
Как разобрать разъем лего
Обновлено: 06.05.2024
Информация о внутреннем устройстве портов и кабелей будет полезна при конструировании собственных датчиков, расширителей портов или подключении каких-либо других самодельных устройств. Далее в этой главе будет рассмотрено назначение каждой линии входных и выходных портов, а также передаваемых по ним сигналов. Назначение каждого провода кабеля зависит от того, подключен кабель к входному или выходному порту. При подключении датчиков назначение проводов также зависит от типа подключаемого датчика.
Представленная здесь информация справедлива, в первую очередь, для набора Mindstorms NXT. Для набора EV3 могут быть отличия (назначение сигналов кабелей такое же, а вот возможности драйверов двигателей могут отличаться). Для более детального изучения советую почитать NXT Hardware Developer Kit и EV3 Hardware Developer Kit. Это официальное описание аппаратной части (схемы контроллера, датчиков, моторов и т.д.) конструкторов Mindstorms от компании LEGO.
 |  |
| Внешний вид портов датчиков | Внешний вид портов моторов |
| Плата контроллера, вид с двух сторон | |
| Плата Bluetooth-модуля крупным планом |
При внимательном рассмотрении прозрачных разъёмов стандартных соединительных кабелей из комплекта, можно увидеть 6 проводов различных цветов: белый, черный, красный, зелёный, желтый и синий. Разъёмы портов контролера NXT и стандартных кабелей визуально напоминают стандартные телефонные разъёмы типа RJ-12 (на самом деле под обозначением RJ-12 имеются в виду разъёмы типа RJ-25 или 6p6c). Однако при внимательном рассмотрении можно заметить, что замок разъёмов соединительных кабелей из набора «LEGO MINDSTORMS» смещен вправо (если держать разъём замком к себе), а у разъёма типа RJ-12 замок находится ровно посередине. Таким образом, компания «LEGO» принуждает пользователей к использованию оригинальных кабелей во избежание поломок контроллера или других элементов конструктора. В интернете можно найти подробные инструкции по изготовлению разъёмов аналогичных разъёмам оригинальных кабелей из набора, либо сразу купить готовые разъёмы.

Порты датчиков: назначение контактов и описание сигналов
Ниже в таблице указаны номер контакта, цвет и назначение каждого провода при подключении кабеля к входному порту.
Контакт 1 – Белый провод – AN – может использоваться для двух целей: как аналоговый вход или как выход питания 9 В. Контроллер подает напряжение питания на этот контакт в течение 3-х миллисекунд, а затем считывает аналоговое значение в течение 0,1 мс. В режиме аналогового входа данный контакт подключается к аналого-цифровому преобразователю (АЦП). Для исключения повреждения АЦП входной сигнал должен находиться в пределах от 0 до 5 В. АЦП преобразует входной сигнал в цифровое значение от 0 до 1023. Согласно документации частота дискретизации составляет 333 Гц (у EV3 частота уже 1 кГц). На время считывания сигнала контакт «подтягивается» к линии 5 В через резистор номиналом 10 кОм находящийся внутри блока. Наличие данного резистора значительно упрощает схемотехнику большинства датчиков.
При использовании первого контакта в качестве 9-вольтового источника питания для датчиков, необходимо учитывать, что напряжение питания на этом контакте будет равно напряжению источника питания контроллера NXT. Поэтому при использовании никель-металлогидридных (NiMH) аккумуляторов с этого контакта можно получить напряжение около 7,2 В или меньше. Это напряжение используется для питания стандартных и самодельных датчиков, которым недостаточно 5 вольт, в частности, ультразвуковой датчик NXT использует его для увеличения мощности своего передатчика. Все датчики RCX, подключаемые через адаптер (переходник), используют для своей работы именно эту линию.
Поскольку питание на этот контакт подаётся с перерывами, датчику обычно требуется конденсатор, чтобы поддерживать напряжение питания на время чтения данных. Ограничение по току нагрузки на этом контакте составляет примерно 14 мА на каждый порт. Если ток нагрузки превышает это значение, напряжение значительно падает, что может привести к некорректной работе датчика.
Контакты 2 и 3 – Чёрный и красный провода – GND – общая земля. Эти два контакта соединены вместе внутри блока NXT и внутри стандартных сенсоров LEGO. Все сигналы измеряются и формируются относительно этих общих контактов.
Контакт 4 – Зелёный провод – Питание 4.3 В – основная линия питания для стандартных датчиков NXT. Новые цифровые микросхемы, рассчитанные на 5-вольтовую логику, вполне могут быть запитаны от него, но бывают случаи, когда этого напряжения оказывается недостаточно для стабильной работы. В отличие от 9-вольтовой линии питания, этот выход обеспечивает суммарный ток 180 мА для всех входных и выходных портов. Каждый порт может использовать в среднем 25 мА (180 / 7 = 28,71 мА), но вполне допустимо увеличить потребление одного или нескольких портов, если остальные порты потребляют меньше или не задействованы. Стандартные датчики из набора, а также датчики оборотов сервомоторов потребляют в среднем около 20 мА.
Контакты 5 и 6 – Жёлтый и синий провода – DIGAI0 и DIGAI1 – данные линии используются для передачи данных. Контакты используют цифровые сигналы уровня 3,3 В и непосредственно подключены к микропроцессору контроллера NXT. В основном они используются для связи по протоколу I2C (DIGAI0 как SCL и DIGAI1 как SDA), но также могут использоваться как обычные сигнальные линии. При использовании линий как входов контроллер NXT ограничивает ток для защиты линий микропроцессора от повреждений. Защита реализована через последовательно включенные ограничительные резисторы номиналом 4,7 кОм. В режиме выхода уровень напряжения на контактах не должен превышать 3,3 В. При работе с данными контактами необходимо соблюдать осторожность, поскольку ошибка может привести к повреждению линий микропроцессора внутри контроллера NXT.
Помимо протокола I2C, контакт DIG0 используется датчиком освещённости для переключения состояния встроенного светодиода подсветки (включен или выключен) и датчиком звука для переключения между режимами DB (абсолютная громкость звука) и DBA (уровень звука, приравненный к чувствительности человеческого уха).
Порты моторов: назначение контактов и описание сигналов
Ниже в таблице указаны номер контакта, цвет и назначение каждого провода при подключении кабеля к выходному порту.
Контакты 1 и 2 – Белый и чёрный провода – MA1 и MA2 – линии питания сервомотора. Максимальное напряжение равно напряжению источника питания контроллера. Для управления питанием двигателей робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такие устройства называют драйверами двигателей, они изготавливаются в виде микросхем разной мощности.
Схемотехнически драйвер, управляющий питанием двигателей, представляет собой H-мост – это электронная схема, которая позволяющая приложить напряжение к нагрузке в разных направлениях. Термин Н-мост появился благодаря графическому изображению этой схемы, напоминающей букву Н.
Н-мост собирается из 4 транзисторов (реле, переключателей). В зависимости от управляющих сигналов открывается та или иная пара транзисторов, при этом два других транзистора закрыты. На рисунке ниже показана электрическая схема H-моста, а также указано направление вращения двигателя для двух различных состояний управляющих сигналов. Схема имеет два управляющих входа, обозначенных буквами A и B. Исходя из того, что H-мост управляется цифровыми сигналами (ноль или единица), возможны 4 состояния входных сигналов.

При значениях A = 1 и B = 0 (левая схема на рисунке выше) транзисторы VT1 и VT3 открываются, по двигателю начинает протекать ток, что приводит к вращению двигателя вперёд (forward). Если поменять значения входных сигналов на противоположные и подать на схему значения A = 0 и B = 1 (правая схема на рисунке выше)), то это приведет к закрытию транзисторов VT1, VT3 и открытию транзисторов VT2, VT4. Направления протекания электрического тока поменяется, следовательно, изменится и направление вращения двигателя – он станет вращаться в обратном (reverse) направлении.
Также Н-мост позволяет электрически тормозить двигатель, накоротко замыкая его выводы (brake). Для этого необходимо подать сигнал высокого уровня на оба входа (A = 1 и B = 1). А если на оба входа подать сигнал низкого уровня (A = 0 и B = 0), то двигатель можно будет свободно вращать (coasting), как и при отключенном питании.
При использовании H-моста с двигателями постоянного тока в схему включают защитные (ограничительные) диоды (VD-VD4 на рисунке выше). Необходимость в диодах вызвана наличием токов при остановке двигателя, вследствие уменьшения электромагнитного поля внутри его обмоток.
В контроллере NXT используются две различных микросхемы H-моста. Для управления портом A задействована микросхема одноканального H-моста LB1930M, а порты B и C управляются микросхемой двухканального H-моста LB1836M. Допустимый выходной ток составляет примерно 800 мА для порта A и 500 мА для портов B и C. Пиковый ток может достигать тока в 1 А. Микросхемы имеет тепловую защиту, которая ограничивает ток при перегрузках или перегреве. Поскольку порт A допускает больший выходной ток, по сравнению с портами B и C, то зачастую он используется для управления манипулятором робота, а порты B и C – для управления движением робота.
В таблице ниже приведены уровни напряжений на выходе драйверов двигателей контроллера NXT для различных состояний входных сигналов, для входных сигналов за единицу принят сигнал высокого уровня, за ноль – низкого.
Проанализировав представленную таблицу можно сделать следующий вывод об особенности порта A: если к двигателю приложено напряжение и при этом двигатель в режиме торможения, то на линиях 1 и 2 будет сохраняться высокий уровень напряжения (9 В или 7,2 В в зависимости от типа источника питания).
Зависимость между скоростью вращения мотора и приложенным напряжением линейна. Поэтому для регулирования скорости вращения двигателя используется способ широтно-импульсной модуляции (PWM – pulse width modulation). Идея данного способа заключается в получении изменяющегося аналогового значения напряжения посредством особого алгоритма управления транзисторными ключами. ШИМ-сигнал моделирует напряжение между максимальным и минимальным значениями напряжения. Частота импульсов при этом остается постоянной, изменяется только коэффициент заполнения D – величина, отражающая процентное соотношение длительности времени включения максимального напряжения τ к длительности периода сигнала T. На рисунке ниже показаны графики ШИМ-сигнала для различных коэффициентов заполнения.

При использовании широтно-импульсной модуляции среднее напряжение на двигателе будет определяться отношением между временем, в течение которого ключ будет открыт и закрыт. Таким образом, управляя шириной импульса можно управлять напряжением, приложенным к двигателю, что в свою очередь позволяет регулировать его скорость вращения. Помимо двигателей, таким же способом можно управлять яркостью свечения светодиодов.
Длительность периода ШИМ для стандартной прошивки составляет 128 нс, что соответствует частоте 7,8 кГц, которая находится в слышимом диапазоне. Поэтому иногда можно услышать писк, исходящий от мотора. Это происходит, когда к двигателю приложено напряжение, а его вал не может провернуться. Например, если манипулятор робота достиг крайнего положения, а питание все еще подается.
Контакт 3 – Красный провод – GND – общий «земляной» контакт. Контакты 2 и 3 соединены между собой в датчиках, но не в моторах. Если датчик будет случайно подключен к порту мотора, питание мотора будет закорочено на землю. К счастью, в блоке есть защита на этот случай, но лучше лишний раз не ошибаться.
Контакт 4 – Зелёный провод – Питание 4.3 В – данный контакт подключен к линии питания 4,3 В, общей для всех портов блока. Питание с этого контакта используется тахометром сервомотора.
Контакты 5 и 6 – Жёлтый и синий провода – DIGAI0 и DIGAI1 – данные линии используются для получения сигналов от встроенного в сервомотор NXT оптического тахометра. Датчик оборотов генерирует прямоугольные импульсы, которые позволяют контроллеру NXT определить скорость и направление вращения мотора. Два импульса сдвинуты относительно друг друга на четверть периода сигнала. На рисунках ниже показаны графики сигналов, генерируемых датчиком оборотов при вращении мотора вперёд и назад соответственно. Частота импульсов зависит от скорости вращения мотора. Один полупериод сигнала соответствует одному градусу поворота мотора.
| Импульсы при вращении мотора вперёд | Импульсы при вращении мотора назад |
 |  |
Схема подключения датчиков
 |  |
 |  |
 |
Подключение своих устройств по I2C
К контроллеру NXT можно подключить различные устройства, работающие по протоколу I2C. Данная опция позволяет расширить функциональные возможности конструктора. Одним из простых примеров, описанных в книге Extreme NXT, является подключение I2C расширителя портов PCF8574 (документация). Данная микросхема имеет 8 линий и позволяет как вводить, так и выводить данные. То есть можно подключить к одному из портов плату с PCF8574, а к ней светодиоды или кнопки, общим количеством до 8 штук. Ниже показан пример подключения платы со светодиодами.

Для экспериментов были спроектированы два типа плат : первая только со светодиодами, вторая включала и кнопки. Ниже представлены схемы и внешний вид плат. Платы проектировались в САПР Diptrace.
Ниже показана уже готовая для экспериментов плата. Для подключения платы необходимо разрезать один кабель, напаять на каждый провод ответную часть (BLS) штыревого контакта (PLS) и натянуть термоусадку. Получается довольно удобно. Термоусадку лучше брать по цвету провода. Разрезать лучше самые длинные кабели. По опыту использования они реже пригождаются. Из одного кабеля можно изготовить два новых кабеля для экспериментов.
 |  |
| Внешний вид платы и переделанного кабеля NXT | Плата с PCF8574 крупным планом |
Программная часть писалась в RobotC. Описание функций для работы с I2C из RobotC приведено в вики на сайте разработчика. Также советую почитать материалы от Storming Robots (раз и два). Ниже представлены два примера программ.
Первая программа реализует поочередное мигание светодиодов. Сначала загораются светодиоды одного цвета (нечётные по порядку), а затем другого цвета (чётные по порядку).
При старте программы указывается тип датчика, подключённого к порту (значение sensorI2CCustom указывает, что используется I2C), размер массива передаваемых данных и адрес устройства. В нашем случае адрес равен 0x40. Общий вид адреса в двоичном виде 0b0100-A2-A1-A0-0, линии А0, А1 и А2 (пины 1, 2 и 3 микросхемы) определяют значение соответствующих битов адреса. На приведённой выше схеме все три линии подтянуты к земле (нулю), поэтому адрес равен 0b01000000 = 0x40. Одновременно можно подключить до 8 устройств.
После инициализации порта запускается бесконечный цикл передачи данных. Для начала данные добавляются в массив (полезные данные, которые необходимо переслать) и с помощью функции sendI2CMsg выполняется отправка массива. Для отправки надо указать порт, адрес массива в памяти (указатель на массив) и размер передаваемых данных (в байтах, в нашем случае это 1 байт). Далее ожидается завершение передачи и вызывается задержка на 500 мс для того, чтобы мигание светодиодов было наглядно видно. Передаваемый байт данных каждый раз инвертируется, чтобы светодиоды зажигались поочерёдно. Важно помнить, что светодиоды зажигаются низким логическим уровнем на линии.
Вторая программа реализует постоянный опрос кнопок на плате. На экран выводится значение, прочитанное из PCF8574.
Определить номер нажатой кнопки можно с помощью битовых операций. При использовании описанной платы выводится следующее:
- 243 – нет нажатых кнопок
- 247 – нажата только первая кнопка (SB1, подключена к 6-ому выводу PCF8574)
- 251 – нажата только вторая кнопка (SB2, подключена к 7-ому выводу PCF8574)
- 255 – нажаты обе кнопки
Таким образом, на базе миксросхемы PCF8574 можно собрать простой расширитель портов, способный работать как на вывод, так и на ввод данных. Например, можно к контроллеру подключить Arduino и передавать данные размером более 1 байта (показания датчиков, различные команды и так далее).
Кроме описанной микросхемы PCF8574, можно использовать и другие микросхемы с интерфейсом I2C. Например, PCF8591 – универсальный аналогово-цифровой и цифро-аналоговый преобразователь (документация). Микросхема PCF8591 обладает следующими возможностями:
Как оказалось, шустрые китайцы уже давно выпускают модуль для Arduino на данной микросхеме. Модуль скорее предназначен для обучения или экспериментов, а не для конкретных устройств. К аналоговым входам PCF8591 подключены фоторезистор, терморезистор и переменный резистор, а на выход ЦАП подключен светодиод. Внешний вид и схема модуля показаны ниже.

При подключении обогрева лобового стекла я попутно восстанавливал подключение обогрева зеркал. И в процессе обнаружил что один из проводов герметичной 3-х контактной колодки оторван от разъёма.
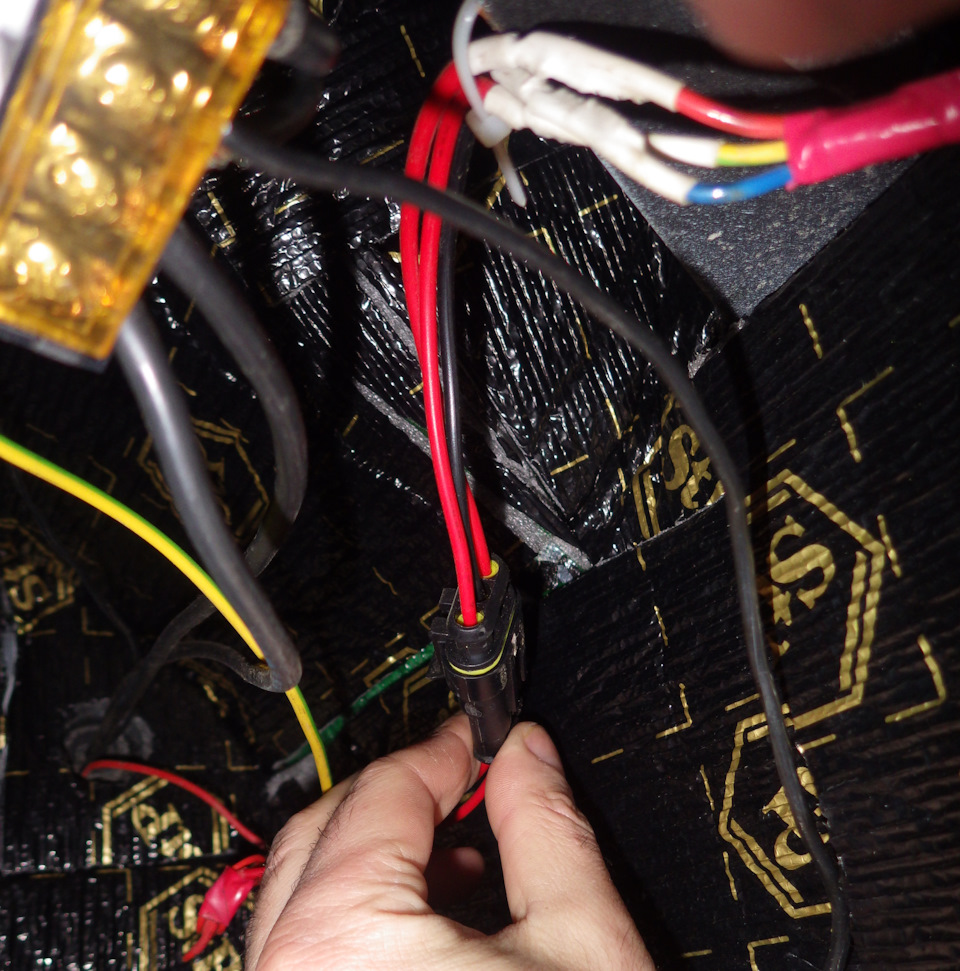
Новой такой колодки у меня не было, поэтому решил ремонтировать. Беглый поиск в интернете не выдал мне инструкцию как его разбирать. Поэтому я взял валявшийся в закромах 2-х контактный аналогичный разъём и стал его изучать, уничтожая и превращая в донора при этом. Не уверен что моя колодка-донор именно фирмы Cargen, но конструкция у них как минимум очень похожа.

Раскурочив колодку я понял, как её разбирать и решил поделиться полученными знаниями. Ну ещё наверное сказалось то, что я давненько не писал ни здесь, ни на своём литературном поприще. (Кому интересно, я пишу в жанре фэнтези и публикуюсь в интернете под псевдонимом С.Линд)
Для разборки нам потребуется заколка-невидимка или кусочек очень жесткой проволоки.

Один край заколки с помощью пассатижей или плоскогубцев нужно загнуть крючком, так что бы крюк был очень мелким, порядка 1,5 мм. Второй край оставляем прямым, саму невидимку немного разгибаем для удобства.
В первую очередь нужно вытащить красную пластиковую заглушку.
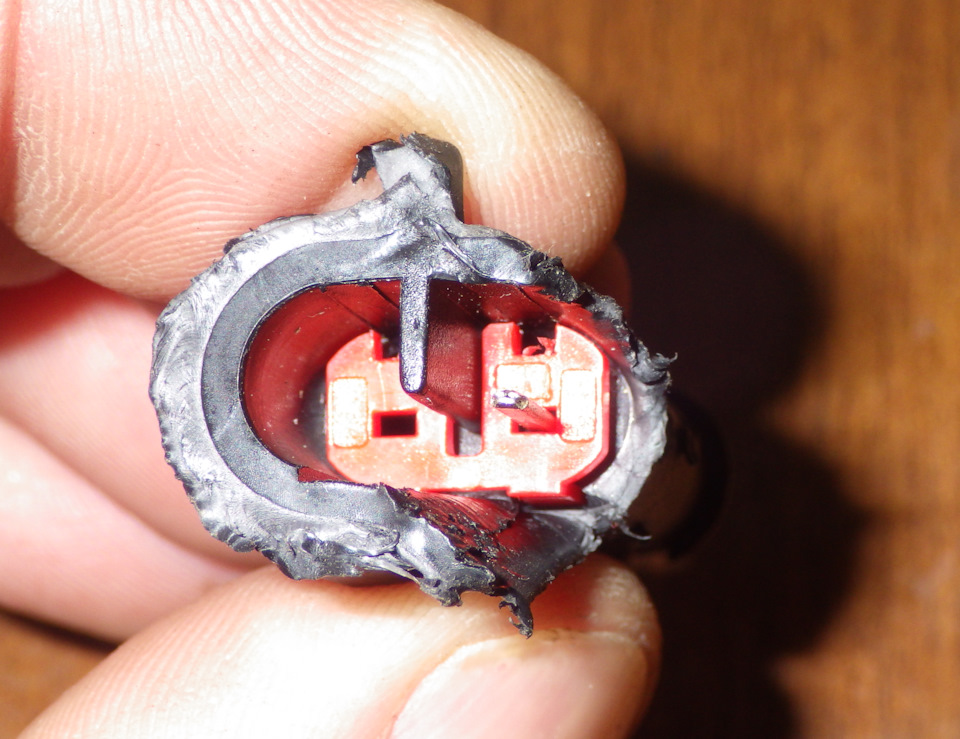
Для этого продеваем наш крючок через паз на краю заглушки и тянем.
Лучше тянуть за каждый паз поочерёдно. Заглушка достаточно туго сидит на защёлках, поэтому мягкая проволока тут не поможет.
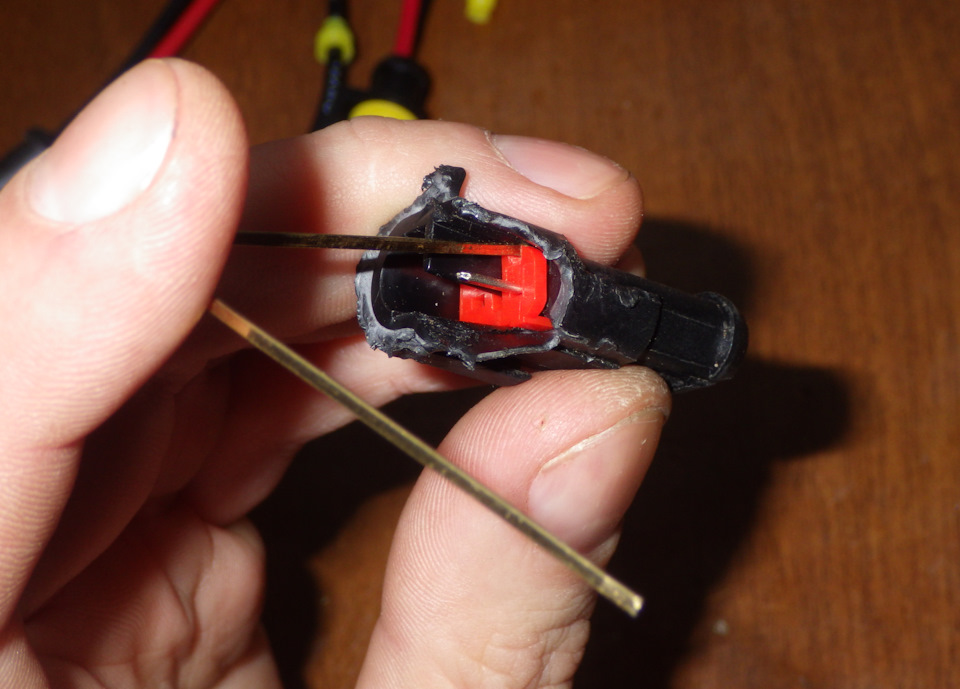
Далее в дело пускаем прямой конец заколки, вставляя его до упора вдоль клеммы, со стороны противоположной от защёлки самой колодки.

Затем, отгибаем пластиковую защёлку, находящуюся там внутри, отодвигая конец заколки от клеммы. Для удобства можно слегка изогнуть заколку дугой и использовать как рычаг. Попутно потихоньку тянем за провод и он выходит вместе с клеммой.
Ответная сторона разбирается аналогично.

Разница лишь в том, что красная заглушка снимается пальцами, а прямой конец нужно вставлять со стороны защёлки самой колодки.

Ранее, в теме про электровентилятор вместо вискомуфты я уже писал про применение заколок-невидимок для вытаскивания клеммы "Лира" из колодки ЭБУ, тогда потребовалось изготовить подобие пинцета.

В тот раз я подсмотрел способ вот здесь, у GAZ-Diagnosis , за что ему огромное спасибо. Сейчас же мне пришлось пожертвовать одной колодкой, но надеюсь, что кому-то смогу помочь этим постом.
Ситуация, при которой детки переламывают кабель моторов Lego WeDo 2.0, достаточно распространена. С переломанным кабелем моторы либо "глючат" (и надо найти правильное положение, в котором они работают) , либо вообще перестают вращаться.
Что делать? Покупать новый мотор? В наших реалиях - это дорого. Даже китайский аналог стоит порядка 15 единиц валюты.
Самое очевидное решение - попробовать отремонтировать.
Так случилось, что у меня как раз надломился кабель рядом с основанием мотора. В этом случае - ремонт достаточно прост - достаточно перепаять кабели.
ШАГ 1 - откручиваем винт
Фото мотора снизу Открутили винт
ШАГ 2 - снимаем кожух
Надо сказать, что по сравнению с WeDo 1.0 кожух на удивление легко снимается. На этот раз не нужно "подковыривать" защёлки - достаточно аккуратно подцепить очень тонкой отвёрткой в нескольких местах, постепенно ведя к защёлкам

Вставляем отвёртку и поддеваем крышку
Поддеваем кожух с одной стороны и немного отодвигаем:

Отодвигаем, но не снимаем полностью
Полностью не снимаем с одной стороны, чтобы не сломать защёлку с другой стороны - просто чуть поддеваем.
Переворачиваем

Точно также с другой стороны - начинаем с края и ведём к защёлке
Также поддеваем с другой стороны, направляясь к защёлке.
Теперь можно снимать до конца - он действительно хорошо снимается.

Поддеваем с другой стороны
ШАГ 3 - снимаем планетарный редуктор и вынимаем мотор
Всё легко отсоединяется. Мотор вынимал руками. Можно пассатижами за шпиндель мотора, если не получается руками
Сняли кожух Сняли планетарный редуктор Вытащили мотор
ШАГ 4 - Отпаиваем контакты
Все что делаем паяльником, делаем очень аккуратно, и желательно быстро - изоляция кабелей плавится под температурой паяльника, даже если отпаивать/припаивать только за металлические жилы.
Поэтому - пинцетом придерживаем кабель за изоляцию, а не за металл.
Важно: перед отпаиванием запомните в каком положении была фишка, которой подключается мотор в смарт-хаб.

Отпаяли
Кабели довольно интересно перекручены, поэтому рекомендую сфотографировать перед тем, как вынимать их из крепления.
Я без сто грамм с первого раза не разобрался, и закрутил их неправильно.

Запоминаем как были закручены кабели
ШАГ 5 - режем и вставляем
Отрезаем кабель на месте предполагаемого перелома. Обычно он прямо на входе в корпус мотора.
Затем делаем надрез по середине целого куска кабеля.
Чтобы узнать, сколько резать, достаточно приложить отрезанный участок, и сделать такой же надрез.

Делаем надрез по длине отрезанного куска
Теперь вставляем их в крепление. Вставлять нужно до конца места разреза.
Зачищаем концы кабелей, отгибаем металл друг от друга, чтобы получились "Куриные лапки"

Куриные лапки
Залужаем и наносим немного припоя.
Если кабели имеют трапецевидную форму, то лучше обрезать их до конусовидной формы, чтобы не было КЗ на плате.

Залудили куриные лапки
Припаиваем кабели обратно к плате (убедитесь, что фишка стоит в то же самом положении, в котором стояла до этого - если смотреть на мотор сверху, то пазы будут внизу)

Как можно заметить, пайка у меня не очень профессиональная - но мотор работает хорошо.
Флюс не наносил.
После припаивания каждой тройки проходитесь по всем припаянным контактам тестером на предмет наличия КЗ.
Надеюсь, данное руководство было понятным, и поможет начинающим робототехникам чинить сломанные моторы.
Статья описывает один из возможных способов кустарного ремонта графитового шлейфа LCD управляющего блока LEGO Mindstorms NXT. Адресована тем, кому уже не помогает подкладывание под шлейф свернутых бумажек, резинок или магическое действо с прогреванием конденсаторов на плате кнопок управления (какая то сложная магия, я так и не смог понять в чем заключается её сакральный смысл).
Также статья может быть полезна тем, у кого перестал работать экран любимого калькулятора, брелка автомобильной сигнализации, швейной машинки и других устройств, ремонт которых в специализированных мастерских по каким-то причинам невозможен или нецелесообразен. Написана непрофессионалом для непрофессионалов, для ремонта будут использованы общедоступные материалы и инструменты. Осторожно, в тексте статьи много больших фотографий посредственного качества.
- макетный нож;
- ножницы;
- пинцет;
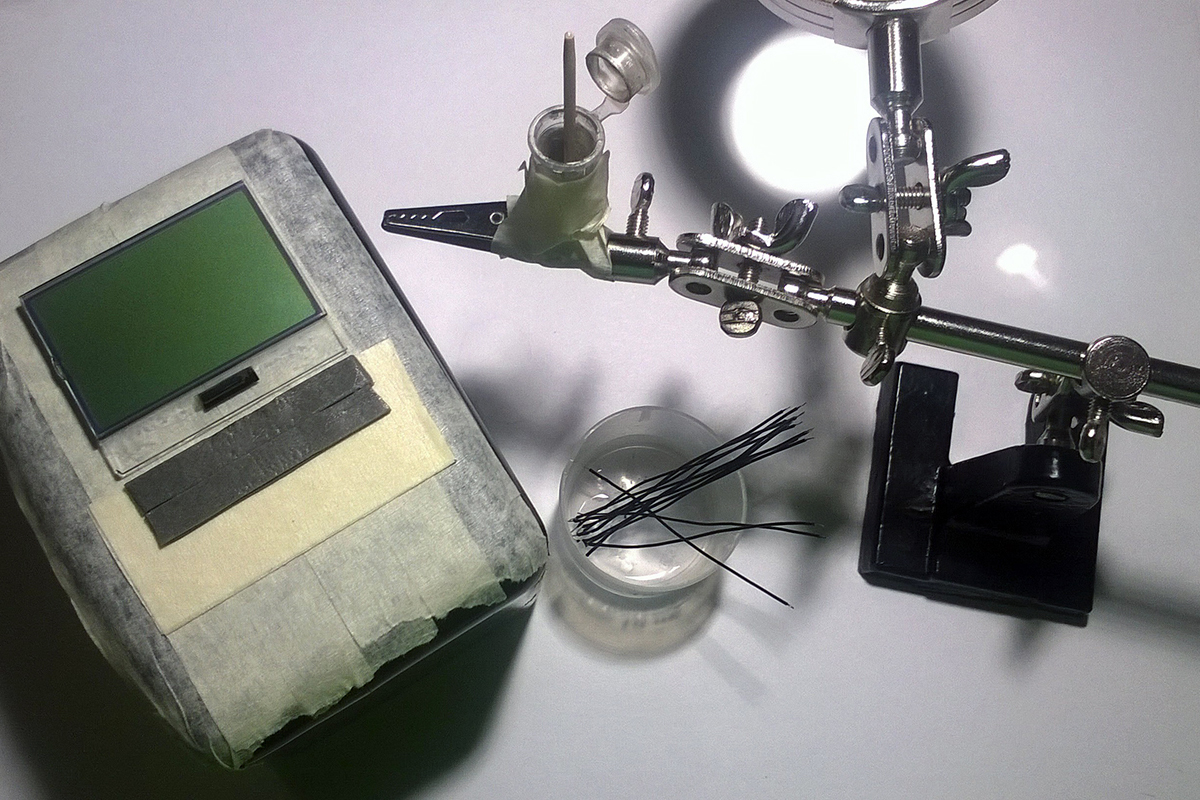
- штатив «третья рука» с линзой;
- маленький паяльник или паяльная станция;
- безотмывочный флюс;
- токопроводящий клей;
- эпоксидный клей;
- двусторонний скотч;
- малярный скотч;
- тонкий монтажный провод;
- деревянные зубочистки;
- ватные палочки;
- этиловый спирт.
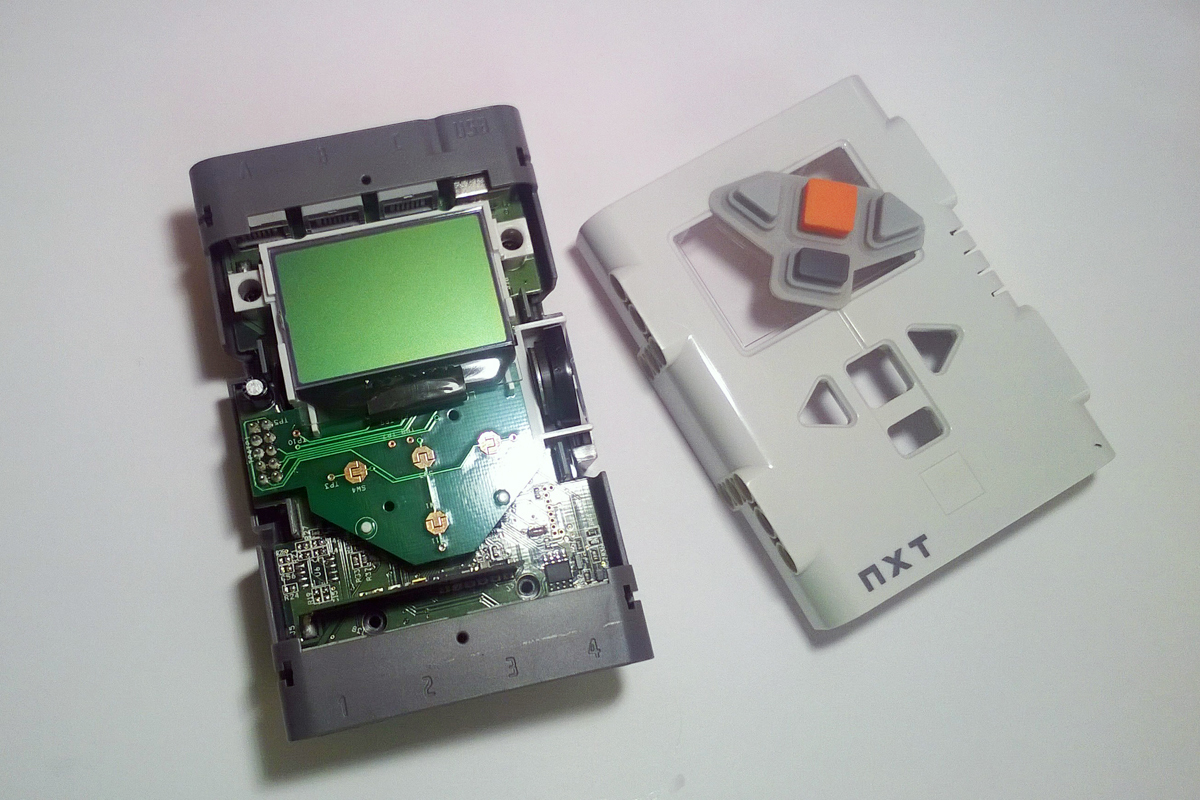
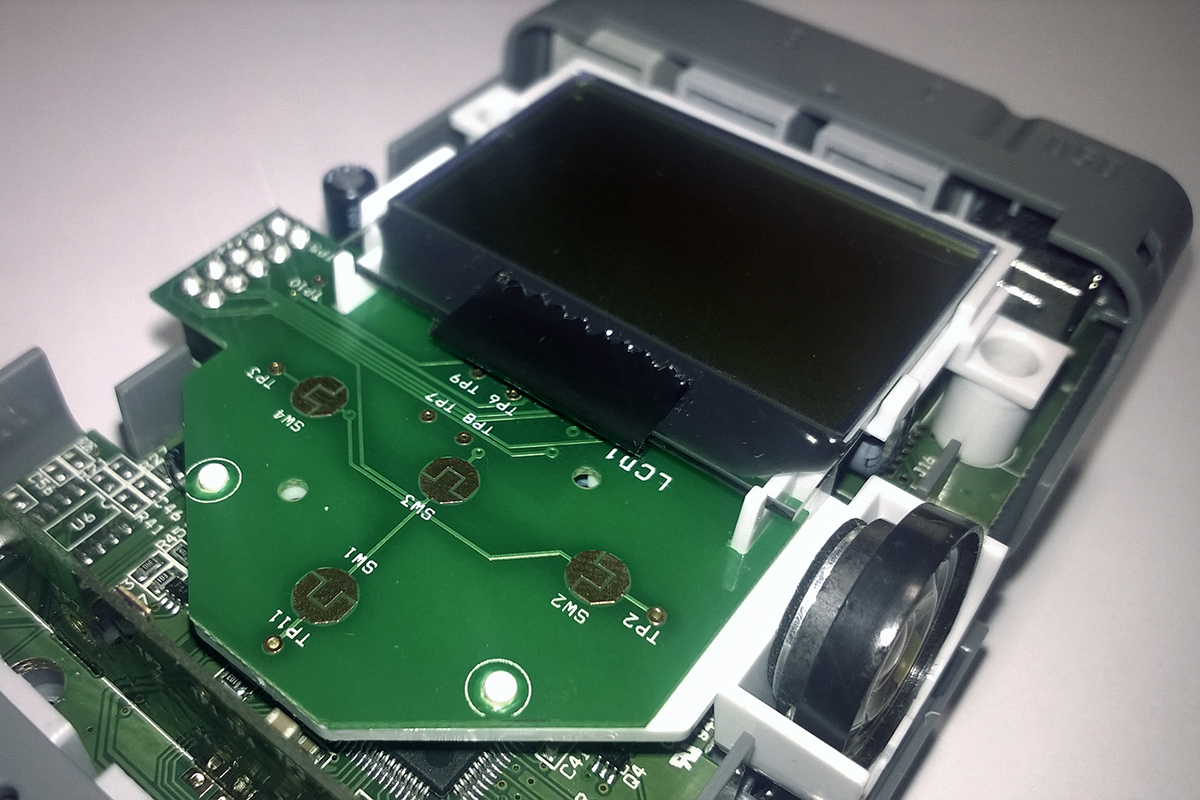
Врожденной проблемой управляющего блока конструкторов LEGO Mindstorms NXT первых выпусков был графитовый шлейф. Похожие шлейфы, судя по количеству посвященных их замене или восстановлению статей, помогли скоротать с паяльником в руках не один вечер владельцам некоторых моделей автомобилей, швейных машинок, калькуляторов, синтезаторов и другой техники. Выход из строя такого шлейфа в управляющем блоке LEGO NXT — вопрос скорее времени, чем интенсивности использования. По крайней мере, мне однажды пришлось столкнуться с такой проблемой у конструктора, который просто пролежал запакованный несколько лет после приобретения.
Внешне все выглядит примерно так: после включения блока вы слышите стартовую мелодию, нажатия на кнопки управления тоже сопровождаются звуками, при подключении к компьютеру блок нормально определяется системой, через программное обеспечение LEGO NXT вы можете залить в блок свои программы или обновить прошивку. Но при этом не работает встроенный LCD.
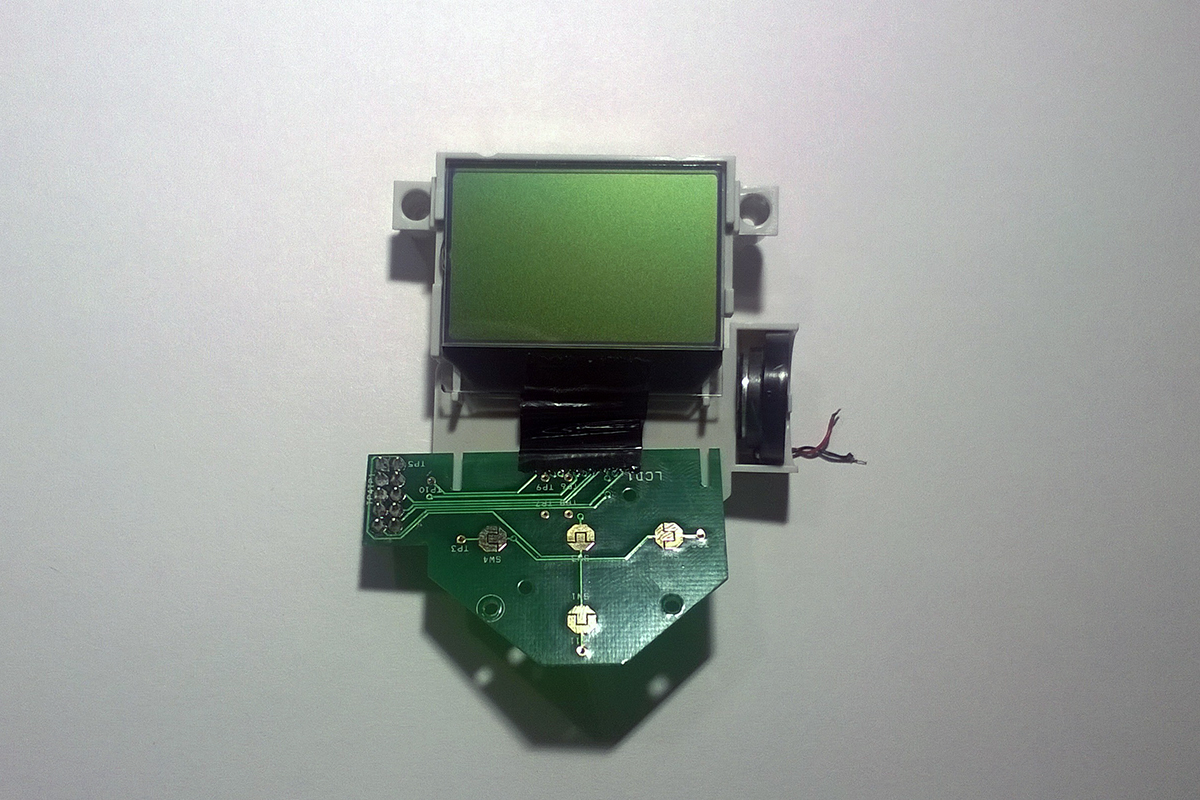
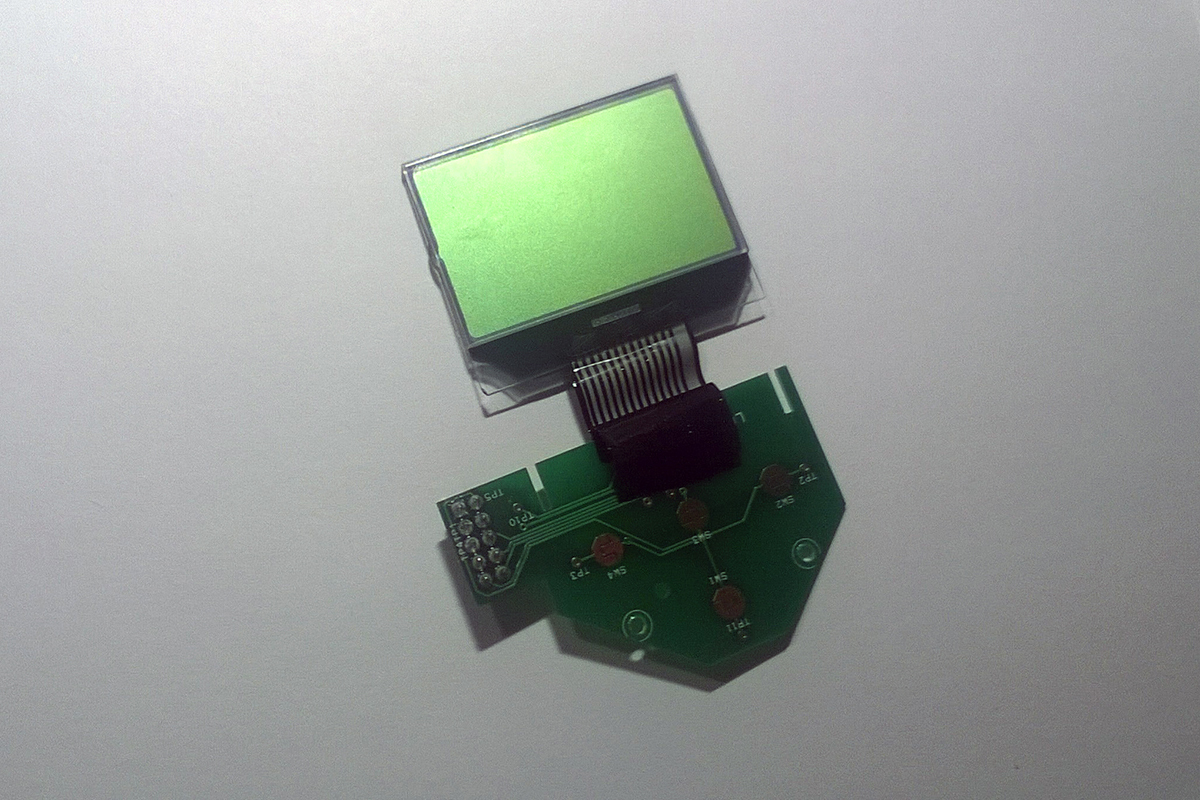
Нужно отдать должное LEGO, через пару лет они переработали плату управляющего блока, заменив графитовый шлейф на медный, заодно перенеся контактные площадки кнопок управления на основную плату. Это позволило отказаться от дополнительной платы под кнопки и упростило конструкцию, добавив ей надежности. Внешне блоки практически не отличимы. Быстро выяснить кто перед нами можно, выкрутив четыре самореза в батарейном отсеке и сняв с блока крышку. На первой и второй фотографии блок с графитовым шлейфом, на третьей — его более «счастливый» собрат с медным.
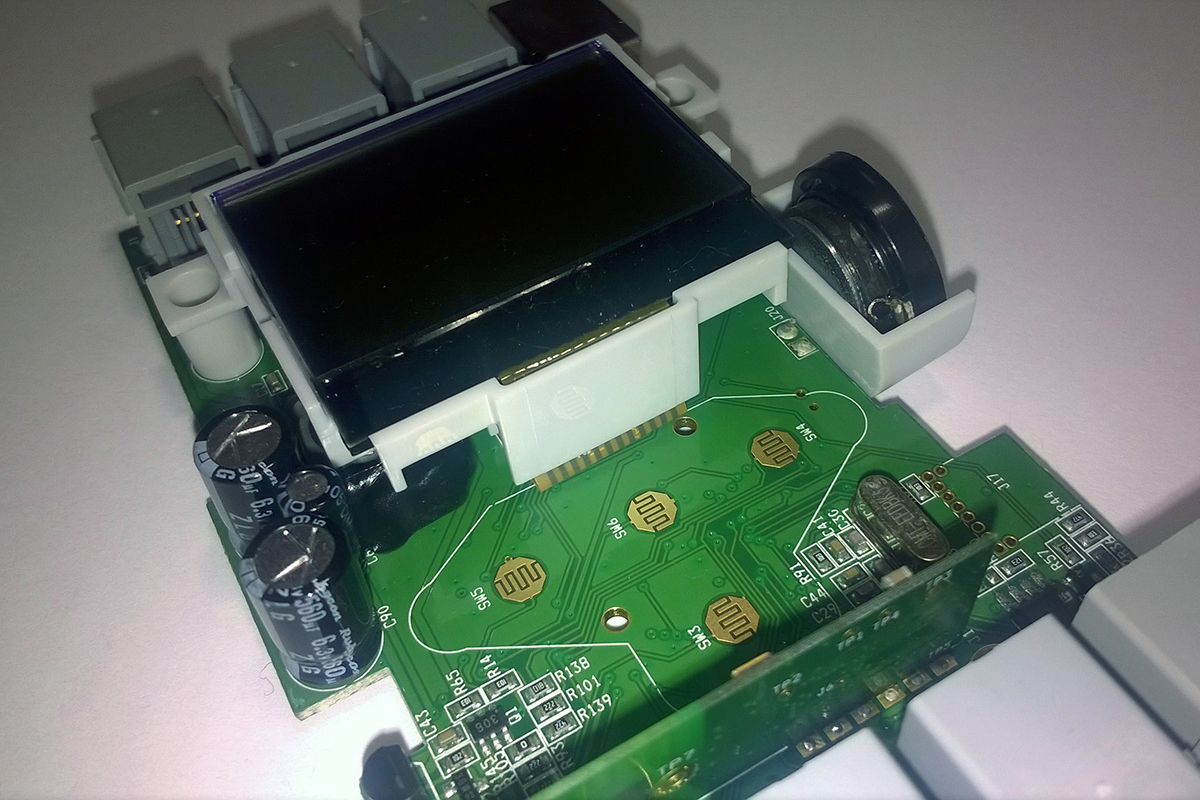
Если ваш блок с таким же шлейфом как на первый двух фотографиях, можете для начала попробовать прогладить его в местах контакта разогретым паяльником через сложенный вдвое-втрое листок бумаги. Действуйте осторожно, экранчик стеклянный — может и лопнуть. Такое прогревание может помочь, иногда достаточно надолго. Если не помогает — придётся ремонтировать шлейф. Для ремонта нужно снять LCD вместе с платой управляющих кнопок, динамиком и пласмассовым основанием. Выкручиваем еще два самореза, а проводки к динамику от платы можно отпаять или просто откусить. Они все равно короткие, для удобства их лучше заменить на более длинные.
Постановка задачи
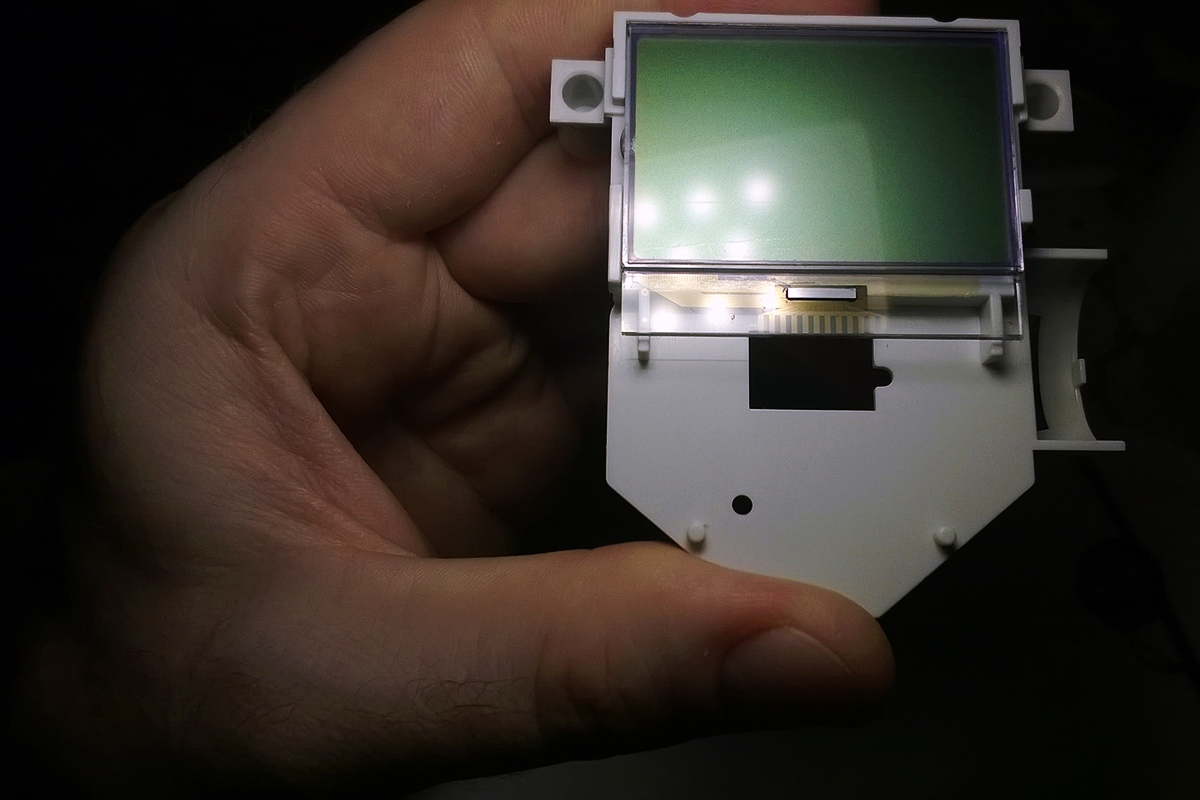
Наша цель — создать токопроводящее соединение между контактными площадками на стекле LCD и проводками, которыми мы заменим вышедший из строя шлейф. Контактные площадки на стекле можно увидеть, расположив LCD под определенным углом к источнику света. Просто положите его на ладонь и попробуйте слегка покачать в разные стороны под светом настольной лампы.
Подготовка плацдарма
Итак, виновник торжества лежит перед нами на столе. Подковыриваем плату кнопок управления и снимаем ее с пластмассового основания. LCD приклеен к основанию двумя полосками двухстороннего скотча. Помня, что экранчик стеклянный, не прикладываем чрезмерных усилий. Капаем внутреннюю сторону LCD пять-шесть капель спирта, даем ему затечь в щель между основанием и LCD и растечься по скотчу и, слегка оттягивая LCD от основания, осторожно его отклеиваем. Скотч на основании менять не стоит, после испарения спирта он не потеряет клеящих свойств.
Подобным же образом отклеиваем динамик от основания, чтобы не пожечь его при замене проводов. Динамик приклеен к основанию через прокладку, при отклеивании стараемся чтобы прокладка осталась на динамике, а скотч на основании. Помогаем им заточенной в виде лопатки зубочисткой.
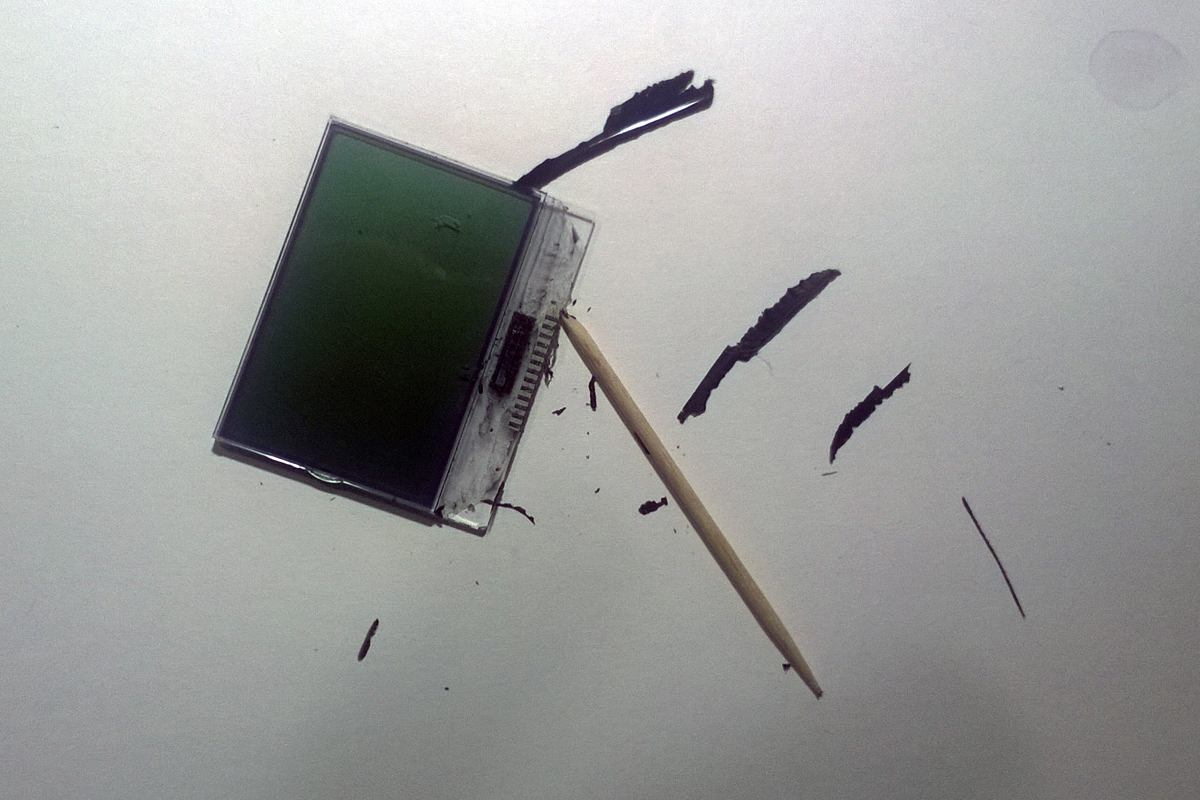
Такой же зубочисткой поддеваем защитный скотч черного цвета, и сдираем его со обоих сторон шлейфа. Следом за скотчем поддеваем и отрываем шлейф. Поскольку мы решили заменить шлейф тонкими монтажными проводами, можно с ним особо не церемониться. Если вам все же хочется сохранить его для истории, можете попробовать снимать с него защитный скотч постепенно отмачивая его спиртом.
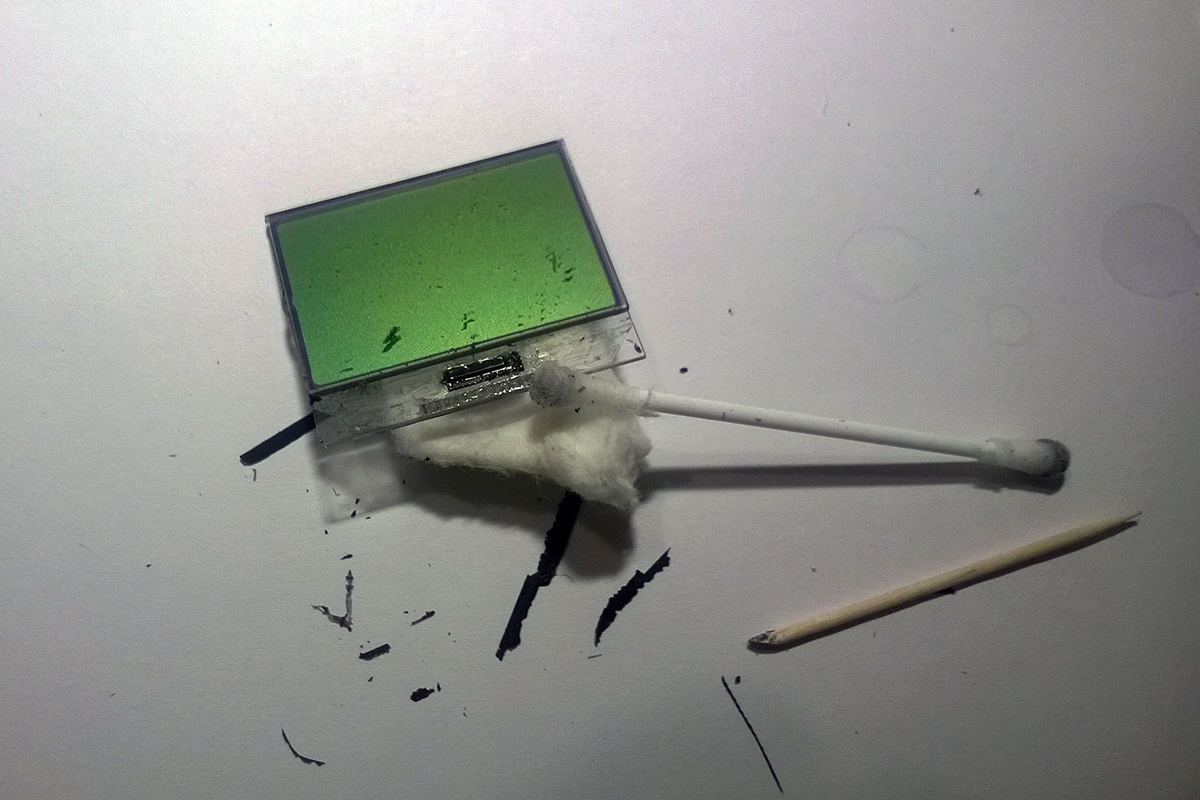
После удаления старого шлейфа с помощью заточенных лопаточкой зубочисток, ватных палочек и спирта очищаем контактные площадки на LCD и плате. Очистка стекла потребует некоторого времени и усилий. Остатки силиконового компаунда вокруг контактных площадок удаляются довольно тяжело, а очистить их нужно хорошо. Внимание, не используйте для очистки металлические предметы и жидкости более агрессивные чем спирт. Контактные площадки на стекле очень тонкие, а поверхность экрана покрыта слоем пластика.
По завершении очистки можно закрепить LCD двусторонним скотчем на каком-нибудь основании для удобства дальнейшей работы.



Кульминационный момент
Памятуя о том, как на хабре относятся к рекламным статьям, вынужден все же отметить, что у меня получилось более-менее сносно приклеить проводки только конкретным клеем конкретного производителя. Что за клей можно посмотреть на первой фотографии этого раздела. В конце статьи я постараюсь объяснить что сподвигло меня на ее написание и обосновать выбор клея.
Итак, наш подопытный закреплен двухсторонним скотчем на подходящем основании, примерно в двух миллиметрах от него наклеены полоски двухстороннего скотча для временного закрепления проводков. Сами проводки аккуратно зачищены и облужены с двух сторон, после чего помещены в подходящую ёмкость со спиртом.
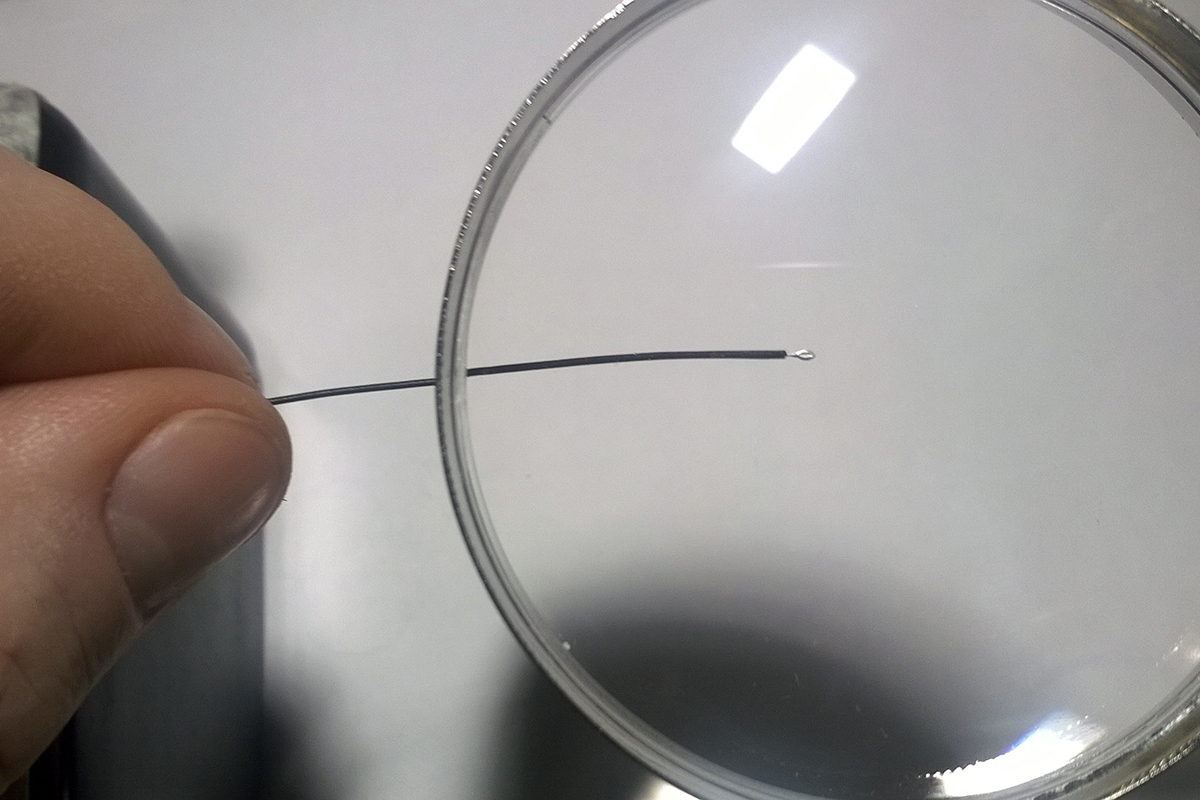
Основная идея состоит в том, чтобы набрать одну-две капли тщательно перемешанного токопроводящего клея на зубочистку и, держа ее вертикально над пузырьком с клеем, подставить под стекающий с зубочистки клей облуженный и обрезанный до нужной длины кончик отрезка тонкого монтажного провода. Аккуратно проворачивая провод, необходимо добиться образования на нем капельки клея. Схожей с той, на которую можно посмотреть на третьей фотографии этого раздела. Действовать необходимо быстро, потому что клей достаточно быстро густеет. Поэтому как можно быстрее после нанесения клея проводок нужно приляпать к контактной площадке на стекле. Примерно так, как показано на четвертой фотографии раздела.
Если делать все достаточно быстро, клей на кончике провода не успевает сильно загустеть и хорошо смачивает контактную площадку. Для правильного распределения клея полезно сделать одно-два движения кончиком проводка вдоль контактной площадки. После удачной стыковки проводка и контактной площадки для полного успеха проводок фиксируется на наклеенном рядом с LCD двухстороннем скотче. А если не получилось, не беда — проводок возвращается испачканным клеем концом в ёмкость со спиртом, остатки клея со стекла счищаются зубочисткой, после чего операция повторяется необходимое количество раз.
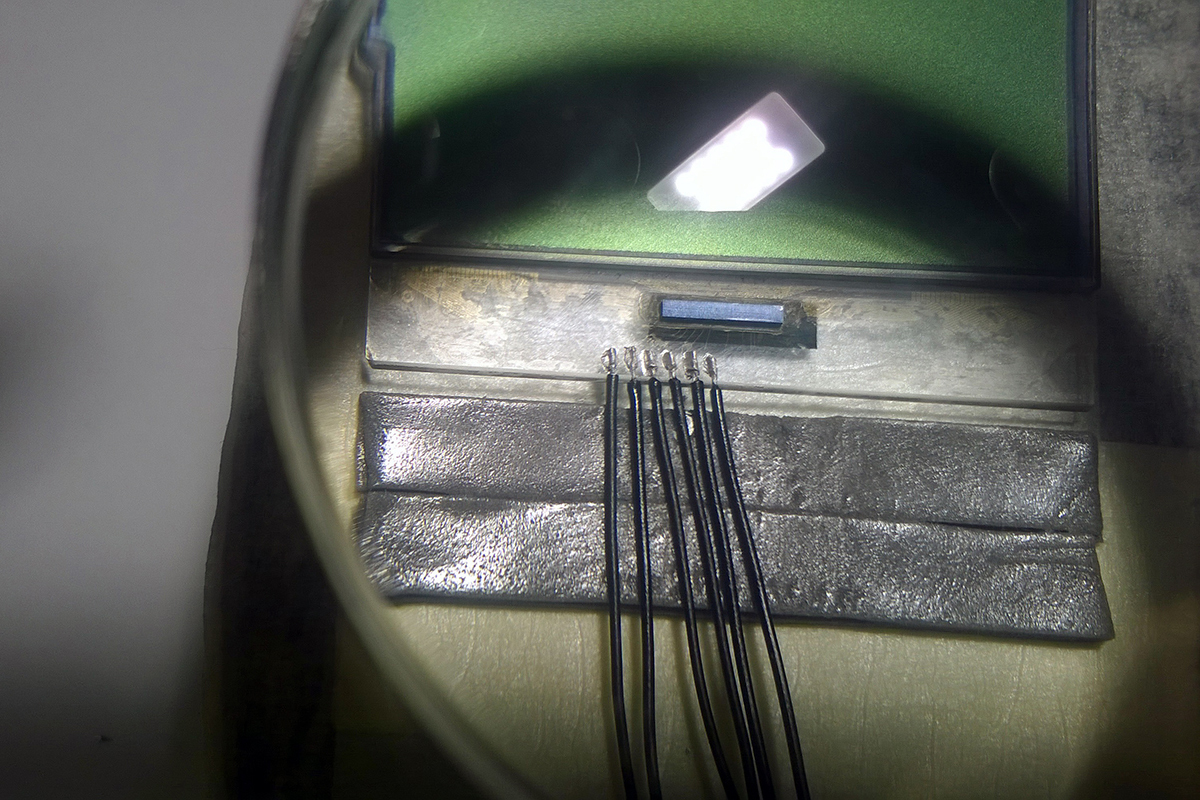
После того, как последний проводок победоносно приляпан на свою контактную площадку и закреплен на скотче, выжидаем полчаса для схватывания клея. Теперь можно аккуратно установить дополнительный фиксатор для проводов, я использовал в этом качестве кусочек пластмассы выломанный при распаковке шприца с эпоксидной смолой.
Ну что же, наступает момент истины. Облуживаем контактные площадки на плате кнопок управления и, действуя максимально аккуратно, припаиваем к ним свободные концы проводков. Подключаем все к основной плате, предварительно вставив в батарейный отсек пять элементов питания. Вставляем шестой элемент питания, наблюдая за LCD. Стараемся на радостях не оборвать провода, если все работает. Помним что прочность соединения у токопроводящего клея почти никакая.
Закрепляем успех нанесением на приклеенные проводки слоя эпоксидной смолы. Во время этой процедуры стараемся не касаться ни проводов, ни стекла. Можно дождаться, пока с зубочистки стечет небольшая капля набранной на нее эпоксидки, коснуться этой каплей первого провода начать её растягивать, пытаясь дотянуть до двенадцатого. Если не хватило эпоксидки — набираем новую порцию и продолжаем с места разрыва. Ждем полного схватывания эпоксидной смолы.
Все, самое сложное позади. При необходимости выравниваем проводки, добавляем еще слой эпоксидки на лицевую сторону, дожидаемся ее схватывания, открепляем и переворачиваем LCD, проклеиваем эпоксидкой обратную сторону.





Завершающая стадия
Тщательно все отмерив, выравниваем и обрезаем до необходимой длины приклеенные к LCD проводки. Аккуратно зачищаем и залуживаем концы проводков и, сложив LCD и плату кнопок управления лицевыми сторонами, припаиваем проводки к предварительно залуженным контактным площадкам платы. При пайке пользуемся безотмывочным флюсом.
Смыв лишний флюс спиртом, устанавливаем воссоединённые плату и LCD на основание. Удобнее сначала установить плату, а потом, аккуратно сгибая провода приклеить к основанию LCD. Не забыв заменить проводки, возвращаем на место динамик и кнопки.
Припаяв на свои места провода от динамика, устанавливаем отремонтированный узел на основную плату. Закручиваем два самореза, заполняем батарейный отсек элементами питания. Услышав стартовую мелодию, убеждаемся в работоспособности LCD.
Рано или поздно вам обязательно понадобится разобрать одно из творений Лего.
Первый шаг - отсоедините большие секции. Затем разделите их на меньшие части и, наконец, отделите одну деталь от другой.

В какой-то момент вы можете столкнуться с тем, что детали сцепились друг с другом настолько крепко, что вам не удается разделить и даже просунуть между ними ноготь. Часто это происходит с маленькими пластинами (лишнее доказательство того, как хорошо работает сочетание шипа и трубки).
Однако, несмотря на всю их привязанность друг к другу, вы понимаете, что им придется расстаться.
В некоторых готовых наборах LEGO и упаковках наборов кубиков разного размера можно найти довольно странно выглядящие куски пластмассы (рис. 2.30). Это не кубик, хотя на нем есть даже несколько шипов. Это — разделитель кубиков Лего.
Если в ваших наборах не оказалось разделителя, рекомендуем купить два таких инструмента (они часто используются вместе). Разделители стоят около трех долларов за штуку и сэкономят вам гораздо больше денег, позволив избежать расходов на стоматологов: они непременно понадобятся после того, как вы попытаетесь разъединить кубики и пластины зубами.

Разделители есть в продаже и в России (есть в Майшоп) - называются Конструктор Lego "Отделитель элементов".
Выдержки из книги: The Unofficial LEGO Builder’s Guide. Аллан Бедфорд: Большая книга LEGO.

Как пользоваться разделителем кубиков.
Допустим, у вас есть две пластины 2x2, плотно пригнанные друг к другу. Возьмите в одну руку разделитель кубиков, затем поместите пластины на шипы в верхней части разделителя. Сверху наложите второй разделитель, при этом получится что-то вроде плоскогубцев (рис. 2.31). Осторожно сжимайте разделители, и вы обнаружите, что пластины начали разъединяться.

Или, скажем, необходимо отделить небольшую деталь от крупной, например пластину 1x2, установленную в середине пластины 4x6 (рис. 2.32). Для этого можно использовать один разделитель. На рис. 2.33 показано его магическое действие.
На рис. 2.34 изображен прием для разъединения деталей, если у вас нет разделителя.

Можно использовать кубик и для разъединения таких деталей, как на рис. 2.32. Поставьте кубик на пластину 1x2 (рис. 2.35) и осторожно нажмите, чтобы наклонить кубик относительно большой пластины.
Если вы сможете сделать это, не приподнимая кубика, то обнаружите, что пластина 1x2 немного отошла от шипов пластины 4x6.
Читайте также: