
Как сделать руку манипулятор из лего
Обновлено: 22.04.2024
Занимаясь на спецкурсе «Конструирование» мне приходилось собирать разные модели из конструктора Лего, но модель манипулятора я не собирал. За последнее время появилось много видеороликов про такие устройства, можно увидеть, как они устроены и как работают. Но всегда интереснее увидеть работу такого устройства вживую, поэтому я решил собрать эту модель.
Актуальность темы.
На уроках технологии в 7 классе при изучении технологических систем рассматривают разные механизмы и электротехнические устройства, в том числе на примере манипулятора. Этот материал подробно изложен в учебниках, при выполнении заданий учащиеся пользуются теоретической информацией. Если построить модель манипулятора, то урок будет проходить интереснее и более наглядно.
Постановка проблемы.
Хотелось, чтобы для проведения уроков технологии по изучению механизмов и электротехнических устройств в технологических системах использовалась рабочая модель манипулятора, но в настоящее время такой модели нет.
Цель проекта.
Разработать и построить действующую модель манипулятора в форме руки из конструктора Лего на основе микропроцессора EV–3.
План работы над проектом.
- Проанализировать существующие решения.
- Составить техническое задание на проектирование.
- Разработать и описать конструкцию манипулятора.
- Написать программу управления конструкцией.
- Протестировать модель.
- Оценить получившиеся результаты.
I. Исследование по проблеме.
1.1 Анализ существующих решений.
Манипулятор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века , благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.


Рисунок 1. Манипулятор в металлургии
Кран-манипулятор — кран стрелового типа, установленный на автомобильном шасси и служащий для его загрузки и разгрузки одиночными и сыпучими грузами в контейнерах и их транспортировки.

Рисунок 2. Передвижной кран-манипулятор
Для людей с ампутированной конечностью существует Бионический протез.
Bebionic —биоэлектрическая искусственная кисть с приводом электромеханическим и микропроцессорным контролем, созданная для восстановления функции ампутированной конечности.

Рисунок 3. Бионический протез
Принцип действия бионического протеза:
После травмы или в ходе болезни конечность ампутируют. Оставшаяся культя состоит из множества тканей: кожи, мышц, костей, сосудов и нервов. Хирург во время операции выводит сохранившийся двигательный нерв на остающуюся крупную мышцу. После заживления операционной раны нерв может передавать двигательный сигнал. Этот сигнал воспринимает датчик, установленный на протезе. В процессе восприятия нервного импульса участвует сложная компьютерная программа.
Минусы такого протеза:
У такого протеза единственный минус. Это его стоимость.Стоимость бионического протезирования пока высока и может достигать в сложных случаях миллионов рублей. Однако возврат к полноценной жизни трудно оценить в материальном исчислении. По сути, установка бионических протезов – единственная возможность для инвалида вернуться к нормальной жизни: строить и осуществлять планы, содержать семью, добиваться карьерных вершин.
NiryoOne – это 6-осевой манипулятор, созданный специально для производителей, системы обучения и небольших компаний. Согласно Niryo, имеющий шесть осей перемещения манипулятор позволяет выполнять задачи, которые до сих пор были доступны исключительно промышленным роботам. Манипулятор может выбрать и положить на место предметы с помощью вакуумного насоса, захвата или электромагнита. Он поможет автоматизировать 3D-принтер, позволит сверлить отверстия в изделиях. Он может выполнять необходимые домашние работы и даже творчески развлекать детей.

Рисунок 4. Манипулятор серии NiryoOne
Минусом такого манипулятора является его большая стоимость, его можно приобрести за сумму 20000 – 200000 долларов.
1.2 Техническое задание на проектирование.
Проведя анализ существующих манипуляторов, делаем вывод, что форма устройства напоминает руку человека, движения осуществляются с помощью механизмов, таких как рычаг, зубчатые передачи.
Необходимо спроектировать и собрать механическую руку из конструктора ЛЕГО. Манипулятор должен захватывать предметы и перемещать их в нужное место. Для обеспечения автоматической работы устройства необходимо программное обеспечение.
II. Практическое решение проблемы.
2.1 Разработка и описание конструкции манипулятора.
1 ) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.

2) После сборки основания создаем саму руку. Для того, чтобы рука могла подниматься или опускаться, ставим на конструкцию руки Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом и датчиком цвета, для того чтобы рука поднималось на определенную высоту.

3) После сборки конструкции руки нужно собрать захватывающий механизм из Среднего Сервомотора Lego MINDSTORMS EV3, с зубчатым механизмом выполняющий роль пальцев.




4 ) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.

2.2 Разработка и описание ПО.
Прежде чем приступать к составлению компьютерной программы, необходимо составить логическую последовательность действий манипулятора.
Сомкнуть захват, захватив предмет.
Повернуть манипулятор на определенный угол.
Повернуть манипулятор в исходное положение.
Повторить программу необходимое число раз.
В системе ПО записывается подпрограмма для калибровки и синхронизации моторов:

Затем записываем основную программу. Для этого мы должны в программе запрограммировать две кнопки, при нажатии одной из них рука повернулась в определенную сторону, в зависимости от того, где находится предмет:

Потом мы должны запрограммировать средний и большой сервомотор, находящиеся на конструкции руки для того, чтобы рука опустилась с помощью большого сервомотора и захватила предмет с помощью среднего сервомотора:

После того, как рука захватила предмет, мы записываем в программе для большого сервомотора на основании программу для возращения руки в то же положение, в котором она была изначальна. И для среднего, и большого сервомотора находящиеся на конструкции руки мы записываем программу для того, чтобы рука опустилась и отпустила предмет:

1.Оценка проекта.
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует техническому заданию на проектирование. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, затем поворачивается на заданный угол, опускает предмет и раскрывает захват, долее поднимается и возвращается в исходное положение. Работа манипулятора выполняется по заданной программе.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии в 7 классе при изучении механизмов и электротехнических устройств в технологических систем.
Работая над этим проектом, мне потребовались такие умения, как: находить и обрабатывать информацию, читать схемы, чертежи, моделировать и конструировать устройства из конструктора Лего, составлять компьютерную программу, используя язык объектно-ориентированного программирования, работать с текстовым редактором, создавать презентацию в приложении Power point.
Открываю новый раздел сайта по робототехнике — Lego WeDo 2. В ближайшее время (надеюсь получится в новогодние праздники) статья пополниться большим количеством инструкций по сборке моделей из Лего. Отличительной особенностью наборов Lego 45300 второго поколения является возможность работы через bluetooth и применение нескольких моторов одновременно!…
Пушка из Lego 9580 (Урок 3, программа: Военная техника)

На третьем уроке цикла: Военная техника вернемся в стародавние времена и прикоснемся к истории создания первой пушки.Орудие в течение нескольких веков применялось для осады и разрушения стен замков и цитаделей, мостов и переправ и в итоге эволюционировало в артиллерию. В Lego инструкции дети соберут не…
Робот Лего Ведо (Урок 5, программа: Космос)

Роботы плотно вошли в человеческую жизнь и наверняка робототехника в будущем начнет занимать еще большее место в судьбе человека. На пятом уроке по Lego WeDo учитель вместе с детьми отправится в будущее и помечтает о роботизированном мире. Роботы Лего Ведо несложно собираются и с задачей…
Лего Луноход (Урок 4, программа: Космос)

На этом уроке lego робототехники дети соберут первую самостоятельную модель робота, которая за счет датчиков будет руководить собственным движением. Лего луноход вернет учеников в прошлое и напомнит о великой стране и ученных работающих не ради денег, а ради мечты и идеи. И так начнем! История…
Манипулятор Лего (Урок 3, программа: Космос)
На третьем уроке программы Космос дети будут создавать космическую руку манипулятор из лего. Ученики уже запустили первый спутник, полетали на звездолете через пояс астероидов и узнали много полезной информации о Вселенной! На новом уроке по робототехнике разговор пойдет о технических работах вне космического корабля. Человек…
Второй урок Lego Wedo 9580 — Полет сквозь пояс астероидов (Урок 2, программа: Космос)

Для второго урока из цикла «Космос» разработана программа lego wedo 9580 — Полет сквозь пояс астероидов. Занятие потребует от учителя небольшой подготовки, а у детей оно вызовет восторг и заинтересованность робототехникой! Как вы помните на первом уроке по сборке Первого спутника Земли (перейти к уроку)…
Wedo инструкция сборки животных из наборов Lego 9580 и 9585
Wedo инструкции предыдущих учебных материалов по робототехнике Lego про Космос (изучить рабочую программу) и Военную технику (ознакомиться со схемами сборки) получились интересными для детей и познавательными. Следующей рабочей программой для базовых наборов Lego 9580 и 9585 стал цикл — Животные Мира. Среди многообразия схем сборки,…
App Inventor — описание математического блока Math

Новый материал по детскому программированию расскажет про работу с встроенными блоками в app inventor. Описание математической логики программы откроет новый цикл лекций. Вскоре появятся обучающие статьи по следующим направлениям: управление, логика, текст, массивы, цвета, переменные и процедуры. Ну а пока вернемся к математике и рассмотрим,…
Смена фона в Скретч
В новой статье я помогу юным программиста разобраться в блочном коде отвечающем за смену фона в зависимости от положения спрайта — изменение локации персонажа. Если вы впервые на сайте и ищите код scratch для плавного движения фона -скроллинга, то перейдите в предыдущий материал — Scrolling…
Как сделать скроллинг в скретч ?
![]()
Новая тема по детскому программированию будет посвящена движению спрайта за счет плавной смены заднего фона — иначе говоря скроллинг в скретч по координатам Х. Создание каждой компьютерной игры потребует от юного программиста уметь пользоваться рассматриваемым программным кодом и понимать принципы взаимодействия спрайтов при использовании этого…
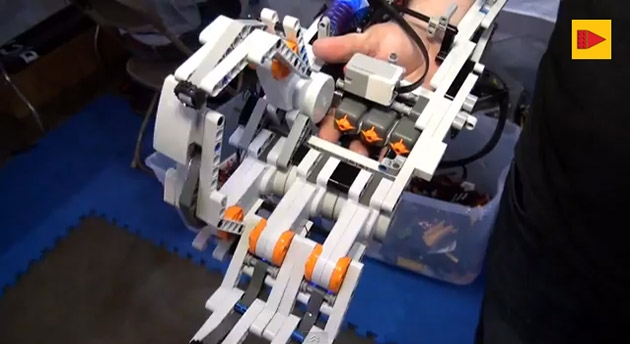
Конструктор ЛЕГО находка для любого юного избретателя. Можно сборать что угодно. Вот, например, умельцы собирают роботизированные руки из разных наборов. Читайте статью и смотрите видео. Вот молодцы!
Роботизированная рука из набора LEGO EV3
Как Вы видите рука построена на базе 3-х контроллерах EV3. Мы нашли программу, которую можно загрузить в блок lego mindstorms для запуска в действие этого огромного роботизированного устройства:
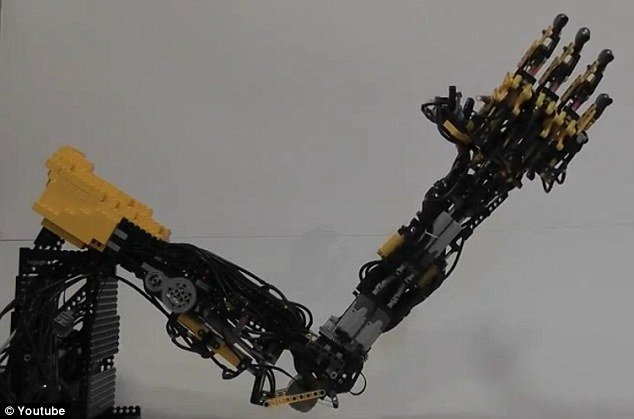
Роботизированная рука, сделанная из самых современных материалов методом 3D-печати, вызывает восхищение сконструировавшими её учёными. А вот аналогичная рука, основой для которой послужил конструктор LEGO, больше ориентирована на развлекательную и юмористическую составляющие, хотя и способна выполнять базовый набор действий и движений.
Автором необычного творения, состоящего из деталей конструктора, стал Диаво Вольтажио (Diavo Voltaggio). Правда, в качестве материала им были использованы не части из LEGO-игрушек, которые можно приобрести в «Детском мире», а фирменный набор для инженеров-энтузиастов под названием LEGO Mindstorms EV3. Такие наборы весьма популярны у любителей создавать простые роботизированные механизмы собственными силами.
Автор назвал своё детище киборг-конечностью «Mark VI». Индекс в наименовании был выбран не случайно. По счёту это уже шестая модель роботизированной руки, которую господин Вольтажио изготовил за последний год. Логично предположить, что именно проект Mark VI является самым совершенным с технической точки зрения — более крепким и надёжным, чем прежние искусственные LEGO-руки, но, в то же время, гораздо тяжелее из-за большей массы аккумулятора и дополнительных приспособлений привода.
Конструкция созданного манипулятора отличается простотой и надёжностью. Здесь имеется всего четыре кнопки, каждая из которых запускает один из четырёх моторов, управляющих роботизированными пальцами. Контроль за механической рукой происходит следующим образом: при нажатии на кнопку отправляется команда на сгиб соответствующего пальца, а как только кнопка отпускается — палец тут же возвращается в исходное положение.
Труд Диаво Вольтажио не остался без внимания, и автор удостоился первого места за своё изобретение, продемонстрированное на выставке BrickFair LEGO Convention. В ближайшее время автор роботизированной руки приступит к проектированию седьмой версии устройства.
Роботизированную руку сделали из Lego technics
Конструктор Lego долгое время считался детской игрушкой. Однако один из пользователей YouTube доказал, что из элементов Lego можно изготавливать довольно сложные механизмы, например, руку для робота. Созданная роботизированная рука может делать те же движения, что и человеческая, но с гораздо меньшей скоростью.
Пальцы руки могут сгибаться независимо друг от друга, а кисть вращаться благодаря пневматике Lego. Рука способна захватывать предметы, правда, их вес не должен превышать несколько сотен граммов. Конечность также имеет функциональный локтевой сустав. Все движения руки управляются при помощи джойстиков, сообщает Daily Mail.
-
Роботы Японии » Разные японские роботы
Раскраска-роботы » Мультяшные роботы
Робот-помощник от Honda » Человекоподобные роботы
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Картонный робот достиг всех целей не без добрых людей

Инвалидная коляска управляется языком
система позволяет управлять коляской в три раза быстрее, чем существующие ныне аналоги, которые управляются дыханием. Большую скорость сами исследователи связывают с тем.
Рубрика: Робот LEGO MINDSTORMS EV3 и NXT инструкции
На первой странице мы с Вами познакомимся с внешним видом конструкторов lego mindstoms ev3 и инструкциями (інструкциї lego) на русском языке для них.
Сейчас доступны к скачиванию статьи с готовыми пошаговыми инструкциями по сборке различных моделей роботов из конструктора лего ев3 версии 313313 и 45544 (робот lego mindstorms ev3).
Руководство пользователя (EV3 Home) для домашней версии, артикул 31313 - инструкция на русском языке для lego mindstorms ev3.
Элементная база (из каких деталей состоит набор), как выглядит содержимое коробки лего 31313.
Базовый набор LEGO MINDSTORMS Education EV3 (артикул 45544).
Версия набора - образовательная (для школ).
Элементная база набора.
Инструкция lego mindstorms ev3:
руководство пользователя (EV3 education) для учебной версии, артикул 45544.
лего EVO 3 презентация pptx с описанием и возможностями набора.
Имеются две модификации: HOME и EDUCATIONS (Домашняя и образовательные версии). Каждая версия имеет свои особенности. Но в каждой можно собрать отличные модели роботов из лего! Домашняя попроще и подешевле, а образовательная версия с лицензионным ПО LABVIEW для рабочей группы от NATIONAL INSTRUMENS, естественно, подороже.
Купить набор в Зеленогорске (Красноярский край) можно в компании "Компас". Скачивайте, ознакамливайтесь с ПО, внешним видом и способом соединения, настройки и программирования новой модели от лего!
Робота можно использовать для соревнования "Шорт трек" категории "Hello, robot!". Инструкция (презентация) содержится 45 слайдов, многие слайды являются повторами с разных углов обзора.
Возраст обучающихся: 4 – 8 классы. УМК любой. Презентация выполнена при помощи ПО Lego Digital Designer ver.4.3.:
полная инструкция по сборке в pptx
Бонусные модели 6 роботов EV3 на одной платформе (6 роботов в 1):

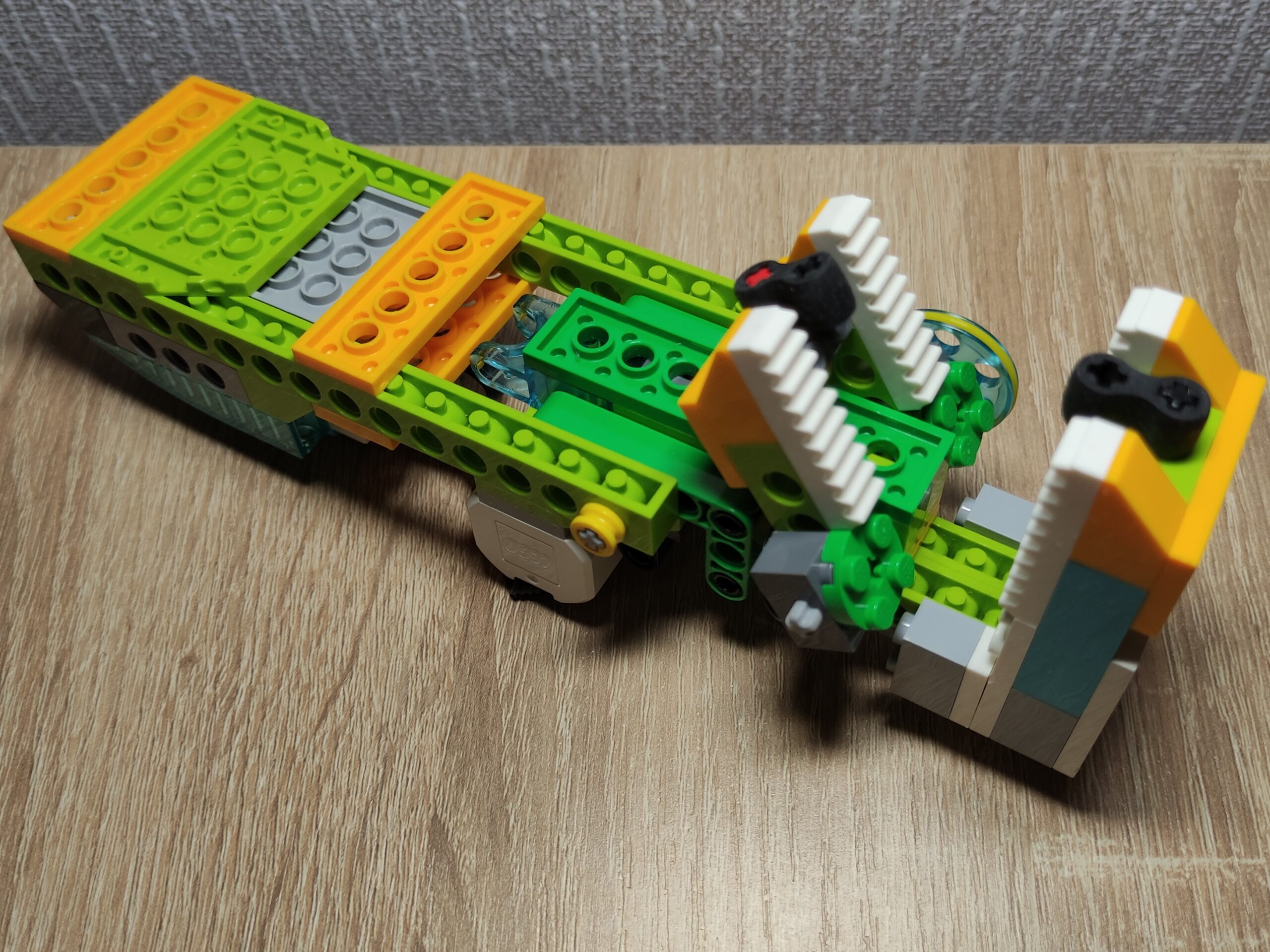
Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Робо-рука». Сборка состоит из 86 деталей и 63 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена примерная управляющая программа.
По нашей старой традиции, каждую неделю мы выкладываем новую схему сборки из конструктора Lego WeDo 2.0. И вот наша новая модель, связанная на прямую с робототехникой и роботами, робо-рука. На нашем Youtube канале RobboBank, вы можете увидеть как мы собирали данную модель.
Схема модели «Робо-рука» очень проста, сложности нет, от слова ВООБЩЕ. Все шаги прорисованы от и до. Подойдет как школьникам, так и дошколятам. А вот с зданиями, которые нами были предложены после сборки модели, под силу только детям старше 9 лет, хотя, гении есть везде…
Что должно получиться в итоге:
Какие программные блоки WeDo 2.0 мы использовали в программе:
- блок запуска
- блок времени
- блок направления движения мотора
- блок звука
- цикл
Для сборки модели «Робо-рука» по инструкции виду 2.0 нам понадобится всего один набор LEGO Education. Также, после сборки моделей учеников ждут практические задания по программированию.
Задания виду 2.0:
1) Ребятам нужно будет добавить в управляющую программу звуковой блок, пусть, перед тем, как робо-рука осуществит захват, будет какой-нибудь уведомительный сигнал.
2) Ученикам нужно будет изменить конструкцию робо-руки, добавив в нее, а также в управляющую программу, датчик наклона. Сейчас захват осуществляется автоматически, но теперь вы будете сами решать, захватить деталь или отпустить ее.
Все детали входят в конструктор WeDo 2.0. Схема создана в программе Studio 2.0 , но представлена в презентации. Это сделано для большего удобства учителя. Презентацию можно показать в любом классе, в отличие от программы.
Совершенно готовая схема сборки Wedo 2.0 для показа на уроке детям по дополнительному образованию.
Все материалы проверены. Ошибок и вирусов нет.
Напоминаем, что скачать готовую пошаговую инструкцию по сборке для набора LEGO® Education WeDo 2.0 «Роборука» вы сможете после нажатия на кнопку скачать и просмотра рекламы. За счет рекламы живет наш сайт. Спасибо за понимание!
Читайте также: