
Как сделать камеру видеонаблюдения из лего
Обновлено: 08.05.2024

Если вы выбирали камеру для робота, то наверняка слышали о Pixy. Это популярная система машинного зрения для Arduino и Raspberry Pi. А теперь и для Lego Mindstorms. 30 сентября Charmed Labs анонсировала новую версию продукта.
Видеокамера Pixy производства Charmed Labs предоставляет простую возможность реализации элементов машинного зрения. Тысячи камер были проданы по всему миру после успешно проведенной компании на Kickstarter в начале 2014 года.
В отличие от большинства камер, Pixy выполняет обработку изображения на своем борту, освобождая мощности микроконтроллера для других задач. Вы можете быстро «научить» Pixy обнаруживать новые объекты почти также просто, как считать сигнал нажатия кнопки. Встроенные в его прошивку алгоритмы способны обнаруживать и отслеживать сотни объектов одновременно.
Стандартная версия Pixy поддерживает многие микроконтроллеры, в том числе популярную платформу Arduino, а также одноплатные компьютеры Raspberry Pi и BeagleBone Black.
Новая видеокамера Pixy LEGO подключается напрямую к контроллеру Lego Mindstorms NXT или EV3 с помощью прилагаемого кабеля и интегрируется в программную среду Lego.
Вы часто хотите, чтобы ваш легоробот догнал мяч или подобрал объект. Но это очень трудно реализовать без правильного датчика. Pixy дает роботу возможность выполнения этих видов задач, потому что видит объекты в окружающей среде,
— говорит президент Charmed Labs Рич Легранд.
Теперь интеграция камеры Pixy с Lego стала проста. Порядок установки описан на wiki-странице проекта. Р анее, чтобы «подружить» легоробота с Pixi CMUcam5, необходимо было преодолеть сложности, в том числе был необходим адаптер UART.
Charmed Labs — небольшая компания, расположенная в городе Остин штата Техас (США), специализирующаяся на предоставлении передовых встраиваемых решений для образовательных целей.

Мне очень нравится конструктор Lego, фотоаппараты и программирование. Я решил совместить три этих своих увлечения и собрать автоматическую плёночную фотокамеру из Lego. Мне хотелось, чтобы камера всё делала сама: от пользователя требовалось лишь вставить плёнку, навести на цель и нажать кнопку.
В этом посте я бы хотел рассказать о том, как я делал автоматическую камеру из Lego, как её программировал и что из этого получилось.
Камера обскура
Я начал с самого начала, с камеры-обскуры. Это основа любого фотоаппарата: через дырочку на плёнку (или сенсор) попадает свет и оставляет там изображение. Я решил сделать дырочку в кусочке фольги. С помощью одного из мини-свёрел я проделал отверстие диаметром где-то 0,3 мм.

Теперь надо было собрать светонепроницаемую камеру, в которой будет находиться плёнка. Мне очень помогли калькуляторы с сайта Mr. Pinhole. Они позволили рассчитать оптимальные размеры камеры. Всё очень просто: при размере дырочки в 0,3 мм, расстояние от дырочки до плёнки должно быть где-то 60мм.

Принцип работы очень простой: пользователь вставляет новую кассету с плёнкой, плёнка тут же перематывается на свободную катушку. С каждым новым кадром плёнка наматывается обратно в кассету. Когда все кадры отщёлканы надо лишь достать использованную кассету. Вот пара снимков процесса сборки:


Мне хотелось, чтобы камера-обскура предоставляла три интерфейса: контроль основной катушки (которую пользователь поставил), контроль свободной катушки (куда плёнка отматывается) и управление задвижкой. Это выглядит так:

В дальнейшем моторчики модуля автоматизации будут крутить эти три шестерёнки. А пока, мне надо было удостоверится, что камера не пропускает свет. Я потащил свою конструкцию в фотолабораторию. Я решил использовать фотобумагу для поиска световых пробоин. Фотобумага чувствительна к свету: там, где попал свет, появляется чёрное пятно. Я напихал в свою камеру-обскуру фотобумаги, вынес на свет, подождал несколько минут и проявил бумагу. Вся поверхность была покрыта чёрными шрамами. Мне потребовалось несколько часов, чтобы найти все пробоины и замотать их изолентой. Вот что получилось:


Камера-обскура была закончена. Честно говоря, очень многие любители сами собирали подобные приспособления. Так что пока я находился на относительно протоптанной тропе. Однако, я не нашел ни одного любительского проекта, который пошел дальше и решил автоматизировать свою камеру.
Автоматизация
Кирпичики Lego были у меня и в детстве. Однако набор Lego Mindstorms я купил лишь недавно. Набор содержит три мотора, пару кнопок, датчик света и программируемый модуль. Всё, что надо для современной камеры.
Модуль автоматизации должен содержать три мотора – два для управления перемоткой и один для контроля задвижки, – кнопку спуска, датчик освещённости и датчик, определяющий, вставлена ли камера-обскура. Последний датчик довольно важен: именно он определяет момент, когда камера только вставлена и надо отматывать плёнку. Должно было получиться что-то такое:

Постоянно не хватало специфических деталей. На выручку пришел сайт BrickLink. На нём я нашел абсолютно все детали и смог купить их через PayPal. Надо сказать, что цены были очень разумные. Вскоре модуль автоматизации был собран. Камера-обскура аккуратно вставлялась в модуль автоматизации:


Железо, точнее, пластмасса была готова. Осталось лишь это дело запрограммировать.
Программируемый модуль (контроллер) управляется операционной системой от Lego. Модуль можно программировать в визуальной среде разработки: таскать кирпичики-операторы, составлять блоки-циклы и т. п. Мне эта гуйня очень не понравилась. Так что, первое, что я сделал – это перепрошил модуль системой Lejos. Программы для неё можно писать на несколько урезанной джаве. То, что надо для нашего приключения.
Программа содержит несколько любопытных фич:
Логика вычисления угла перемотки плёки
Плёнку оказалось перематывать куда сложнее, чем мне казалось сначала. Катушки с плёнкой очень похожи на спираль. То есть, угол на который надо повернуть катушку, чтобы намотать 40мм плёнки зависит от количества уже намотанной плёнки. Чтобы сделать расчёт пришлось использовать уравнение аж второго порядка. Такое не каждый день кодишь. Кому интересно посмотреть – логика в файле FilmTransportUtils.
Вычисление скорости задвижки
И тут ждала западня: сенсор лего возвращает уровень освещённости числом от 0 до 1023. Мне не удалось узнать, как это число соотносится с какими-либо физическими величинами. Так что пришлось строить соответствие методом научного тыка. Я арендовал экспонометр и пошел гулять. Делал замер лего-сенсором, записывал показание, потом делал замер прибором. В результате получилась довольно сносная таблица соответствий. Мне кажется, что её можно уточнить, однако для беты сойдёт. Кому интересно посмотреть – добро пожаловать в ExposureUtils.
Интерфейс пользователя



Результат
Всё было готово. Вот видео с демонстрацией работы камеры:
А вот получившиеся фотографии. Гидрант:


Буду снимать на свою камеру и дальше: ведь это так просто, нажал кнопку – и готово!

С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Подготовка
Итак, давайте разбираться по порядку, что нам понадобится. Кроме самого набора LEGO MINDSTORMS Education EV3 (45544), нам нужна самая простая веб-камера с USB-подключением, не тяжёлая, которую вы сможете закрепить на роботе. Разрешение роли не играет, т.к. мощности EV3 всё равно не хватит на обработку больших изображений.
Чтобы EV3 смог работать с веб-камерой мы будем использовать альтернативную прошивку leJOS, вместо стандартной. О том, что такое leJOS, как подготовить загрузочную SD-карту и как программировать, используя leJOS, можете прочитать в статье «Программируем робота LEGO Mindstorms EV3 на Java». Обработку изображений, полученных с камеры, мы будем делать с помощью библиотеки компьютерного зрения OpenCV, которая появилась в составе leJOS в версии 0.9.1, поэтому эту версию и будем использовать.
После того как вы подготовили модуль EV3 для работы с leJOS, желательно проверить работает ли веб-камера с EV3 с помощью простых примеров, которые вы можете найти в статье «Программируем робота LEGO Mindstorms EV3 на Java» в разделе «Использование веб-камеры в leJOS EV3 для захвата изображения». Если камера работает, можно идти дальше.
Конструкцию робота можете придумать свою или использовать моего «Исследователя EV3», главное, чтобы робот смог не только поворачивать камеру в сторону объекта, но и двигаться к нему или от него. Конструкцию поворачивающейся рамки, к которой крепится камера, измените в зависимости от формы вашей камеры. Мне удалось закрепить камеру только с помощью деталей конструктора, но вы можете использовать резинки, верёвки и другие приспособления. Главное, чтобы камера держалась на рамке прочно и не болталась. Кстати, как робот работает можно посмотреть на видео:
Вот инструкция для сборки «Исследователя EV3»:

Инструкция для сборки робота исследователя EV3 из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2: рамка закреплена прочнее и не отваливается.
После того как робот готов, можно переходить к программированию. Я сразу дам текст программы с комментариями, а ниже дам пояснения, как она работает и какие команды понимает.
Описание работы программы
После запуска программы, если всё в порядке, на экране появляются следующие надписи:
Первая строчка говорит о том, что камера готова. Следующая запись приглашает выбрать режим работы: нормальный или отладка. Следующие 2 строчки – подсказки. В этот момент программа ждёт вашего решения. Вы можете остановить программу, нажав Esc на модуле EV3 или нажать кнопку «вверх», чтобы выбрать нормальный режим, или кнопку «вниз» - для отладки.
Перед тем как выбрать режим подставьте к камере объект, который вы будете отслеживать. При этом старайтесь, чтобы объект был освещён так же, как и при дальнейшем отслеживании. Это не обязательно должен быть шарик. Главное, чтобы объект был яркого насыщенного цвета. Лучше всего использовать синий или зелёный цвета.
Затем нажмите кнопку вниз или вверх, в зависимости от выбранного режима, и робот возьмёт пробу цвета. На самом деле проба берётся 7 раз с небольшим интервалом времени, и конечный цвет будет вычислен как среднее арифметическое от этих 7-ми проб. Это позволяет снизить зависимость от мерцаний и подстройки баланса белого. На экране появится надпись:
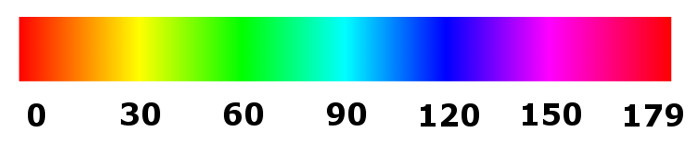
Здесь робот сообщает, какой цвет получен с камеры в цветовой модели HSV. Первая цифра – это цветовой тон (Hue), вторая – насыщенность (Saturation) и третья – значение или яркость (Value). Цветовой тон как раз и определяет цвет. В OpenCV он может принимать значения от 0 до 179, см. рисунок ниже.
Именно по цветовому тону робот пытается определить название цвета и высвечивает вопрос Is it blue? (Это синий?). Отвечать на него конечно не нужно, это робот сомневается:)
Насыщенность и яркость могут быть в пределах от 0 до 255. Чем меньше насыщенность, тем ближе к белому или серому будет цвет, чем меньше яркость – тем ближе к чёрному. Из чего мы можем сделать вывод, что чем больше значения насыщенности и яркости, тем проще будет определять цвет и отслеживать объект.
Дальше программа будет работать по-разному в зависимости от режима. Режим отладки отличается от нормального режима тем, что вы сможете видеть то, что видит камера через браузер. Конечно, это замедляет работу программы, но зато вы сможете оценить, как происходит работа с изображением. Подробнее об отладке поговорим чуть ниже, а сейчас посмотрим, что будет, если выбрать нормальный режим.
После взятия пробы, действия программы по-простому можно описать так: программа будет в цикле брать кадры с камеры, искать на них объекты такого же цвета, что и цвет пробы, с небольшим допуском, и двигать робота так, чтобы отслеживаемый объект был примерно в центре кадра и был примерно нужного размера. В каждой итерации на экране отрисовывается окружность на экране EV3, в том месте где на кадре обнаружен объект и того размера который удалось определить. Как только робот теряет объект, он останавливается и ждёт, пока объект появится снова.
К сожалению, все описанные действия микрокомпьютер EV3 делает медленно, и о плавности движений робота можно забыть, т.к. идёт большая задержка при обработке изображения. Поэтому моя программа двигает робота пошагово, на это можно обратить внимание на видео: нашли объект на кадре – крутим моторы робота на один шаг (т.е. угол), ищем объект снова и опять двигаем робота на один шаг, и так далее. Пока робот двигается, брать пробы не имеет смысла, т.к. это заведомо будут устаревшие сведения.
Чтобы остановить программу, нажмите и чуть подержите кнопку Esc.
Поиск объекта с помощью OpenCV
Здесь нужно сделать остановку и отдельно написать, как же я буду искать объект на изображениях, полученных с камеры. Делается это очень просто: мы будем искать на изображении пятно определённого цвета – это и будет наш объект.
Если расписывать в деталях, то делается это так. Сначала переводим полученную с камеры картинку в формат HSV с помощью функции cvtColor. В этом формате легче найти заданный цвет, ведь он определяется всего одной цифрой в интервале от 0 до 179, см. выше.
Затем ищем на картинке интересующий нас интервал цвета в кадре. Дело в том, что тот цвет, который изначально запомнил робот, может меняться в зависимости от освещения и теней, падающих на объект. Кроме того шарик, как его видит камера, покрашен неоднородно: светлее посередине и темнее к краям. Именно поэтому в программе мы используем интервал. Однако интервал не должен быть слишком большим, иначе у нас будет много ошибок.
Интервал ищется с помощью функции inRange. В результате работы функции получается чёрно белая картинка, где белыми точками обозначены точки, цвет которых попал в заданный интервал, а чёрными – все остальные.
После этого с помощью функции findContours находим контуры белых фигур, т.е. объекты. Конечно, здесь могут оказаться несколько объектов, но здесь уже ничего не поделаешь. В этом случае я выбираю наибольший найденный объект.
Вот собственно и всё. У найденного контура я могу узнать центр и размер. И, в зависимости от того, где этот контур, т.е. объект, расположен на картинке, я могу сделать вывод, куда нужно поворачивать камеру и двигать робота.
Для улучшения работы этого алгоритма лучше использовать размытие (функция blur) и поиск окружностей (функция minEnclosingCircle), но они замедляют поиск объектов. Поэтому в коде программы они закомментированы. Вы можете попробовать, как работает программа с ними, просто убрав комментарии.
Режим отладки
С нормальным режимом разобрались, теперь напишу, как работает программа в режиме отладки. Когда вы нажали кнопку «Вниз» при выборе режима – вы запустили режим отладки. В этот момент робот точно так же возьмёт пробу цвета, а затем появится следующая надпись:
Это призыв к тому, чтобы вы подключились к EV3 с помощью браузера. Программа в этой точке будет висеть, пока вы этого не сделаете. Для подключения к EV3 создайте файл с расширением .html со следующим содержимым:
Откройте его с помощью браузера Chrome или Firefox. Как только вы откроете созданный файл, робот оживёт, а в браузере появится потоковое видео с камеры, где будет обведён найденный контур:
![]()
Картинка, как видите, маленькая. Размером всего 160x120. Поверьте, даже с таким небольшим размером вы почувствуете тормоза. Однако такого размера вполне хватает для отслеживания объекта. В браузере вы можете увеличить масштаб, чтобы в картинку не нужно было вглядываться. Вот как это выглядит в масштабе 200%:
![]()
Одна красная линия обводит найденный с помощью библиотеки OpenCV контур, а вторая - это окружность, диаметр которой равен наибольшему размеру контура с центром в центре контура.
На экране EV3 в это время пишется следующий текст:
В верхней строке, как вы можете догадаться – радиус найденного объекта, а в нижней строке – режим отладки. Всего их 4: contour, mask, source и none. Если во время отладки вы будете нажимать на кнопку Enter на модуле EV3, вы будете переключать режим отладки. По умолчанию – это contour (контур). В этом режиме отображается видео с камеры, и сверху рисуются линии контура и окружность, про которые написано выше.
Следующий режим – mask. В этом режиме вы увидите результат работы функции inRange библиотеки OpenCV.
![]()
Следующий режим – source – это видео, полученное с камеры без обработки, см. картинку ниже.
![]()
Режим – none – это режим, в котором картинки в браузер не отправляются. Этот режим работает так, как будто отладки нет.
Итак, я написал все мысли, которые у меня были по поводу эксперимента с отслеживанием объекта с помощью библиотеки OpenCV.
При разработке этого эксперимента я использовал следующие статьи и исходники:
В цифровую камеру встроен компьютер. А так как камера — продукт массовый, то и интерфейсные возможности ее компьютера ограничены исключительно потребительскими функциями. Иногда ограничения удается частично снять, и умелый пользователь получает доступ к скрытым возможностям, позволяющим решать более интересные и сложные задачи, чем описаны в руководстве камеры. Как пример — CHDK для камер Canon (подробнее в статьях: «CHDK и Canon PowerShot G9», «Canon PowerShot A650IS», «CHDK RAW Developer — проявитель файлов CHDK-RAW»). Расширить функциональные возможности камеры можно и с помощью «внешнего» компьютера, роль которого могут исполнить настольные компьютеры, нетбуки, смартфоны, планшеты и разнообразные «конструкторы» (Arduino, Lego Mindstorms).
Компьютер камеры и внешний компьютер могут использоваться как для управления съемкой, так и для выполнения рутинных операций по перемещению камеры при выполнении съемки. Астрономы и астрофотографы, а также фотографы, снимающие панорамы, интервальное видео (цейтраферная съёмка), быстропротекающие процессы, давно используют разнообразные приводы для управления фото- и наблюдательной техникой. Но если они сделаны не на основе программируемых интерфейсов, то их функциональность ограничена. Программируемые (компьютеризованные) интерфейсы позволяют гибко настраивать приводы под конкретные задачи.
Тему роботизации фотосъемки начнем с «готового к работе из коробки» Lego Mindstorms NXT. Заодно покажем, как одно решение можно приспособить для выполнения разных задач. К плюсам Lego Mindstorms NXT можно отнести возможность сборки механической части из деталей комплекта и универсальность компьютерной части с аналоговыми и цифровыми каналами. К минусам — следствие плюсов: стенды из «универсальных кубиков» механически не очень надежны. Но для прототипирования «кубики» просто идеальны.
Сделаем из Lego Mindstorms NXT стенды для панорамной и цейтраферной (с проводкой) съемки.
В стандартный комплект Lego Mindstorms NXT (элементы можно приобретать и по отдельности) входит набор «кубиков» Lego, системный блок с дисплеем, кнопочным управлением, USB-интерфейсом, портами для сервомашинок (3 порта) и сенсоров (4 порта), сервомашинки (3 штуки) и сенсоры (датчики касания, уровня освещения, звука, ультразвуковой дальномерный датчик), программное обеспечение. Так как конструктор предназначен для детей, то он прост и хорошо защищен.
Системный блок Lego Mindstorms NXT может работать автономно или как посредник между компьютером и электронно-механической частью приводов и сенсоров. Встроенная память позволяет хранить несколько пользовательских программ, а кроме того содержит простейшие скомпилированные программы для управления игрушками и опроса сенсоров.
Основой создаваемого стенда будет привод-сервомотор. Управлять им будет программа, задающая момент и угол поворота камеры. Синхронно программа должна управлять камерой — снимать в тот момент, когда камера неподвижна между циклами поворота.
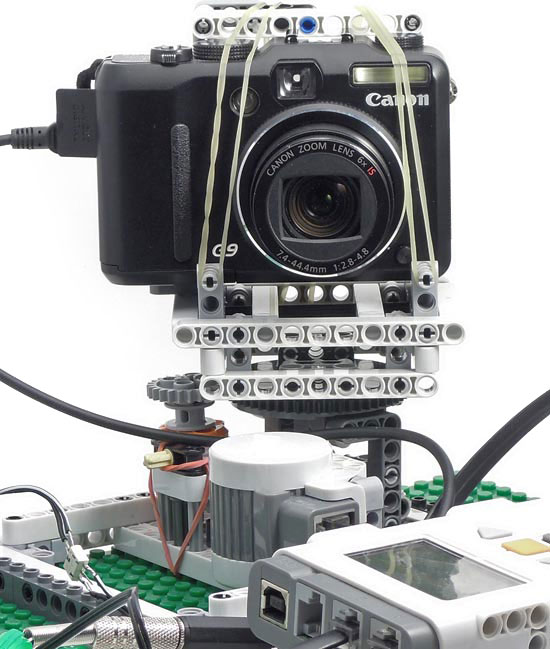
Построим механический стенд с приводом — сервомашинкой. Из шестеренок Lego можно собрать редукторы с коэффициентом передачи 1:1—1:4. Мне удалось сделать вполне надежную конструкцию, способную вращать камеру, с шестеренками, обеспечивающими понижение скорости втрое. На самом деле, скорость значения не имеет, просто для цейтраферной съемки с панорамированием требуется очень малый угол поворота на цикл, а сервомашинка надежно отрабатывает лишь углы примерно от 2 градусов и более. Детали стенда стоит дополнительно зафиксировать резинками:

Для управления стендом с помощью системного блока Lego Mindstorms NXT достаточно одного канала на сервомашинку. Для управления съемкой я также выбрал канал сервомашинки. Дело в том, что на ее электродвигатель подается постоянное напряжение, и этот сигнал можно использовать для нажатия на спуск камеры.
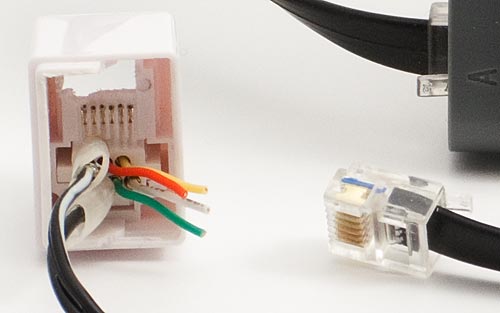
Особенность используемой мною камеры Canon PS G9 — в отсутствии штатной возможности дистанционного управления, так что задача несколько усложняется. В статье, посвященной CHDK для Canon PS G9, описано, как можно управлять съемкой, подавая напряжение 5 В на USB-порт камеры. Чтобы подключить камеру к Lego Mindstorms NXT, нужно сделать переходник на USB, соединив провода питания USB с черным и белым проводами Lego Mindstorms NXT (рецепт отсюда). Так как USB не очень универсальный разъем, стоит добавить между USB и Lego Mindstorms NXT разъем типа «моно-мини-джек», что может пригодиться в будущем для управления другими устройствами (лампочками, двигателями и т. д.).
Чтобы не резать провод Lego Mindstorms NXT с «фирменным» разъемом, можно подключить его к «моно-мини-джеку» через модифицированный разъем RJ25. Разъем под шестижильный Lego Mindstorms NXT отличается от RJ25 только размещением замка, и RJ25 легко доработать напильником до требуемой конфигурации, просто пропилив дырку под фирменный замок (вместо замка-защелки придется пользоваться канцелярской резинкой):

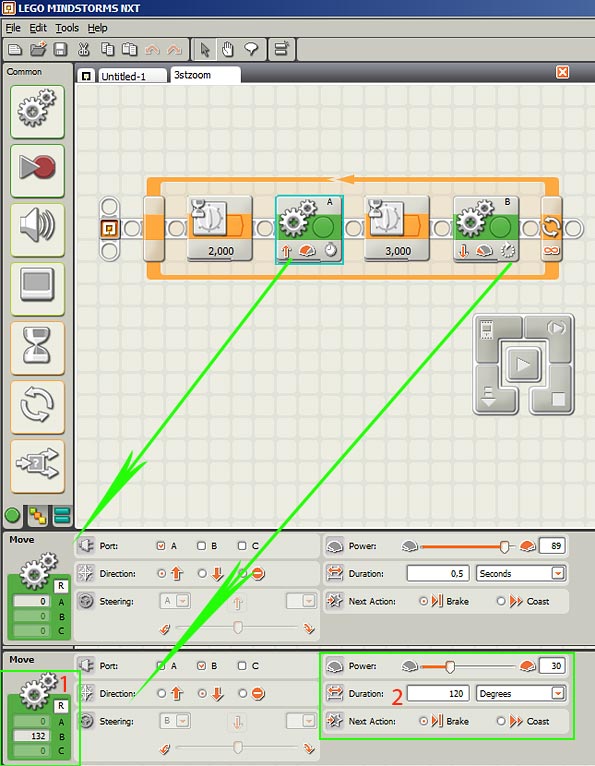
Следующий шаг — написание программы для управления стендом и съемкой. Для этого будем использовать программу Lego Mindstorms NXT из комплекта. Это среда визуального программирования методом перемещения управляющих, сигнальных и логических блоков на направляющую последовательности выполнения команд:
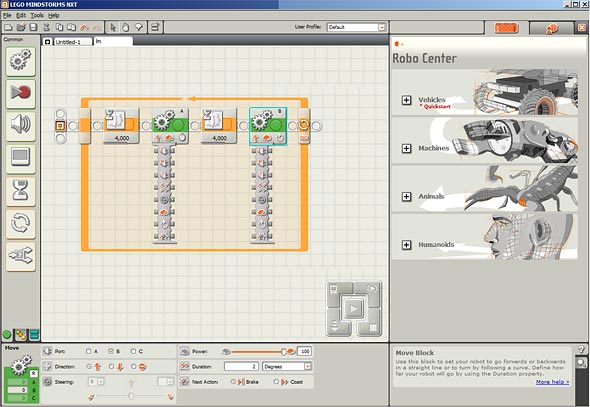
Программа для панорамной съемки состоит из команд задержки в 2 секунды, сигнала на съемку (подача напряжения на USB дистанционного управления камерой в течение 0,5 секунд, что достаточно для режима ручной фокусировки; для автофокусной системы придется дублировать подачу напряжения через небольшой промежуток времени), задержки в 3 секунды и поворота на требуемый угол. Команды выполняются циклически, пока на системный блок пульта управления не будет подана команда выхода из программы (см. видеоролики о работе стенда в конце статьи).
При программировании нужно учесть, что сигнал на первую сервомашинку (я выбрал «А»), роль которой у нас выполняет USB-пульт управления камерой, используется лишь частично, и системный блок не получает ответный сигнал от сервомашинки. Поэтом ее управление нужно программировать именно на длительность подачи сигнала соответствующей полярности, а не на количество оборотов или угол поворота (иначе программа просто зависнет, ожидая ответ от потенциометра сервомашинки).
Мотор «B», который и вращает стенд с камерой, нужно запрограммировать на требуемый угол поворота и фиксацию (есть еще режим «поворот и вращение по инерции»). Если стенд будет подключен к компьютеру в процессе съемки, то угол поворота можно произвольно менять. Если стенд будет использоваться автономно, то можно сделать несколько программ с разными углами поворота и разным направлением.
На практике я определял угол поворота под фокусное расстояние оптики камеры следующим образом. Устанавливал камеру на стенд, аккуратно зумировал объектив, считая число шагов зума. Далее, вращая маленькую шестеренку редуктора на стенде по обратной связи сервопривода с программой, определял угол требуемого для панорамирования поворота (отмечено 1 ) и заносил его в окно управления двигателем ( 2 ). При съемке в моем системной блоке были программы на 0, 3, 5, 7 шагов зума. Значение параметра мощности и полярности управляющих двигателей подбирается из соображений устойчивого срабатывания камеры по сигналу на USB и сравнительно «мягкого» поворота стенда с камерой (при полной мощности возможно проскальзывание шестерен, а тяжелая камера получает сильный вращательный момент и нужно дольше ждать перед нажатием на спуск, пока погасятся ее движения).
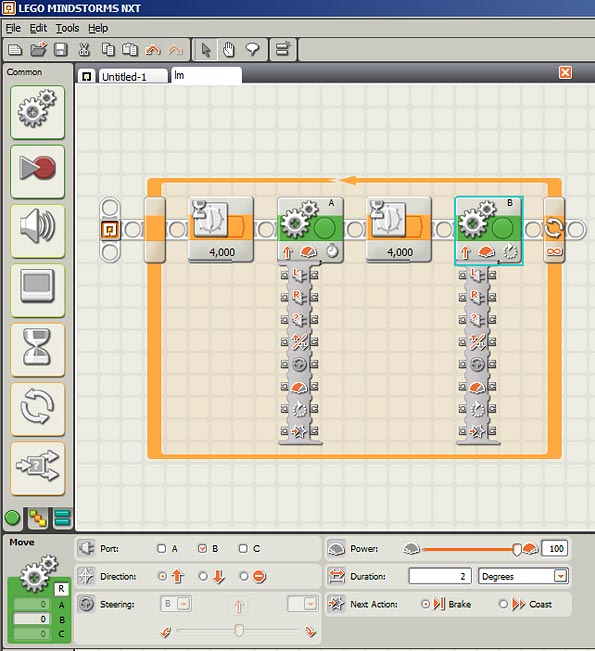
Программа для проводки при цейтраферной съемке подобна описанной выше. Угол поворота сервопривода — минимальный более-менее устойчивый для конструкции — 2 градуса, да и то при полной мощности. Задержка между снимками — 8 секунд.
Для желающих программировать Lego Mindstorms NXT (и других роботов) менее визуально, могу рекомендовать программу Bricx Command Center. С ее помощью можно программировать работу не только со штатными датчиками и приводами, но и с прочими, в том числе сделанными самостоятельно.

- Если правила сайта не понятны, я пропишу отдельно в правилах сообщества: НИКАКОЙ РЕКЛАМЫ. Вообще. Реселлеров, магазинов, частных лиц и прочего.
камера из лего и корпус из лего это вот совсем разные вещи)
а разве корпус, это не одна из составляющих?

Тяжелый экскаватор Lego 42121 модель Б
Тяжелые времена настали для поклонников лего в России. Поэтому сегодня мой пост будет посвящен не новинке, а альтернативной модели на которую я уже делал обзор. Ссылка на обзор ниже.
Что в итоге должно получится.

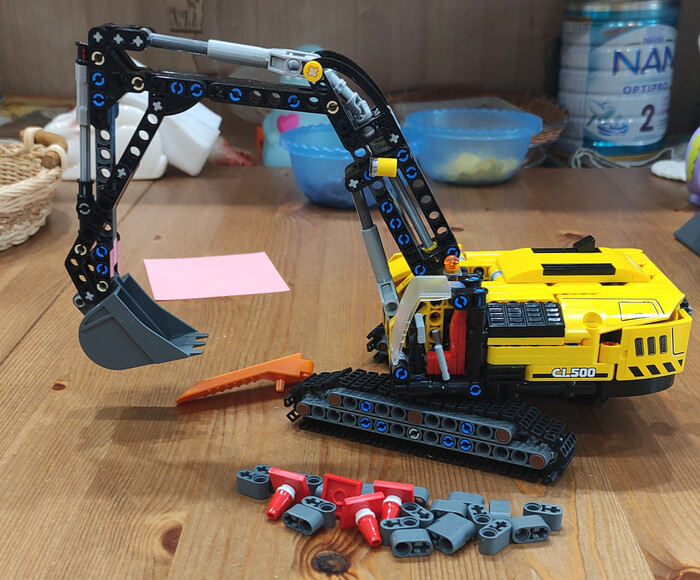
Разбираем на запчасти. В ход пойдут даже детали балок на 2, которые внизу кадра.

Так как это альтернативная модель, то этапов сборки не будет. Привожу несколько фотографий процесса.

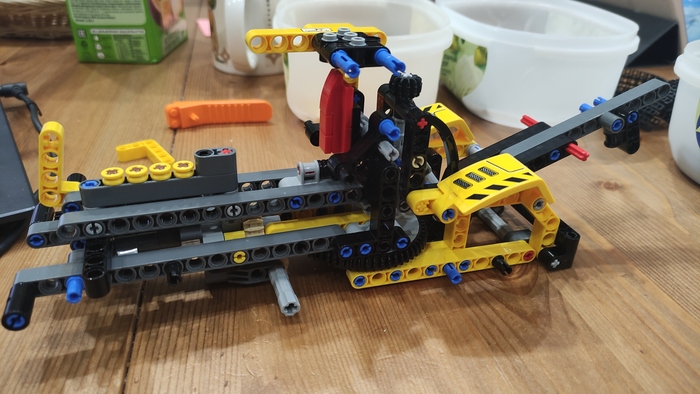

Вот что в итоге получилось. Экскаватор теперь больше похож на трактор на четырех гусеницах. Задняя часть может поворачиваться. Есть подобие мотора. Из конусов осталось только два, маленькие балки на 2 были задействованы в модели.

Деталей после сборки осталось не много.

Что имеем в итоге. Модель не дурна и задействует почти все детали из основного набора. Появился макет двигателя. Но при этом в конструкции ощущается, что модель сделана по остаточному принципу. Некоторые детали крепятся свободно и могут легко перемещаться, от сиденья в кабине осталась лиши спинка. Участь данной сборки уже предрешена - ребёнок поиграет несколько дней и соберу назад.
Xiaomi Mitu Transformers Optimus Prime QTZ011QI
В начале года появилась неожиданная новость, что Lego в коллаборации в Hasbro (по факту конкурентом) выпустит сборную модель Оптимуса Прайма в серии Creator Expert. Я начал гуглить хоть какие-нить изображения будущего набора, и обнаружил что уже существуют лицензионные lego-like трансформеры от Xiaomi. Правда официально лицензия распространяется только на рынок Китая и, как и другие наборы от Xiaomi, эти конструкторы выполнены в формате Technic. Причем по мимо собственно самого Оптимуса Прайма в это серии есть еще четыре трансформера – Бамблби, Мегатрон, Старскрим и Гримлок.
В прочем, в наших магазинах в наличии был только Оптимус Прайм, а так как новые официальные наборы Lego мы в России похоже увидим еще не скоро я решил посмотреть на модель от Xiaomi.
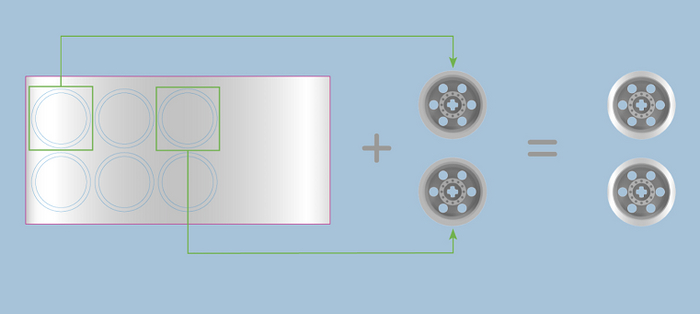
Коробка достаточно большая, сравнима с топовым наборами Lego, при этом никакого нездорового гигантизма присущего китайским наборам. Все свободное пространство забито деталями. Количество деталей – 1280 шт. Для сравнения – это уровень Lego Technic 42126 Ford F-150 Raptor, в котором всего на 100 деталей больше. При этом внутренняя компоновка больше походит на эксклюзивные наборы вроде Lego Technic 42115 Lamborghini Sian FKP 37. Плюс уже после сборки набора, я обнаружил, что внутренние отсеки коробки трансформируются (ха!) – их можно дополнительно разделить пополам для более удобной сортировки уже распакованных деталей. Определенно, в плане упаковки Lego есть чему учиться у Xiaomi.



Два больших лотка с помощью лепестков в стенке разделятся на два лотка по меньше.
В основном это обычные техник-детали. Качество самих деталей нареканий не вызывает, разве что некоторые коннекторы слишком тугие. Светлое серые и черные детали совпадают со цветами Lego, а вот красный не такой как в Lego, он ближе к томатному (в прочем у Lego такой цвет иногда встречается в виде различных коннекторов, но по факту это считается браком колеровки, так как официально это тот же красный цвет), а темно синий, насколько я знаю, и вовсе отсутствует в палитре Lego.
Слева деталь Lego, справа - Xiaomi. Это не разница в освещении, они действительно отличаются по цвету.
Есть несколько деталей, которые у Lego я ни разу не встречал, не уверен, что они вообще в Lego существуют. Шарниры, как вилки, так и розетки, сделаны из какого-то другого пластика, не из такого как остальные детали, и не такого из которого делает Lego. Он как будто прорезинен. Шарниры достаточно тугие, для вставки требуется усилие, сколько они продержатся – покажет время.
Также в наборе есть проприетарные детали. В первую очередь это конечно голова Оптимуса Прайма – это цельная неразборная деталь, которая крепится с помощью вилки большого шарнира. Есть пара панелей 3x7 цвета trans-blue (в Lego прозрачные панели на данный момент вообще не существуют, а жаль), а также пара обычных панелей 3x7 с выштамповкой (!) знака Автоботов. Честно говоря, я не ожидал, что Xiaomi настолько заморочатся, Lego бы просто сделали наклейки.

Кстати, о наклейках. В наборе они есть. В первую очередь это наклейки на серые детали, которые превращают их в серебристые (ну или в металлические). Клеить наклейки – это та еще задача. У Lego если наклейка клеится на всю деталь, то обычно сама наклейка чуть меньше по размерам чем деталь. Xiaomi вырезала наклейки четко по размерам – если не приклеить наклейку точно к краю, значит с другой стороны она будет выходить за пределы детали. И это с учетом того, что большинство деталей имеют форму отличную от прямоугольной, либо имеют различные закругления или выступы на плоскости. Кому и этого будет мало – есть задача со звездочкой – наклеить круглую наклейку с толщиной в пару миллиметров на круглый обод колеса той же толщины. Так же, уже после окончания сборки, часть наклеек предлагается наклеить сразу на несколько деталей, а часть наклеек вообще не встречается в инструкции. К цвету наклеек никаких претензий нет (камень в огород Lego, которые уже много лет не могут разобраться как печатать наклейки того же цвета, что и детали).
Кто там жаловался, что Lego делает круглые наклейки на круглые детали?
Несмотря на то, что детали расфасованы по примерно двадцати пакетам ни о каких этапах сборки речи не идет. Все пакеты нужно вскрывать сразу. Поэтому перед сборкой лучше заранее все рассортировать. Благо разные пакеты содержат разные детали, и даже парные (левая и правая) панели разложены по отдельным пакетам.
Бумажной инструкции в наборе нет, только QR-код со ссылкой на приложение, в котором можно эту инструкцию скачать.
Пару лет назад у меня уже был опыт сборки конструкторов от Xiaomi, и вот тогда для получения инструкции нужно было пройти целый квест. В тот момент у Xiaomi было два приложения – международное, в котором были инструкции на наборы, которые официально продавались в России, и китайское – в котором были инструкции на все наборы. Естественно, в нашем регионе скачать можно было только международное, в котором нужной мне инструкции не было. А китайское приложение надо было ставить на Android в виде скаченного со стороннего сайта apk. Если у вас было только устройство с iOS, то вы оставались без инструкции.
Поэтому я уже морально подготовился снова походить этот квест, но оказалось, что новое приложение доступно в российском App Store. Оно хоть и на китайском, но за счет картинок никаких проблем в использовании нет.
В прочем другой недостаток инструкций Xiaomi никуда не делся. Каждый шаг сборки занимает равно одну деталь, в редких случаях две. Поэтому количество шагов примерно равно количеству деталей. В данной инструкции их 1233. Естественно, каждый шаг занимает одну страницу, после чего ее нужно перелистнуть. Все это сильно замедляет сборку, по сравнению с наборами от Lego. Так что, если вы уже собирали Lego со схожим количеством деталей – можете смело умножать затраченное время на два. Зато все в 3D, и если вдруг что-то не понятно, то можно посмотреть с разных сторон. Опять же, в отдельных случаях есть дополнительные пояснения по правильному порядку сборки.

Позади примерно 5-6 часов сборки.
При самой сборке каких-то сложностей не возникло, разве что уже упомянутый момент с наклейками.
Собранная модель имеет подвижность во всех нужных местах – голова, плечи, локти, запястья, пояс, колени и голеностоп. За счет резиновых вставок на ступнях модель не скользит. Поэтому с устойчивостью никаких проблем нет. Но это все-таки больше полочная модель, чем игрушка.
Хоть это и трансформер – он ни во что не трансформируется. Для того, чтобы получился тягач – робота нужно разобрать и собрать грузовик уже по другой инструкции, которая так же есть в приложении.
Для оценки размера поставил рядом минифигурку.
Даже с учетом всех вышеописанных недостатков модель мне понравилась, думаю при возможности куплю и другие наборы из этой серии. Ну и будет интересно сравнить с моделью от Lego, там вроде как обещают возможность трансформации без пересборки.
Читайте также: