
Как сделать дрон из лего техник
Обновлено: 30.04.2024

Из конструктора Лего можно сделать идеально симметричную раму для квадрокоптера.
Искал повод чтобы поиграть с конструктором снова? Вот тебе веская причина :)
Такой дрон дешев, и не требует специальных инструментов как например в этой инструкции (рекомендую взглянуть для сравнения и на нее тоже).
Я использовал набор Лего Техник, потому что у него есть отверстия в "кирпичиках" конструктора.
Мотор и летный контроллер я взял от популярного дрона Hubsan X4 (не нужно покупать дрон целиком, только запчасти).
Достань свой конструктор, смахни с него пыль и вперед!
Шаг 1: Инструменты и материалы
1. Лего
2. Паяльник
3. Пластиковые фиксаторы
1. Полетный контроллер Hubsan 107l или 107c (берите 107l если планируете установить на дрон LED лампочки, 107c если хотите установить камеру)
2. 4 двигателя (типа hollow cup) на 7мм.
3. 4 винта (и если хотите, возьмите один два про запас)
4. Аккумулятор на 3.7 вольта + зарядное устройство.
5. Пульт управления Hubsan
Пульт стоит не мало, если у вас его нет, то возможно выгоднее будет купить старый дрон rtf hubsan x4 и разобрать его на части.
Кстати, если вы совсем новичок, не знаете с чего начать, и этой инструкции вам будет не достаточно, вы можете просмотреть 3 абсолютно бесплатных видео курса , на которых вместе с преподавателем вы сможете собрать и запрограммировать своих первых роботов на Arduino и Raspberry. Дерзайте!
Шаг 2: Паяем полетный контроллер
Нужно будет поработать немного паяльником, но ничего сверх сложного в этом нет. Если вы посмотрите на полетный контроллер, то увидите что места, куда нужно припаять проводку от моторов уже отмечены.
И возможно вы уже знаете, что у квадрокоптеров два мотора двигаются по часовой стрелке, а два против. Очень важно чтобы моторчик, который двигается по часовой стрелке был установлен напротив другого такого же. То же самое касается и моторчиков, которые двигаются в обратном направлении.
На контроллере уже есть немного паяльного олова, но этого может не хватить, так что используйте свое если посчитаете нужным.
Шаг 3: Делаем раму для дрона из Лего

Картинки говорят сами за себя. Не обязательно делать именно такую раму, как сделал я. Включите воображение, и у вас получится что то намного покруче! Главное - не делать раму слишком тяжелой.
Шаг 4: Крепим моторы и контроллер

Я уже упомянул ранее что Лето Техник - идеален для этого проекта, потому что внутри элементов есть отверстия. К ним можно прицепить моторы на пластиковые фиксаторы.
Я также использовал двусторонний скотч, для дополнительного крепления, но он не обязателен.
Закрепите полетный контроллер сверху дрона, а аккумулятор под рамой, и вы готовы к отлету!
Шаг 5: Бесплатный видео курс
Если вы хотите научится программировать роботов, дронов, и контроллеры Arduino, но не знаете с чего начать, и забыли школьный курс физики, рекомендуем пройти бесплатные видео курсы.
В серии курсов вы научитесь собирать простых роботов, познакомитесь и научитесь программировать их при помощи микроконтроллеров Arduino и Raspberry.

 | Алексей Тереньтев автор инструкции |
| Иногда что-то делаю сам, но чаще что-то перевожу. | |


Денис Суслов Думаю он много не потянет, скорее всего только мини камеру, которые обычно используются как скрытые и весят 15-20 грамм.

Евгений Чимнев А можно вместо деталей от Hubsan X4 использовать детали от Cheerson CX-10? Cheerson дешевле будет!
Денис Суслов Cheerson CX-10 Mini ты видимо имеешь ввиду. Он меньше в размерах и дешевле, и моторы у него меньше, значит раму нужно будет делать еще более легкой, либо крепить более мощные моторы, но не уверен что это сработает. Хотя, учитывая его цену в 15$ можно попробовать.

Василий Сосновский Читаю, но мало чего понимаю :( А собрать хочется! Может есть какой то материал по общей концепции квадрокоптеров, какие основные части и т.п? Чтобы собрать хотя бы минимальную версию.
Денис Суслов Просто пройдись по инструкции еще раз выполняя шаг за шагом, думаю справишься, а если нет, напиши по каким именно шагам есть вопросы!Вообще концепция квадрокоптеров довольна простая на самом деле: контроллер, батарейки, моторы и винты. Контроллер - это мозг. В нем есть гироскоп и акселерометр, rf приемник и он крутит моторы. Конфигурировать ничего не требуется, при включении коптер сам настраивает себя, сам себя калибрирует, но важно чтобы поверхность на которой он стоит была ровной, точно горизонтальной, иначе исходные показатели о горизонте у него будут не точными.

Николай Мамадаев У меня есть коптер FQ777-124 и мне вот хочется его в другой корпус поместить. Может быть на 3D принтере его распечатать.

Игорь Мотовилов А чем текущий корпус не устраивает? Просто это вроде как карманная модель, из лего конечно корпус к такой сделать скорее всего не выйдет, по аэродинамическим показателям как минимум, а на 3D можно напечатать, да.

Как известно, технически сложные игрушки стоят довольно дорого, и не каждый может их купить. К примеру, Лего квадрокоптер, о котором мечтают многие дети, вполне можно сделать самостоятельно. Для этого не обязательно быть специалистом, достаточно хоть немного разбираться в технике.
В наше время выпускается огромное количество разнообразных игрушек для всех возрастов. Но самые интересные варианты, как и раньше, делаются только своими руками. В современном мире с его возможностями и игрушки получаются более технически мощными и продвинутыми. Если ребенок, подросток либо взрослый человек знаком с техникой и обладает даже минимальными навыками в работе с различными агрегатами и конструкциями, то у него есть возможность создавать интереснейшие вещи. Такие либо стоят в магазинах очень дорого, либо их и вовсе невозможно приобрести.

Одной из желанных, но очень дорогих игрушек, является квадрокоптер. В последнее время подобные устройства пользуются огромной популярностью у людей разных возрастов. Но стоит такая вещь дорого. Да и нет гарантии, что купленный продукт будет работать так, как ожидается. Поэтому многие стараются самостоятельно собирать дроны. В этом нет ничего особо сложного, если у мастера имеются некоторые технические навыки. Но часто проблема заключается в том, чтобы найти подходящую раму для объекта. И тут на помощь может прийти старый добрый Лего. Эти минифигуры дают возможность изготовить не только прочную, но и правильную рамку, с которой квадрокоптер будет летать так, как положено.
Существует огромное количество вариантов конструкторов. Это может быть и оригинальный европейский Лего, и его аналоги, сделанные в Китае. Качество элементов, как правило, не особо отличается. Главную функцию кубики выполнять будут в любом случае, поэтому разницы нет никакой.
Инструменты для изготовления дрона из конструктора
Для того чтобы разработать действительно надежный и правильно функционирующий квадрокоптер, понадобится немало элементов от Лего либо его аналогов, пластиковые фиксаторы и инструмент для спайки деталей. Это необходимо для того, чтобы собрать непосредственно каркас.

Кроме того, нужны детали для создания самого летающего аппарата. Для этого понадобится полетный контроллер, 4 двигателя на 7 мм, 4 винта для крепления м мощная аккумуляторная батарея. Кроме того, стоит сразу продумать вопрос пополнения энергии. Для этого можно использовать стандартное зарядное устройство. Чтобы летательный аппарат поднимался в воздух, летал и приземлялся по желанию человека, нужен пульт управления.
Стоимость этих элементов будет достаточно высокой, если выбрать качественные материалы. Поэтому некоторые мастера идут более простым путем. Они просто приобретают старые дроны, которые продают на запчасти практически за бесценок, а после используют их для создания новой конструкции на основе рамки из Лего.
Работа над полетным контроллером
Для выполнения данной задачи нужны некоторые особенные навыки. Речь идет об умении управляться с паяльником. Он понадобится для того, чтобы соединить полетный контроллер с моторами. Чаще всего на запчастях уже имеются отметки, по которым можно определить, что и с чем нужно соединять.

Мастера, которые уже знакомы с техническими характеристиками квадрокоптеров, знают о том, что тут необходимо 4 моторчика, из которых 2 будут двигать лопасти по часовой стрелке, а еще 2 — против. Один элемент в обязательном порядке устанавливают напротив второго аналогичного.
Припаять все детали нужно максимально качественно. Как правило, на контроллере уже имеется определенное количество паяльного олова, но его не всегда оказывается достаточно, поэтому приходится добавлять из своих запасов.
После того как моторчики будут в правильном порядке соединены с контроллером, можно переходить к следующему шагу. Но для начала стоит провести тесты и проверку качества, чтобы в полете у аппарата ничего не отвалилось.
Изготовление рамы
Это уже более простая и в каком-то смысле даже творческая работа. Из элементов конструктора можно изготовить любой вариант рамы. Главное, чтобы он был с 4 конечностями абсолютно равной длины для соблюдения баланса. Стоит заметить, что для летательного аппарата очень большую роль играет вес. Поэтому не стоит перегружать квадрокоптер лишними деталями, которые не будут выполнять техническую роль, а станут лишь украшением.

Самый простой вариант — это сделать из элементов конструктора крестообразную рамку. Стоит заметить, что квадрокоптер может быть изготовлен не только из стандартных элементов конструктора Лего, но и из деталей от набора Лего-техник. Они отличаются тем, что внутри блоков имеются отверстия. Через них будет в дальнейшем очень удобно крепить моторы. Но такой вариант не является обязательным. Из обычных элементов выходит не менее качественная и удобная рамка для дрона.
Окончательная сборка
В завершении всей работы нужно соединить детали между собой. Если для создания рамки был использован Лего-техник либо иной похожий конструктор, то сложностей не будет никаких. Тут можно использовать пластиковые фиксаторы, при помощи которых элементы двигателя и контроллер с аккумулятором будут надежно закреплены. В случае когда для работы были взяты обычные блоки, в них придется проделать отверстия, а после закрепить все на пластиковые фиксаторы. Полетный контроллер крепится с верхней части рамы, а аккумуляторная батарея будет расположена внизу.

Для большей надежности стоит использовать двусторонний скотч. Он не даст элементам во время полета перемещаться либо съезжать на бок, что не скажется на управлении квадрокоптером.
Полезные советы
Все тщательно проверив, можно будет приступать к запуску. Первый полет стоит проводить на открытой местности. Это позволит более качественно проверить работу и расстояние действия пульта дистанционного управления и позволит избежать аварий. Будет очень неприятно, если из-за технических недочетов будет разрушена конструкция, на которую было потрачено столько времени и сил.
Для первых испытаний нужно выбрать наиболее подходящий день. Лучше, если это будет солнечная и спокойная погода. Никогда не стоит запускать квадрокоптер при дожде либо ветре. Кроме того, стоит первое время исключить полеты в людных местах. Это позволит избежать многих проблем. Использовать свой летательный аппарат там, где бывает много людей, можно только в том случае, если дроном управляет настоящий мастер с большим опытом. Иначе подобными устройствами возможно нанести травмы и испортить имущество, что повлечет за собой негативные последствия для владельца квадрокоптера, в том числе и немалые штрафы. Поэтому технику безопасности нужно соблюдать обязательно.
До Нового Года осталось совсем ничего, а в голове ни одной интересной мысли относительно подарка, да и лишних денег сейчас нет. Знакомая ситуация? В ближайшие пару месяцев я буду часто рассказывать о новых идеях с подарками, и сегодня хочу начать с оригинальной игрушки, которая доставит радость не только ребенку, но и нам, взрослым.
Речь пойдет о простом конструкторе в стиле Lego, который позволит за считаные минуты собрать настоящий квадрокоптер. Согласитесь, каждый ребенок, даже тот, которого, казалось бы, уже ничем не удивить, будет рад получить и самостоятельно собрать дрон. При этом, он обойдется примерно в 1200 рублей.
Итак, конструктор, название которого определить довольно сложно, поставляется в виде деталей Lego, четырех двигателей в сборе, платы контроллера, аккумулятора и зарядного устройства для него. Кроме этого в комплект входит миниатюрный джойстик, комплект запасных пропеллеров и иллюстрированное руководство по сборке.

Замечу, что руководство пользователя недостаточно полное. Например, мне было непонятно, какой из двигателей должен быть “A”, а какой “B”. Если их перепутать местами, то вместо полета “квадрик” будет крутиться на месте. Опытным путем было установлено, что двигатель “A” имеет провода сине-красного цвета, в то время, как двигатели “B” – оборудованы черно-белым проводом.

В собранном состоянии квадрокоптер легко помещается на ладони и весит всего 45 грамм. Не скажу, что его конструкция очень надежна, но для домашней игрушки она вполне годится. В основе контроллера лежит шести осевой гироскоп. На плате имеется единственный светодиод, позволяющий определить состояние дрона.

К шасси дрона плата крепится с помощью обычных фиксаторов LEGO, между которыми проложено амортизирующее кольцо. Это, кстати, является самым уязвимым местом в конструкции дрона. При жестком падении, эти фиксаторы вылетают. При желании, их можно склеить и тогда подобная проблема исчезнет. Обратите внимание на то, что дрон не имеет защитного корпуса, поэтому запускать его на улице не стоит. Влага может повредить плату контроллера.

Для питания дрона используется миниатюрный Li-Pol аккумулятор, емкостью 350 мАч. Аккумулятор устанавливается под платой контроллера. Зарядка аккумулятора осуществляется от простого USB адаптера. Одной зарядки аккумулятора хватит примерно на 4-6 минут полета.

Управление дроном осуществляется с помощью миниатюрного джойстика, работающего на частоте 2.4 ГГц и имеющего дальность до 50-60 метров. Несмотря на игрушечный внешний вид, джойстик оказался вполне взрослым. Он поддерживает тонкую настройку обоих курков во всех плоскостях, позволяет легко удерживать высоту и менять скорость полета. Для питания джойстика используются три батарейки типа ААА.
Пришло время поделиться впечатлениями. Дрон из LEGO оказался достаточно резвой “мухой”. Приручить его удалось не сразу, но привыкнув к управлению, понимаешь, что он довольно устойчив и послушен в полете. Его миниатюрные размеры, позволяют запускать его в домашних условиях, устраивая различные соревнования на точность и скорость прохождения каких-либо препятствий. Если вы думаете, что этот дрон интересная, но бесполезная игрушка, то глубоко заблуждаетесь. Помимо поднятия настроения, он позволит приобрести новые навыки, отработать новые приемы полета и подготовится к запуску более дорогих квадрокоптеров.
Мы обожаем LEGO и Crazy Circuits [LEGO-совместимая электроника / прим. перев.], поэтому решили скомбинировать их в простого и интересного робота, умеющего обходить препятствия. Мы покажем, как собрать такого робота и подробно опишем этот процесс. Ваша версия робота может не полностью совпадать с нашей.

Приводим список необходимой электроники и деталек LEGO. Не бойтесь экспериментировать с ними.


Комплектующие
Электроника
- 1 x плата Robotics Board от Crazy Circuits
- 2 x совместимый с LEGO сервомотор полного вращения
- 1 x ультразвуковой датчик расстояния HC-SR04
- 4 x джампер-кабеля «мама-мама»
- 1 x внешний источник питания с USB
Мы использовали различные детальки, а вам рекомендуем сделать так, как вы считаете нужным, и из того, что есть у вас на руках. Важно, чтобы у вас был способ приделать сервомоторы снизу, ультразвуковой датчик – так, чтобы он смотрел вперёд, и каким-то образом закрепить плату и источник питания. Для этого можно использовать двусторонний скотч, резинки, липучку. Приводим ссылки на наши детальки в магазине BrickOwl, однако вы можете купить их где угодно, где продаётся LEGO и совместимые наборы.
- 2 x LEGO Wedge Belt Wheel (4185 / 49750)
- 1 x LEGO EV3 Technic Ball Pivots Set 5003245
- 1 x LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- 1 x LEGO Technic Brick 1 x 6 with Holes (3894)
- 2 x LEGO Axle 4 with End Stop (87083)
- 4 x LEGO Half Bushing (32123 / 42136)
- 4 x LEGO Brick 2 x 2 Round (3941 / 6143)
- 1 x LEGO Plate 6 x 12 (3028)
Шаг 1: строим шасси из LEGO

Мы начали с пластинки LEGO 6×12, это был минимальный размер, который нас устроил. Можно использовать более крупную, однако мельче уже будет сложнее.
Ширина робота определялась имеющимся у нас в наличии внешним источником питания, поскольку нам была нужна возможность вставлять его на место. Для аккумулятора большего размера потребуется робот большего размера.
Шасси должно быть достаточно высоким, чтобы на нём разместилась и батарея, и плата сверху.
Шаг 2: добавляем колёса







Каждый сервомотор нужно разместить снизу шасси. В итоге нам понадобились следующие комплектующие:
- Ось 4 LEGO со стопором (87083)
- Втулка LEGO (32123 / 42136)
- Круглый кирпичик LEGO 2 x 2 (3941 / 6143)
Как и с другими модельками LEGO, вариантов тут масса! У нас получилось с теми комплектующими, что мы перечислили, а вы можете попробовать что-нибудь другое.
Шаг 3: добавляем ролик




Наш ролик позволяет роботу кататься по плоскости на двух моторизованных колёсах, играя роль третьего колеса – так роботу легче поворачивать и двигаться.
Для его закрепления потребовались следующие детали:
- LEGO EV3 Technic Ball Pivots Set 5003245
- LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- LEGO Technic Brick 1 x 6 with Holes (3894)
Шаг 4: добавляем датчик расстояния



Ультразвуковой датчик расстояния нужно закрепить на передней части робота, чтобы он «видел», куда едет, и понимал, когда нужно остановиться, чтобы не столкнуться с препятствием.
Если 3D-принтера у вас нет, придумайте, как удержать датчик при помощи деталек LEGO, клейкой ленты, резинок, хомутов и т.п. Важно, чтобы он смотрел прямо – туда, куда едет робот, когда движется вперёд.
Шаг 5: добавляем плату




Плата – мозг всей операции. Она размещается наверху кубиков LEGO, поэтому её крепить легко.
Обычно плата Robotics Board используется совместно с проводящей плёнкой, позволяющей мастерить электрические цепи прямо поверх LEGO, но поскольку у нас тут всего лишь два мотора и датчик расстояния, их можно подключить напрямую к штырькам на плате.
Плату размещаем так, чтобы USB-кабель питания было легко воткнуть. Нам повезло найти в коробке с кабелями очень короткий USB-кабель.
Теперь можно подключать датчик и моторы!
По датчику: разъём echo нужно подключить к контакту 3 на плате, разъём trigger – к контакту 5, VCC – к 5 В, Gnd – к GND. Таким образом датчик будет получать питание и общаться с платой.
Затем нужно подключить каждый из моторов. Это сделать легко – коричневые провода на GND, красные – на 5 В, оранжевые – к контакту D6 для левого мотора и D9 для правого.
Шаг 6: программируем Robotics Board

Перед тем, как робот сможет работать, нужно загрузить код в микроконтроллер. Перед этим убедитесь, что у вас на компьютере установлена последняя версия Arduino IDE.
Свой код мы выложили в репозиторий на GitHub:
Код простой, в нём много комментариев, чтобы было понятно, что за что отвечает.
Вам также потребуется библиотека NewPing
Шаг 7: пускаем робота погулять



Построив робота и загрузив в него код, можно переходить к испытаниям!
Проще всего подключить внешний источник питания и дать роботу возможность ехать вперёд. Если выставить перед ним руку, он должен отодвинуться назад, повернуться и снова поехать вперёд (смотрите, чтобы он не съехал со стола!)
Мы построили простую шестиугольную «арену» из картона, чтобы роботу было где поездить. Не бойтесь экспериментировать с тем, что есть у вас.
Шаг 8: дальнейшее развитие


Если вам интересно развивать этот проект, вот вам вопросы:
— что вы узнали, собирая робота?
— что повлияло на ваш выбор деталей?
— поедет ли робот быстрее, если увеличить ему колёса?
В коде есть две переменных, исправив которые, вы измените время отката робота назад при обнаружении препятствия, и время, которое он будет поворачиваться. Попробуйте поменять goBackwardTime и turnRightTime и посмотреть, как это повлияет на поведение робота.
Сделать квадрокоптер своими руками можно из чего угодно! Квадрокоптеры собирают из линеек, из коробки, из труб, даже из бумаги. А на этот раз - самодельный квадрокоптер был собран из лего конструктора!


Самое сложное в этой сборке - отобрать у ребенка конструктор вертолета Lego 60193 Arctic Air Transport, а сделать из нее действующую модель квадрокоптера уже не сложно! Основной задачей при изготовлении квадрокоптера, помимо летных качеств, было сохранить как можно больше оригинальных частей.
Видео полетов этого самодельного дрона вы можете посмотреть в конце статьи.
Итак, для изготовления такого квадрокоптера мастер использовал следующие
Инструменты и материалы
-Вертолет LEGO City Arctic - 60193 :
-Контроллер и ESC 20x20 мм, например, HGLRC XJB F428 Micro F4 AIO OSD:
-Бесколлекторные моторы RaceStar 1806 - 4 шт:
-Пропеллеры:Kingkong LDARC 5x4.5x3:
-Аккумулятор 2s 1000mah lipo:
-Разъемы;
-Провода;
-Радиомодуль (передатчик и приемник);
-Крепеж;
-Нож;
-Паяльник;
-Клеевой пистолет;
-Отвертка;
-Дрель;
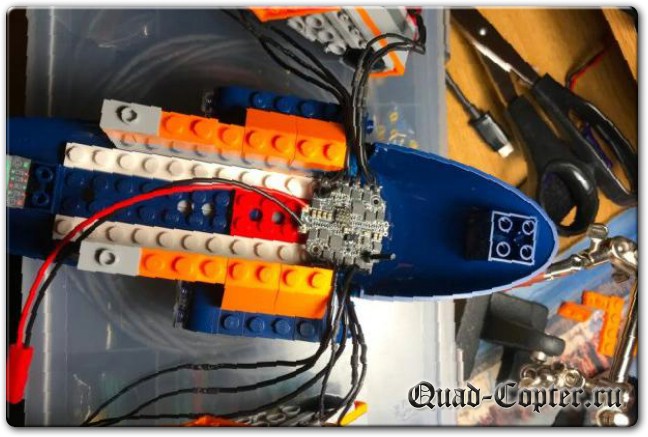
Шаг первый: сборка Лего
Сначала мастер собирает LEGO-Arctic. Затем модель частично разбирается. Внутри нужно разместить батарею и контроллер, соблюдая балансировку модели.



Шаг второй: крепление двигателя
Расположение крепежных отверстий стандартного бесщеточного мотора 1806 практически такое же, как и у шпилек на стандартной пластине LEGO 2x2. Каждое крепление «двигателя» на квадрокоптере имеет плитку темно-серого цвета 2x2 (LEGO 3022) и сверху плитку светло-серого цвета 2x2 с вертикальным штифтом (LEGO 2460), которая обычно удерживается на ступицах пропеллера LEGO.
Мастер сверлит крепежные отверстия. На моторах, по центру имеется отлив. По центру плитки сверлится отверстие под нее. Закрепляет двигатели.









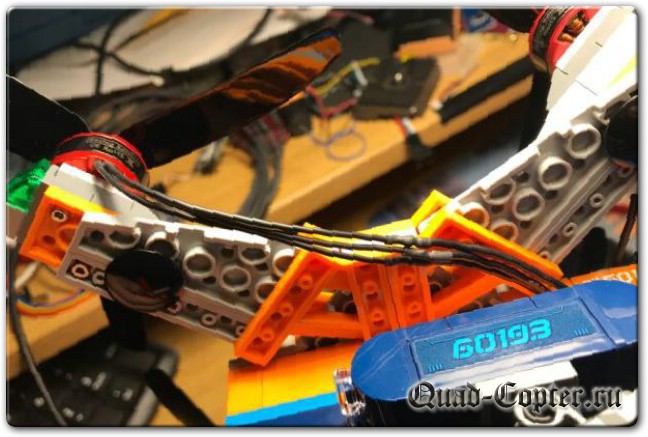
Шаг третий: плечи
Переставляя «плечи» квадрокоптера, можно немного изменить компоновку, чтобы обеспечить более широкое или более узкое расположение двигателей и расположение винтов относительно друг друга.
Стандартная сборка LEGO (первое фото) имеет «плечи» и двигатели, расположенные широко (горизонтально) с довольно большим перекрытием винтов. Мастер переделывает «плечи» и разводит двигателя и, соответственно, винты.



Шаг четвертый: электроника
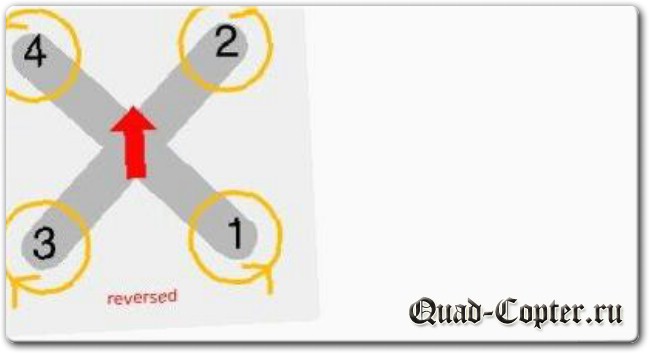
Согласно схемы производит монтаж электроники. На первом фото приведена схема направления вращения двигателей. Направление вращения, так же, можно будет изменить на этапе программирования.
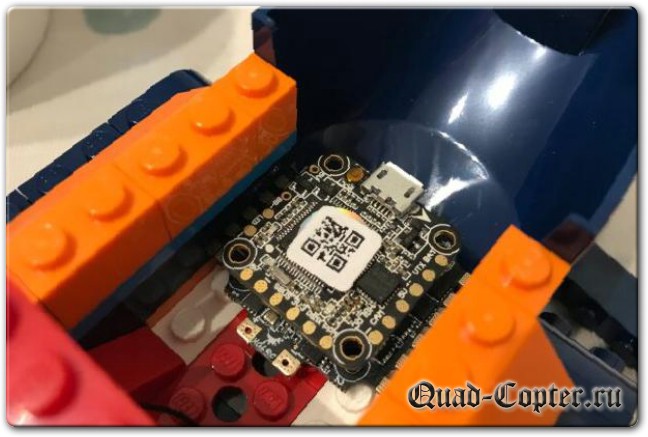

После того, как монтаж завершен, и перед подключением батареи, мастер проверяет соединения, во избежания обрыва или замыкания.
При включении питания вы должны увидеть включенные огни контроллера полета и несколько звуковых сигналов от ESC.
Шаг пятый: настройка
Теперь, когда все подключено, пришло время настроить контроллер. Это означает загрузку программного обеспечения (встроенное программное обеспечение), которое выполняет задачу декодирования управляющих сигналов от передатчика RC, обработки входного сигнала датчика (ускоритель, гироскопы) и предоставления управляющих сигналов для ESC для вращения двигателей с заданной скоростью.
Снимите пропеллеры для безопасности! Батарея не требуется для первых нескольких шагов настройки, только питание USB.
Подсоедините кабель micro USB к контроллеру полета. Обратите внимание, что это может быть легче сделать, если контроллер не прикручен к корпусу
Скачайте и залейте соответствующую прошивку для контроллера полета.
Настраивает режимы.
ARM вкл / выкл
HORIZON для самовыравнивания / ACRO для традиционного полета FPV
BEEPER - полезно, если вы потеряете модель в высокой траве или кустах.
Вкладка «Моторы» - используйте эту опцию для проверки каждого двигателя в отдельности, и, что важно, отметьте направление вращения каждого из них
Исправьте любое неправильное направление вращения с помощью конфигуратора BLHELI
После всех этих шагов можно отключить USB и батарею, а затем включить питание и проверить, что все работает:
Включить передатчик и питание
Подключите батарею и установите квадрокоптер на ровном участке поверхности
Включите переключатель ARM, и моторы должны начать вращаться с низкой скоростью
Проверьте дросель увеличивая обороты
В горизонтальном режиме попробуйте наклонить квадрокоптер и убедитесь, что двигатели реагируют соответствующим образом, например, наклоните его вперед, и передние двигатели будут ускоряться.












Шаг шестой: окончательная сборка
Практически вся конструкция корпуса держится с помощью монтажных замков. Единственно при креплении моторов мастер использует термоклей.
Читайте также: