
Как разобрать сервопривод лего
Обновлено: 17.05.2024

Есть проблема.
У серво мотора подорвался кабель и сигнал проходит с перебоями. Вопрос: Как разобрать мотор не повредив сильно корпус и оставив его в робочем состоянии?


Есть ещё одна проблема.
У меня есть серва которая поворачиваясь против часовой стрелки отцентризовывается, а при повороте по часовой стрелки заедает и не возвращается назад. При разборе контакты почистил - не помогло. Помогите если знаете как починить такой дефект.

Саша, скорее всего такой же обрыв одного из проводов на выходе из корпуса Серво, или на выходе из корпуса ПФ-разъема, либо плохой контакт разъемов

У меня такая же проблема возникала, иголочкой прям между положениями контактов пройдись. мне помогло)


Sanya, проблема с сервой. Избавляйтесь от этого барахла и покупайте гиксерву, отменно работает , стоит в 5 раз дешевле
Nikolay, когда я пользовался только пф, на себе прочувствовал проблемы сервы: обе сломались, по разным причинам. Конечно, у некоторый они работают годами, но всё-таки из-за такого рандома я решил перейти на гик серву, пока что кроме не пуризма не слышал ни у кого ни о каких проблемах связанных с ней
Лёня, я не спорю, что Гик работает намного плавнее и чётче, но не у всех есть RC-аппаратура и всякие RC-Brick, Wixy и прочие Лешие - это всё не продаётся в магазине
Ситуация, при которой детки переламывают кабель моторов Lego WeDo 2.0, достаточно распространена. С переломанным кабелем моторы либо "глючат" (и надо найти правильное положение, в котором они работают) , либо вообще перестают вращаться.
Что делать? Покупать новый мотор? В наших реалиях - это дорого. Даже китайский аналог стоит порядка 15 единиц валюты.
Самое очевидное решение - попробовать отремонтировать.
Так случилось, что у меня как раз надломился кабель рядом с основанием мотора. В этом случае - ремонт достаточно прост - достаточно перепаять кабели.
ШАГ 1 - откручиваем винт
Фото мотора снизу Открутили винт
ШАГ 2 - снимаем кожух
Надо сказать, что по сравнению с WeDo 1.0 кожух на удивление легко снимается. На этот раз не нужно "подковыривать" защёлки - достаточно аккуратно подцепить очень тонкой отвёрткой в нескольких местах, постепенно ведя к защёлкам

Вставляем отвёртку и поддеваем крышку
Поддеваем кожух с одной стороны и немного отодвигаем:

Отодвигаем, но не снимаем полностью
Полностью не снимаем с одной стороны, чтобы не сломать защёлку с другой стороны - просто чуть поддеваем.
Переворачиваем

Точно также с другой стороны - начинаем с края и ведём к защёлке
Также поддеваем с другой стороны, направляясь к защёлке.
Теперь можно снимать до конца - он действительно хорошо снимается.

Поддеваем с другой стороны
ШАГ 3 - снимаем планетарный редуктор и вынимаем мотор
Всё легко отсоединяется. Мотор вынимал руками. Можно пассатижами за шпиндель мотора, если не получается руками
Сняли кожух Сняли планетарный редуктор Вытащили мотор
ШАГ 4 - Отпаиваем контакты
Все что делаем паяльником, делаем очень аккуратно, и желательно быстро - изоляция кабелей плавится под температурой паяльника, даже если отпаивать/припаивать только за металлические жилы.
Поэтому - пинцетом придерживаем кабель за изоляцию, а не за металл.
Важно: перед отпаиванием запомните в каком положении была фишка, которой подключается мотор в смарт-хаб.

Отпаяли
Кабели довольно интересно перекручены, поэтому рекомендую сфотографировать перед тем, как вынимать их из крепления.
Я без сто грамм с первого раза не разобрался, и закрутил их неправильно.

Запоминаем как были закручены кабели
ШАГ 5 - режем и вставляем
Отрезаем кабель на месте предполагаемого перелома. Обычно он прямо на входе в корпус мотора.
Затем делаем надрез по середине целого куска кабеля.
Чтобы узнать, сколько резать, достаточно приложить отрезанный участок, и сделать такой же надрез.

Делаем надрез по длине отрезанного куска
Теперь вставляем их в крепление. Вставлять нужно до конца места разреза.
Зачищаем концы кабелей, отгибаем металл друг от друга, чтобы получились "Куриные лапки"

Куриные лапки
Залужаем и наносим немного припоя.
Если кабели имеют трапецевидную форму, то лучше обрезать их до конусовидной формы, чтобы не было КЗ на плате.

Залудили куриные лапки
Припаиваем кабели обратно к плате (убедитесь, что фишка стоит в то же самом положении, в котором стояла до этого - если смотреть на мотор сверху, то пазы будут внизу)

Как можно заметить, пайка у меня не очень профессиональная - но мотор работает хорошо.
Флюс не наносил.
После припаивания каждой тройки проходитесь по всем припаянным контактам тестером на предмет наличия КЗ.
Надеюсь, данное руководство было понятным, и поможет начинающим робототехникам чинить сломанные моторы.

Всем хабраконструкторам, привет!
Пришла мне как-то в голову дурацкая мысль: собрать девайс, который бы молотком забивал гвозди. Просто ради демонстрации работы сервопривода. Алгоритм простой: даём команду на поднятие молотка, ждём пока он поднимется, отпускаем молоток; и так пока гвоздь не будет забит. Но как узнать, что молоток поднялся и что гвоздь забит, не пользуясь дополнительными датчиками? Спросить у «глупого» сервопривода! Как именно это сделать — об этом и пойдёт речь в статье.
Что такое сервопривод? Наверное, все знают, но на всякий случай: это привод, который в отличие от мотора постоянного тока не просто крутится пока подаётся напряжение, а стремится повернуться к заданному углу и удержаться в этом положении. Угол устанавливается с помощью ШИМ (PWM)-сигнала. Сервопривод стремится к определённому положению, а следовательно должен знать своё собственное. Перед началом сборки я был уверен, что запросить текущий угол будет проще простого и это возможно «из коробки». Не тут то было. Но обо всём по порядку.
- Установить сервоприводу определённый угол для поднятия молотка
- Бездействовать пока сервопривод не сообщит, что угол достигнут
- Отключить питание сервопривода, чтобы молоток упал на гвоздь
- Прочитать угол в упавшем положении
- Если угол после падения несколько раз подряд не изменился — значит гвоздь перестал вколачиваться. Предположительно он забит — прекращаем исполнение
- Если угол изменился, начинаем сначала
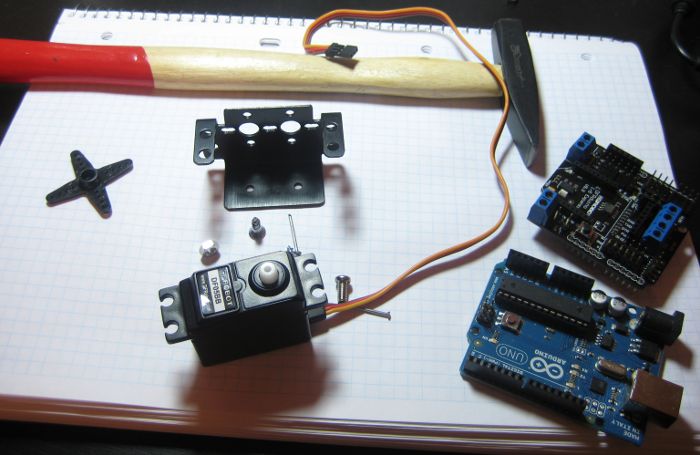
Пилим и скручиваем:

Приступаем к написанию прошивки для Arduino… Довольно быстро становится понятно, что установить определённый угол для сервы — не проблема. В частности, это позволяет сделать стандартная библиотека Servo, которая из заданного в градусах угла формирует соответствующий PWM-сигнал. А вот с чтением — проблема: функции для этого нет.
Матчасть
После недолгих поисков в сети можно понять как устроена серва. Это обычный мотор постоянного тока, который соединён с выведенным шпинделем через несколько шестерней, формирующих пониженную передачу. Этот же шпиндель с внутренней стороны физически прикреплён к потенциометру (подстроечному резистору). При вращении мотора шпиндель поворачивается, поворачивается и бегунок потенциометра, выходное напряжение потенциометра меняется, мозги сервы его считывают и если напряжение достигло заданного уровня — цель достигнута, мотор отключается от питания.
То есть, у нас есть потенциометр, по сигналу с которого можно определить текущий угол. Осталось только разобрать сервопривод и подключиться в нужном месте. Разбираем:

Сразу скажу, что сервопривод с фотографии я безвозвратно сломал в процессе разборки. Не нужно было вообще выламывать плату с электроникой, достаточно просто снять заднюю крышку, которая держится на 4-х винтах. Но сразу это было не очевидно, и чтобы понять куда на плате припаян потенциометр, пришлось пожертвовать одним приводом.
Вот как припаян потенциометр на сервоприводах от DFRobot:
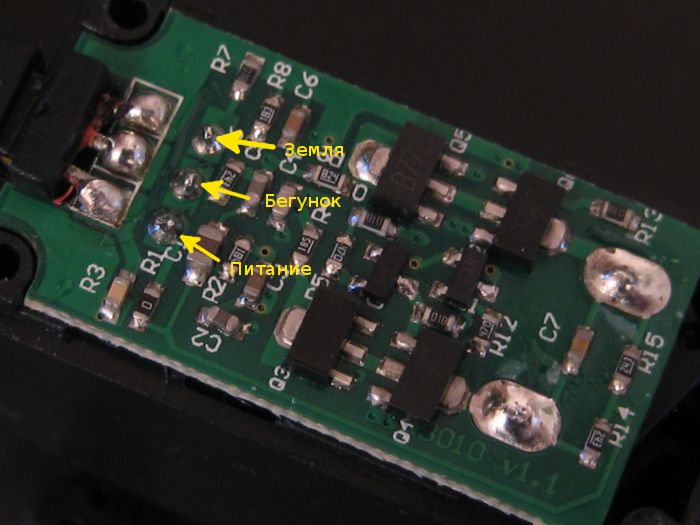
Нам нужен сигнал с бегунка, который меняется в зависимости от угла поворота от минимального до максимального напряжения. Берём мультиметр, вращаем шпиндель и смотрим: каким углам какой сигнал соответствует. Для моей сервы углу в 0° соответствует напряжение 0.43 В, а максимальному углу поворота в 180° соответствует напряжение 2.56 В.
Аккуратно припаиваем новый сигнальный провод.

Подключаем его к аналоговому входу A5 на Arduino. Закрываем крышку. Пишем программу:
Включаем, пробуем, работает!
Что делать с полученным опытом — вариантов много: можно сделать контроллер вроде того, что используется на кораблях для установки тяги (полный вперёд / полный назад); можно использовать серву с обратной связью как элемент автономного рулевого управления какой-нибудь машины; можно много всего. Да прибудет со всеми нами фантазия!

История такова: покупаю новый краник (до этого его не было вообще) и ставлю. Возникает мысль: "а почему бы и тросик по-человечески не зацепить?". Разобрал бардачек и одел. Прошло пару дней и температура перестала регулироваться. Характерное жужжание за панелью пропало. Может тросик подклинило? Отцепил и ничего не изменилось. Надо снимать торпеду и смотреть. Зная, что для замены сервопривода надо снимать торпеду и половину салона, я заранее спрашиваю хорошего знакомого ArtemJZX90 не остался ли у него этот самый привод. Повезло, в кратчайшие сроки Артем отправляет мне его безвозмездно.

По приходу посылки скидываю торпеду, тащу ее домой.

Промываю все воздуховоды. Подтягиваю все саморезы. Ремонтирую выходную решетку возле лобового. Заменяю поролон на стыках. Проклеиваю скрипящие участки термоклеем. Меняю привод, собираю (а иначе не проверишь) и…одно срабатывание, потом тишина. Тросик не подцеплен. Артем уверен, что с приводом было все ок. Я, тоже не сомневаясь, начинаю "грешить" на мозг или блок управления. Выбираю день и второй раз скидываю торпеду, осматриваю провода, блок управления климатом и сам мозг климата, проверяю не заклинило ли заслонки — все впорядке. Собираю машину с мыслями заказать еще один серв…
Открываю драйв и на первой странице вижу объявление о продаже барахлишка, среди которого оказался нужный мне контрактный сервопривод. Договариваюсь с владельцем Santimand89 и в кратчайшие сроки посылка отправлена. Пока она в пути, я в третий раз разбираю салон, снимаю сервопривод и пытаюсь сделать из двух один. Вроде получилось и моторчик должен крутить бодро, вот только я не поставил метки того, как должен стоять рычаг. Выставляю наугад. Собираю, мотор попытался сдвинуться, но с положением я не угадал и он дохнет. Собираю и жду посылку…
И вот наконец-то сегодня все заработало. Торпеда была снята в четвертый раз! Теперь скинуть ее не проблема. Последняя замена заняла ровно 2.5 часа с полным разбором и полным сбором.
Снять торпеду можно не опуская на сиденье руль, но нужен помощник. Попутно нужно разобрать воздуховоды и промыть их с мылом и губкой. Поверьте, просто водой грязь не смоется, ее нужно хорошенько тереть. Как ни странно блок климата не такой грязный, как система воздуховодов. Вывод простой: мне не повезло с двумя приводами, из-за этого начал искать причину в других местах.
А теперь технические подробности и фотки внутренностей. А вдруг кому пригодится?
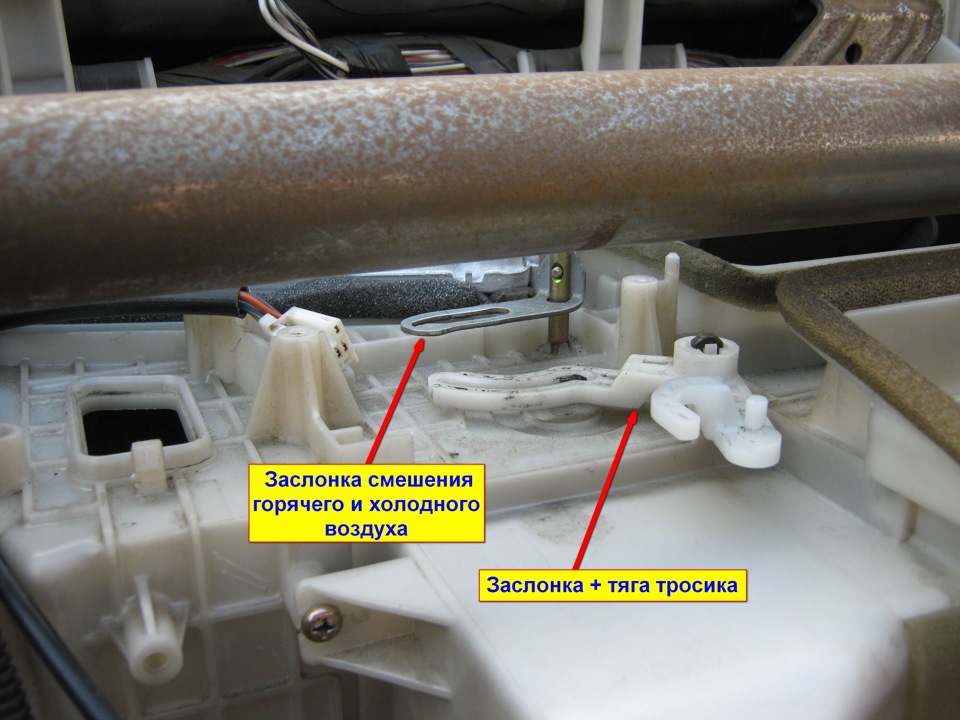
Рычаги заслонок:
Видео работы умирающего сервопривода:
Как видно, он едва шевелится, причем нагрузки на него практически нет.
Виды сервоприводов:
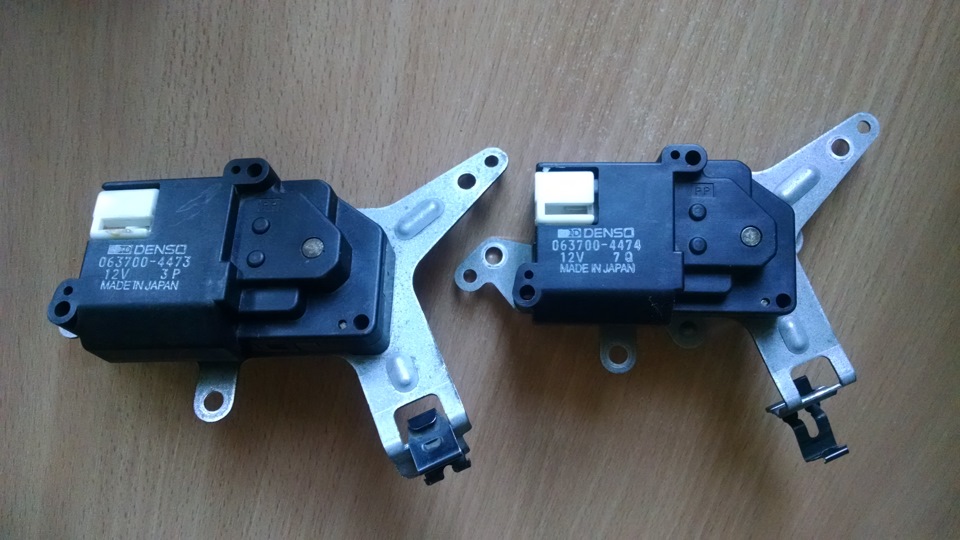
Из трех оказавшихся у меня два отличались последними цифрами номера. Так же найдено отличие в задней крышке эл. мотора — добавлен керамический конденсатор последовательным соединением с одним контактом.
Внутрянка сервопривода:

Разбирается довольно легко, нужно открутить кронштейн крепления и один саморез. Далее отогнуть защелки и все готово. Вот только не забудте отметить положение повортного рычага!



Как я думаю, площадка не для определения положения вала, а для подачи на разные площадки напряжения, чтобы сервопривод отработал только по их длине.


Как видим, помимо забитой стружки в зазорах, кольца еще и отходят. Я отсоединял обмотки, при этом кольца меджу собой звонились, т.е. был пробой по стружке между ними. Спопротивление каждой обмотки 27-29 Ом. У меня получилось переклеить контакты суперклеем, держалось отлично, мотор работал. Но, как я уже писал, из-за неправильно выставленного вала мотор снова подох.

Со щетками отдельная история, каждая щетка сделана на концах отдельными лепестками, один был почему-то загнутым (разбирал аккуратно).
С появлением в 2007 году электрической системы LEGO Power Functions открылись новые интересные возможности для конструкторов, в частности моделей LEGO Technic:
- Моторизация
- Освещение
- Дистанционное управление
Наиболее важным и сложным на мой взгляд всегда является вопрос моторизации.

Ввиду множества существующих моторов, всегда возникает вопрос: какой мотор выбрать для той или иной функции модели? Но недостаточно правильно выбрать мотор - не менее важно правильно его применить, а именно:
- определить необходимую скорость и крутящий момент вала в конечном месте приложения усилия (вращение колес/рулевая система/поворот башни или подъем стрелы крана и т.д.)
- правильно выбрать место расположения моторов в модели
- надежно закрепить моторы
- грамотно построить трансмиссию
Под трансмиссией понимается совокупность закрепленных шестерней осей и прочих элементов для передачи крутящего момента от мотора к конечной точке моторизации. Более подробно я расскажу об этом отдельно. Отмечу лишь, что при неправильном планировании трансмиссии у модели будет низкий КПД и будут подвержены избыточной нагрузке отдельные элементы, что в конечном счете может привести к усиленному износу и даже поломке деталей трансмиссии.
На сегодняшний день линейка LEGO PF моторов представлена 4-мя моторами: L, M, XL, Servo. Дополнительно я включил в обзор скоростной 9V Race Buggy мотор, который не имеет аналогов в системе PF 2007 года. К сожалению, он уже не производится и не применяется в современных наборах, однако его можно купить б/у в достаточно хорошем состоянии.
8883 M (Medium) Motor. Средний мотор

- Мощность - 1,15 ватт
- Крутящий момент при частичной* нагрузке - 5,5 N.cm
- Максимальное потребление тока - 0,85 A
- Минимальное потребление тока (без нагрузки) - 0,065 А
* - нагрузка при которой обороты падают в два раза от максимума.
- Вес- 31 г.
- Провод - четырех-жильный, 20 см
- Размеры - 3x3x6.
- Интерфейс - Lego Technic, Lego System
- Система: Power functions (PF)
Мотор с невысокой мощностью. Широко распространен в наборах LEGO Technic.
Рекомендую использовать для рулевых систем, лебедок, пневмокомпрессоров, моторизации актуаторов, а также различных переключателей: коробок передач, пневмоклапанов и т.д. Применение возможно практически везде, где не требуется высокая мощность (высокая скорость и высокий крутящий момент одновременно).Поэтому для движения моделей данный мотор подходит плохо ввиду маленькой мощности.
Тем не менее, его можно использовать для движения моделей в следующих случаях:
- небольшие легкие модели;
- с понижающей передачей. Крутящий момент тем самым повысится, однако сильно снизится скорость;
- модели с несколькими М моторами для движения, например, по мотору на ось для полного привода или два мотора на ось - задний привод. Можно больше моторов, однако не целесообразно, так как проще установить более мощный мотор (L, XL) сэкономив при этом вес и свободное место.
Отличительной особенностью данного мотора является возможность его крепления к System элементам за счет площадки размером 2x6 снизу.
При использовании в рулевой системе почти всегда необходимо делать понижающий редуктор для большего усилия и точного поворота колес. В своих моделях с небольшой скоростью движения я использую понижение как минимум 8:24 + 12:20. При этом использую белую clutch gear 24 шестерню с проскальзыванием для защиты рулевой от поломки в крайних. Также мотор хорошо подходит для рулевых систем с автовозвратом (возврат колес в центральное положение) с использованием резинок или других конструкций. В этом случае понижающий редуктор не требуется.
Мотор хорошо подходит для прямого подключения к линейным актуаторам практически для всех случаев применения.
К IR ресиверу можно подключать до 4-х M моторов, к одному выходу ресивера до 2-х моторов. ВНИМАНИЕ: для использования 2-х моторов от одного выхода IR ресивера необходимо использовать ресивер старой версии НЕ v2 !
88003 L (Large) Motor. Большой мотор

- Мощность - 2,14 ватт
- Скорость вращения без нагрузки - 390 об/мин
- Крутящий момент при частичной* нагрузке - 10,5 N.cm
- Максимальное потребление тока - 1,3 A
- Минимальное потребление тока (без нагрузки) - 0,12 А
* - нагрузка при которой обороты падают в два раза от максимума.
- Вес- 42 г.
- Размеры - 3x4x7
- Интерфейс - Lego Technic
- Система: Power functions (PF)
Большой мотор впервые появился в наборе 9398. Мотор универсален: обладает высокой скоростью вращения (почти как у М мотора) и достаточным крутящим моментом для движения модели. Преимущество использования данного мотора в качестве движущего - быстрый, легкий, компактный и не "рвет" трансмиссию (как XL). Может использоваться на скоростных машинах, моделях с моно/полным приводом и триальных моделях (не менее 2х моторов). При понижении редуктором итоговый крутящий момент в месте приложения будет немногим меньше чем от XL мотора при равной скорости. Рекомендую для наибольшей мощности использовать по два мотора одновременно - размеры мотора в большистве случае это допускают (в отличие от громоздкого и неудобного XL)
L Мотор может использоваться везде, где мощности М мотора недостаточно - в рулевых системах, строительной технике и т.д.
Из прочих преимуществ мотора - наличие множества крепежных отверстий.
В ближайшее время мотор будет активно использоваться компанией LEGO в новых техник наборах, замещая M мотор (например, набор 2013 года - 42009 Mobile Crane Mk II)
Недостаток, на мой взгляд один: несмотря на заявленную ширину 4 дырки, на практике он занимает в конструкции все 5 дырок, что не всегда удобно.
8882 XL (Extra large) Motor. Экстра-большой мотор

- Мощность - 2,65 ватт
- Скорость вращения без нагрузки - 220 об/мин
- Крутящий момент при частичной* нагрузке - 23 N.cm
- Максимальное потребление тока - 1,8 A
- Минимальное потребление тока (без нагрузки) - 0,08 А
* - нагрузка при которой обороты падают в два раза от максимума.
- Вес- 69 г.
- Размеры - 5x5x6
- Интерфейс - Lego Technic
- Система: Power functions (PF)
Мотор с высокой мощностью. У него невысокая скорость вращения вала, при этом огромный крутящий момент. Отлично подходит для полноприводных внедорожников, грузовиков и триальных машин с меделнной скоростью передвижения и потребностью в большом крутящем моменте.
Оффициально мотор применялся в трех наборах: 8275, 4958 и 8258. Возможно, отказ от его дальнейшего применения в официальных наборах - отзывы потребителей о сломаных деталях. Это мое предположение. Надеюсь, мы еще увидим его в действии. В противном случае, мотор в ближайшем будущем рискует стать дорогим раритетом как 9V Race Buggy мотор.
ВНИМАНИЕ : В руках неопытного строителя мотор часто приводит к сломанным шестерням, карданам и скрученным осям! При постройке модели необходим делать особо прочную трансмиссию для передачи высокого крутящего момента от мотора к колесам. Желательно ставить мотор максимально близко к оси исключая множество осей и передач, тем самым исключая риски поломок и повышая надежность в экстремальных нагрузках.
Постройка скоростных моделей с данным мотором затруднительна и неэффективна ввиду невысокой скорости вращения вала. Повышение скорости вращения за счет повышающего редуктора приводит к потерям крутящего момента.
Кроме движения моделей (8275 и 4958), мотор также подходит для второстепенных функций - там где нужна высокая мощность (как в 8258), или где нет возможности поставить М мотор с понижающим редуктором.
Недостатками данного мотора являются его большие размеры и вес.
В машинах среднего размера используют 1 мотор. В тяжелых и мощных моделях - 2 и больше.
9V Race Buggy Motor. Багги мотор.

- Мощность - 4,96 ватт
- Скорость вращения без нагрузки:
- внешний выход - 1240 об/мин
- внутренний выход - 1700 об/мин
- Крутящий момент при частичной* нагрузке:
- внешний выход - 7,7 N.cm
- внутренний выход - 5,69 N.cm
- Максимальное потребление тока - 3,2 A
- Минимальное потребление тока (без нагрузки) - 0,16 А
* - нагрузка при которой обороты падают в два раза от максимума.
- Вес- 55 г.
- Размеры - 5x5x10
- Интерфейс - Lego Technic
- Система: 9V
Самый мощный лего-мотор. В настоящий момент не выпускается. Высокая скорость вращения вала, при этом достаточный крутящий момент. Отлично подходит для легких и средних скоростных машин. При использовании редуктора можно использовать в триальных моделях.
Мотор использвался в линейке наборов Racers (8475, 8366, 8376), Technic (8421, 8287) в 2002-2006г.в. Сейчас не выпускается. Можно найти "бу" в хорошем состоянии.
Имеет два сквозных выхода с разной скоростью вращения.
ВНИМАНИЕ: мотор необходимо использовать с PF IR приемниками версии 2 (v2, от набора 9398) так как приемники старых версий не дают мотору выйти на полную мощность и при малейшей нагрузке на вал включают защиту от перегрузки. Кроме того мотор можно использовать с блоком радио-управления (уже не выпускается) от набора 8475, который рассчитан на работу с двумя моторами одновременно.
ВНИМАНИЕ: Для подключения к системе Power functions, ввиду разных коннекторов, необходим переходник-удлинитель 9V-PF 20 см (продается отдельно).
Данный мотор мощнее чем XL. В триальных моделях, мотор позволяет ехать с более высокой скоростью. Легким скоростным моделям мотор позволяет достигать высоких скоростей (до 10 км/ч). Кроме того, возможна постройка легких дрифт-моделей.
Ввиду высокого потребления, к одному v2 IR приемнику можно подключить 1 багги мотор (+ маломощный м- или серво- мотор для руления, при необходимости). Кроме того для каждого багги мотора крайне желательно иметь отдельный батарейный блок.
Преимущества: высочайшая мощность и возможность использования в любых моделях.
Недостатками данного мотора являются его большие размеры и крайне неудобное крепление из за Г- образной формы мотора. Мотор потребляет много энергии.
- Размеры мотора - 3х5х7. Имеется множество отверстий для крепления.
- Интерфейс - Lego Technic
- Система: Power functions (PF)
- Скорость вращения мотора без нагрузки - 90 градусов за 0,25 сек, то есть колеса поворачиваются из центрального в крайнее положение за 0,25 сек. На практике скорость вращения сильно зависит от нагрузки.
Этот долгожданный мотор появился впервые в наборе 9398. Мотор сделан для одной цели - поворот управляемых колес как на настоящих машинах. Он не совсем похож на традиционные сервомоторы радиоупраыляемых моделей, однако в нем реализованы функции автовозврата и поворота колес на разные углы.
Вал мотора не вращается бесконечно, как на обычных моторах: он поворачивает на 90 градусов по часовой стрелке и на 90 градусов против часовой. Итого - 180 градусов. При этом, при опускании рычага управления стандартного пульта (или нажатии на кнопку сброс/стоп пульта с плавной регулировкой) мотор возвращает вал в центральное положение (то есть колеса авто встают прямо). Помимо этого мотор позволяет устанавливать 7 различных углов поворота колес в каждую сторону: всего 14 позиций + центральная. Для этого необходим пульт с плавной регулировкой, как в наборах с поездами.
Мотор имеет передний и задний выходы соединенные вместе. Это позволяет легко реализовать поворот одновремнно передней и задней осей.
Если мотор управляется обычным пультом с рычагами: при нажатии на рычаг мотор поворачивается на максимальный угол - 90 градусов.
При управлении мотором пультом с регулировкой скорости мотор будет поворачивать вал постепенно в соответствии с вращением колеса пульта.
ВАЖНО: при строительстве модели вал мотора должен быть выровнен по центру - 4 точки на моторе и оранжевом выходе вала должны лежать на одной линии. Для центровки нужно подключить мотор к любому выходу IR ресивера подключенного к включенному батарейному блоку. В этом случае вы услышите кратковременный звук мотора - центровка произведена. Пульт при центровке трогать не нужно!
Мотор не очень подходит для очень скоростных машин (как правило, они на багги моторах) ввиду относительно медленной скорости поворота вала. Пожалуй, это единственный недостаток. Пусть он вас не смущает - построить очень быструю машину не так то просто. Если вы новичок - сервомотор значительно облегчит вам постройку модели. Модель с таким мотором легче управляется ввиду наличия автоцентровки колес, что очень важно если играть моделью будет ребенок.
В заключение хочу представить вам наглядные сравнительные характеристики от Sariel. Скорость моторов указана "средняя рабочая", а не максимальная. Тем не менее вы можете сравнить и соотнести характеристики моторов между собой.

Читайте также: