
Как сделать из лего робота на пульте управления
Обновлено: 26.04.2024
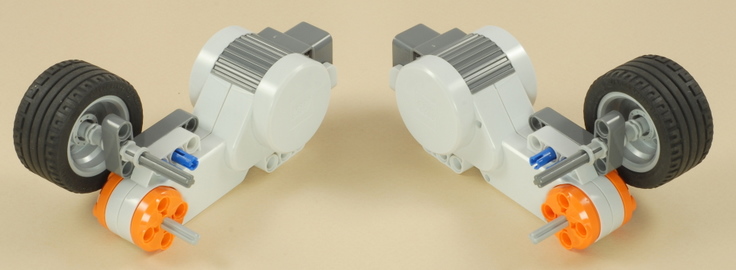
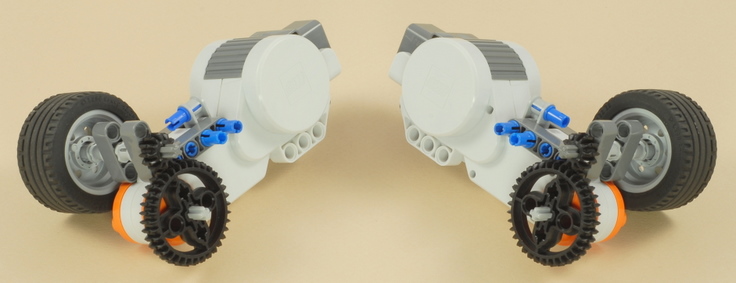
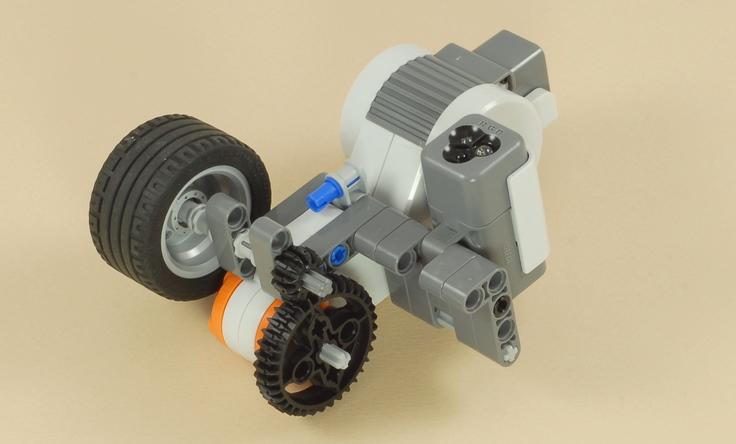
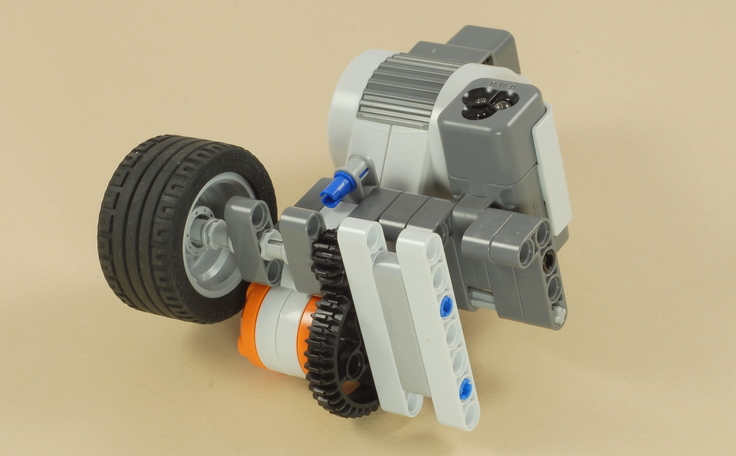
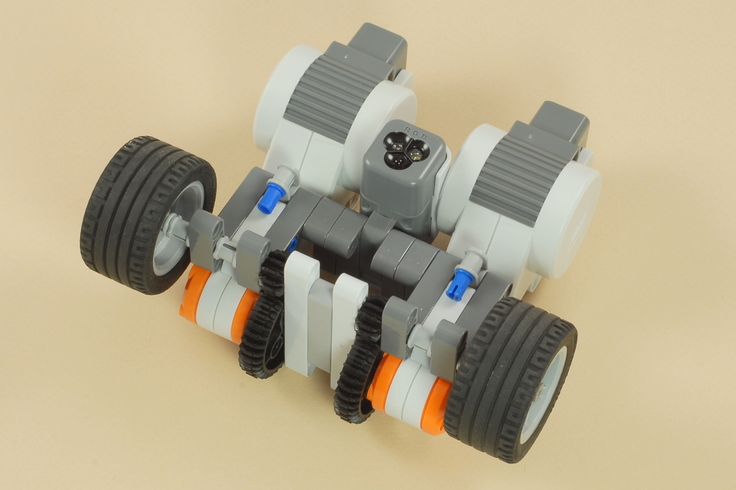
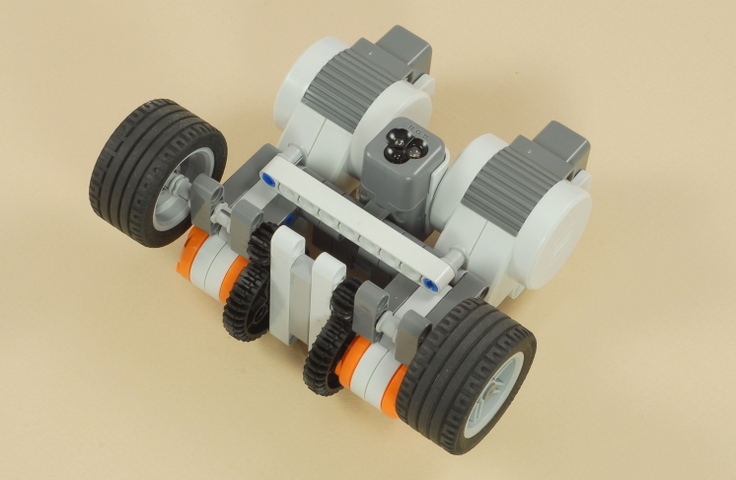
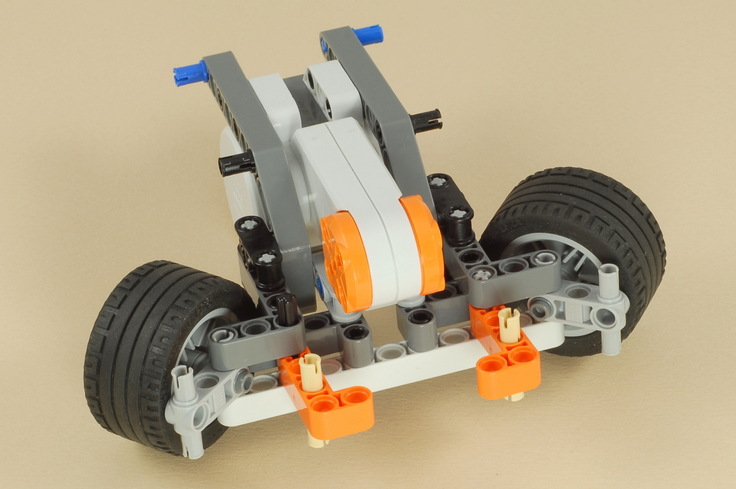
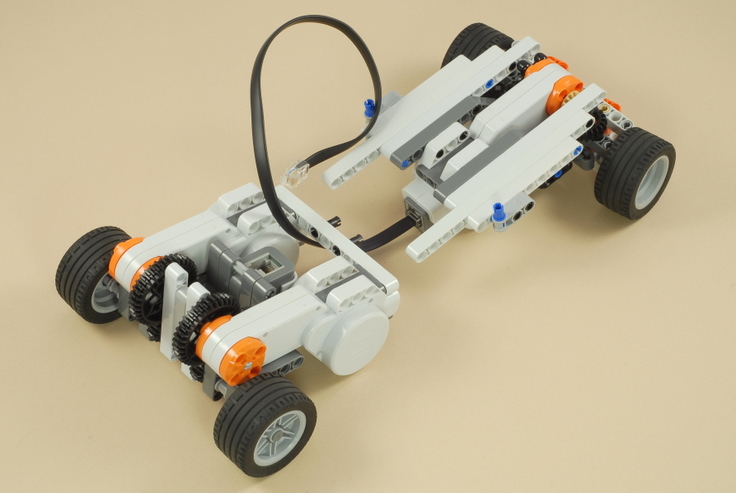
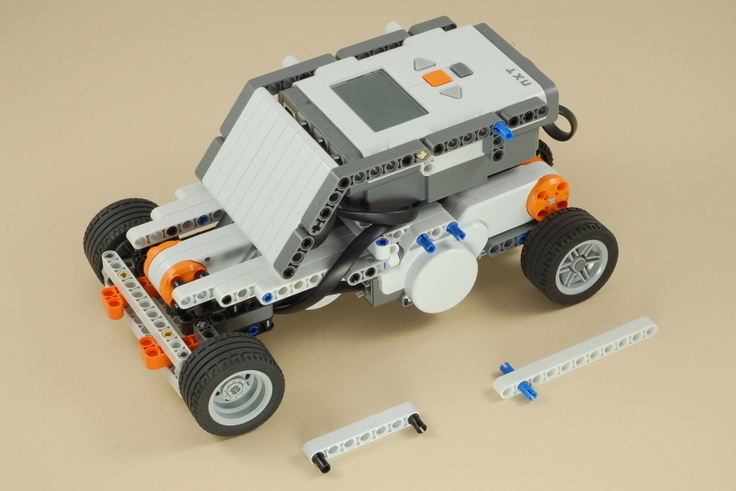
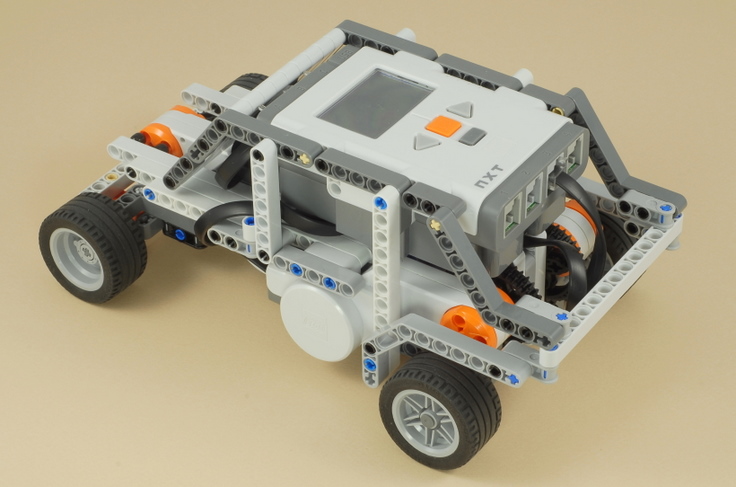
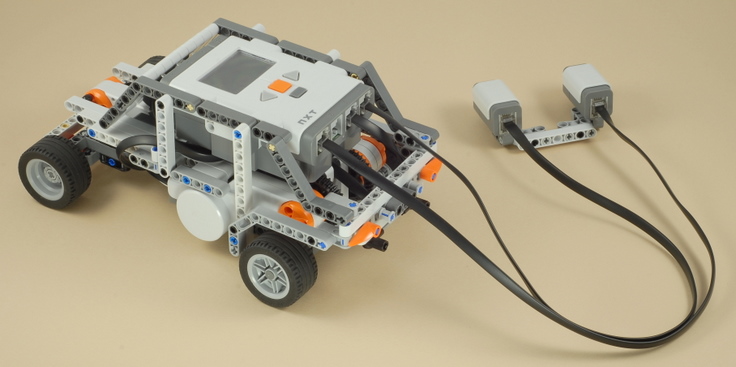
Этот автобот выглядит и управляется как настоящий автомобиль! Констуктивно он разработан так, что передние колёса имеют поворотную платформу и поворачиваются с помощью двигателя. В конструкции также есть "хитрые" шестерёнки, увеличивающие скорость вращения задних ведущих колёс.
Датчик цвета находится под гоночной машиной лего так, чтобы автомобиль мог совершать простые автономные операции, считывая цвет поверхности. Датчик может распознать шесть различных цветов, так что вы можете сделать автомобиль, который будет реагировать на различные цветные линии, цветные полосы бумаги и т.д.
Вы также можете управлять автомобилем с помощью дистанционного управления или с простого двухкнопочного проводного пульта дистанционного управления (требуется только один NXT комплект) или беспроводным Bluetooth-пультом дистанционного управления от другого NXT. Примеры пультов: 5-и кнопочный пульт дистанционного управления (пульт ДУ) или удаленного рулевого управления. Специализированные программы для всех этих трех пультов дистанционного управления имеются. Их можно скачать бесплатно.

Автономная работа с цветом датчика

Проводной двухкнопочный пульт дистанционного управления

Беспроводной Bluetooth блок управления с 5-ю кнопочным пультом дистанционного управления

Беспроводной Bluetooth блок управления с удаленным рулевым управлением
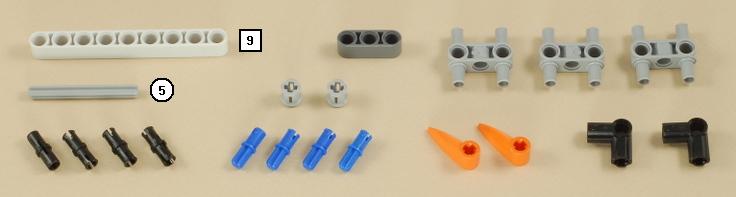
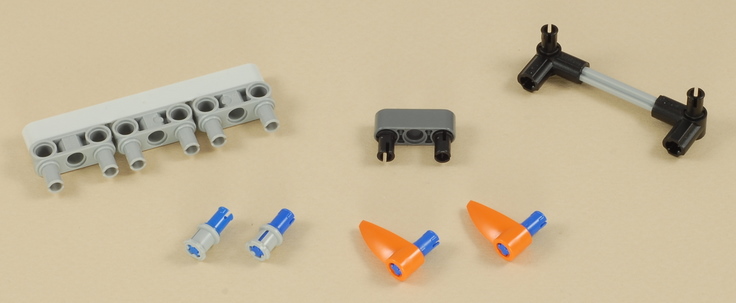
Инструкция по сборке машины из лего







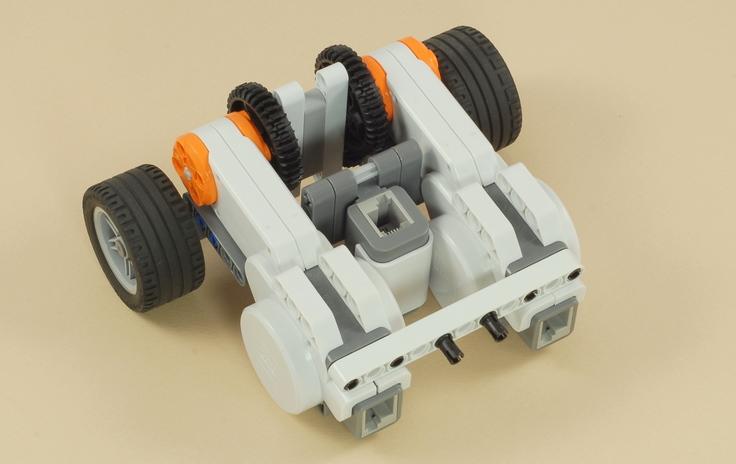
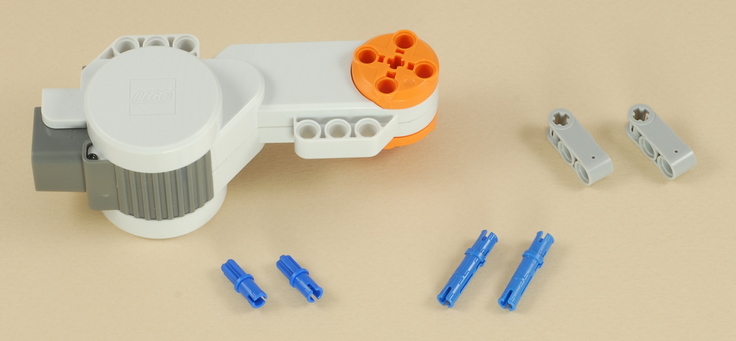
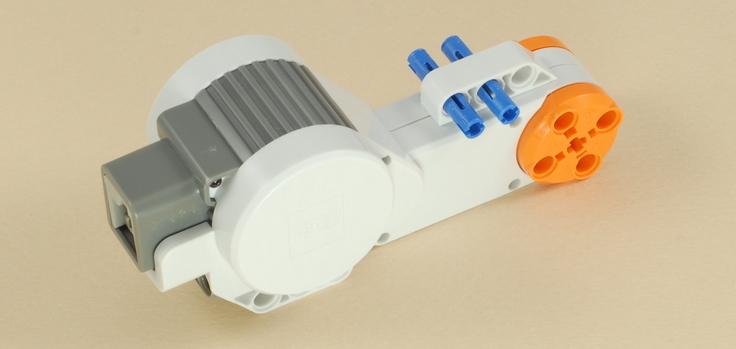
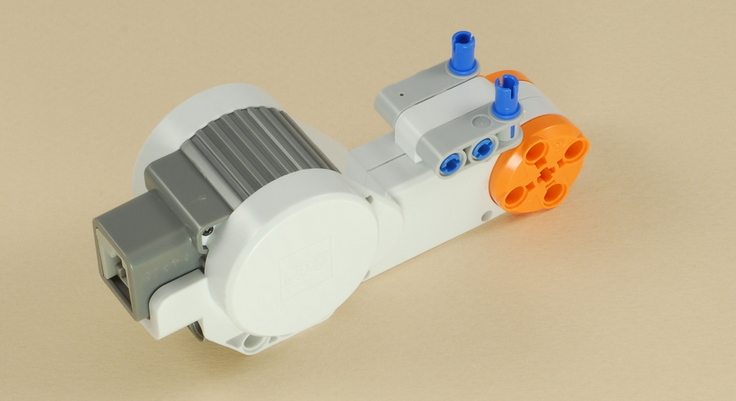
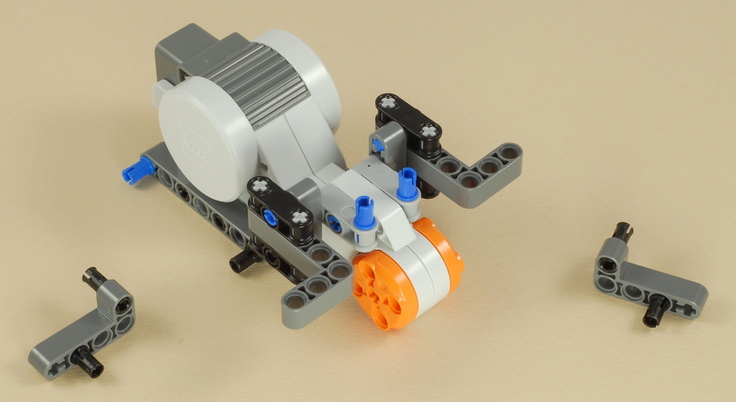
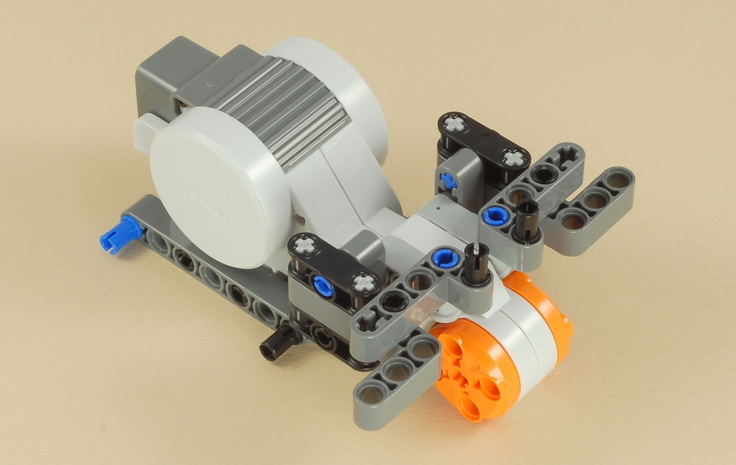
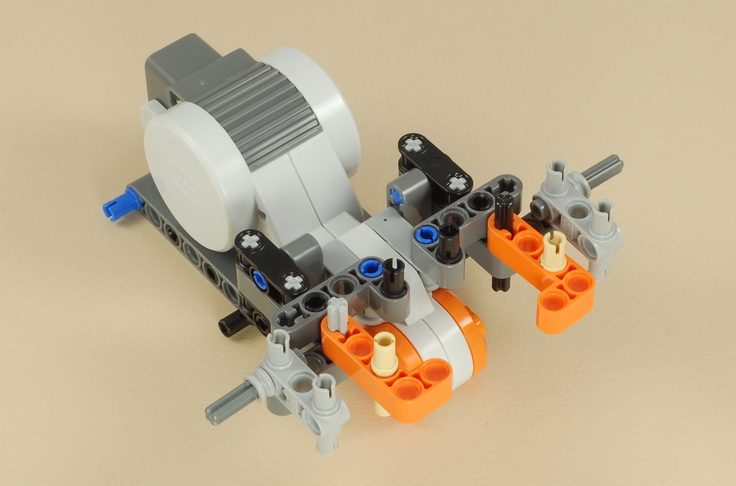
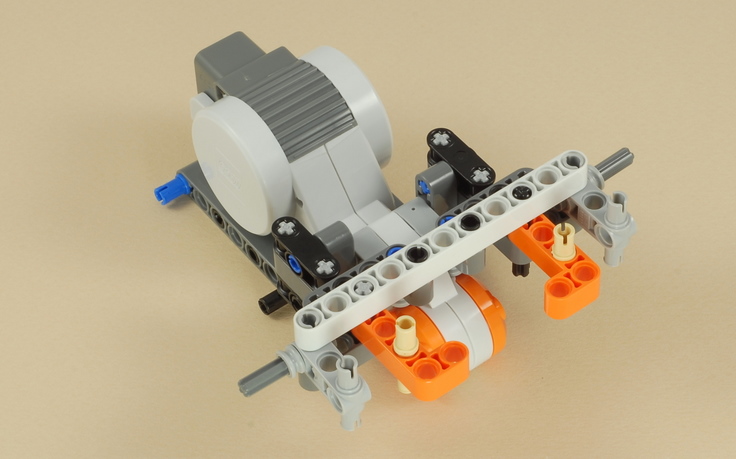





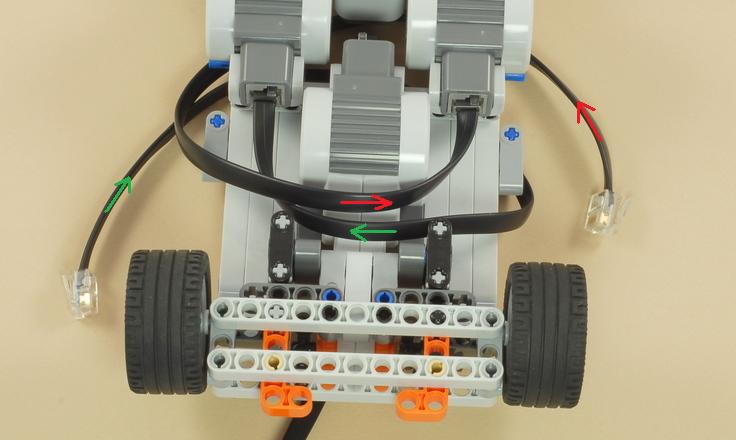



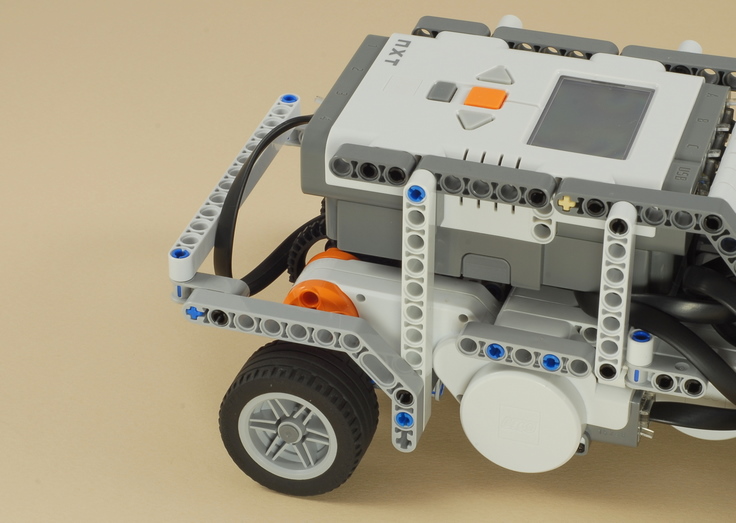
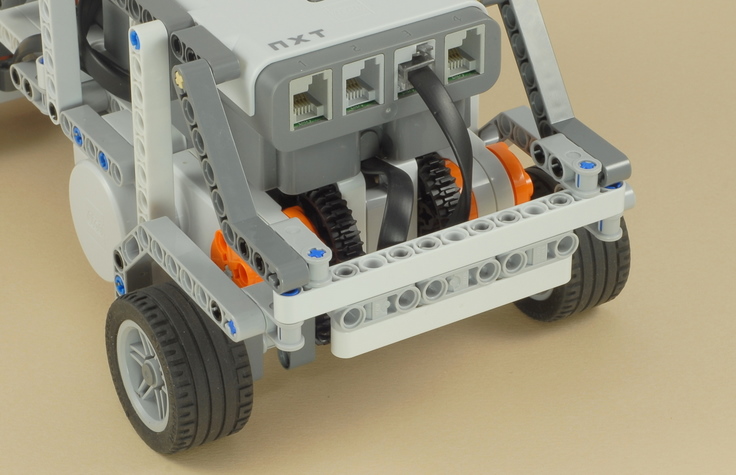
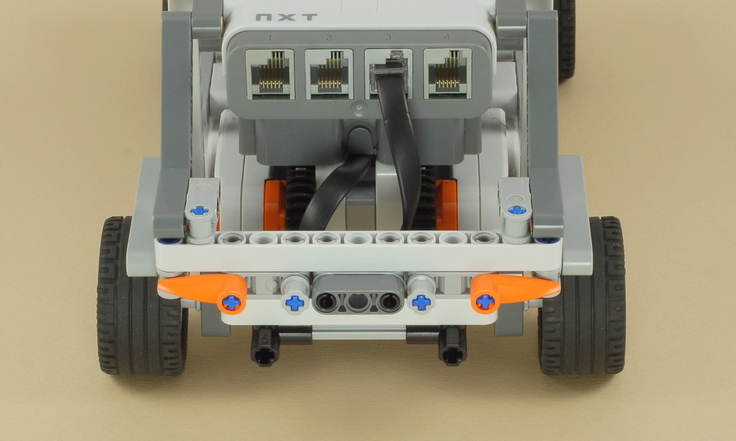
Провод датчика цвета должен выйти из пространства в центре задней панели блока NXT. Подключите его к порту 3 на контролере NXT.
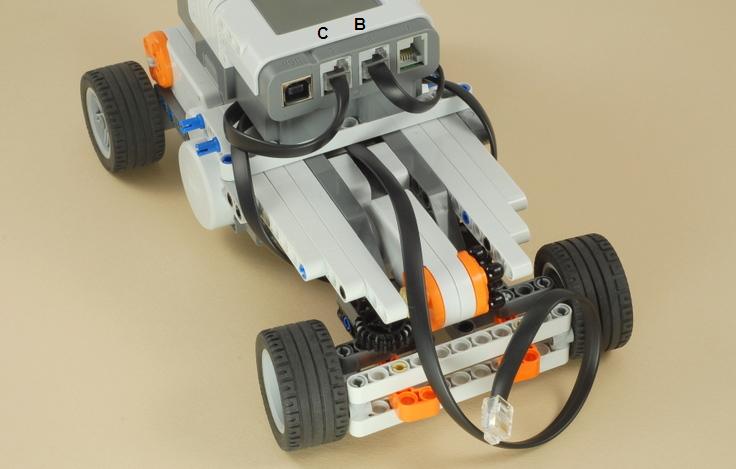
Два двигателя подключите к портам В и С на блоке NXT. Провода должны быть пересечены дважды (один раз у блока NXT и в другой раз под лего-машиной), так чтобы двигатель B оставался по левой стороне автомобиля и двигатель C находится на правой стороне.
Провод рулевого двигателя передних колёс должен выйти из пробелов в центре передней панели NXT. Скрутите провод пару раз, чтобы он занимал меньше места и лежал компактно (смотка будет скрыта за лобовым стеклом построенного позже), а затем подключить его к порту на NXT.









Поздравляем, лего машина на пульта управления готова к настройке программы и дальнейщим испытаниям.
Итого получится четыре программы: две для автобота с одним блоком NXT, и две для удалённого управления по Bluetooth, предназначенные для использования с 5-и кнопочным пультом дистанционного управления и удаленного рулевого управления (обязательно наличие двух NXT блоков).
Простая программа NXT:
Программа ColorRace демонстрирует несколько примеров автономного поведения, используя цвет датчика реагировать на изменения цвета поверхности. Вы можете создать короткий «курс» на автомобиль, чтобы двигаться и отметить действия с разноцветными ленты или полоски бумаги. Цвет датчика может смысле шести различных цветов, и в этом примере программы действий для шести номеров цвета:
1. Черные: Игнорируется
2. Синий: Поверните налево (начало поворота на первый синей линии, остановка поворот на втором синяя линия)
3. Зеленый: Скорость до полной мощности
4. Желтый: Замедление до 30% мощности
5. Красный: Стоп
6. Белый: Игнорируется
Лего автомобиль должен быть запущен с передними колесами указал прямо перед собой (корректировать их, прежде чем начать программу, повернув ручку колеса на рулевой двигатель), и начнем прямо вождения медленно.
Обратите внимание, что автономную работу сложно, потому что есть ограниченный контроль, а также руководящий много механических "помои" в нем, что позволяет получать прямой старт и последовательным оказывается сложной задачей.
Вам также может понадобиться изменить цвета, используемые в программе для корректировки цвета вашего пола и маркеры используются. Чтобы проверить, какой цвет автомобиля видит на различных поверхностях, используйте View » Color функцию в меню кирпича NXT-н-ролл автомобиля по различным поверхностям.
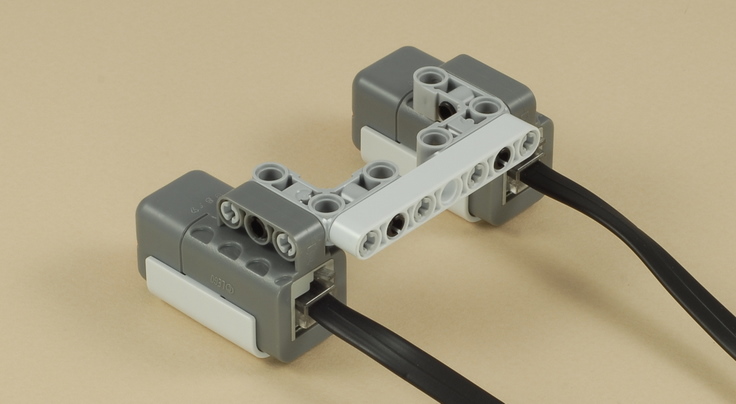
Программа 2ButtonSteer будет контролировать Race Car с двумя сенсорными датчик проводной пульт дистанционного управления, показанный в шаге 22 здания выше инструкции. Автомобиль должен быть запущен с передними колесами указал прямо перед собой (корректировать их, прежде чем начать программу, повернув ручку колеса на рулевой двигатель). Нажмите и удерживайте обе кнопки идти ехать прямо, нажмите и удерживайте нажатой одну кнопку, чтобы включить в этом направлении, и отпустить обе кнопки, чтобы остановиться. Вы также можете настроить скорость автомобиля с помощью стрелка влево и вправо Стрелка на NXT.
Bluetooth управляющих программ (Два NXTs обязательно):
Программа 5ButtonSteer является управляющая программа для Race Car, который предназначен для использования вместе с 5 Кнопка удаленного управления проектом. См. инструкции для этого проекта.
SteerBTCar программа управляющая программа для Race Car, который предназначен для использования вместе с удаленного рулевого управления проектом. См. инструкции для этого проекта.
Некоторые части конструкции гоночного автомобиля предназначены только для "украшения", чтобы сделать его похожим на машину. Попробуйте зачистки его вплоть до предметов первой необходимости, а затем создать собственное тело для того, чтобы придать ему другой вид.
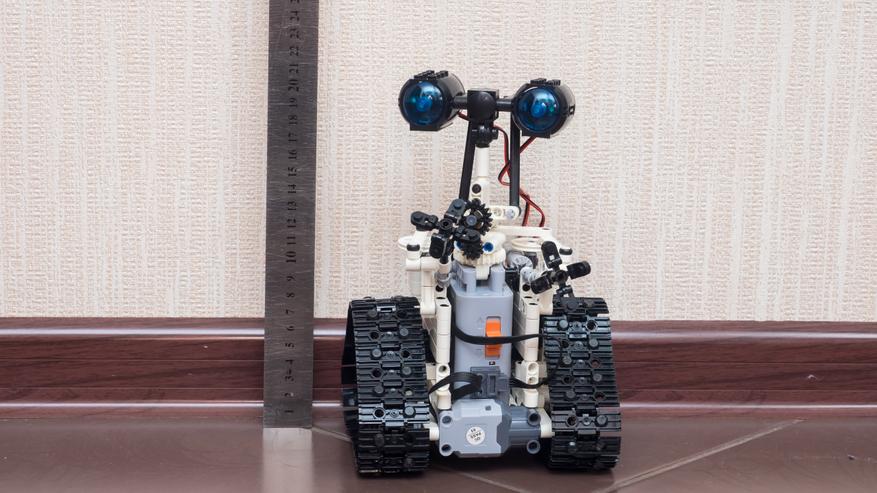
Во время летних каникул — нужно занимать детей какими-то интересными и желательно развивающими делами. Тем более, что в 2020 году много поездок к морю отменилось из-за карантина. Lego и подобные ему конструкторы — отличный выбор. Несколько смущает только стоимость оригинальных наборов — но на помощь приходит Aliexpress. В этом небольшом обзорео я расскажу про неплохой вариант набора для строительства робота WALL-E из более чем 400 деталей, который умеет ездить и управляется радиопультом.
Содержание
Купил на Aliexpress — цена на момент публикации $28.87
Поставка
Ехала посылка весьма долго, правда это было в самый разгар весеннего карантина. В конце концов я получил на почте довольно объемный сверток. Коробки для конструктора не было — все было упаковано в пузырьковую пленку. Если для себя — то без разницы, но для подарка — надо иметь в виду.
Под пленкой обнаружился простой пакет, в котором и был сложен конструктор. Детали разложены и запаяны в кульки поменьше, хоть не все вперемешку, это облегчает поиск нужной детали
Отдельно упакованы пульт управления и основной блок, в который нужно устанавливать элементы питания. Их кстати в комплекте нет. Перед сборкой робота — рекомендую найти какую-то коробку, желательно с перегородками, и разложить в нее детали из пакетиков.
Инструкция — мультиязычная, присутствует даже русский, но по факту — для самой сборки это не имеет значения. Каждый шаг подробнейшим образом проиллюстрирован — сколько и каких деталей нужно, в какой последовательности и в каком направлении их соединять.
В описании не забыли указать и как будут двигаться части робота после сборки, нагляднее посмотрим в конце — видеоверсию обзора. Имеется в инструкции и перечень всех комплектных деталей, забегая вперед — скажу, что их хватило, одна даже оказалась лишней, хотя все делалось строго по инструкции.
Сборка
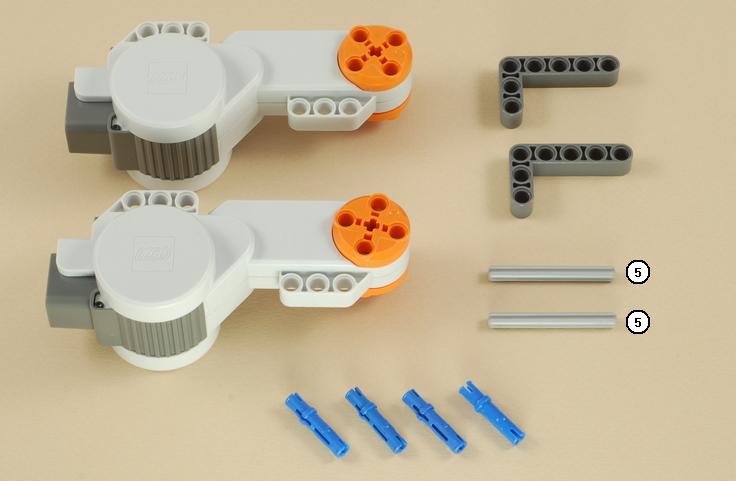
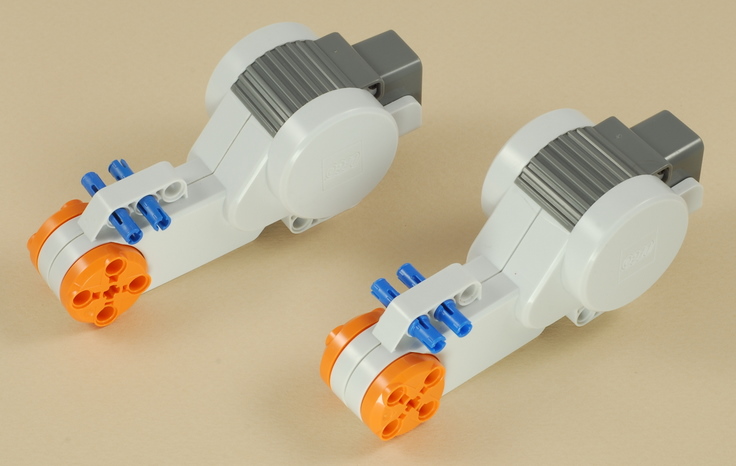
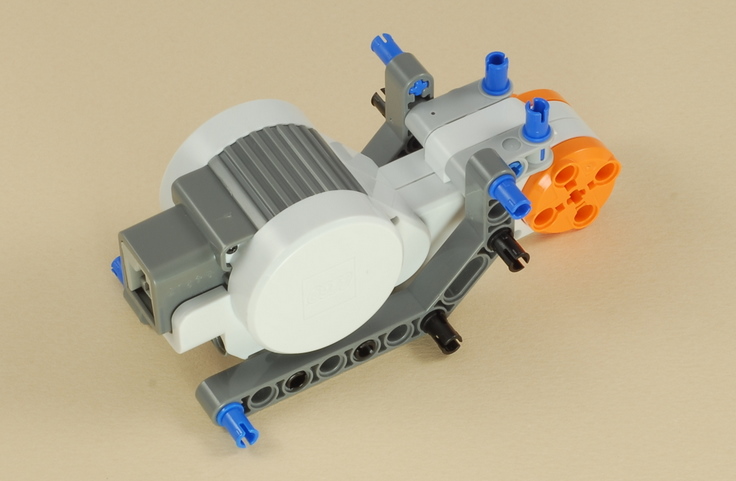
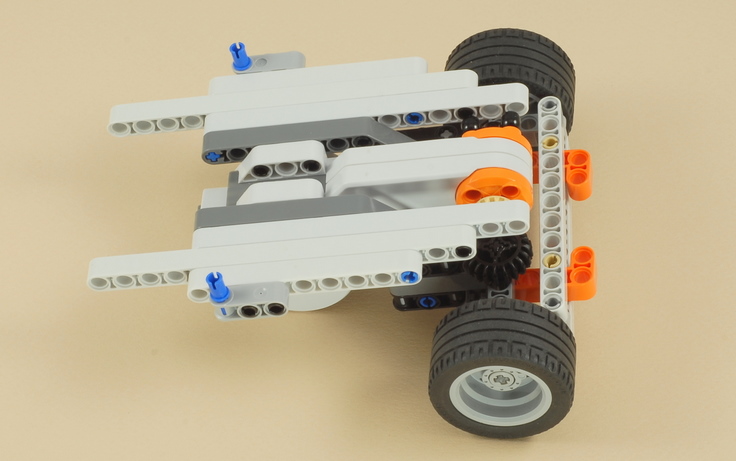
Сборка начинается с рамы на которую устанавливаются двигатели. Их два — по одному на каждую гусеницу робота. Продолжаем строить каркас будущего робота, вверх от двигателей идут зубчатые передачи для управления руками и глазами
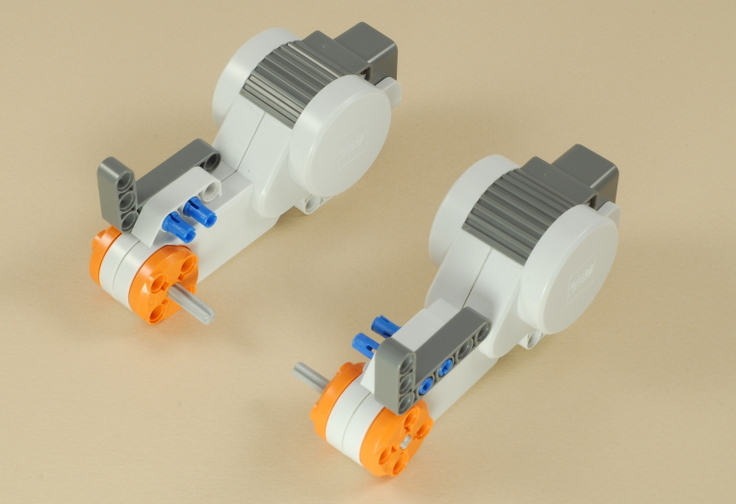
Кабели от двигателей, заканчивающиеся контактными площадками, закрепляются на задней части робота. Процесс сборки полностью забирает внимание ребенка — тут главное не торопится и делать все внимательно, все тщательно проверять.
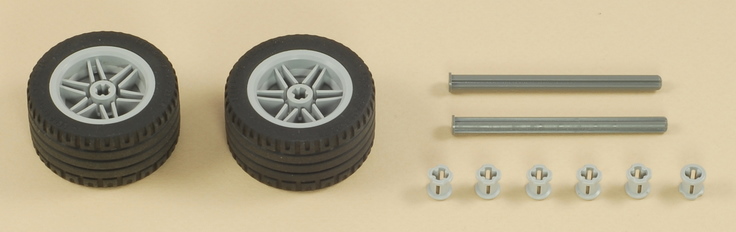
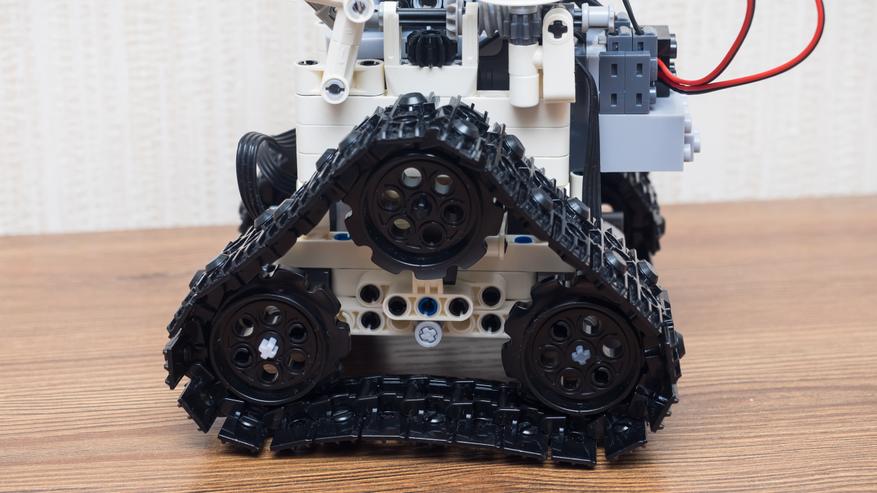
Наконец появляются руки робота, они будут вращаться когда робот будет ездить. Колеса на которые будут устанавливаться гусеницы. Двигатели крутят по одному колесу на каждую сторону
Сборка гусениц, каждый элемент — отдельно, всего их 52, по 26 на каждую гусеницу. Защелки довольно тугие, мне пришлось почти полностью делать их самому. Перед тем как соединить гусеницу в кольцо, ее нужно установить на колеса и защелкнуть уже на весу.
Ее удерживают три колеса, зубцы которых попадают в пазы проходящие в внутренней части гусеницы. Держится все надежно, не спадает.
Переходим к центральному модулю. В него устанавливается 6 батареек типоразмера АА, по три в каждую из сторон. А вот для пульта дистанционного управления — понадобятся батарейки поменьше — ААА. В комплекте они не идут, нужно приобрести отдельно.
Результат
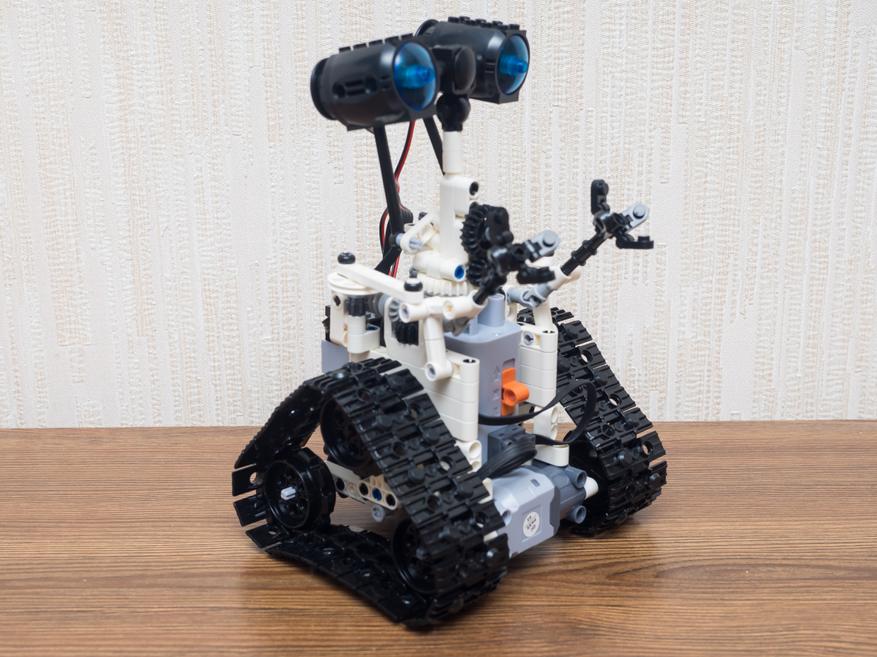
Последними устанавливаем — глаза робота. В каждом глазе находится светодиод. Выключатель питания находится на «груди» робота.
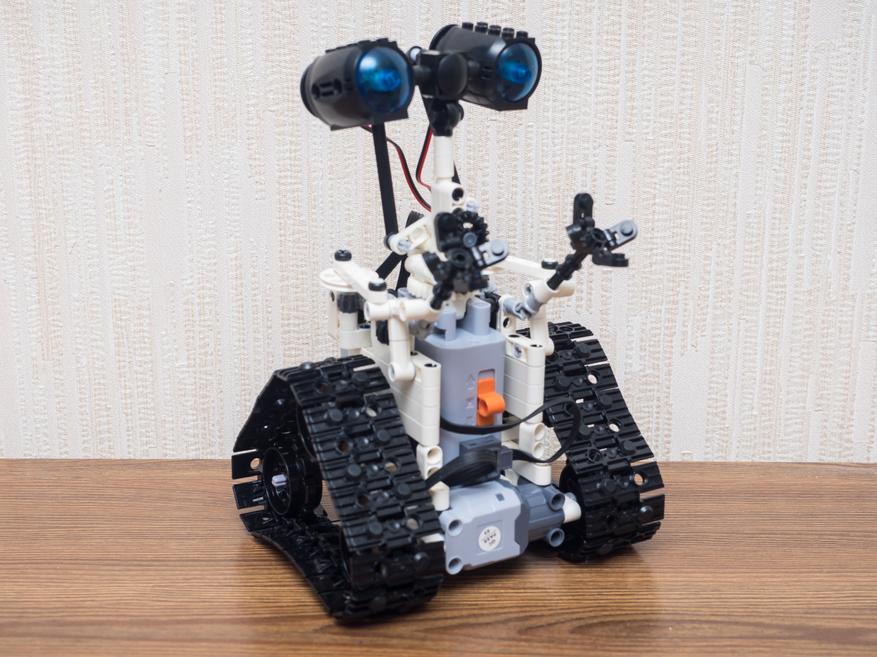
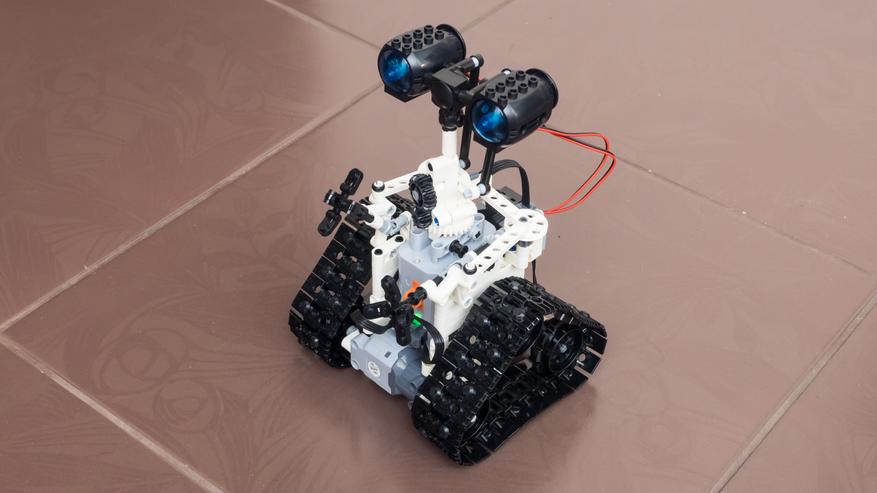
Глаза будут светится и двигаться когда робот ездит. Также при езде вращаются его «руки». Все это ложится на плечи двух ходовых двигателей робота — через систему передач.
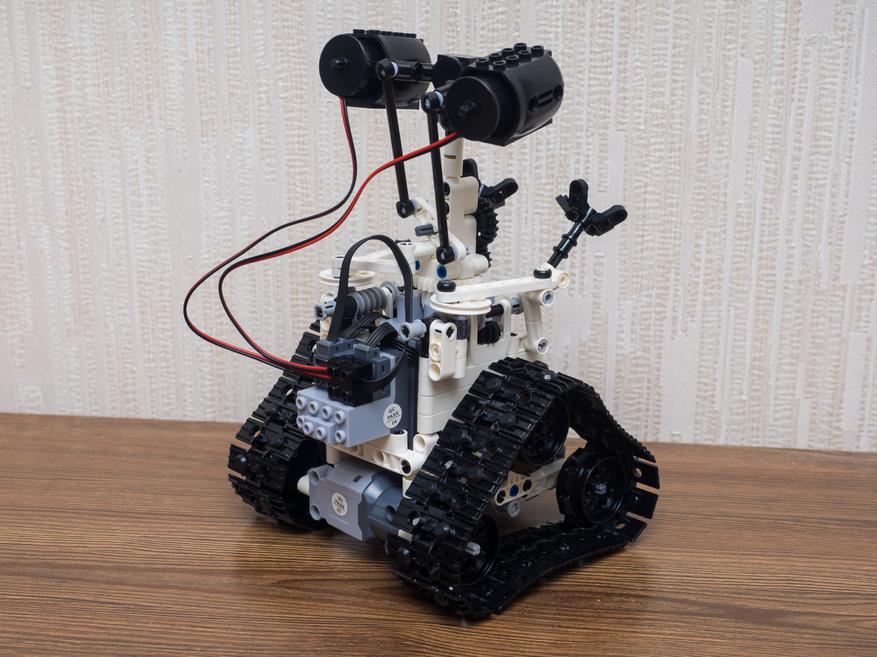
Вид сзади — многовато проводов конечно, но при желании их можно попробовать закрепить аккуратнее.
Высота собранного робота — чуть более 22 см. Достаточно крупный, отлично выполняет роль игрушки на радиоуправлении.
После машинок на радиоуправлении — к особенностям робота нужно привыкать, так как каждая гусеница управляется отдельным джойстиком на пульте. Принцип как у трактора. Джойстики можно реверсировать — как кому удобнее. Ездит робот довольно шустро, лучше по гладким поверхностям — плитке или ламинату, по коврам — тяжелее.
Видео версия
В целом за свою стоимость — отличный развивающий конструктор, и интересная игрушка, покупкой я доволен. В этом магазине есть и другие подобные наборы, не исключаю покупку еще какого нибудь.

Есть два различных способа использования удаленного пульта дистанционного управления:
1. Как беспроводной Bluetooth пульт дистанционного управления с другим проектом NXT. Используйте программу Dial_Remote_BT для удаленного пульта дистанционного управления, а также программу Dial_BT_Robot на роботе NXT, которым Вы хотите управлять. Затем необходимо установить Bluetooth-соединение между двумя блоками NXT. См. ниже инструкции.

2. Скачайте программу Dial_BT_Robot на робот NXT, которым Вы хотите управлять (например, "Погрузчик"), но пока её не запускайте!
3. Скачайте программу Dial_Remote_BT удаленного пульта дистанционного управления, но пока её не запускайте!
4. Установите Bluetooth соединение удаленного доступа удаленного блока NXT с регулируемым блоком NXT. Обратитесь к Руководство пользователя если что то не получается:
- Убедитесь, что Bluetooth включен на блоках NXT в Bluetooth меню (основное меню блока NXT);
- На блоке NXT для удаленного пульта дистанционного управления перейдите в меню Bluetooth, а если связь между блоками устанавливается не в первый раз, то выберите "Поиск". Выберите контакты, если они связаны прежде;
- Выберите название блока NXT для управляемого робота из списка подключения;
- Подключение с использованием порта связи № 1;
- Можно, конечно, придумать новый ключ для связи, но мы рекомендуем принять ключ по умолчанию 1234 на двух блоках NXT;
- NXT связаны, когда они оба отображают алмаз в левом верхнем углу экрана рядом со значком Bluetooth;
6. Запустите программу Dial_BT_Robot на блоке NXT робота, которого Вы контролируете.
7. "Погрузчик" и подобные проекты будут работать следующим образом:
Использование в качестве проводного пульта дистанционного управления
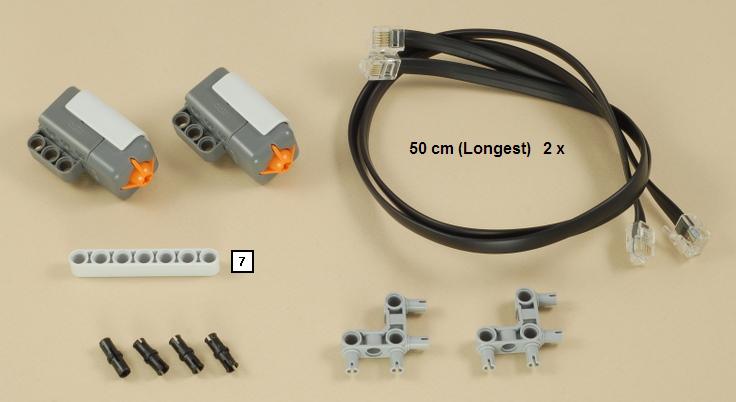
1. Используйте два длинных провода для подключения в порт А и В двух двигателей автомобиля без другого блока NXT (таких, как минировер) или аналогичное творение.
2. Запустите программу Dial_Remote_AB.

3. Мини Rover и подобные проекты будут работать следующим образом:
Сделайте несколько задач для "Погрузчика" и других транспортных средств, для того чтобы понять, чем можно управлять с помощью этого пульта дистанционного управления.
Попробуйте использовать дистанционное управление другими роботами-автомобиля.
Создай свой собственный робот для использования с удаленным пультом дистанционного управления (Bluetooth или проводной).
Попробуйте изменить программы, приведенные выше, чтобы сделать пульт дистанционного управления лучше для вашей собственной конструкции робота. Возможно, изменится направление движения роботов или скорость и т.д.
Роботы с Аниме » Мультяшные роботы

Скачайте и установите вот эту NXT-G программу.
Эта программа для удаленного управления обеспечивает возожность отправки по Bluetooth команд с пульта дистанционного управления к другому блоку NXT. Программа приема команд должна быть запущена на другом блоке NXT для интерпретации Bluetooth команд и реагирования на эти команды. Например, смотрите программу из проекта гоночного автомобиля. Инструкции по использованию удаленного управления гоночным автомобилем описаны ниже.
Программа посылает три разных вида Bluetooth команд другому блоку NXT:
-
А. Убедитесь, что Bluetooth включен в Bluetooth меню (основном меню NXT);
Б. С NXT для дистанционного управления, перейдите к меню Bluetooth, а если это в первый раз эти два NXTs были связаны, выберите Поиск. Выберите контакты, если они связаны прежде;
В. Выберите название NXT для Race Car из списка и подключения.
Г. Подключение с использованием связи № 1
Д. Введите ключ доступа, вы можете принять ключ по умолчанию 1234 на обоих NXT блоках
Е. NXTs связаны, когда они оба отображения алмаз возле значка Bluetooth в верхнем левом углу экрана.
4. Запустите программу SteerRemote на пульте дистанционного управления NXT.
5. Запустите программу SteerBTCar на блоке NXT гоночного автомобиля.
6. Гоночный автомобиль будет работать с пульта дистанционного управления следующим образом:
* Нажмите и отпустите кнопку со стрелкой влево, чтобы уменьшить мощность привода (скорость) на 20%, и кнопку со стрелкой вправо, чтобы увеличить скорость на 20%. Нынешний уровень мощности отображается на блоке NXT гоночного автомобиля (а не на удаленном блоке NXT).
* Нажмите и отпустите кнопку ввода для переключения к заднему ходу автомобиля (один раз, чтобы автомобиль двигался назад и снова вернуться чтобы двигался вперёд). Когда в реверсном режиме, автомобиль будет ездить, то поворачивать он будет в обратном направлении.
Выберите другой робот-автомобиль, котрый Вы бы хотели контролировать с дистанционного пульта управления или создайте свой собственный механизм. Вам также потребуется написать Bluetooth управляющую программу для того, чтобы использовать свой проект.
* Попробуйте изменить базовую программу для дистанционного управления своим собственным уникальным роботом. Например, Вы можете изменить поведение кнопки NXT "нажатие" на "нажатие и удерживание", или, возможно, добавить обратную связь на дисплее.
* Можете ли Вы изменить пульт дистанционного управления для управления не автомобилем, а допустим каким то сложным механизмом?
Астробой Мультфильм » Мультяшные роботы
Согласно актуальной статистике конструкторы LEGO пользуются рекордной популярностью не только у детей, но и у представителей других возрастных категорий. Благодаря многообразию, продуманности и универсальности деталей, проработанных до мелочей, не возникает проблем с тем, как можно сделать робота из LEGO. Важно, что собрать простую модель легко сможет даже маленький ребенок, создав своими руками удивительную игрушку, и такой робот будет намного интереснее, чем неразбираемый.
Но, как показывает практика, данный процесс строительства конструкций по различным схемам выглядит привлекательным и для взрослых.

Как построить маленькую модель?
Сделать мини-робота, который будет маленьким, но при этом достаточно «удаленьким», очень просто. Для такой поделки можно использовать имеющиеся в наличии детали легендарного конструктора. В принципе результат будет определяться исключительно воображением самого создателя компактного образца фантастической робототехники. При этом сам процесс постройки небольшого робота является максимально простым и включает в себя несколько этапов.

В первую очередь необходимо будет сделать ноги будущего мини-робота. Для этого потребуется:
взять две одинаковых детали, которые внешне похожи на ступни;
прикрепить к каждой из них высокий куб;
выделить коленные узлы;
установить маленькие квадраты.
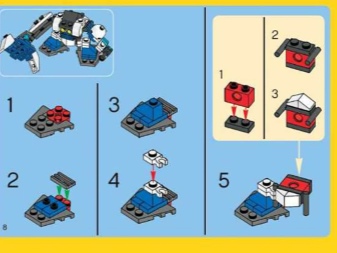
В качестве примера можно привести следующие схемы.
На ноги необходимо будет установить туловище робота-малыша. Если имеется в наличии гнущаяся деталь LEGO, то изначально устанавливают именно ее.
Следующий этап – это непосредственно формирование туловища конструкции. Здесь важно заметить, что торс должен быть массивным, даже с учетом компактности создаваемой модели.
По желанию можно установить решетки, а также заглушки разных цветов.
Схематически процесс создания туловища и его установка продемонстрированы на рисунках.
Теперь можно приступать к рукам будущей игрушки. Верхние конечности очень удобно делать из сопряженных цилиндров. Завершающими элементами при этом могут стать конусы. Здесь главное – не забыть установить хватающие элементы, то есть кисти. Стоит напомнить, что такие детали присутствуют во многих наборах LEGO. С другой стороны, можно обойтись и без данного пункта, но в таком случае не получится вооружить робота.
Все рассмотренные манипуляции, связанные с формированием рук, отображены наглядно на схемах.
На завершающей стадии останется сделать роботу голову. Ее роль здесь может сыграть обычный кубик, сформированный из двух квадратов. Как интересный вариант, можно по центру конструкции установить голову человечка, если таковая есть в распоряжении.
Кстати, возле головы робота нередко размещают колеса и прочие дополнительные элементы.

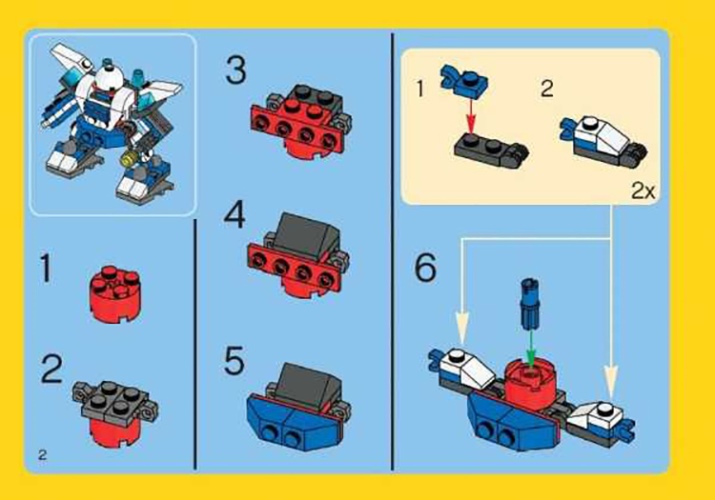
Создание большого робота
Может показаться, что создание большой по размерам модели робота окажется сложнее описанного выше процесса. Однако это не совсем соответствует действительности. Здесь, опять же, важно учесть, что постройка роботов, независимо от их габаритов, конфигурации и назначения, – это очень увлекательное занятие, и чаще всего не только для детей.

В принципе такую игрушку вполне можно сделать, используя уже рассмотренную схему, просто задействовав большее число компонентов. С другой стороны, подключив фантазию и воображение, создают самых необычных крупногабаритных роботов. Кстати, в такой ситуации наиболее правильным решением будет доверить проектирование именно юному конструктору.

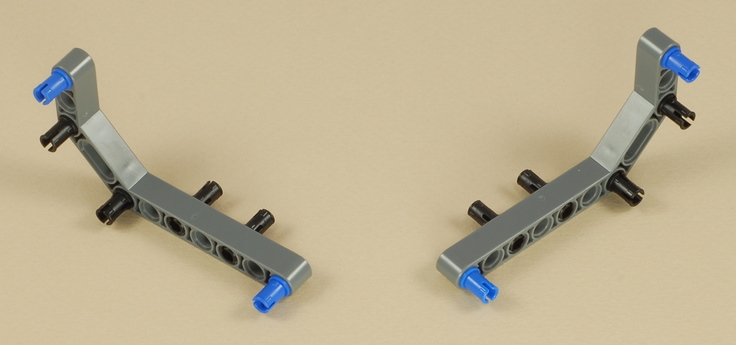
Как в ситуации с мини-роботом, здесь следует начинать сборку с нижних конечностей. Для формирования ног понадобятся деталь в виде куба с крепежными элементами на каждой стороне, а также 3 круглые серые заглушки и синий квадрат. Важно, чтобы последний был на лицевой стороне срезан. Здесь имеется в виду гладкая поверхность, расположенная под углом 45 градусов.
Все перечисленные детали следует разместить по бокам кубика, как это показано на рисунке.
Дальнейшим алгоритм действий выглядит следующим образом.
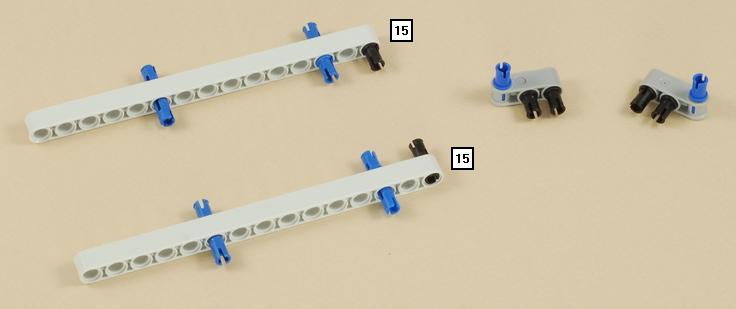
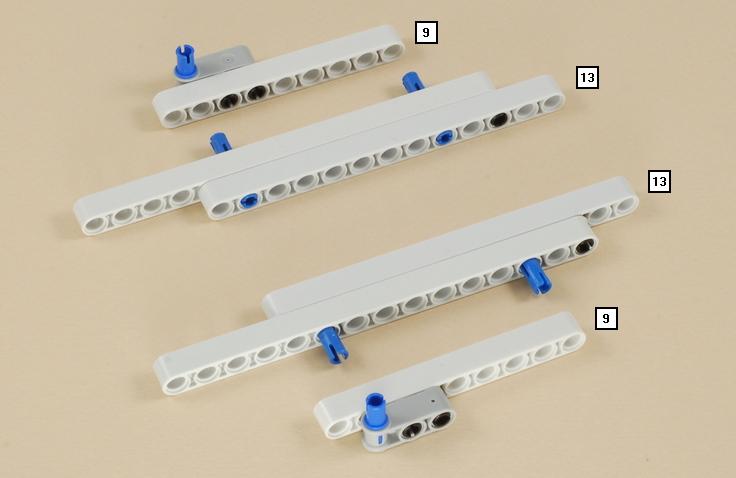
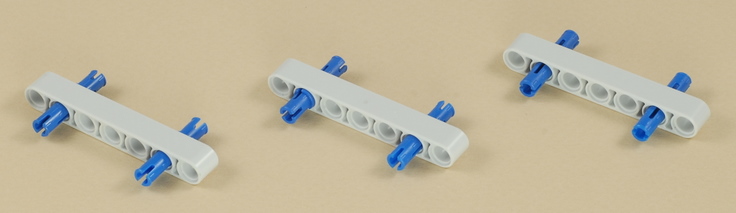
По бокам устанавливают по одной заглушке, после чего необходимо будет подобрать две скругленные и вытянутые детали, у которых будет по два отверстия и сквозные крепежные элементы на концах. Их соединяют и крепят к установленным ранее заглушкам. Кстати, здесь расположенные сверху отверстия можно заглушить. В итоге могут потребоваться 4 заглушки.
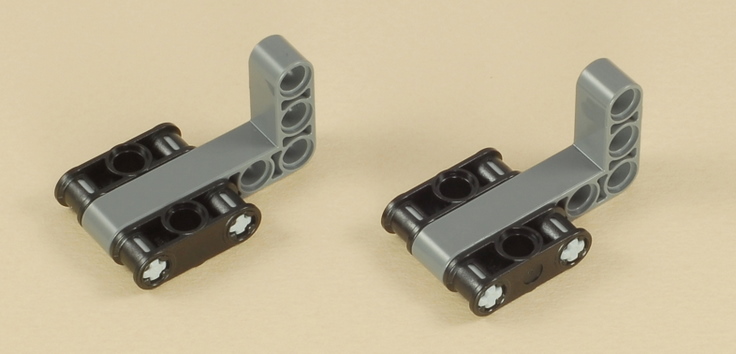
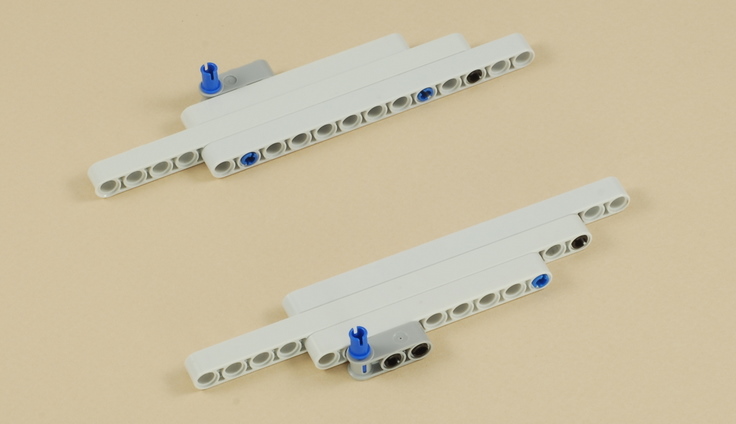
В сквозное отверстие собранного элемента вставляют длинный шток, соединяя эту деталь с цилиндром. Остается на конец штока установить круглую заглушку.
Перемещаясь ниже, монтируемую ногу продолжают серым кубиком. Важно, чтобы у него снизу лицевой плоскости имелось крепление.
Ставят квадрат, имеющий на конце круг. Параллельно в качестве еще одного фиксатора монтируются еще один квадрат, а также деталь с треугольной лицевой стороной. В данном случае имеется в виду срезанный под углом 45 градусов квадратик.
Посредством установленного круглого крепления монтируют конструктивный элемент, состоящий из двух кубиков.
Добавляют снизу еще одну пластину, которая обеспечит максимальную устойчивость.
Весь описанный процесс сборки продемонстрирован на рисунке.
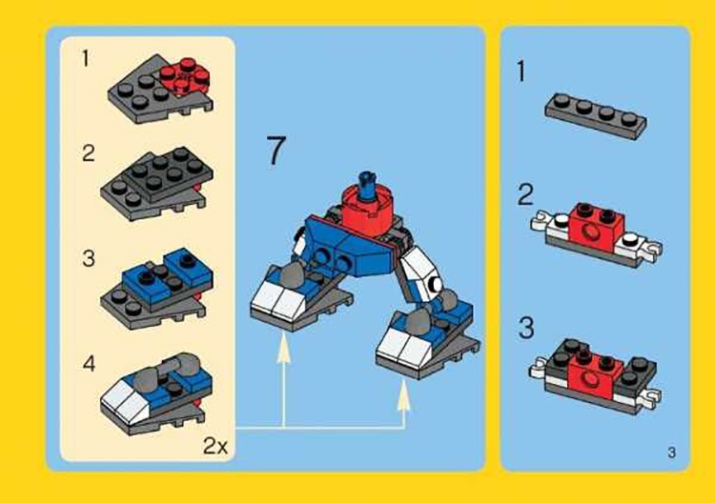
Следующий этап строительства большого робота – это создание его туловища. Эта процедура состоит из следующих действий.
Над собранными ранее ногами робота устанавливается деталь в виде круга с четырьмя квадратами.
В центре этого круга располагается пластина из двух квадратных элементов.
По бокам выстраиваются высокие кубики, между которыми необходимо установить один куб с дополнительным креплением или же отверстием на лицевой стороне.
Выкладываются по двум флангам элементы, сформированные из двух квадратов.
Сверху ставят еще одну круглую деталь.
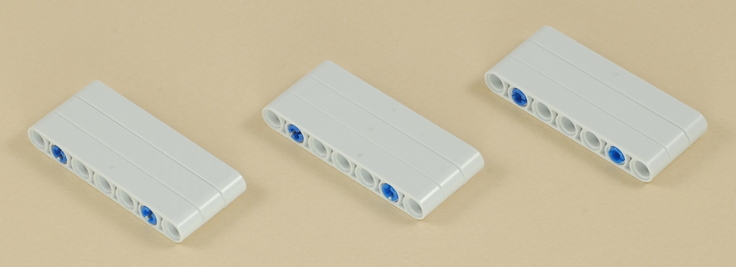
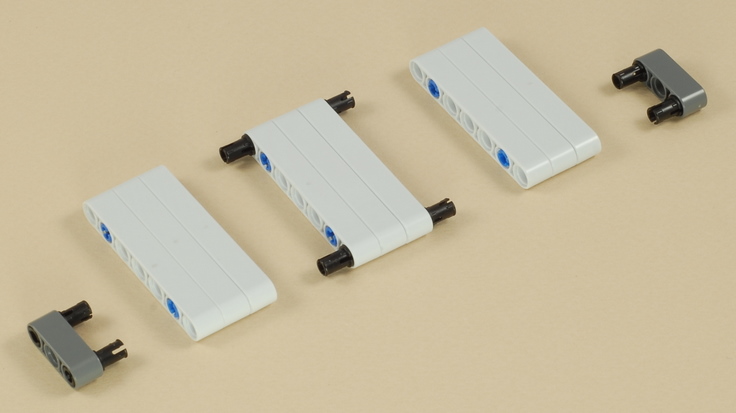
На ней крепится массивная пластина, составленная из 6 квадратных деталей, а с тыльной стороны надо будет установить 2 квадрата с ручкой. Речь идет о том, что задняя часть должна оказаться немного выступающей за габариты всей конструкции. А вот под нее ставят элемент, имеющий трапециевидную форму, срезанный на конце. Важно, чтобы его вершина оказалась расположенной по направлению вниз.
На противоположной стороне устанавливается аналогичная деталь.
В центре помещается один круг, который закрывается элементом серого цвета, имеющим соответствующий размер.
Крепятся срезанные серые кубы так, чтобы острые края были направлены вверх.
Как правильно собрать туловище, показано здесь.
Теперь можно перейти к созданию верхних конечностей игрушки. Наглядно данный процесс можно увидеть на рисунке.
Как в ситуации с остальными частями создаваемой конструкции, сборка рук тоже не вызовет каких-либо трудностей. И здесь, опять же, все будет зависеть от фантазии юного или же более взрослого автора проекта. Сам же процесс включает в себя следующие шаги.
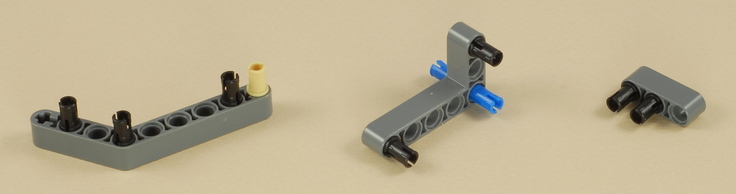
Берут элемент в виде небольшой полосы на два крепления.
Сверху монтируют квадрат с хватательным элементом, который будет выполнять функции кисти робота.
Устанавливают маленькую деталь с заглушенным концом.
Как показано на рисунке выше, делают конструкцию в двух экземплярах.

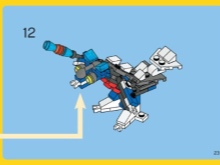
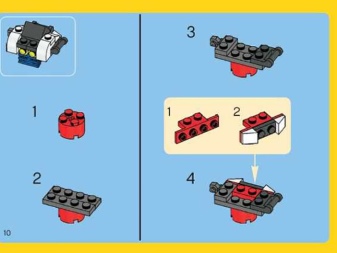
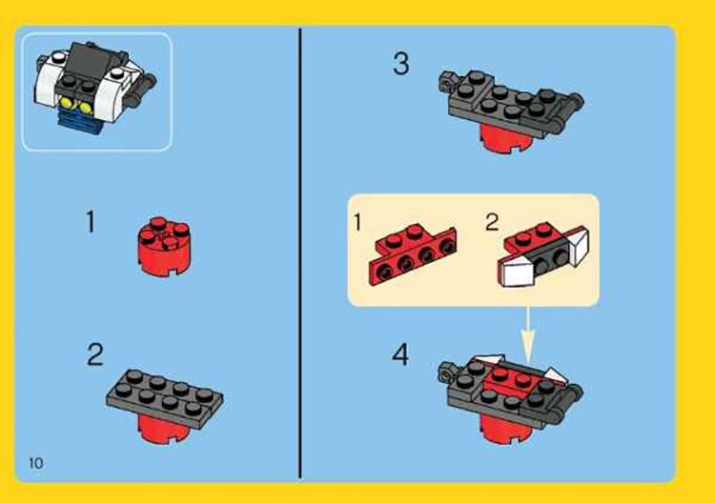
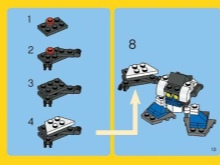
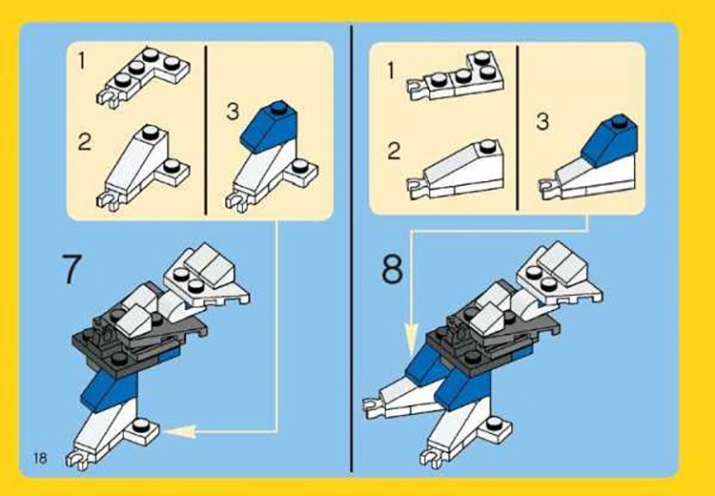
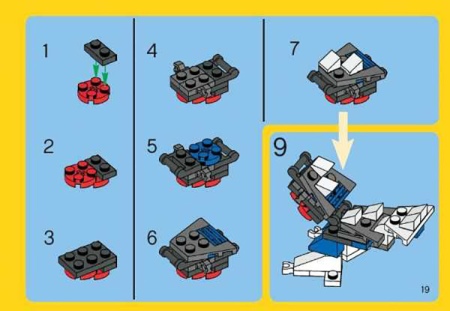
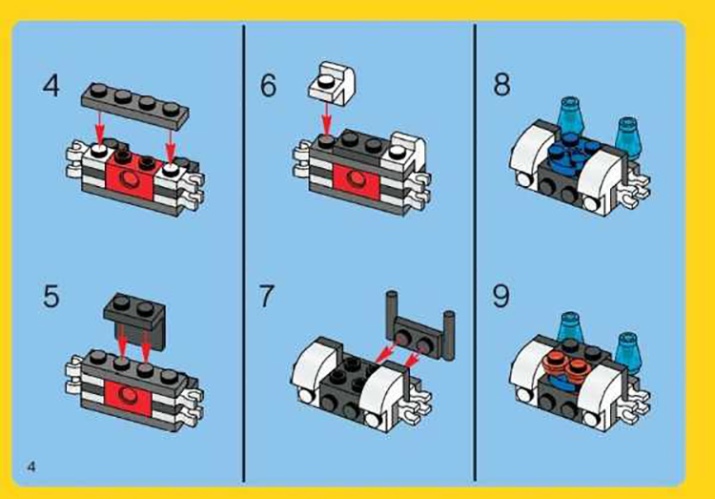
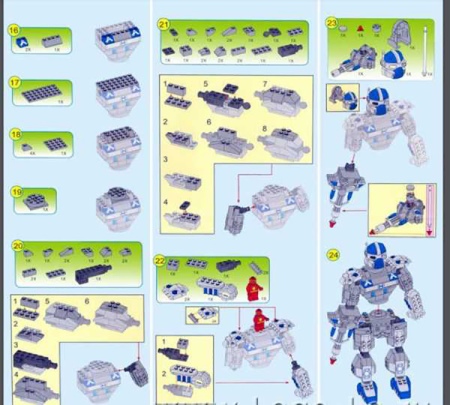
Сборка боевого робота
Главное отличие такого образца техники, пусть и игрушечного, заключается в способности эффективно защищаться от нападений и атаковать самому. Как правило, с вооружением такого бойца проблем не возникает, поскольку во многих наборах его хватает. Для создания военной модели робота потребуются:
белый или прозрачный срезанный треугольником кубик – 1;
одинарные квадраты белого цвета – 2 (важно, чтобы один из них имел ровную верхнюю плоскость);
высокие кубы (одинарные) – 2;
сдвоенные кубы – 3;
высокие цилиндры – 2;
«краники» – 4 (по 2 серых и черных);
усеченные конусы – 2;
одинарные кубы, имеющие так называемые захватки – 2;
черные скругленные «квадраты» – 2;
кубы со срезанными (треугольными) верхами серого цвета – 2;
плоский сдвоенный куб серого цвета – 1;
кубы с пятью креплениями черного цвета – 3.

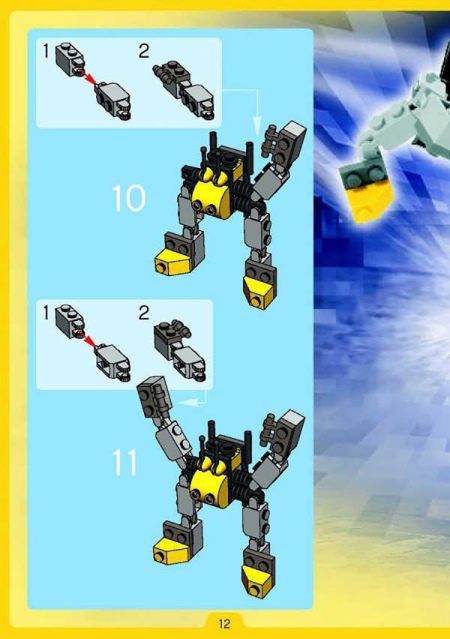
Подготовив все необходимое, можно приступать к самой сборке боевого робота. Первым делом концентрируются на формировании головы, постепенно переходя к туловищу.
Порядок действий будет следующим.
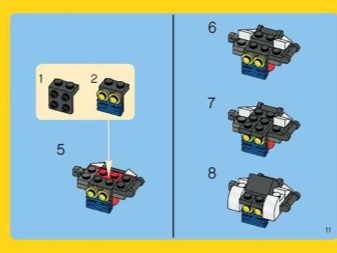
Взять два высоких кубика, имеющих со всех сторон крепления. Важно соединять детали с боков, а не ставить их друг на друга. Низ одного куба должен сочленяться не с верхом, а с боковой стороной второго.
На боковые крепления верхнего куба установить «круглые квадраты». Подобным образом формируются плечи будущего робота. Можно, конечно же, использовать детали обычной (квадратной) формы, но в таком случае руки модели не будут поворотными.
Добавить к плечам захваты.
Рассмотренные этапы сборки отображены наглядно на рисунках.

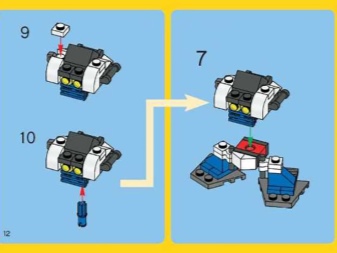
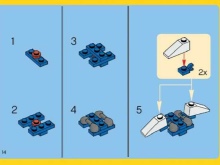
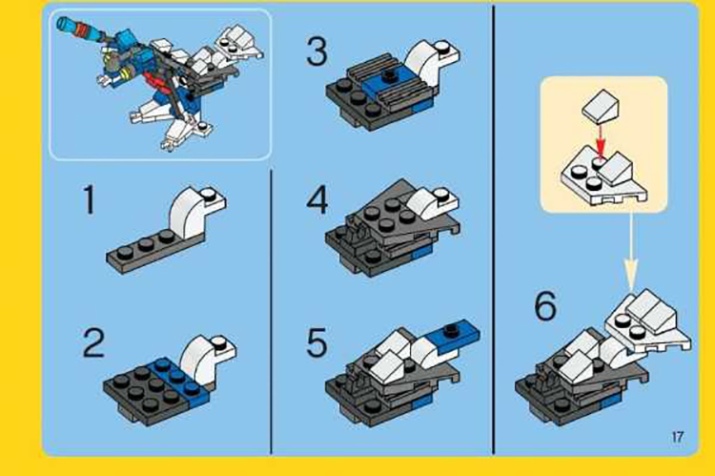
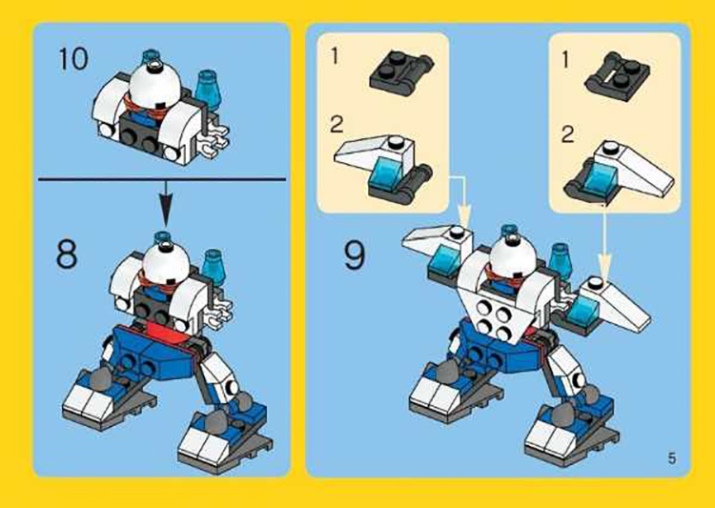
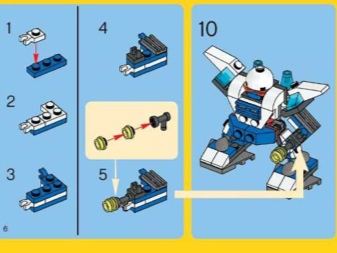
Следующая стадия – сборка ног, которые также можно сделать двигающимися в «суставах». Все необходимые детали соединяются так, как это продемонстрировано на рисунке.
После останется только прикрепить стопы, которыми станут кубы со срезанными концами.
Схема сборки ног боевого робота выглядит следующим образом.

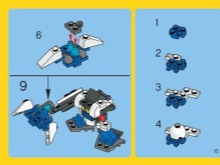
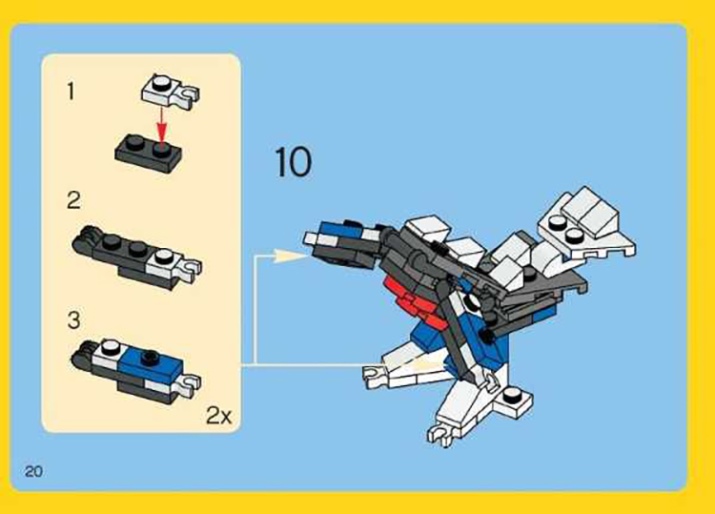
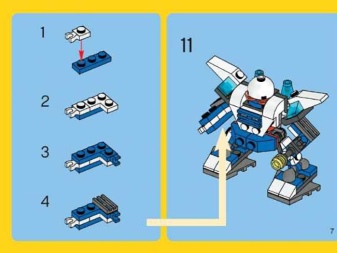
Теперь самое время вернуться к созданию верхних конечностей будущей игрушки. Именно в них будет размещаться вся огневая мощь этой боевой машины. Само оружие можно сформировать из прямоугольных элементов.
Завершающий этап строительства настоящей боевой машины.
Подводя итог, стоит заметить, что рекомендуется верхние, вооруженные «до зубов» конечности игрушки развести в стороны. Это минимизирует риск того, что руки могут сломаться или же будут мешать. На этом создание самодельного боевого робота можно считать завершенным.
Другие идеи
Здесь стоит рассмотреть, как быстро построить простейший вариант робота из «кирпичиков» LEGO. Такая модель станет оптимальным решением создания игрушки, когда у ребенка ограниченный ассортимент деталей. Как было отмечено, все элементы этих легендарных конструкторов имеют определенное предназначение.
При постройке простого робота можно подбирать детали одного цвета или схожих оттенков. Однако можно создать и креативную модель.

Первоначальный этап сборки предусматривает формирование туловища и выглядит следующим образом.
Подобрать элемент из двух блоков по четыре кубика в каждом. Сзади прикрепить два высоких кубика, то есть имеющих по два квадрата, а на фронтальной части установить деталь аналогичной высоты во всю длину конструкции. Важно, чтобы у последней крепеж был спереди и вверху.
На втором ярусе закрепить еще один высокий кубик (на один квадратик), а также аналогичный по высоте сдвоенный элемент и еще одиночный кубик. Следует помнить о наличии по бокам одинарных запчастей отверстий для рук.
На фронтальной стороне установить длинную деталь из четырех квадратов.
Поверх всей конструкции разместить две пластины.
Процесс постройки туловища.
После сборки торса переходят к нижним конечностям робота.
Взять фрагмент на три блока по два квадрата.
Закрепить три пластины, имеющие по одному креплению в центре. Эти детали должны расположиться под прямым углом к основе.
Подобрать для создания ступней детали на три секции (желательно, чтобы они отличались по цвету).
Сверху установить угловую деталь, которая рассчитана на два куба (верхняя часть первого срезана под 45 градусов). В результате должен получиться конструктивный элемент, напоминающий тапок.
За собранным фрагментом разместить квадрат, который позволит выровнять форму получившегося тапка.
На оставшемся свободным месте закрепить сдвоенный кубик другого цвета.
Сочленить нижние конечности с уже собранным ранее торсом.
Вот так схематически выглядит сборка ног робота.
Для создания рук робота потребуется:
в крепежные отверстия, расположенные по бокам, поместить круглые элементы, внешне напоминающие автомобильные фары;
прикрепить узкую деталь на четыре квадрата;
на сформированной основе установить черные квадраты, на концах которых должны находиться захваты.
Руки собирают по следующей схеме.
Следующий шаг в строительстве робота – это формирование его головы. Для этого поверх туловища устанавливается любая деталь, которая внешне будет похожа на соответствующий элемент собираемой конструкции. Подвижную голову делают из комплектующих с круглым (вращающимся) механизмом.
Создание головы отображено на этом рисунке.
На последнем этапе можно уделить внимание оформлению грудной клетки робота. Здесь можно использовать практически любые имеющиеся элементы. Это могут быть, к примеру, решетки и разноцветные заглушки, имитирующие кнопки. Так же эффектно будут смотреться плоские детали в виде пластин. По желанию создателя робота можно вооружить.
Завершение постройки простого робота.
Не секрет, что трансформеры покорили сердца широкой зрительской аудитории, и дети (актуально как для мальчиков, так и для многих юных представительниц прекрасного пола) не стали в данном случае исключением. Благодаря наборам LEGO у каждого поклонника этих роботов может появиться собственный и при этом самодельный Оптимус Прайм. Естественно, изначально необходимо будет позаботиться о наличии всех необходимых для сборки деталей. Кстати, этот процесс нередко увлекает всю семью. Ниже будет наглядно показано, как можно довольно быстро построить трансформера.
Начальная стадия создания популярного робота.

Сборка трансформера.
Для окончательного завершения всех работ необходимо просто поставить сделанного Оптимуса на ноги. Если необходимо будет трансформировать его в машину, то действуют по обратной схеме.
Естественно, рассмотренные выше варианты строительства роботов – это далеко не полный перечень возможностей, которые предоставляет любителям конструирования LEGO. И здесь уникальность моделей будет определяться не только габаритами и количеством использованных при сборке деталей. Имеется в виду создание механизированных и управляемых конструкций. В итоге нередко миниатюрный робот с интересными функциями произведет на ребенка и его родителей лучшее впечатление, чем его большой родственник.
Речь идет о том, что разработчик позаботился о доступности, помимо стандартных деталей, таких элементов, как контроллеры, различные датчики, моторчики и специальное программное обеспечение.


Примеры самоделок роботов из Lego можно найти в следующем видео.
Читайте также: