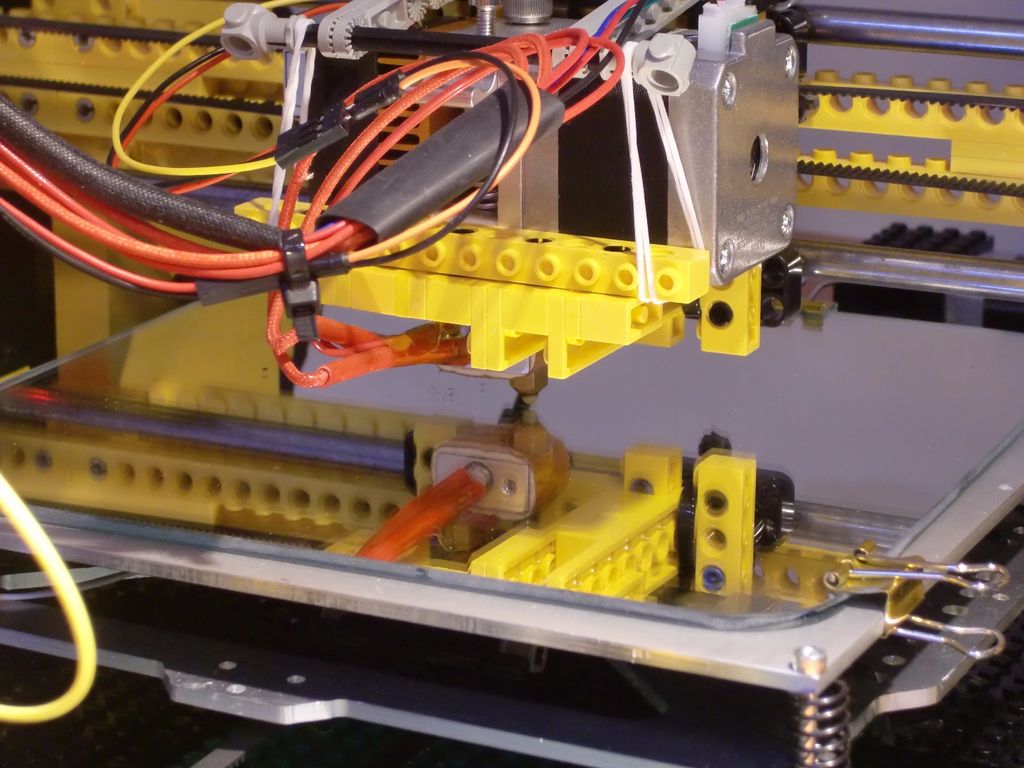
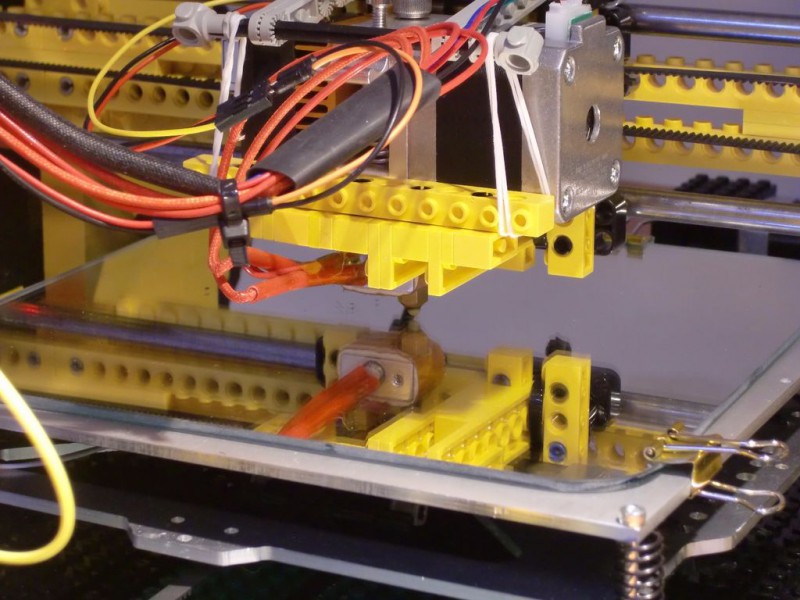
- Установите несущую конструкцию для экструдера и приводной ремень. Учитывая размеры устройства, Адема остановил свой выбор на уже собранном экструдере MK8 от Geeetech с соплом 0,3 мм, с которым используется материал диаметром 1,75 мм. После установки разработчик рекомендует использовать кабельные стяжки для более надежного закрепления.
- Установите три концевых выключателя, по одному на каждой оси. Каждый из них закрепляется на кубике из серии Technic с болтами М3 x 15 мм и гайками.Что касается электронных комплектующих, на седьмом этапе Адема приводит ссылки на различные ресурсы, например, сайт проекта RepRap. Закончив сборку электроники, необходимо протестировать моторы, выключатели, нагреваемую платформу и экструдер.
Адема отмечает, что необходимо также учесть, что перед установкой на принтер программного обеспечения от Marlin придется внести изменения в устройство и его конфигурацию. «Во время первой пробной печати я столкнулся с проблемой количества материала, но 3D-принтер работал, – рассказывает Адема. – Основное затруднение заключалось в разнице параметров материала и сопла экструдера. Это было вызвано настройками Pronterface».
После этого разработчик был вынужден поменять настройки. Для калибровки устройства Адема также предоставляет ссылку на сайт RepRap, а также дает дополнительные особые указания для настройки и необходимые команды.
«Несмотря на то, что устройство еще нуждается в калибровке, оно прекрасно работает, – говорит Адема. – Думаю, мне нужно еще поработать над настройками материала. Важно обеспечить плавное движение всех осей, а также безошибочную работу шаговых моторов. С этой проблемой я столкнулся при первой пробной печати». Разработчик планирует продолжить совершенствовать навыки 3D-печати, также обновляя свое руководство по созданию 3D-принтера из Lego на сайте Instructables.
Снова приветствую всех мозгочинов! И выкладываю продолжение мозгоруководства по созданию своими руками 3D-принтера используя Lego-блоки.
Шаг 8: Электроника
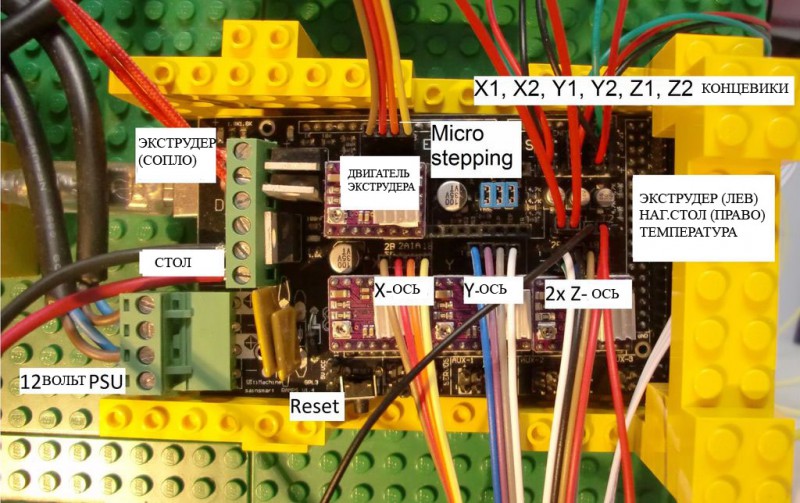

Микрошаги
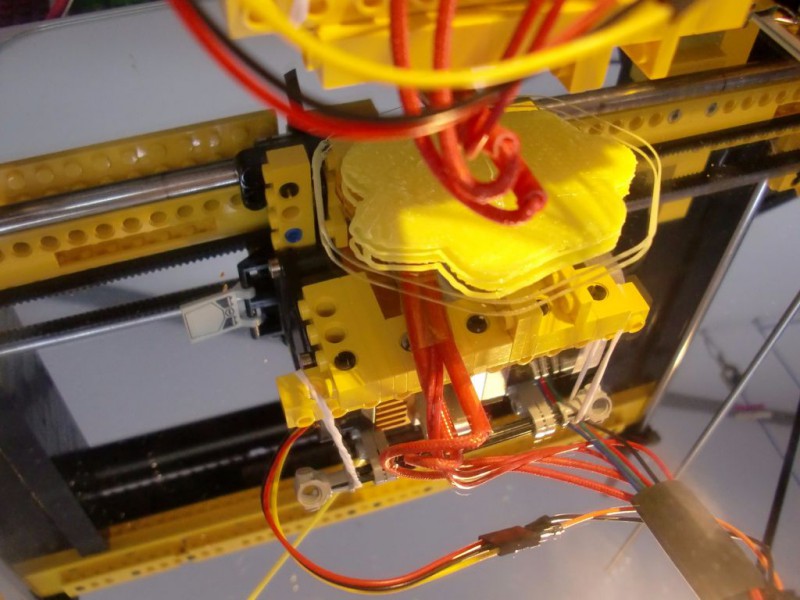
Двигатели Nema имеют 200 шагов/оборот, но и это число можно увеличить с помощью микростеппинга, то есть перемычек на плате Ramp (3 синих перемычки на фото). Перемычки микростеппинга выставляются до монтажа плат stepstick, и если используется драйвер двигателя A4988, то можно получить 16 микрошагов, а если Drv8825, то 32 микрошага.
Размер шага A4988
j1 j2 j3
no no no fullstep
yes no no halfstep
no yes no 1/4step
yes yes no 1/8step
yes yes yes 1/16step
Размер шага Drv8825
j1 j2 j3
no no no full step
yes no no half step
no yes no 1/4 step
yes yes no 1/4 step
no no yes 1/16 step
yes no yes 1/32 step
no yes yes 1/32step
yes yes yes 1/32step
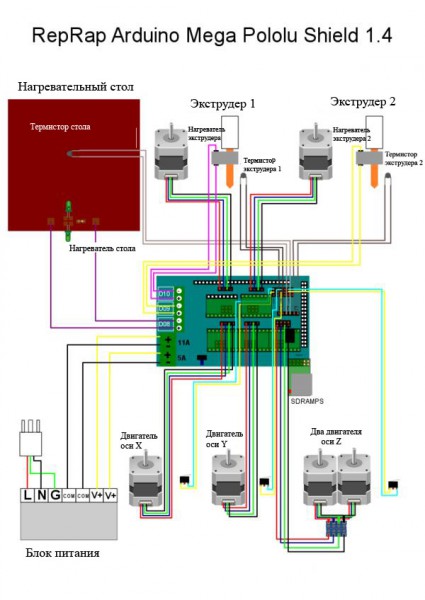
Концевые выключатели
Для Lego-принтера можно использовать 6 концевиков, но достаточно и 3-х, по одному на каждую ось и подключаются они к контактам X1, Y1 и Z1. Каждый концевой выключатель имеет 3 провода с назначением:
— сигнал
— масса, заземление
— Vcc
Шаговые двигатели имееют 4 провода для подключения к плате и пронумерованы слева направо 1A, 1B, 2A, 2B, где:
1А — черный
1В — зеленый
2А — синий
2В — красный
Весь даташит для двигателя находится 3303_0_Datasheet
После подключения всей электроники производится тестирование мозгоподелки, а именно функционирование двигателей, концевиков, экструдера и нагрева стола. Еще перед установкой софта Marlin на принтер следует изменить файл configuration.h. А вот уже после его загрузки можно начать 3D печать!
Во время моей первой печати я столкнулся с небольшими трудностями при подаче нити — была разница в настройках мозгонити и сопла экструдера, и вызвано это было настройками Pronterface. Фактический размер нити был 1.75кв.мм, а выставленный 3кв.мм, размер сопла по умолчанию был выставлен 0.5 с высотой слоя 0.4мм, а фактический диаметр сопла 0.3мм.
Заголовок и версия
В данной 3D мозгоподелке используется плата Ramps 1.4 и один экструдер.
Для нагрева стола используются два термистора и еще один на 100к в экструдере:
Настройка температурного максимума зависит от применяемых компонентов — экструдера и нагревательного стола. Так для Geeetech Mk8 он составляет 280 градусов Цельсия.
Концевый выключатели и размер печатного пространства
Положение концевиков: значение 1 для максимального положения и — 1 для минимального. Начальная точка: по оси Y стол выдвинут вперед, по оси X экструдер находится слева, а по оси Z в нижнем положении. Для моего принтера эта точка описывается так:
Максимумы печатного пространства зависят от сборки:
Шаги, скорость и ускорение
Скорость подачи выставляется в мм/мин вместо мм/сс.
Шаговый двигатель Nema 17: 360/1.8=200 шагов за оборот
Микростеппинг Drv8825= 32 (max)
Микростеппинг a4988 = 16 (max)
Шаг/единицу для осей X и Y:
steps_per_mm = (шаг двигателя*микрошаг драйвера) / (расстояние между зубцами ремня* диаметр зубчатого шкива)= (200 * 32 шага) / (2 * 20 мм) = 160 шагов / мм
Шаг/единицу для оси Z:
Для 5мм-го резьбового стержня шаг зубца=0.8 (грубо) или 0.5(хорошо)
steps_per_mm = (шаг двигателя* микрошаг драйвера) / шаг зубца== (200 * 32) / 0,8 = 8000
steps_per_mm = (шаг двигателя* микрошаг драйвера) / (диаметр шестерни* пи)
= (200 * 32) / (7 * 3,1415926) = 291,02618
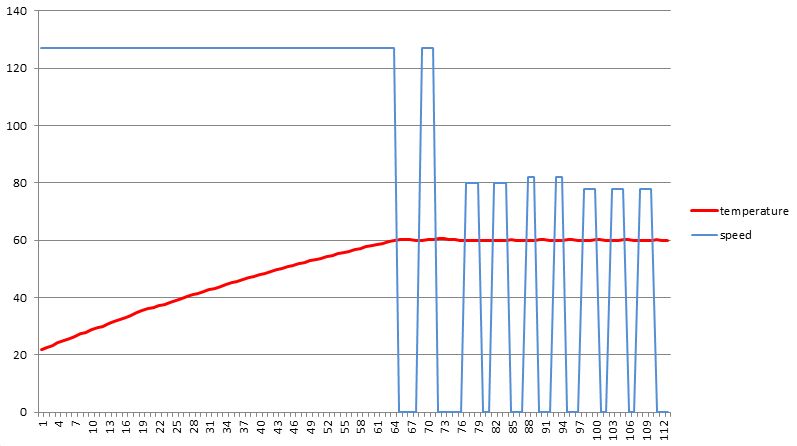
Величины нагрева (нужна калибровка, вентилятор всегда на 100%)
Шаг 9: Настройка и калибровка
Некоторые компоненты мозгоподелки требуют калибровки перед использованием. В этом помогут пункты этого шага, выполняя которые можно повысить качество печати.
Для тестирования экструдера я использовал настройки Prusa по умолчанию из предыдущего шага, и после разогрева экструдера удалось выдавить некоторое количество PLA. Но для качественной печати придется провести вычисление требуемых параметров, затем изменить файл конфигурации и загрузить его на ATmega. Кстати, перезагрузку файла нужно проводить после каждого изменения.
С помощью софта Marlin контролируется нагрев стола и экструдера, и для этого нужно установить правильные температурные значения этих объектов. При включении принтера включается нагрев стола — через резистор течет ток и стол нагревается, при достижении нужной температуры нагрев стола отключается. При этом, вследствие задержек между повышением температуры и выключением нагрева, заданная температура будет немного превышаться. ПИД параметры хранят температурные характеристики стола и экструдера, и это позволяет замедлить нагрев при достижении нужной температуры во время печати.
Консоль дает результаты:
bias: 78 d: 78 min: 59.79 max: 60.19 Ku: 504.75 Tu: 10.22
Classic PID Kp: 302.85 Ki: 59.24 Kd: 387.04
Автонастройка ПИД закончена и нужно записать последние значения Kp, Ki, Kd в файл сonfiguration.h
После настройки нагревательного стола настраивается экструдер. Он имеет более высокое значение температуры:
M303 S190 E0 C8
Мои первые результаты таковы:
bias: 65 d: 65 min: 186.25 max: 194.55 Ku: 19.95 Tu: 51.51
Classic PID Kp: 11.97 Ki: 0.46 Kd: 77.09
Автонастройка ПИД закончена и нужно записать последние значения Kp, Ki, Kd в файл сonfiguration.h
Настройка продолжается до тех пор, пока значения перестанут изменяться. При этом процесс настройки всегда начинается с холодных стола и экструдера. Мои окончательные результаты таковы (не используйте их в своем принтере, определите свои!):
Судя по инструкции параметры для сборки PrusaI3 таковы:
Но все эти значения не подходят к моему мозгопринтеру и нужно вычислять верные самостоятельно, что и вам рекомендую. Окончательные параметры таковы:
Отличие всего лишь в 2.52 шаг/единицу, но разница в качестве заметна.
Мои вычисления следующие:
steps_per_mm = (шаг двигателя * микрошаг драйвера) / (диаметр шестерни* пи) = (200 * 32) / (7 * 3,1415926) = 291,02618
Но это в теории, а на практике все по-другому. Экструдер работал абы как, еще потому что я выставил неверное значение диаметра сопла. После установки верного диаметра 0.3мм принтер стал выдавать слишком много нити, и я думал что это из-за удвоенного значения, может микрошаг драйвера не 1/32, а 1/16. От подачи (с помощью Pronterface) 10см нити сопло использовало лишь 5.4см, поэтому я умножил мои значения на 0.54 и повторил тест после перезагрузки прошивки принтера. И наконец, со значением 191 шаг/мм, принтер выдавал нужное количество 100мм нити.
Этот процесс подробно описывается в Reprap wiki — Leveling the Print Bed.
По умолчанию размер сопла выставлен 0.5мм, а фактический размер 0.3мм, поэтому требуется изменить настройки в программном обеспечении перед печатью. Моя первая тестовая печать оказалась неудачной, так как я использовал значение по умолчанию, что привело к неправильной подачи нити и слишком большой высоте слоя.
Шаг 10: Печать

На данном этапе, хотя и нужна некоторая калибровка, принтер работает нормально. В дальнейшем мне нужно изменить параметры нити.
Оси принтера должны двигаться плавно, мозгодвигатели не должны делать пропуски. С этими проблемами, кстати, я столкнулся во время первой печати.
Данное видео показывает работу Lego-принтера до калибровки.
Будет полезно обучиться работе в Pronterface и научиться создавать stl-файлы. Себе я скачал несколько уроков и учусь управлять 3D-принтером, а научившись чему-либо полезному поделюсь.
Доработка на 3 июня 2015:
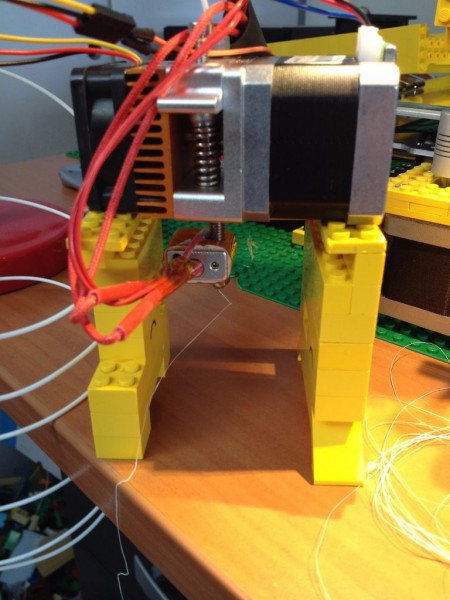
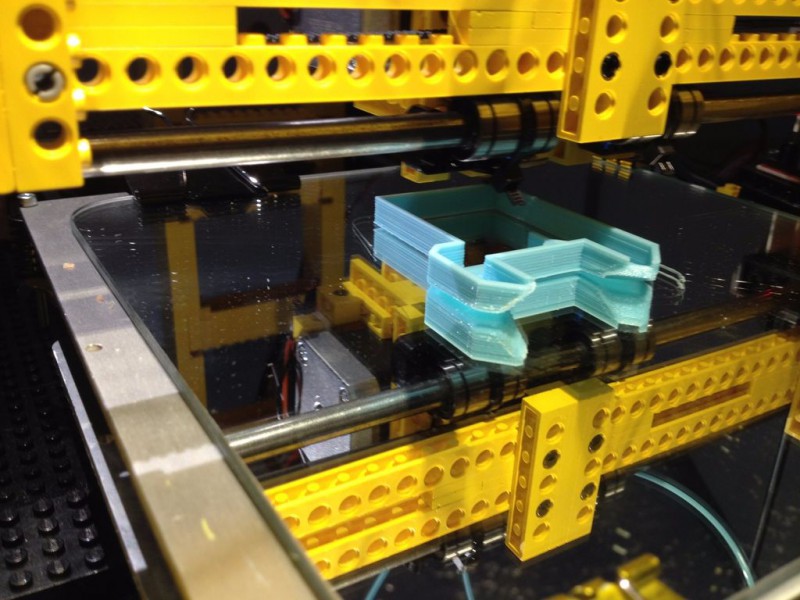
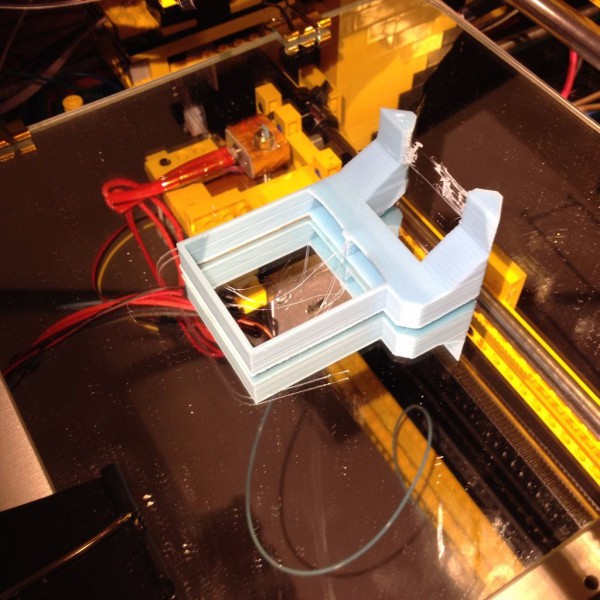
Мне удалось поменять настройки Pronterface изменив вручную GCode (выставить высоту слоя 0.1мм). Далее я скачал stl-файл и начал печать. Все шло нормально, но потом принтер начал делать пропуски по осям X и Y. Причина оказалась в том, что подшипник LM8UU, купленный на популярном ресурсе, не скользил как должен. После замены подшипников (во время которой я сделал несколько фото Y-каретки) я снова запустил печать и все прошло отлично!
Полностью завершать печать я не стал, так как не хватило нити, да и заняло бы это 7 часов. Хотя понижения процента заполнения может решить обе проблемы.
Шаг 11: Печать LEGO-блока


Доработка на 5 июня 2015:
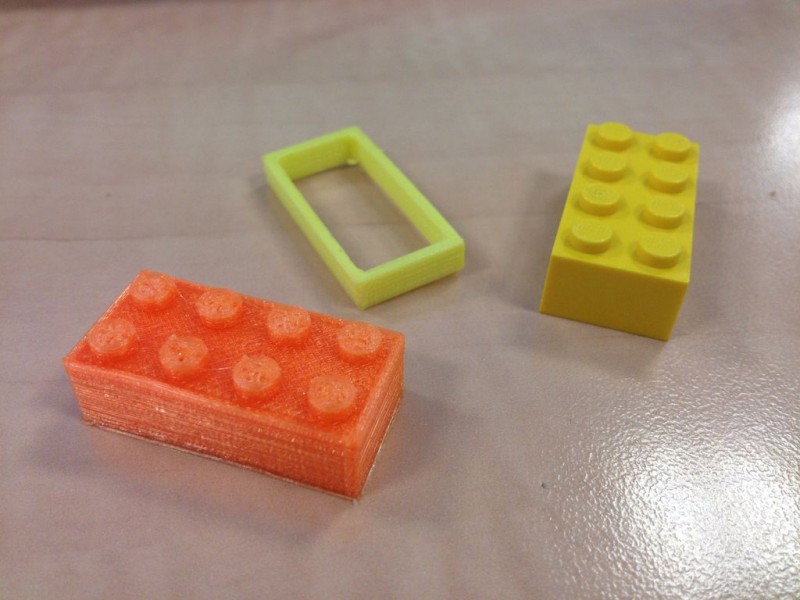
Решил посмотреть — сможет ли поделка распечатать Lego-блок. Скачал stl-файл с Lego-кирпичиком и со второго раза, с высотой слоя 0.2мм получилось все-таки распечатать кирпичик. Может не совсем идеальный, но достаточно точный (первое фото). Заняло это всего 25 минут времени.
Во время первой распечатки кирпичика, с значением высоты слоя 0.1мм, нить отставала от нагревательного стола. Уменьшение вдвое высоты слоя удвоит время печати, но кирпич получится более качественный.
На втором фото показаны первый кирпичик (оранжевый), кирпичик второй попытки и настоящий Lego-кирпич.
Доработка на 8 июня 2015:
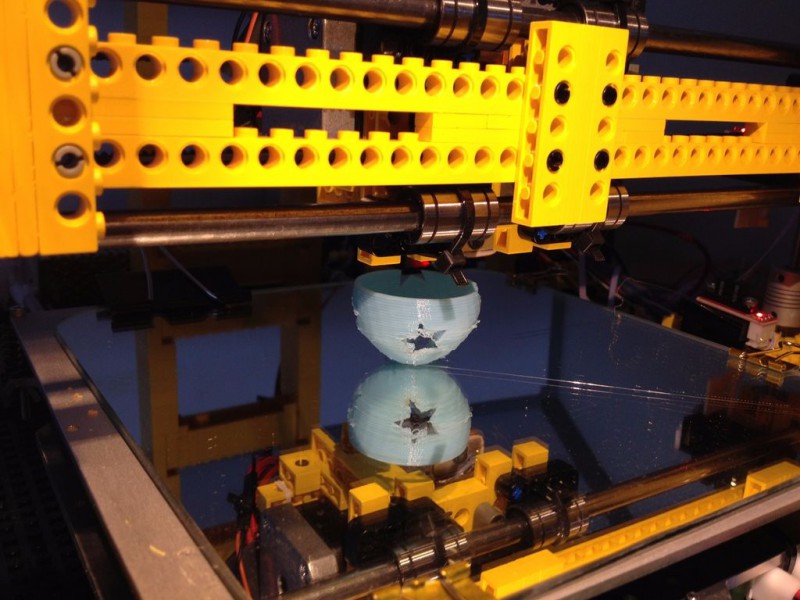
Откалибровал подачу сопла (шаг калибровки), скачал stl-файл полого мячика и запустил печать. Расчетное время печати с высотой слоя 0.2мм составит 1 час 37 минут (и 1746см нити).
На одном из своих видео процессов печати я увидел отклонение влево ремня оси X, поэтому я заменил Lego-колесико в конце ремня на настоящий шарикоподшипник. Это дало повышение качества при последующей мозгопечати.
Шаг 12: Первая не пробная печать

Дважды распечатав полый шарик, я заметил, что нить слишком долго остается расплавленной, особенно на свесах и перемычках, и в результате шарик получается овальным, а не круглым. Наверное по этой причине многие принтеры имеют дополнительное охлаждение рядом с соплом.
В поисках решения этой проблемы я нашел кожух вентилятора, который устанавливается на экструдер и охлаждает печатную головку самоделки. Для его установки нужно изменить каретку экструдера, а сам кожух установить на радиатор вертикально.
Доработка на 20 июня 2015:
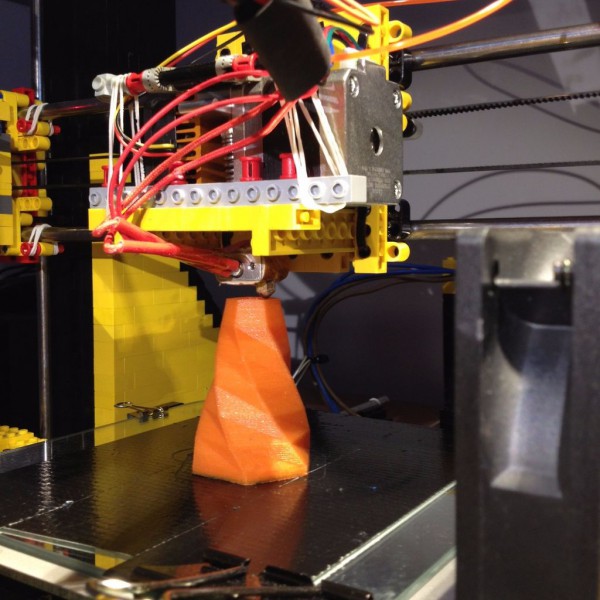
Первым завершенным распечатанным объектом стала полигональная ваза, которую я распечатал по закаченному и немного модифицированному файлу в пропорции 3:22.
Поделка работает не как Lego-игрушка, а как настоящий 3D-принтер. Обновленные оси X и Y дают действительное повышение качества печати.
Шаг 13: Улучшения
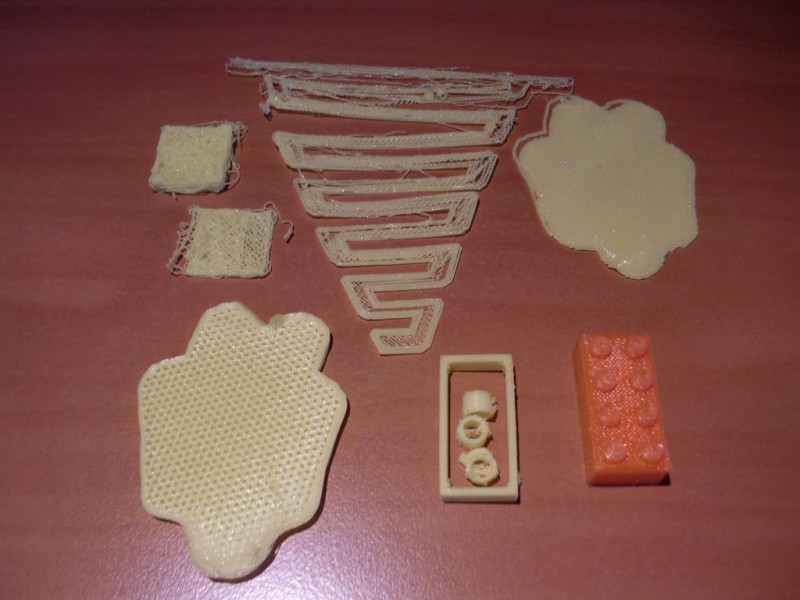


Полный список результатов и изменений таков:
— Два первых теста (квадратные пластинки): большинство параметров прошивки стоят по умолчанию, без калибровки.
— Стопор двери: регулировка параметров X и Y на основе измеренных значений первой печати. Видны пропуски работы шаговых двигателей.
— Третья и четвертая попытка: между этими распечатками были заменены все подшипники и сокращена подача нити.
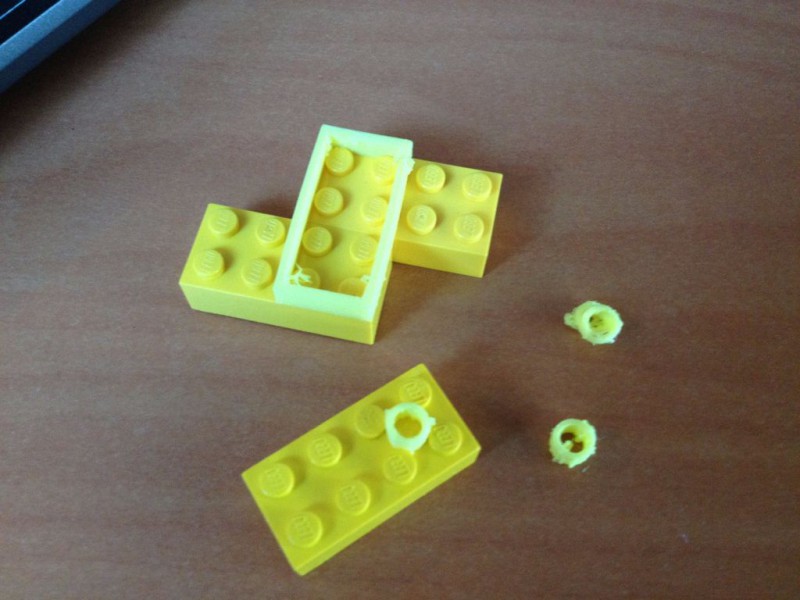
— Первый Lego-кирпичик (желтый): нить отстает от нагревательного стола. Печать слоем 0.1мм дает хороший результат.
— Lego-кирпич с высотой слоя 0,2 мм.
Все результаты в довольно быстрые сроки.
Последующие улучшения (уже выполненные)
Главное преимущество создания мозгопринтера из Lego-блоков в том, что его конструкцию можно изменить. Одной из проблем возникших в процессе сборки было соединение оси Z c 5мм резьбовым стержнем, и решилась эта проблема установкой трубки от анкера (см. фото).
Позднее я приобрел 2 муфты двигателя М5 оси Z, они цельнометаллические и имеют внутреннюю резьбу, их можно использовать вместо больших металлических пробок. Красный технический кирпичик 1х8 (последнее фото) оси Z соединен с муфтой и вследствие чего, вся ось может свободно перемещаться по резьбовому стержню.
А теперь сайты полезные для сборки мозгопринтера:
И на этом руководство по созданию Lego-поделки завершено, надеюсь было полезно.
Руководитель: Кузнецов Алексей Александрович.
Из ЛЕГО могут быть созданы предметы, заменяющие различные электроприборы. Такая идея может показаться глупой, но такие проекты полезны в образовательных целях. Lego Mindstorms - это развивающий конструктор для детей и подростков.
Устройство с механической (электрической) системой управления собрано в образовательных целях и используется на уроках информатики. на которых дети имеют возможность программировать принтер из Lego Mindstorms 2.0.

«STALKER ver. 2.0»– это даже не принтер, а самый настоящий робот. Используя его, можно изучить не только, как работает принтер, но и программы для рисования.
Описываемая конструкция включает в себя сотни кубиков конструктора LEGO, моторы, провода, датчики и держатель для маркера, с помощью которого принтер оставляет изображения на бумаге.
Но не стоит забывать, что это прототип устройства, сконструированный тринадцатилетним подростком. Собрав принтер, он был в восторге, но сталкивался с различными проблемами: при втягивании в себя бумагу, принтер зажёвывал её. Вторая проблема была в том, что печатающая головка моталась и была нестабильной.
После устранения проблемы появилась вторая версия прототипа принтера, которая превосходит предшественника во всём. Главным плюсом стало наличие лотка для подачи бумаги. Так появился принтер из Lego Mindstorms «STALKER ver. 2.0».
15 января 2016 года на базе Пензенского государственного университета прошла VII областная научно-практическая конференция обучающихся по конструкторской , научно-исследовательской и изобретательской деятельности «Эврика».
Победителем в секции «Роботехника» стал автор проекта принтера из Lego Mindstorms «STALKER ver. 2.0» Даниил Столяренко, обучающийся в МБОУ лицея № 21 города Кузнецка. ( руководитель - учитель информатики, Кузнецов Алексей Александрович).
Победители и призёры награждены дипломами Министерства образования Пензенской области и рекомендованы для участия в конкурсе научно-технического творчества обучающихся Союзного государства «Таланты XXI века», который пройдёт в 2017 году в Белорусии.
Использованные компоненты: Конструктор LEGO Mindstorms NXT 2.0
, , , , , , , ,


Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.

Посмотреть, как робот рисует логотип сайта ПрогХаус, можете на следующем видео:
Автором проекта является Christophe Avenel. Страничку проекта вы можете найти здесь. В оригинальной конструкции робота используются детали из домашнего набора конструктора, плюс две шестерёнки из образовательного набора и три детали распечатанные на 3D-принтере. Моя конструкция такая же, но я собрал этого робота, используя только детали из базового образовательного набора. При этом размеры рук совпадают и можно использовать оригинальную авторскую управляющую программу без изменений.
Собираем робота-художника EV3 Print3rbot
Сначала я сразу дам схему сборки робота-художника EV3 Print3rbot, а затем напишу, как оживить его. Кроме базового образовательного набора LEGO Mindstorms EV3 (45544) вам понадобятся ещё фломастер диаметром около 8 мм и 4 резинки для денег. Более тонкий фломастер не подойдёт, т.к. он будет стоять неровно, и будет болтаться. Итак, вот схема сборки робота:
Инструкция для сборки робота-художника EV3 Print3rbot из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии от 24.03.2017 добавлены забытые необходимые детали.
Фломастер вставляйте сверху вниз, а после того как вы просунули его на достаточное расстояние, чуть потяните его обратно вверх, чтобы он прочно закрепился. После этого зафиксируйте его резинками, как показано на картинке, чтобы он не болтался. Резинки, которые держат фломастер, должны быть хорошо натянуты.
Две другие резинки нужны, чтобы руки робота не люфтили. Эти две резинки тоже должны быть хорошо натянуты. Если вы оттягиваете руки робота, то эти резинки должны возвращать их назад.
Установка ev3dev
Управляющая программа работает на прошивке ev3dev, поэтому сначала нужно установить на EV3 эту прошивку. Как это сделать написано в статье «ev3dev – устанавливаем и настраиваем Debian Linux на LEGO Mindstorms EV3». Там же написано, как выполнять команды на EV3 и как копировать файлы на EV3, поэтому эту статью читайте обязательно.
Обратите внимание, что версия ev3dev должна быть ev3dev-jessie-ev3-generic-2017-02-11 или более поздняя.
Установка управляющей программы
Управляющая программа написана на языке программирования Python (Питон). Чтобы установить программу нужно просто скопировать нужные файлы в EV3. Здесь есть два способа.
1. Если EV3 подключен к интернету, то вы можете выполнить следующую команду:
Так вы скопируете на свой EV3 последнюю версию необходимых файлов непосредственно из репозитория проекта. После копирования файлы будут находиться в папке /home/robot/ev3-print3rbot.
2. Вы можете скачать папку ev3-print3rbot со всеми необходимыми файлами со страницы проекта (для этого нажмите на кнопку «Clone or download» и выберите пункт «Download ZIP») к себе на компьютер.

Или скачайте чуть более старую версию файлов, которую использовал я, по ссылке ниже.
Управляющая программа для робота-художника EV3 Print3rbot.
После скачивания, распакуйте архив ev3-print3rbot-master.zip, переименуйте папку «ev3-print3rbot-master» на «ev3-print3rbot» и скопируйте её в директорию /home/robot на EV3.
Подготовка изображений
Управляющая программа работает только с векторными рисунками формата SVG, причём только с такими SVG-файлами, которые не содержат трансформации. Чтобы конвертировать любой SVG-файл, вы можете воспользоваться программой Inkscape. Для этого скачайте и установите на компьютер Inkscape. Затем запустите программу, выберите меню «Правка -> Параметры», в диалоге настроек найдите «Поведение -> Трансформация» и удостоверьтесь, что выбран режим сохранения трансформаций «С оптимизацией». После этого закройте окно с параметрами и закройте программу Inkscape.

Теперь вы можете конвертировать файл следующей командой:
где «C:\Program Files\Inkscape\inkscape.exe» - это путь к программе Inkscape на вашем компьютере, image1.svg – это путь к вашему файлу, а всё остальное – это действия, которые будет делать Inscape. После выполнения команды, файл будет подготовлен для того, чтобы его мог использовать робот-художник.
Перед началом рисованием размер рисунка будет подогнан под размеры области рисования, поэтому реальный размер изображения не имеет значения.
Готовый файл скопируйте на EV3 в папку /home/robot/ev3-print3rbot/images.
Запуск управляющей программы
Прежде чем запустить программу поменяйте текущую папку, если вы ещё этого не сделали, с помощью команды:
Затем откройте в редакторе файл writer.py, найдите в конце строку:
Здесь test.svg – это файл, который робот художник будет рисовать. Файл test.svg уже есть в папке images, так что вы можете, ничего не меняя, сразу запустить программу и посмотреть, что нарисует робот-художник. А вот, чтобы робот нарисовал другой рисунок, используя ваш SVG-файл, замените имя test.svg на имя своего файла, например, image1.svg. Обратите внимание, что перед запуском программы ваш SVG-файл должен быть подготовлен и скопирован в папку images как об этом уже было написано выше.
Файл, который робот рисует на видео, вы можете скачать здесь:
Логотип ПрогХаус в формате SVG для робота-художника EV3 Print3rbot.

Запустите управляющую программу командой:
После этого робот, поднимет руки вверх, затем сложит их и начнёт рисовать.
Запуск управляющей программы из меню ev3dev
Кроме способа описанного выше вы можете запустить управляющую программу прямо из меню ev3dev. Для этого найдите с помощью проводника файл writer.py и выберите его (т.е. нажмите на центральную кнопку EV3). После этого управляющая программа запустится.
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Робот Evolta отправится в 49-дневное путешествие
Робот Evolta, который несколько лет назад уже демонстрировал возможности батареек Panasonic, отправится в новое путешествие. Если в 2008 году робот смог взобраться по 530.
![]()
Из записок сумасшедшего робота
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Читайте также: