
Как сделать робота из лего с мотором
Обновлено: 01.05.2024
Мы обожаем LEGO и Crazy Circuits [LEGO-совместимая электроника / прим. перев.], поэтому решили скомбинировать их в простого и интересного робота, умеющего обходить препятствия. Мы покажем, как собрать такого робота и подробно опишем этот процесс. Ваша версия робота может не полностью совпадать с нашей.

Приводим список необходимой электроники и деталек LEGO. Не бойтесь экспериментировать с ними.


Комплектующие
Электроника
- 1 x плата Robotics Board от Crazy Circuits
- 2 x совместимый с LEGO сервомотор полного вращения
- 1 x ультразвуковой датчик расстояния HC-SR04
- 4 x джампер-кабеля «мама-мама»
- 1 x внешний источник питания с USB
Мы использовали различные детальки, а вам рекомендуем сделать так, как вы считаете нужным, и из того, что есть у вас на руках. Важно, чтобы у вас был способ приделать сервомоторы снизу, ультразвуковой датчик – так, чтобы он смотрел вперёд, и каким-то образом закрепить плату и источник питания. Для этого можно использовать двусторонний скотч, резинки, липучку. Приводим ссылки на наши детальки в магазине BrickOwl, однако вы можете купить их где угодно, где продаётся LEGO и совместимые наборы.
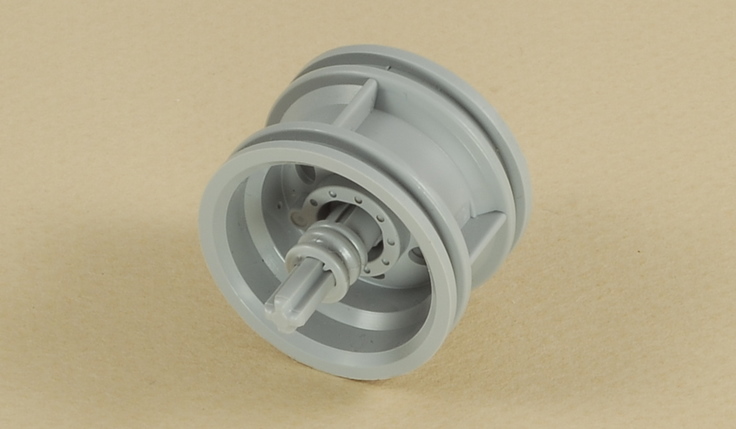
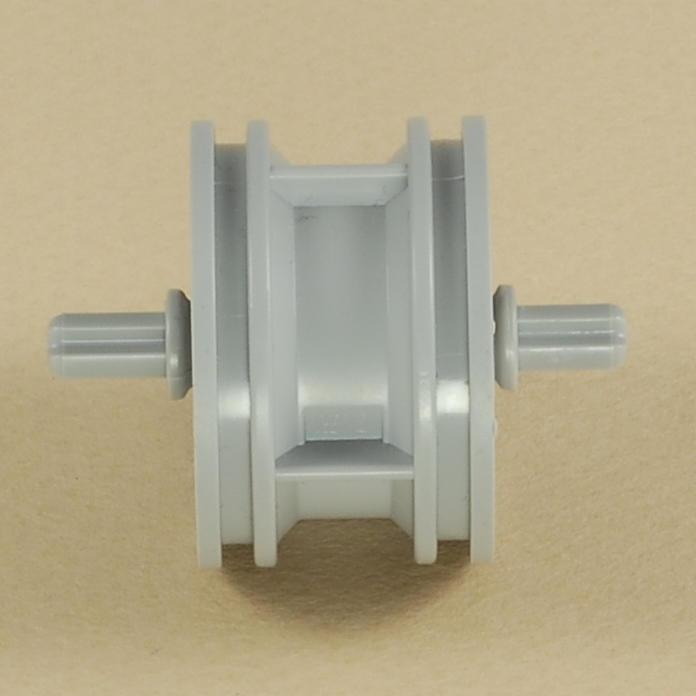
- 2 x LEGO Wedge Belt Wheel (4185 / 49750)
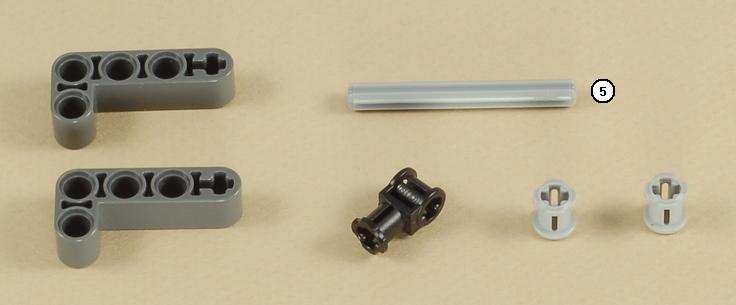
- 1 x LEGO EV3 Technic Ball Pivots Set 5003245
- 1 x LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- 1 x LEGO Technic Brick 1 x 6 with Holes (3894)
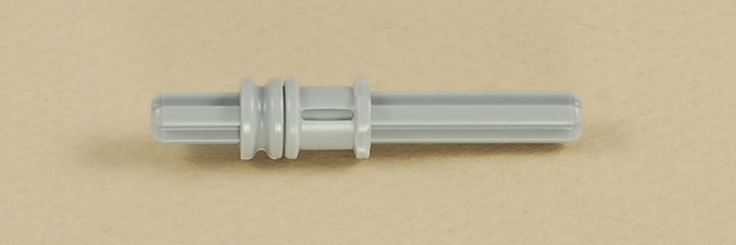
- 2 x LEGO Axle 4 with End Stop (87083)
- 4 x LEGO Half Bushing (32123 / 42136)
- 4 x LEGO Brick 2 x 2 Round (3941 / 6143)
- 1 x LEGO Plate 6 x 12 (3028)
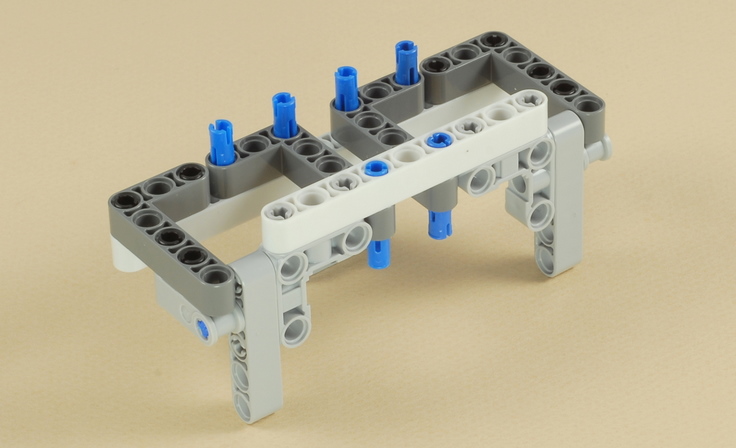
Шаг 1: строим шасси из LEGO

Мы начали с пластинки LEGO 6×12, это был минимальный размер, который нас устроил. Можно использовать более крупную, однако мельче уже будет сложнее.
Ширина робота определялась имеющимся у нас в наличии внешним источником питания, поскольку нам была нужна возможность вставлять его на место. Для аккумулятора большего размера потребуется робот большего размера.
Шасси должно быть достаточно высоким, чтобы на нём разместилась и батарея, и плата сверху.
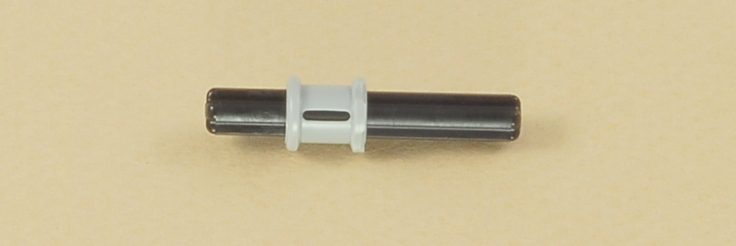
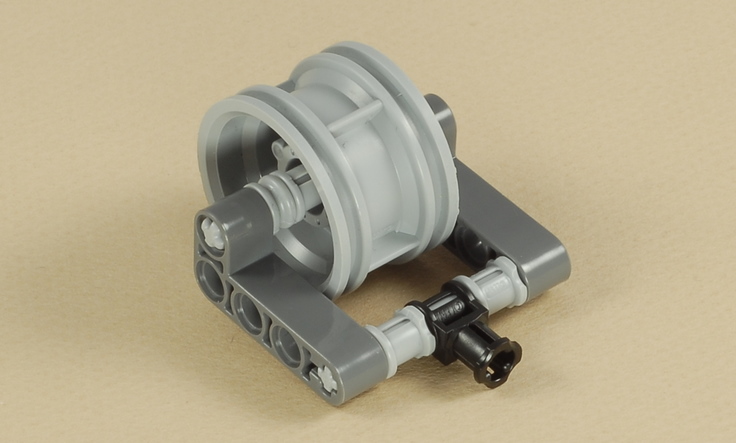
Шаг 2: добавляем колёса







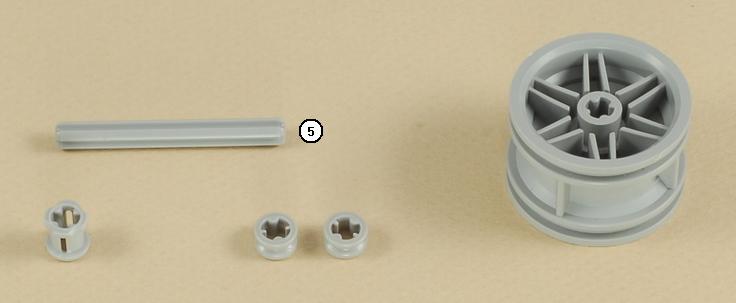
Каждый сервомотор нужно разместить снизу шасси. В итоге нам понадобились следующие комплектующие:
- Ось 4 LEGO со стопором (87083)
- Втулка LEGO (32123 / 42136)
- Круглый кирпичик LEGO 2 x 2 (3941 / 6143)
Как и с другими модельками LEGO, вариантов тут масса! У нас получилось с теми комплектующими, что мы перечислили, а вы можете попробовать что-нибудь другое.
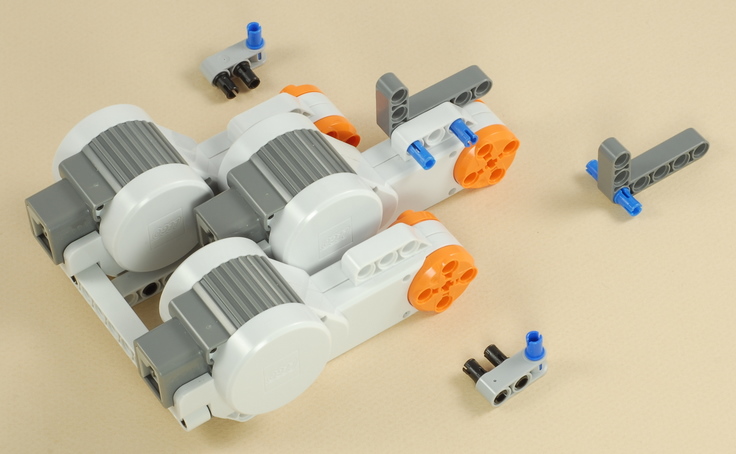
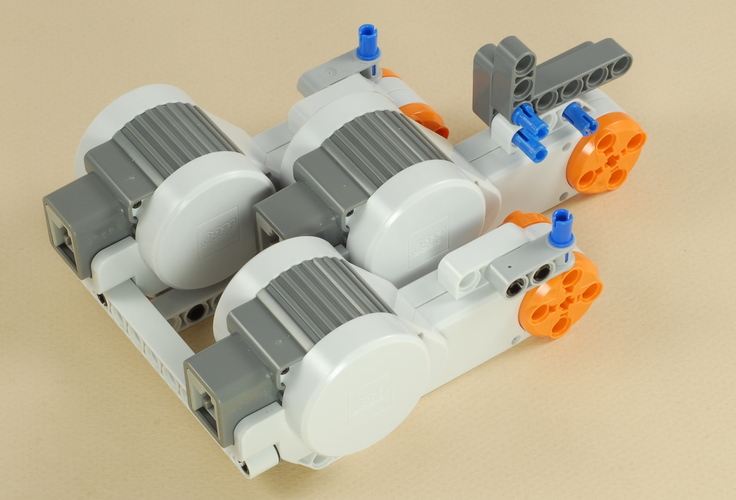
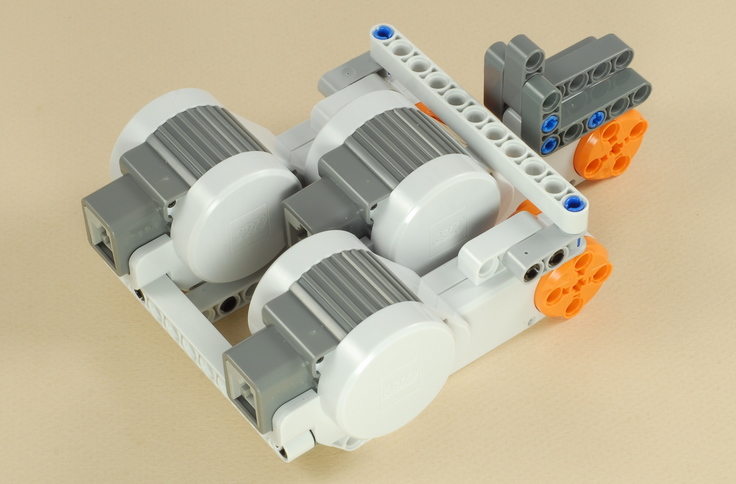
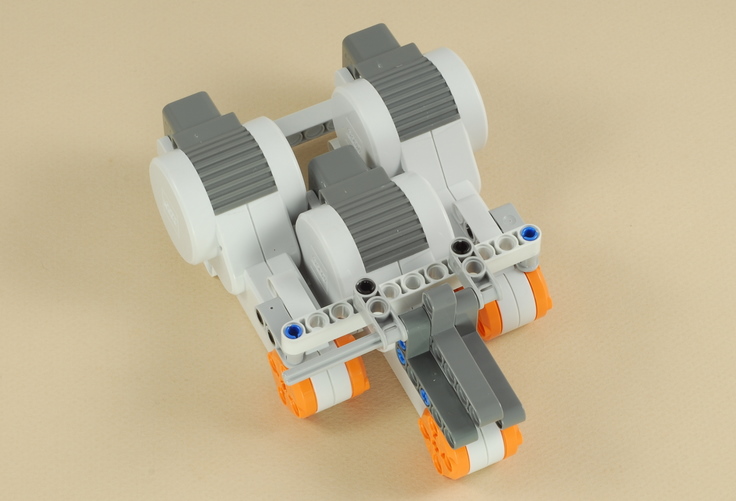
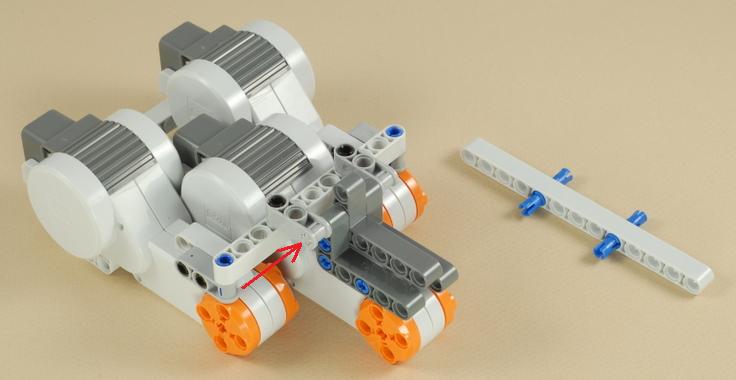
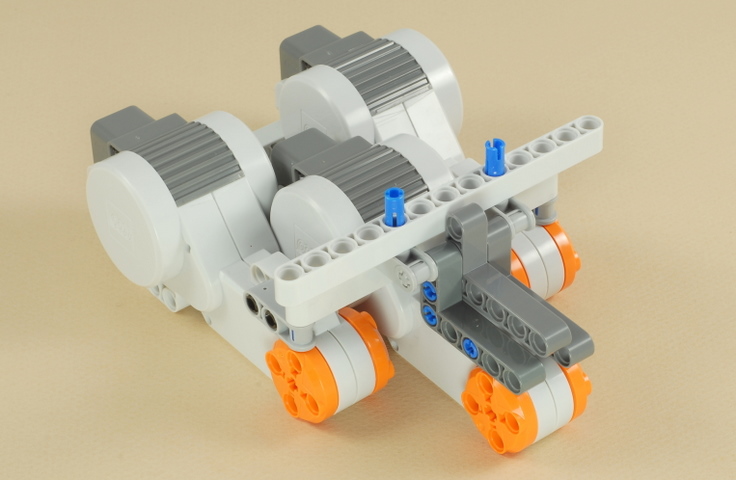
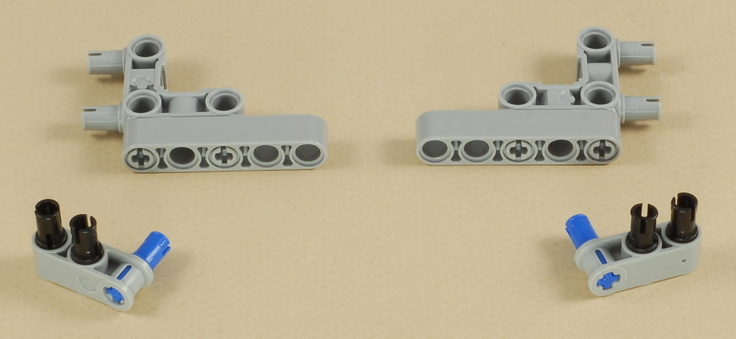
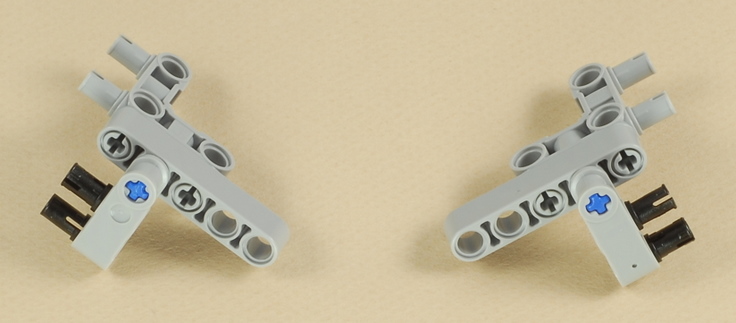
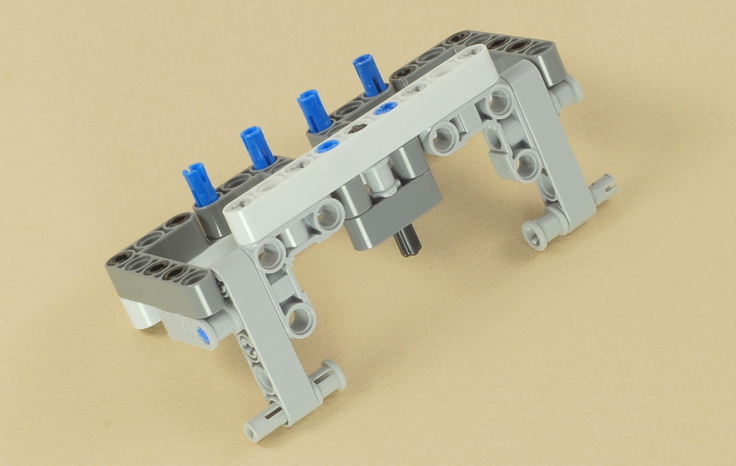
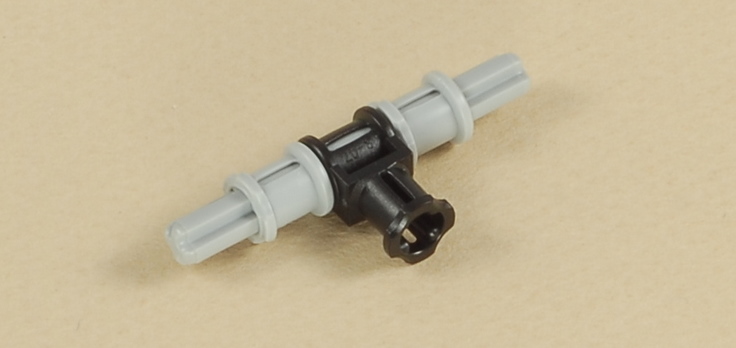
Шаг 3: добавляем ролик




Наш ролик позволяет роботу кататься по плоскости на двух моторизованных колёсах, играя роль третьего колеса – так роботу легче поворачивать и двигаться.
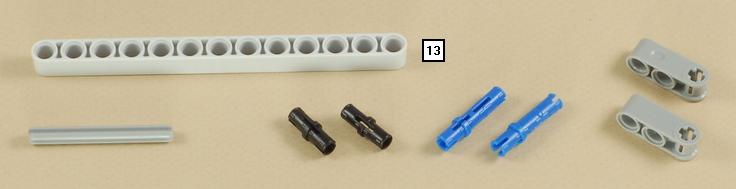
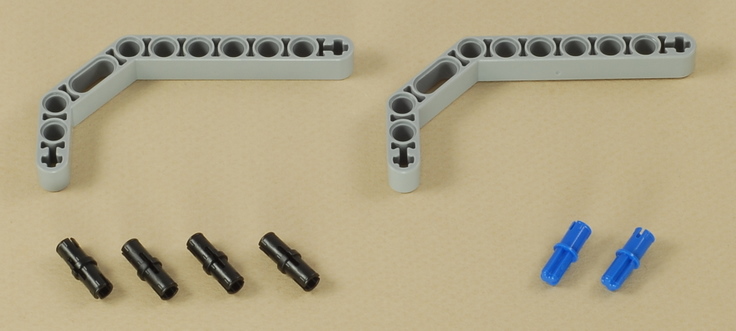
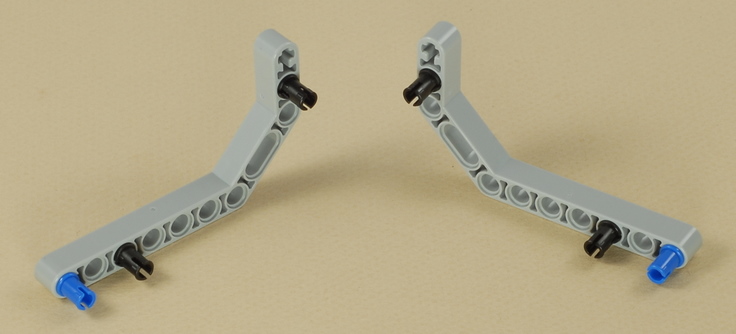
Для его закрепления потребовались следующие детали:
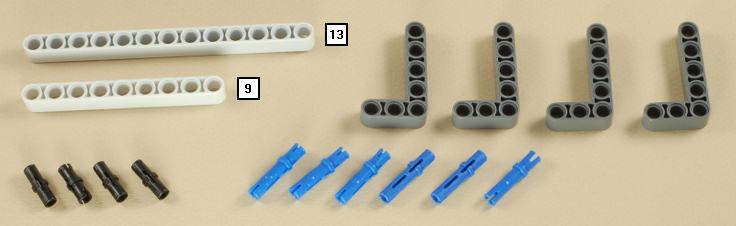
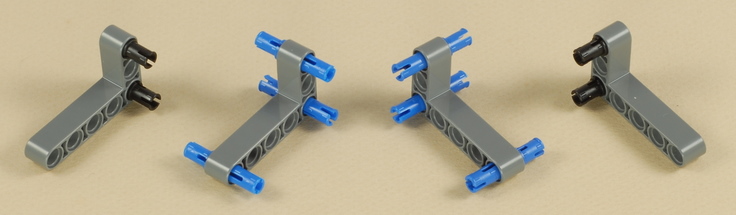
- LEGO EV3 Technic Ball Pivots Set 5003245
- LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
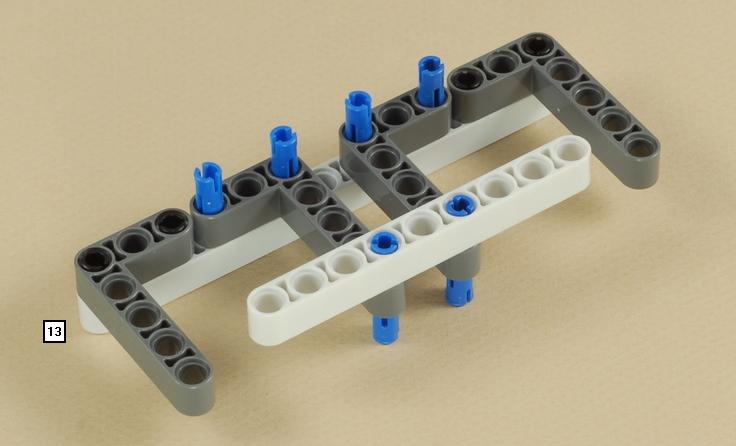
- LEGO Technic Brick 1 x 6 with Holes (3894)
Шаг 4: добавляем датчик расстояния



Ультразвуковой датчик расстояния нужно закрепить на передней части робота, чтобы он «видел», куда едет, и понимал, когда нужно остановиться, чтобы не столкнуться с препятствием.
Если 3D-принтера у вас нет, придумайте, как удержать датчик при помощи деталек LEGO, клейкой ленты, резинок, хомутов и т.п. Важно, чтобы он смотрел прямо – туда, куда едет робот, когда движется вперёд.
Шаг 5: добавляем плату




Плата – мозг всей операции. Она размещается наверху кубиков LEGO, поэтому её крепить легко.
Обычно плата Robotics Board используется совместно с проводящей плёнкой, позволяющей мастерить электрические цепи прямо поверх LEGO, но поскольку у нас тут всего лишь два мотора и датчик расстояния, их можно подключить напрямую к штырькам на плате.
Плату размещаем так, чтобы USB-кабель питания было легко воткнуть. Нам повезло найти в коробке с кабелями очень короткий USB-кабель.
Теперь можно подключать датчик и моторы!
По датчику: разъём echo нужно подключить к контакту 3 на плате, разъём trigger – к контакту 5, VCC – к 5 В, Gnd – к GND. Таким образом датчик будет получать питание и общаться с платой.
Затем нужно подключить каждый из моторов. Это сделать легко – коричневые провода на GND, красные – на 5 В, оранжевые – к контакту D6 для левого мотора и D9 для правого.
Шаг 6: программируем Robotics Board

Перед тем, как робот сможет работать, нужно загрузить код в микроконтроллер. Перед этим убедитесь, что у вас на компьютере установлена последняя версия Arduino IDE.
Свой код мы выложили в репозиторий на GitHub:
Код простой, в нём много комментариев, чтобы было понятно, что за что отвечает.
Вам также потребуется библиотека NewPing
Шаг 7: пускаем робота погулять



Построив робота и загрузив в него код, можно переходить к испытаниям!
Проще всего подключить внешний источник питания и дать роботу возможность ехать вперёд. Если выставить перед ним руку, он должен отодвинуться назад, повернуться и снова поехать вперёд (смотрите, чтобы он не съехал со стола!)
Мы построили простую шестиугольную «арену» из картона, чтобы роботу было где поездить. Не бойтесь экспериментировать с тем, что есть у вас.
Шаг 8: дальнейшее развитие


Если вам интересно развивать этот проект, вот вам вопросы:
— что вы узнали, собирая робота?
— что повлияло на ваш выбор деталей?
— поедет ли робот быстрее, если увеличить ему колёса?
В коде есть две переменных, исправив которые, вы измените время отката робота назад при обнаружении препятствия, и время, которое он будет поворачиваться. Попробуйте поменять goBackwardTime и turnRightTime и посмотреть, как это повлияет на поведение робота.
Привет, Хабр! Мы уже рассказывали о платформе LEGO MINDSTORMS Education EV3. Основные задачи этой платформы — обучение на практических примерах, развитие навыков STEAM и формирование инженерного мышления. В ней можно проводить лабораторные работы по изучению механики и динамики. Лабораторные стенды из кубиков LEGO и утилиты по регистрации и обработке данных делают опыты еще интереснее и нагляднее и помогают детям лучше понять физику. Например, школьники могут собрать данные о температуре плавления и с помощью приложения систематизировать их и представить в виде графика. Но это только начало: сегодня мы расскажем, как дополнить этот набор средой программирования MicroPython и использовать его для обучения робототехнике.

Учим программированию с помощью EV3
Современные школьники хотят видеть красочный результат. Да, им скучно, если программа выводит в консоль числа, и они хотят рассматривать цветные графики, диаграммы и создавать настоящих роботов, движущихся и выполняющих команды. Обычный код тоже кажется детям слишком сложным, поэтому обучение лучше начинать с чего-нибудь полегче.
Базовая среда программирования EV3 создана на основе графического языка LabVIEW и позволяет задавать алгоритмы для робота визуально: команды представлены в виде блоков, которые можно перетаскивать и соединять.

Такой способ хорошо работает, когда нужно показать, как строятся алгоритмы, но он не подходит для программ с большим количеством блоков. При усложнении сценариев необходимо переходить на программирование с помощью кода, но детям трудно сделать этот шаг.
Здесь есть несколько хитростей, одна из которых — показать, что код выполняет те же задачи, что и блоки. В среде EV3 это можно сделать благодаря интеграции с MicroPython: дети создают одну и ту же программу в базовой среде программирования с помощью блоков и на языке Python в Visual Studio Code от Microsoft. Они видят, что оба способа работают одинаково, но кодом решать сложные задачи удобнее.
Переходим на MicroPython
Среда EV3 построена на базе процессора ARM9, и разработчики специально оставили архитектуру открытой. Это решение позволило накатывать альтернативные прошивки, одной из которых стал образ для работы с MicroPython. Он позволяет использовать Python для программирования EV3, что делает работу с набором еще ближе к задачам из реальной жизни.
Чтобы начать работать, нужно скачать образ EV3 MicroPython на любую microSD-карту, установить ее в микрокомпьютер EV3 и включить его. Затем нужно установить бесплатное расширение для Visual Studio. И можно приступить к работе.
Программируем первого робота на MycroPython

На нашем сайте есть несколько уроков для освоения базовых понятий робототехники. Модели на EV3 знакомят детей с азами, которые используются в самоуправляемых автомобилях, заводских роботах-сборщиках, станках с ЧПУ.
Мы возьмем для примера чертежную машину, которую можно научить рисовать узоры и геометрические фигуры. Данный кейс является упрощенным вариантом взрослых роботов-сварщиков или фрезеровщиков и показывает, как можно использовать EV3 совместно с MicroPython для обучения школьников. А еще чертежная машина может разметить отверстия в печатной плате для папы, но это уже другой уровень, требующий математических расчетов.
Для работы нам понадобятся:
- базовый набор LEGO MINDSTORMS Education EV3;
- большой лист клетчатой бумаги;
- цветные маркеры.
Сначала инициализируем библиотеку модулей EV3:
Настраиваем платформу, которая вращает ручку как мотор в порте B. Задаем передаточное отношение двухступенчатой зубчатой передачи с количеством зубьев 20-12-28 соответственно.
Настраиваем подъемный механизм для ручки как мотор в порте C:
Настраиваем гироскоп, измеряющий угол наклона ручки, в порте 2:
Настраиваем цветовой датчик в порте 3. Датчик используется, чтобы определять белую бумагу под чертежной машиной:
Настраиваем датчик касания в порте 4. Робот начинает рисовать, когда датчик нажат:
Определяем функции, которые поднимают и опускают ручку:
Определяем функцию для поворота ручки на заданный угол или до определенного угла:
Если целевой угол больше, чем текущий угол гироскопического датчика, продолжаем движение по часовой стрелке с положительной скоростью:
Если целевой угол меньше, чем текущий гироскопического датчика, то двигаемся против часовой стрелки:
Останавливаем вращающуюся платформу, когда целевой угол будет достигнут:
Устанавливаем начальное положение ручки в верхнем положении:
Теперь идет основная часть программы — бесконечный цикл. Сначала EV3 ожидает, когда датчик цвета обнаружит белую бумагу или синюю стартовую клетку, а датчик касания будет нажат. Затем он рисует узор, возвращается в исходное положение и повторяет все заново.
Когда устройство не готово, светодиоды на контроллере принимают красный цвет, и на ЖК-экране отображается изображение «палец вниз»:
Дожидаемся, когда датчик цвета считает синий или белый цвет, устанавливаем цвет светодиодов зеленым, отображаем на ЖК-экране изображение «палец вверх» и сообщаем, что устройство готово к работе:
Дожидаемся нажатия датчика касания, присваиваем гироскопическому датчику значение угла 0 и начинаем рисовать:
Поднимаем держатель ручки и возвращаем его в исходное положение:
Вот такая несложная программа у нас получилась. И теперь запускаем ее и смотрим на робота-чертежника в деле.
Что дают такие примеры

EV3 — это инструмент для профориентации в рамках профессий STEM и точка входа в инженерные специальности. Так как на нем можно решать практические задачи, дети получают опыт технических разработок и создания промышленных роботов, учатся моделировать реальные ситуации, понимать программы и анализировать алгоритмы, осваивают базовые конструкции программирования.
Поддержка MicroPython делает платформу EV3 подходящей для обучения в старших классах. Ученики могут попробовать себя в роли программистов на одном из самых популярных современных языков, познакомиться с профессиями, связанными с программированием и инженерным проектированием. Наборы EV3 показывают, что писать код — это не страшно, готовят к серьезным инженерным задачам и помогают сделать первый шаг к освоению технических специальностей. А для тех, кто работает в школе и связан с образованием, у нас подготовлены программы занятий и учебные материалы. В них детально расписано, какие навыки формируются при выполнении тех или иных задач, и как полученные навыки соотносятся со стандартами обучения.
К конструкции робота имеется возможность вставить ось для предотвращения поворота третьего колеса. В случае установки оси робот будет ехать прямо. Поворот при этом будет осуществляться двигателями.
Вы можете экспериментировать с роботом как со свободно вращающимся 3-м колесом, так и заблокировав его движение.
Инструкция по сборке





 | ИЛИ |  |
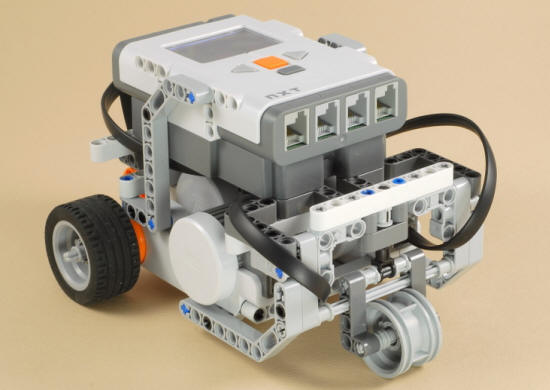
Вы можете использовать NXT либо с батарейками типа АА или со специализированной аккумуляторной батареей NXT.
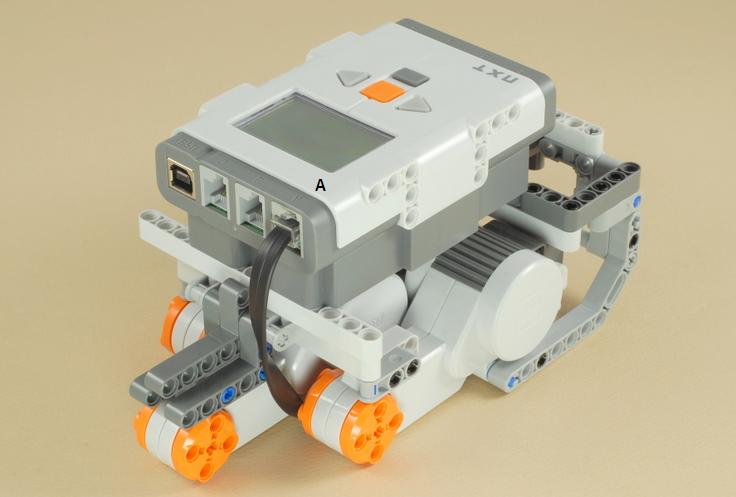
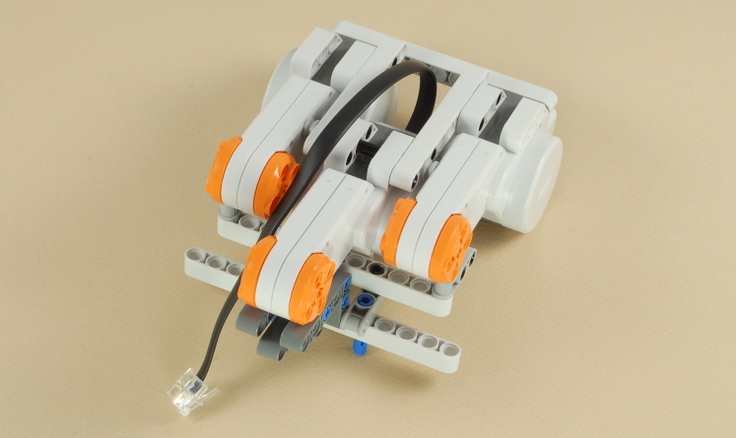
 | 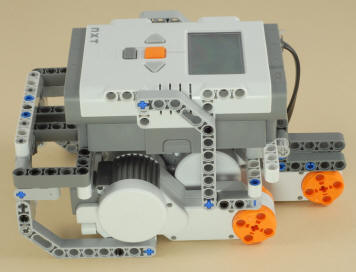 |

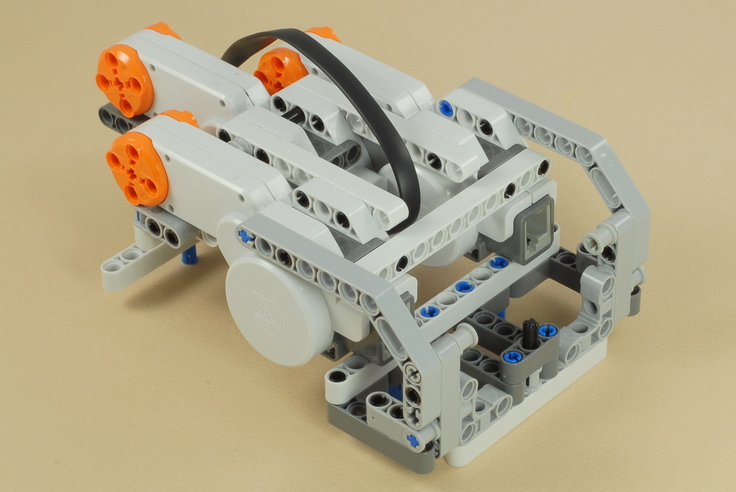
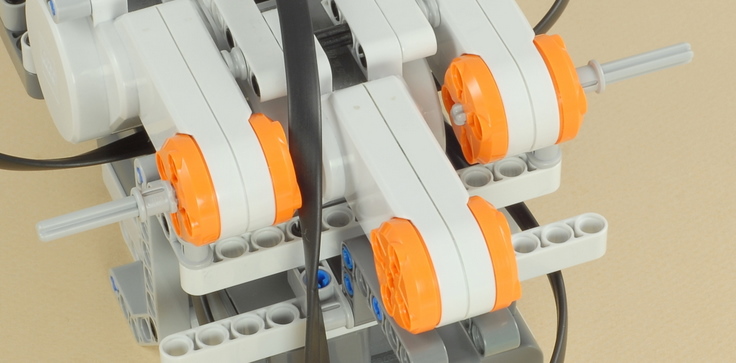
Используйте два средних провода (по 35 см каждый) для подключения двух серводвигателей к портам В и С контроллера NXT. Провода прокладываем крест на крест под блоком NXT, чтобы провода не мешали. Соедините провода так, чтобы порт B соединен с двигателем на стороне B, и порт С был соединен с двигателем на стороне C. Вытяните провод подальше от двигателя - ближе к центру.
 |  |

 |  |
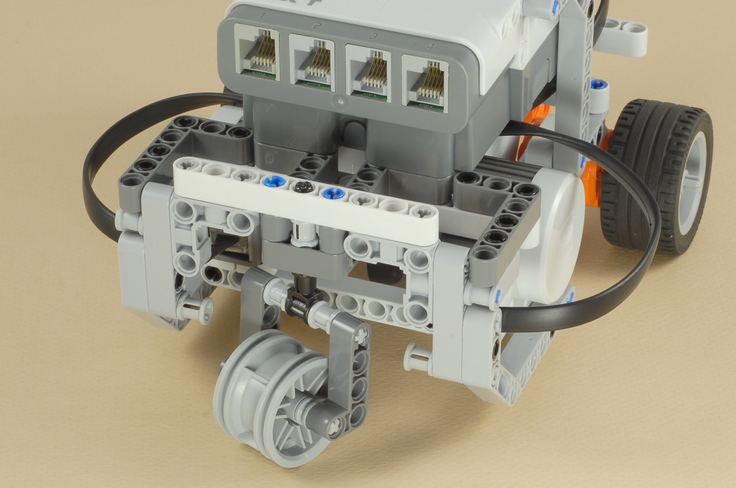
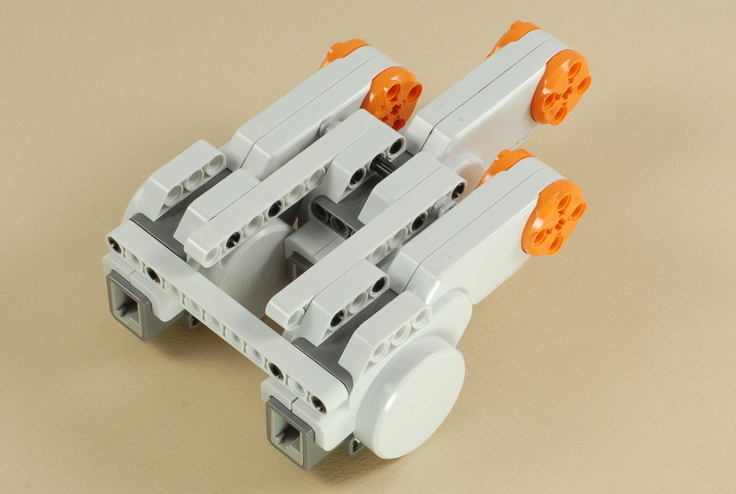
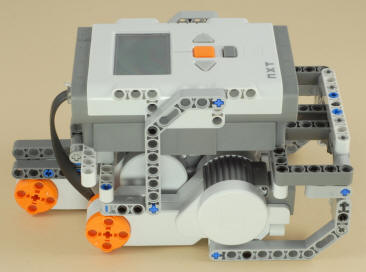
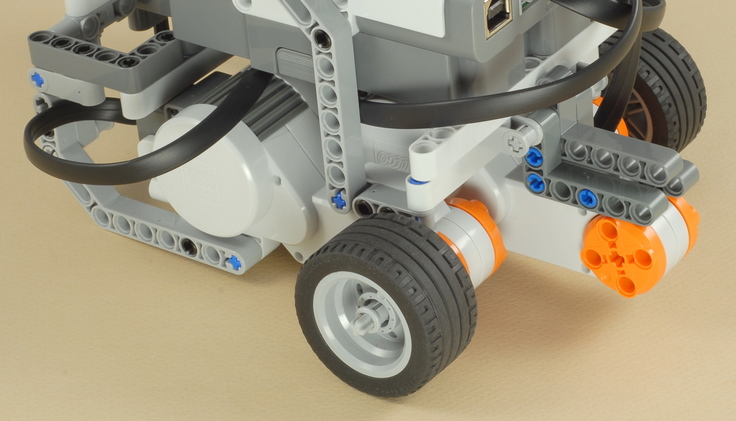
Этот базовый робот прост в настройке и использовании и может быть использован в качестве базы для других проектов. Третий двигатель на низком уровне в передней (или задней части) робота может быть использован для крепления дополнительных механизмов. Обратите внимание, что Вы можете управлять роботом в любом направлении.
Для начала об основных вождения, вот несколько программ, которые демонстрируют использование Перемещение блока делать различные виды поворотов.
Первая простая программа показывает три вида движения с помощью "БЛОКА ДВИЖЕНИЕ":
Вторая спиральная программа более сложная и демонстрирует использование параметра "Руководящий" блока движения. Блок перемещения управляет количеством поворотов. Это заставляет робота ехать по спирали, регулируя ридиус поворота.
Один из вариантов конструкции - добавление блокировочного моста, который предотвращает поворот третьего колеса. Даннай вариант конструкции хорош для полов с гладким покрытием: линолеум, паркет, ламинат. Но не подходит для ковровых покрытий. Для них не рекомендуется использовать блокирующий мост.

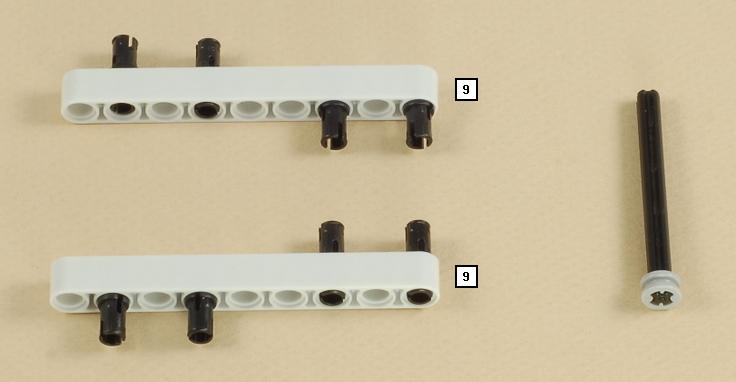
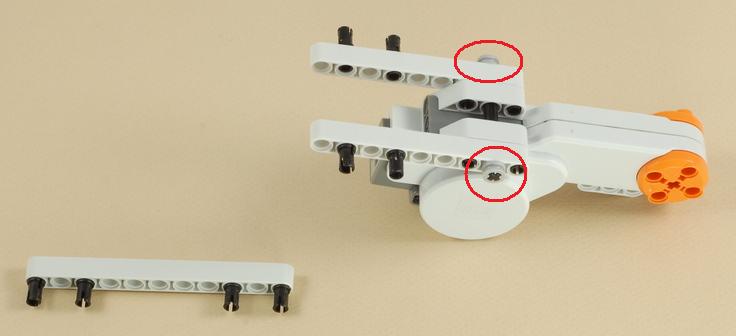
Частично разобрать одну сторону колеса для того, чтобы вставить 9-ячеистый мост через колесо в положение, показанное ниже, а затем собрать его.
Попробуйте написать такую программу, чтобы робот двигался вперёд и поворачивал. Можете ли вы создать программу так, чтобы робот следовал по заранее определенному путь прямо и частично поворачивал в определённых местах. Используйте «блок Движение" с двигателями установлен в В и С.
Экспериментируйте с двумя различными вариациями третьего колеса: без моста с возможностью поворачивать в любом направлении и и блокированным для поворотов колеса на различных поверхностях пола. Какое покрытие оказывается хуже для выполнения задачи, а на какой робот поворачивает и ведёт себя точнее?
Попробуйте добавить дополнительный механизм к третьему двигателю, или просто прикрепите своё дополнение к роботу.
Попробуйте добавить какие-либо датчики к роботу. Например, можно добавить датчик касания. И запрограммировать робота так, чтобы при нажатии кнопки он останавливался. Или добавить ультразвуковой датчик, и запрограммировать робота так, тобы тот остановился перед стеной (при наличии препятствия перед ним).
Ребенок мечтает сделать робота из ЛЕГО? Есть старые конструкторы, а не специализированный Mindstorms? Статья поможет найти новые идеи, вдохнуть новую жизнь в старые пластмассовые детали, сделать своими руками автоматическое устройство.

Как сделать из ЛЕГО робота. Youtube piotrek839
Каких роботов можно сделать из ЛЕГО?
Используя пластмассовые кубики, можно создать множество разных конструкций. Даже Терминатора.
Когда речь заходит о том, чтобы самостоятельно построить робота из ЛЕГО, помните об ожиданиях. Создать Терминатора мечтают многие, но не забывайте о ресурсах. Это и наличие деталей, и терпение, и желание идти до конца :-).
Робот-киборг из ЛЕГО может выглядеть по-другому:
В интернете множество видео с роботами из LEGO. И c созданными из специализированных робототехнических конструкторов, и из деталей других наборов.
Робот или не робот?
Конечно дело не в размере и количестве использованных ЛЕГО-кирпичиков. Маленький робот с интересными функциями удивит ребенка не меньше, чем громила, если он будет … «умным».
В робототехнических конструкторах помимо деталей для сборки корпуса и механизмов робота есть контроллер (мини-компьютер), датчики и двигатели и программное обеспечение.

Программируемый блок EV3 и датчики LEGO Mindstorms
С этими компонентами ребенок соберет робота, а не внешне похожую на него игрушку. Используя сенсоры и программируемый блок, можно реализовать принципы обратной связи, наделить конструкцию из LEGO «интеллектом».
Детали для сборки робота из ЛЕГО
Что же делать если у вас масса LEGO-деталей и непреодолимое желание построить из них робота? Очевидное решение — купить контроллер LEGO EV3 — слишком дорого, т.к. стоимость приближается к цене нового набора LEGO Mindstorms. Приобрести контроллер и датчики других производителей целесообразнее.
Бюджетный вариант — использовать Arduino. Эта недорогая плата станет «мозгом» создаваемого легоробота, позволит подключить сенсоры и двигателей разных производителей, реализовать идеи и развить проект самодельного робота. Платформа Arduino популярна и научиться работать с ней можно и в кружках, и самостоятельно, используя онлайн-ресурсы. При разработке робота из ЛЕГО с использованием Arduino необходимо решить, как крепить конструктивно несовместимые контроллер и датчики. Например, сделать из деталей LEGO корпусы для электроники.


Крепления электронных компонентов к элементам конструктора LEGO можно создать с помощью 3D-печати.

Держатель для сервопривода, изготовленный с использованием 3D-печати. blog.arduino.cc
Примеры роботов, сделанных из LEGO
ArGo — робот-автомобиль из конструктора Lego Technic и Arduino:

Подробнее об этом проекте здесь.
Робот-танк из деталей Lego с arduino на борту, который управляется по Wi-Fi:
Подробнее об этом проекте здесь.
Шестиногий шагающий робот-жук, сделанный из LEGO и платы Arduino. Крепления сервомоторов, рычаги, насадки на ноги и крепление Arduino к LEGO распечатаны на 3D принтере.
Сделали классного робота? Добавьте его в наш каталог проектов! Расскажите о своих успехах читателям Занимательной робототехники.
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Робот-марионетка позволит общаться на расстоянии

Роботы, роботы, роботы…
Представьте себе ситуацию, если бы структурные элементы игрушки Lego, либо другого подобного конструктора могли вести себя по-разумному. То есть, собирались бы самостояте.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

Читайте также: