
Инструкция сборки захвата лего ев3
Обновлено: 19.04.2024
Соберите моторизованный инструмент для перемещения объектов.

План урока
1. Подготовка
- Ознакомьтесь с материалами для учащихся в приложении Education EV3 Classroom.
- Соберите информацию о моторизованных инструментах и о том, как они используются в робототехнике.
- К концу урока ученики должны собрать модель Приводной платформы. Это займёт около 30 минут.
- Используйте идеи, приведенные в разделе Начало обсуждения, чтобы вовлечь учеников в дискуссию по теме урока.
- Разделите класс на пары.
3. Исследование (20 мин.)
- Попросите каждую пару учащихся собрать Кубоид и устройства «Средний мотор» и «Ультразвуковой датчик» для своих Приводных платформ.
- Дайте им время воспользоваться предоставляемыми подпрограммами, чтобы понять, как переместить Кубоид с помощью моторизованного инструмента.
4. Объяснение (5 мин.)
- Обсудите основные особенности и ограничения устройства «Средний мотор».
5. Дополнение (15 мин.)
- Дайте учащимся задание запрограммировать Приводную платформу так, чтобы она с помощью Ультразвукового датчика остановилась возле Кубоида, опустила манипулятор, захватила Кубоид и вернула его на место.
- Не забудьте оставить время на уборку.
6. Оценка
- Дайте оценку работе каждого учащегося.
- Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Для выполнения различных задач роботов можно оснащать моторизованными инструментами. Некоторые из них «заточены» под одну конкретную задачу, другие — более универсальны.

Используйте эти вопросы для начала дискуссии о том, как роботы могут использовать моторизованные инструменты.
- Какие задачи должен выполнять моторизованный манипулятор?
- В каких ситуациях вы бы выбрали узкоспециализированный моторизованный инструмент?
- Когда лучше использовать универсальный инструмент?
Советы по сборке

Инструкции по сборке
Не разбирайте Приводную платформу после использования.
Советы по программированию
Основная программа
Пример решения
Индивидуальный подход
Способы упростить задание
- Позвольте ученикам разместить Кубоид на известном фиксированном расстоянии.
- Уделите больше времени разъяснению, как использовать Ультразвуковой датчик.
Способы сделать задание ещё интереснее
- Попросите учащихся модифицировать устройство «Средний мотор» так, чтобы можно было перемещать предметы разных форм и размеров.
- Дайте им задание создать собственные инструменты для Приводной платформы.
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
- Задание выполнено частично.
- Задание выполнено полностью.
- Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся умеют передвигать и ставить предметы с помощью моторизованного инструмента.
- Учащиеся могут определить, когда активировать моторизованный инструмент, с помощью Ультразвукового датчика.
- Учащиеся могут дополнить программу так, чтобы вернуть предмет на стартовую позицию Приводной платформы.
Самостоятельная оценка
Попросите каждого ребёнка выбрать уровень, который, по его мнению, соответствует качеству его работы на занятии.
- Бронзовый. Я переместил (-а) и отпустил (-а) Кубоид с помощью моторизованного инструмента.
- Серебряный. С помощью Ультразвукового датчика я вовремя активировал (-а) моторизованный инструмент, чтобы переместить и отпустить Кубоид.
- Золотой. С помощью Ультразвукового датчика я вовремя активировал (-а) моторизованный инструмент, чтобы переместить Кубоид на стартовую позицию Приводной платформы.
- Платиновый. С помощью Ультразвукового датчика я вовремя активировал (-а) моторизованный инструмент, чтобы переместить различные предметы на стартовую позицию Приводной платформы.

Развитие языковых навыков
Для разностороннего развития языковых навыков предложите ученикам
- Подготовить и провести презентацию работы Приводной платформы с моторизированным инструментом, уделяя особое внимание её преимуществам, использованным компонентам и т. д.
Примечание. Для выполнения этого задания требуется дополнительное время.
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности.
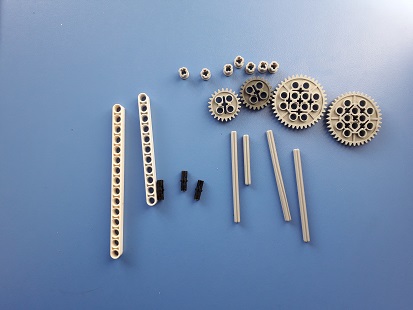
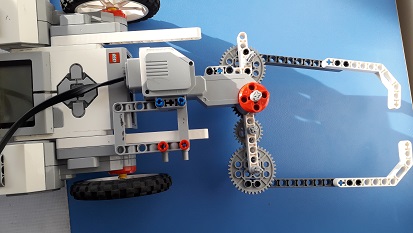
Захват лего ev3 используется в соревнованиях по робототехнике для захвата и перемещения объектов по полю соревнования. Механизм захвата ev3 должен не только захватить объект но и крепко его удерживать, поэтому он должен быть сделан на базе редуктора. Часто захват для робота ev3 делают на основе червячной передачи, но такой захват очень медленный и ограничен по размерам. Поэтому мы предлагаем создать очень простой захват ev3 на основе простого редуктора на шестеренках.
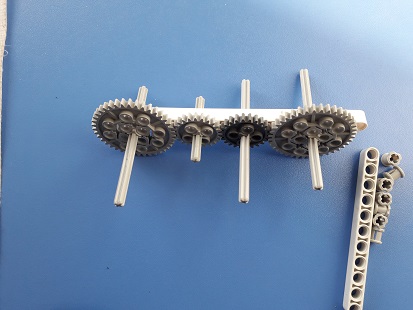
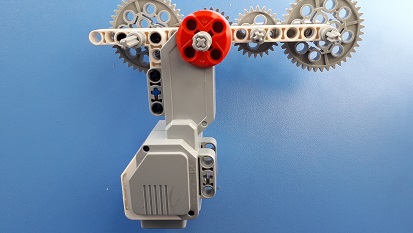
Подробная схема захвата ev3

1

2
3
4

5

6

7
8
9
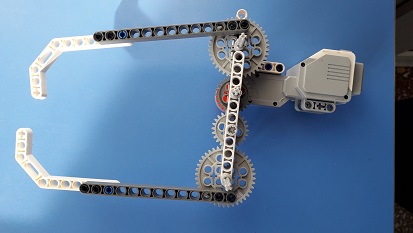
Крепим манипулятор захват к подвижной платформе ev3
10
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Робот R2D2 из мусорного бака часть 1 и 2
Часть 1 и 2: Мод R2-D2 – это ультрабюджетный проект, который может обойтись всего в 100-200 долларов. Основа этого мода – по сути списанный мусорный бак, от которого вооб.

Без конечностей: этажерка на шаре держит равновесие
Забудьте 'Девочку на шаре'. Смотрите: на шаре мобильный робот. Этот шар для него — и ноги, и колёса, и гусеницы. В общем, точка опоры, с помощью которой он переворачивает.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

«Божья коровка » поможет фермерам
NAO Next Gen » Разные японские роботы
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.


Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
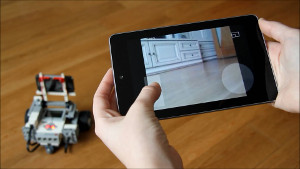
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.


Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» - разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй - на 20 и третий - на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:

Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Читайте также: