Как собрать машину из лего mindstorms
Обновлено: 09.05.2024
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.


Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.


Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Для управления машиной я воспользовался приложением EV3 Numeric Pad (см. картинку ниже). Приложение позволяет сделать управление по своему алгоритму. Вот какие шаги нужно выполнить, чтобы управлять этой гоночной машиной с помощью EV3 Numeric Pad:
- Запустить приложение EV3 Numeric Pad и подключите его через Bluetooth к EV3.
- Запустите демонстрационную программу на EV3 (перед запуском обязательно установите передние колёса прямо).
- Можно управлять.
Принцип работы приложения EV3 Numeric Pad следующий: когда вы касаетесь голубого прямоугольника и водите по нему пальцем, вы тем самым передвигаете по нему красную мишень. В это время приложение постоянно передаёт координаты мишени (по осям X и Y) модулю EV3. Координата по оси X – передаётся в диапазоне от -100 до 100 в почтовый ящик с именем «x», а координата по оси Y – тоже передаётся в диапазоне от -100 до 100, но в почтовый ящик с именем «y» (слева сверху отображаются текущие числа переданные EV3).
![Приложение EV3 Numeric Pad]()
Демонстрационная программа racing-car.ev3, которую вы можете скачать ниже, считывает координаты из ящиков «x» и «y» и преобразует следующим образом: координата по оси X преобразуется в повороты передних колёс вправо и влево, а координата по оси Y преобразуется в скорость вращения задних колёс. Как только вы отрываете палец от экрана, красная мишень возвращается в центр голубого поля, модулю EV3 передаются координаты 0, 0 и, соответственно, передние колёса возвращаются в прямое положение, и задние колёса останавливаются.
Нижняя полоска работает аналогично верхнему квадратному полю, но она передаёт значения от -100 до 100 в почтовый ящик с именем «z». Если вы прикоснётесь здесь пальцем слева или справа от центра, то демонстрационная программа заставит машину посигналить.
Вместо программы EV3 Numeric Pad вы можете использовать её более продвинутый аналог EV3 Numeric Pad+ (см. картинку ниже), в которой есть ещё 4 дополнительные кнопки, по нажатию на которые, вы можете запрограммировать дополнительные действия. Номера нажатых кнопок будут приходить в почтовый ящик с именем «w». Вот что вы можете попробовать запрограммировать сами при нажатии на дополнительные кнопки:
- Помощь водителю при развороте: после нажатия на кнопку, машина самостоятельно совершает разворот на 180 градусов, попеременно двигаясь вперёд-назад и поворачивая руль то влево, то вправо.
- Помощь водителю при парковке: устанавливаем машину рядом с местом, куда нужно парковаться, нажимаем запрограммированную кнопку, и машина сама паркуется.
- Сигнализация: установка и снятие с охраны - пока машина на охране она не может ехать, а при обнаружении препятствия рядом с датчиком расстояния включается сирена и начинает мигать красным светом светодиод. Ещё можно подключить гироскоп и с помощью него определять, что машина под охраной стоит неподвижно, а как только машину кто-нибудь двигает, тоже включать тревогу.
![Приложение EV3 Numeric Pad+]()
Помимо того, что в программе EV3 Numeric Pad+ есть дополнительные кнопки, здесь можно выбирать между двумя вариантами имён почтовых ящиков. Это могут быть ящики с именами «w», «x», «y» и «z» (по умолчанию) или «a», «b», «c» и «d». Т.е. вы сможете запрограммировать сразу два пульта в одном.
Инструкция для сборки гоночной машины формула 1 из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
Демонстрационная программа для гоночной машины формула 1, собранной из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Кроме первой версии машины вы можете сделать версию машины с увеличенной скоростью движения. В скоростной версии добавлены шестерёнки, благодаря которым машина потеряет в мощности, но сможет ехать в 5 раз быстрее. Разница при сборке только в креплении задних колёс (различаются шаги 18, 24, 25 и 26, а шаг 29 превращается в шаги 29 – 35 в скоростной версии). Для этой версии нужно использовать другую демонстрационную программу.
![Гоночная машина формула 1 (скоростная версия)]()
Инструкция для сборки гоночной машины формула 1 (скоростная версия) из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
Демонстрационная программа для гоночной машины формула 1 (скоростная версия), собранной из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления гоночной машиной показан на этом видео:
![Звезда активна]()
![Звезда активна]()
![Звезда активна]()
![Звезда активна]()
![Звезда не активна]()
Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.
![Гоночная машина формула 1 EV3]()
Для управления машиной я воспользовался приложением EV3 Numeric Pad (см. картинку ниже). Приложение позволяет сделать управление по своему алгоритму. Вот какие шаги нужно выполнить, чтобы управлять этой гоночной машиной с помощью EV3 Numeric Pad:
- Запустить приложение EV3 Numeric Pad и подключите его через Bluetooth к EV3.
- Запустите демонстрационную программу на EV3 (перед запуском обязательно установите передние колёса прямо).
- Можно управлять.
Принцип работы приложения EV3 Numeric Pad следующий: когда вы касаетесь голубого прямоугольника и водите по нему пальцем, вы тем самым передвигаете по нему красную мишень. В это время приложение постоянно передаёт координаты мишени (по осям X и Y) модулю EV3. Координата по оси X – передаётся в диапазоне от -100 до 100 в почтовый ящик с именем «x», а координата по оси Y – тоже передаётся в диапазоне от -100 до 100, но в почтовый ящик с именем «y» (слева сверху отображаются текущие числа переданные EV3).
![Приложение EV3 Numeric Pad]()
Демонстрационная программа racing-car.ev3, которую вы можете скачать ниже, считывает координаты из ящиков «x» и «y» и преобразует следующим образом: координата по оси X преобразуется в повороты передних колёс вправо и влево, а координата по оси Y преобразуется в скорость вращения задних колёс. Как только вы отрываете палец от экрана, красная мишень возвращается в центр голубого поля, модулю EV3 передаются координаты 0, 0 и, соответственно, передние колёса возвращаются в прямое положение, и задние колёса останавливаются.
Нижняя полоска работает аналогично верхнему квадратному полю, но она передаёт значения от -100 до 100 в почтовый ящик с именем «z». Если вы прикоснётесь здесь пальцем слева или справа от центра, то демонстрационная программа заставит машину посигналить.
Вместо программы EV3 Numeric Pad вы можете использовать её более продвинутый аналог EV3 Numeric Pad+ (см. картинку ниже), в которой есть ещё 4 дополнительные кнопки, по нажатию на которые, вы можете запрограммировать дополнительные действия. Номера нажатых кнопок будут приходить в почтовый ящик с именем «w». Вот что вы можете попробовать запрограммировать сами при нажатии на дополнительные кнопки:
- Помощь водителю при развороте: после нажатия на кнопку, машина самостоятельно совершает разворот на 180 градусов, попеременно двигаясь вперёд-назад и поворачивая руль то влево, то вправо.
- Помощь водителю при парковке: устанавливаем машину рядом с местом, куда нужно парковаться, нажимаем запрограммированную кнопку, и машина сама паркуется.
- Сигнализация: установка и снятие с охраны - пока машина на охране она не может ехать, а при обнаружении препятствия рядом с датчиком расстояния включается сирена и начинает мигать красным светом светодиод. Ещё можно подключить гироскоп и с помощью него определять, что машина под охраной стоит неподвижно, а как только машину кто-нибудь двигает, тоже включать тревогу.
![Приложение EV3 Numeric Pad+]()
Помимо того, что в программе EV3 Numeric Pad+ есть дополнительные кнопки, здесь можно выбирать между двумя вариантами имён почтовых ящиков. Это могут быть ящики с именами «w», «x», «y» и «z» (по умолчанию) или «a», «b», «c» и «d». Т.е. вы сможете запрограммировать сразу два пульта в одном.
Инструкция для сборки гоночной машины формула 1 из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
Демонстрационная программа для гоночной машины формула 1, собранной из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Кроме первой версии машины вы можете сделать версию машины с увеличенной скоростью движения. В скоростной версии добавлены шестерёнки, благодаря которым машина потеряет в мощности, но сможет ехать в 5 раз быстрее. Разница при сборке только в креплении задних колёс (различаются шаги 18, 24, 25 и 26, а шаг 29 превращается в шаги 29 – 35 в скоростной версии). Для этой версии нужно использовать другую демонстрационную программу.
![Гоночная машина формула 1 (скоростная версия)]()
Инструкция для сборки гоночной машины формула 1 (скоростная версия) из базового образовательного набора конструктора LEGO Mindstorms Education EV3 (45544).
Демонстрационная программа для гоночной машины формула 1 (скоростная версия), собранной из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления гоночной машиной показан на этом видео:
Разработайте беспилотное транспортное средство, которое могло бы выполнять команды пользователя.
![roaming-vehicles-gps]()
План урока
Подготовка
— Ознакомьтесь с материалами для учителя.
— Если необходимо, разработайте план урока, используя материалы для начала работы в программе «Лаборатория EV3» или приложении для программирования EV3. Это поможет познакомить учащихся с решениями LEGO ® MINDSTORMS ® Education EV3.Объяснение (30 мин.)
— Дайте учащимся задание придумать несколько прототипов.
— Предложите им найти новые конструкторские и программные решения.
— Попросите каждую пару учащихся собрать и испытать два решения.Объяснение (60 мин.)
— Попросите учащихся протестировать свои решения и выбрать лучшее из них.
— Убедитесь, что они могут подготовить свои таблицы результатов испытаний.
— Дайте каждой команде немного времени, чтобы завершить свой проект; затем соберите материалы, в которых они зафиксировали результаты своей работы.Дополнение (60 мин.)
— Дайте учащимся немного времени, чтобы подготовить итоговые отчёты.
— Проведите обсуждение, в ходе которого каждая группа расскажет о результатах своей работы.Оценка
— Дайте оценку работе каждого учащегося.
— Для упрощения этой задачи вы можете использовать раздел оценки.Начало обсуждения
Существует множество навигационных систем, используемых в автомобилях. Некоторые из этих систем берут на себя некоторые обязанности водителя по благополучной доставке пассажиров к месту назначения. Прежде чем определить оптимальный маршрут из точки А в точку В, беспилотные автомобили должны научиться выполнять некоторые манёвры, предварительно запрограммированные пользователем.
![roaming-vehicles-gps]()
Поощряйте активное обсуждение идей.
Предложите учащимся ответить на следующие вопросы.- Что представляют собой беспилотные автомобили и как они работают?
- Откуда беспилотные автомобили получают информацию о месте назначения?
- Какие манёвры должны выполнять беспилотные автомобили, чтобы безопасно передвигаться по городским улицам в северном, южном, восточном и западном направлениях?
Попросите учащихся задокументировать возникающие идеи и объяснить, почему они выбрали то или иное решение для создания своего первого прототипа. Попросите их описать, каким образом они будут оценивать свои идеи в процессе выполнения данного проекта. В процессе рассмотрения и повторения учащиеся получат определённую информацию, которую смогут использовать для оценки эффективности своих решений.
Псевдокод — великолепный инструмент, который поможет учащимся привести в порядок свои мысли перед началом программирования.
Советы по сборке
Начните со сборки транспортного средства. Учащиеся могут использовать любую предлагаемую Приводную платформу LEGO ® MINDSTORMS ® EV3 или собрать свою собственную. Необходимо обеспечить свободный доступ ко всем кнопкам, расположенным в верхней части EV3. Они потребуются для выбора направления в процессе выполнения данного задания.
![ev3-robot-driving-base]()
Советы по программированию
Объясните учащимся, что им будет необходимо запрограммировать своего робота так, чтобы он мог двигаться в соответствии с записанным набором инструкций, передаваемых ему с помощью кнопок на EV3. Используйте следующие инструкции.
- Нажата кнопка «Вверх» — робот перемещается на 30 см вперёд.
- Нажата кнопка «Вниз» — робот перемещается на 30 см назад.
- Нажата кнопка «Влево» — робот поворачивает на 90 градусов влево.
- Нажата кнопка «Вправо» — робот поворачивает на 90 градусов вправо.
Запись одного движения робота
Описание программы
Запись нескольких движений робота
Для хранения последовательности данных используется блок «Операции над массивом». Этот блок в большинстве случаев описывают как таблицу с одной строкой и несколькими столбцами.
1. Создать новую программу.
2. Создать блок переменных «Вождение». Выбрать функцию «Запись в числовой массив».
3. Создать цикл. В данном примере программы цикл выполняется 5 раз.
4. Подождать, пока одна из кнопок на EV3 не будет нажата.
5. Воспроизвести звук Click.
6. Считать значения блока переменных «Вождение». Выбрать функцию «Чтение числового массива».
7. Использовать блок «Операции над массивом». Выбрать «Записывать по индексу — числовое значение».a. Использовать шину данных для блока переменных «Вождение».
b. Связать шиной данных Параметр цикла в начале цикла и соответствующую ячейку блока «Операции над массивом».
c. Связать шиной данных значение времени ожидания для Модуля EV3 и соответствующую ячейку блока «Операции над массивом».8. Записать выходное значение блока «Операции над массивом» в блок переменных «Вождение».
9. Ожидать в течение 2 секунд.
10. Воспроизвести звук Go.
11. Создать второй цикл. В данном примере программы цикл выполняется 5 раз, то есть столько же, сколько и первый цикл.
12. Считать значения блока переменных «Вождение». Выбрать функцию «Чтение числового массива».
13. Использовать блок «Операции над массивом». Выбрать функцию «Читать по индексу — числовое значение».
14. Числовой switch (переключатель):a. Если переменная «Вождение» = 0 (по умолчанию), не предпринимать никаких действий.
b. Если переменная «Вождение» = 1, выполнить разворот влево.
c. Если переменная «Вождение» = 3, выполнить разворот вправо.
d. Если переменная «Вождение» = 4, переместить робота вперёд на 2 оборота колёс.
e. Если переменная «Вождение» = 5, переместить робота назад на 2 оборота колёс.15. Воспроизвести звук «Game Over 2».
Программные решения EV3 MicroPython
Запись одного движения робота
Запись нескольких движений робота
Дополнительно
Развитие языковых навыков
Вариант 1
Использование текстового программирования:- Предложите учащимся изучить возможности текстового программирования, чтобы сравнить различные языки программирования.
Вариант 2
На этом уроке учащиеся собрали беспилотный автомобиль, управляемый с помощью инструкций, передаваемых ему в виде массива данных. Что может произойти, если беспилотные автомобили будущего будут иметь возможность не принимать во внимание данные, введенные водителями-людьми?
Для развития языковых навыков попросите учащихся:- записать аргументы в пользу точки зрения, согласно которой беспилотные автомобили не должны иметь возможности автономно управлять своей скоростью, независимо от данных, вводимых пассажиром;
- привести доказательства обоснованности этого мнения, привести примеры ситуаций, в которых такая возможность создавала бы неудобства для пассажира;
- рассмотреть противоположную точку зрения, согласно которой автономный контроль скорости беспилотными автомобилями может стать эффективным методом повышения безопасности водителя и дорожного движения.
Развитие математических навыков
На этом уроке учащиеся подготовили последовательность пошаговых инструкций для беспилотного автомобиля. Используя датчики и систему машинного обучения, беспилотные автомобили могут выполнять такие инструкции и изменять их в зависимости от условий.
Для развития математических навыков и изучения возможностей применения машинного обучения в беспилотных автомобилях выдайте учащимся определённый «лимит» поворотов. Затем попросите их:- создать шаблон, представляющий собой сеть городских улиц (например, пять улиц, идущих с востока на запад, и пять улиц, идущих с севера на юг);
- выбрать пункт отправления и пункт назначения и, помня о том, что путь с наименьшим количеством поворотов является самым лучшим, проанализировать три пересечения улиц на пути от пункта отправления до пункта назначения;
- определить вероятность прибытия робота в пункт назначения без превышения выданного «лимита поворотов» при условии его движения в произвольном направлении.
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.1. Задание выполнено не полностью.
2. Задание выполнено полностью.
3. Результаты превзошли ожидания.Используйте следующие критерии для оценки успехов детей в обучении.
- Учащиеся могут определить ключевые элементы задачи.
- Учащиеся самостоятельно разрабатывают работающие и креативные решения.
- Учащиеся могут понятно рассказать о своих идеях.
Самостоятельная оценка
Когда учащиеся получат первые сведения об эффективности моделей, дайте им время, чтобы оценить свои решения. Вы можете задать следующие вопросы.- Ваше решение соответствует критериям технического задания?
- Можно ли сделать движения вашего робота более точными?
- Какие способы решения этой задачи нашли другие команды?
Попросите учащихся придумать и задокументировать два варианта усовершенствования их решений.
Оценка одноклассников
Организуйте процесс оценки решения одноклассниками, в ходе которого каждая группа должна оценить свой собственный проект и проекты других групп. Это поможет развивать навыки высказывания конструктивного мнения, а также совершенствовать навыки анализа и умение использовать объективные данные для аргументации своей позиции.Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности:
- бизнес и финансы (предпринимательство);
- производство и инженерное дело(проектирование).
В помощь преподавателю
Учащиеся смогут:
использовать процесс разработки для решения задач из реальной жизни.Эти роботы дадут тебе возможность в полной мере познакомиться с серией EV3. В комплекте идут инструкция по сборке, задания для программирования и инструмент программирования, собранные в новом приложении для программирования EV3. Новичкам в создании роботов рекомендуется начинать с этой модели.
Если ты еще никогда не собирал роботов LEGO MINDSTORMS, мы рекомендуем начать с этого! TRACK3R представляет собой робота высокой проходимости на гусеничном ходу с четырьмя взаимозаменяемыми инструментами. Начни с создания корпуса робота, а затем познакомься с возможностями, которые дают 4 разных инструмента TRACK3R: измельчитель с двойным лезвием, разрушительная базука, захватная клешня и молот.
Управляй роботом TRACK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
![]()
Это шестилапое создание не только выглядит как скорпион, но и ведет себя соответственно. Он может резко развернуться, схватить предмет своей клешней-дробилкой, а хвост-молния готов дать отпор всему, что окажется на его пути.
Управляй роботом SPIK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
![]()
Один из самых популярных роботов R3PTAR (высота — 35 см) может скользить по полу как настоящая кобра и с нереальной скоростью атаковать предметы своими красными клыками.
Управляй роботом R3PTAR с планшета или смартфона при помощи бесплатного приложения Robot Commander.
![]()
Робот GRIPP3R создан для поднятия тяжестей У него достаточно сил, чтобы своими мощными захватами поднять и кинуть жестяную банку.
Управляй роботом GRIPP3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.
![]()
EV3RSTORM — самый усовершенствованный робот LEGO® MINDSTORMS®. Высокий уровень интеллекта и боевая мощь в сочетании с разрушительной базукой и вращающимся тройным лезвием делают робота EV3RSTORM непобедимым.
Загрузи бесплатное приложение Robot commander LEGO® MINDSTORMS® и управляй роботом EV3RSTORM с планшета или смартфона.
![]()
Роботы, созданные фанатами
Эти роботы были созданы самыми преданными поклонниками; они могут стать источником нового необыкновенного опыта в сборке и программировании. Мы рекомендуем приступать к сборке этих моделей после того, как тебе удалось собрать 2–3 робота из основной серии.
Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
Роботом-погрузчиком Bobcat® с дистанционным управлением можно управлять при помощи кнопок ИК-маяка, заставляя его двигаться или поднимать предметы.
![]()
Разработчик Ральф Хемпел (Ralph Hempel)
Это робот, который умеет рисовать? Точно! Используя обычный маркер, этот принтер рисует линии на бумаге для кассовых аппаратов. Воспользуйся существующей программой,чтобы написать LEGO EV3, или создай свою собственную, чтобы нарисовать всё, что захочется!
![]()
Разработчик Лоренс Валк (Laurens Valk).
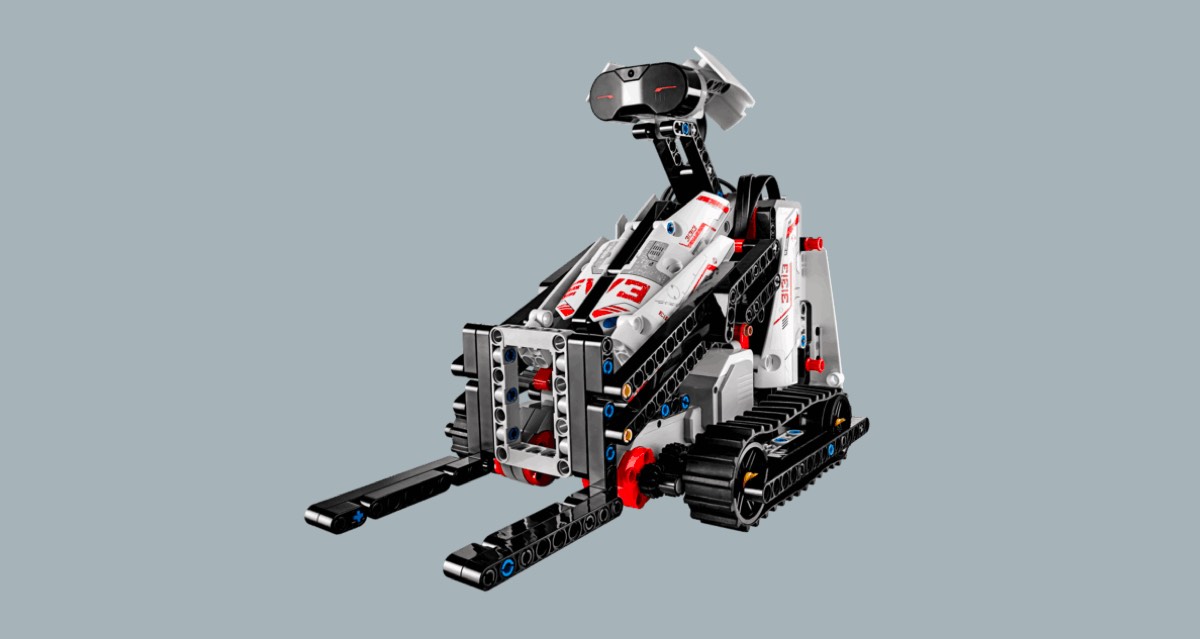
Хочешь грузовик с дистанционным управлением? Понятно! Крутой автомобиль для увлекательной игры. RAC3 легко модифицируется для движения с большей скоростью за счет дополнительных приводов; кроме того, к нему можно добавить специально собранный прицеп и использовать грузовик как средство для транспортировки.
![]()
Разработчик Лассе Стенбэк Лауесен (Lasse Stenbæk Lauesen).
Очаровательный робот-трицератопс может передвигаться и поворачиваться на четырёх ногах.
![]()
Разработчик Марк-Андре Базергуи (Marc-Andre Bazergui)
Этот робот — забавный сумасбродный компаньон, реагирующий на ИК-маяк своего друга-жучка. Вы можете управлять роботом KRAZ3 с помощью настраиваемой программы, ИК-маяка или запрограммировать его так, чтобы он двигался по комнате за своим другом-жучком. Разработчик Марк-Андре Базерги (Marc-Andre Bazergui)
![]()
Разработчик Вассилис Чриссантакопулос (Vassilis Chryssanthakopoulos)
Робот, созданный по мотивам R2D2 из «Звездных войн», может общаться, следовать за владельцем или перемещаться по комнате туда, куда ему укажут, — через ИК-маяк. Он поддерживает большой набор сценариев, которые легко запрограммировать или расширить, используя новое программное обеспечение EV3.
![]()
Разработчик Даниэле Бенедеттелли (Daniele Benedettelli)
Готов сыграть рок-н-ролл? На гитаре LEGO можно играть почти как на настоящем инструменте. Ударяй по одной струне, перебирай пальцами по безладовому грифу и создавай звуки, используя тремоло-систему, чтобы сыграть самые невероятные гитарные соло!
![]()
Разработчик Мартин Боогаартс (Martyn Boogaarts)
Дружелюбный робот-помощник, у которого лучше всего получается перемещаться по линиям разного цвета при помощи датчика освещенности, который позволяет ему обнаруживать препятствия на своем пути и реагировать на них. Робот может перемещаться самостоятельно или управляться с помощью ИК-маяка.
![]()
Разработчик Рикардо Оливейра (Ricardo Oliveira)
Этот робот хочет поиграть с тобой. Положи красный мяч под стаканчик, используй ИК-маяк, чтобы задать свой уровень, и посмотри, как робот меняет стаканчики. Теперь тебе нужно угадать, где же спрятан мяч? Предложи друзьям посоревноваться, кто быстрее всех найдет красный мяч!
![]()
Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
Этот робот поможет рассортировать все имеющиеся у тебя балки LEGO®Technic. Просто вставь балку в механизм, а MR-B3AM определит её цвет и размер.
![]()
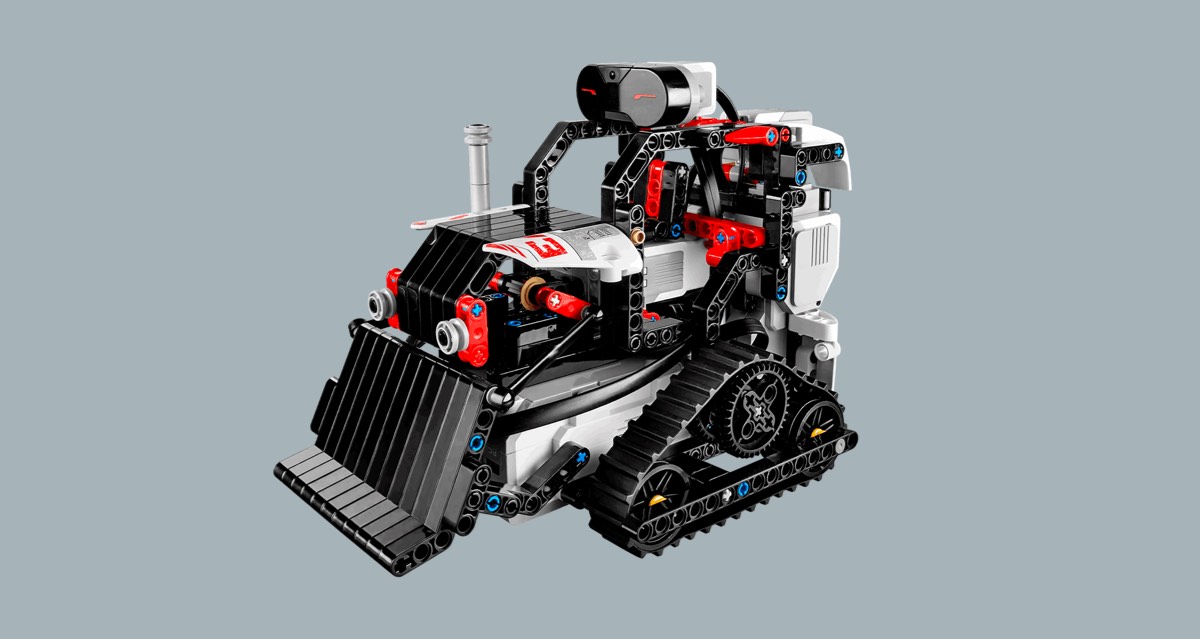
Разработчик Марк Кросби (Mark Crosbie)
Этот робот-бульдозер управляется с помощью ИК-маяка, но может двигаться и самостоятельно, объезжая препятствия, пока расчищает дорогу и передвигает предметы своим бульдозерным ковшом.
![]()
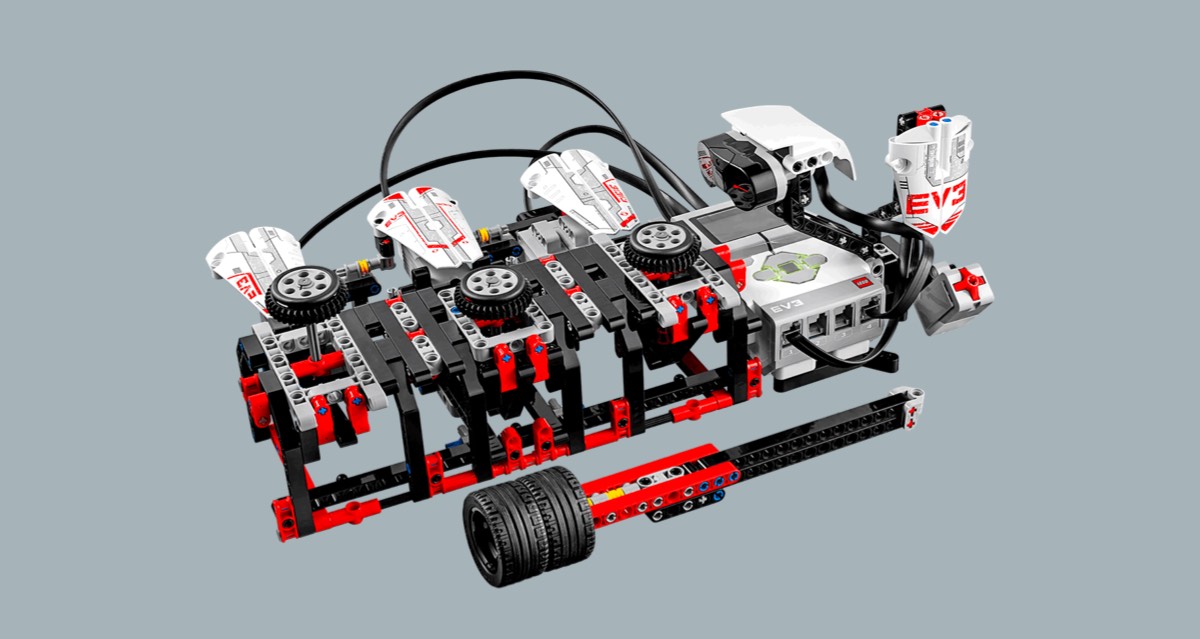
Разработчик Мартин Боогаартс (Martyn Boogaarts)
Эта игра в стиле традиционных игровых автоматов проверяет скорость реакции. Робот поднимет диски, а ты должен как можно быстрее ударить по ним молотком. Предложи друзьям устроить соревнование, чтобы выяснить, кто из вас быстрее всех!
![]()
Конкурс по сборке Remix Challenge
Собирай крутых новых роботов, смешивая детали LEGO® MINDSTORMS® с деталями своего любимого набора из серии LEGO Technic. LEGO MINDSTORMS и LEGO Technic — идеальное сочетание для создания совершенно нового семейства роботов LEGO с классным дизайном и интересными возможностями. Нажми на изображения ниже, чтобы изучить и построить модели-победители ежегодного конкурса LEGO Remix Challenge: «Часы с кукушкой», собранные из деталей наборов EV3 (31313) и «Грузовой вертолёт» LEGO Technic (42052), и DOODLEBOT, собранный из деталей наборов EV3 и «Экстремальные приключения» LEGO Technic (42069).
Создавай собственные рисунки с помощью модели DOODLEBOT от LEGO® MINDSTORMS® или же переключи её в режим автопортрета, чтобы она нарисовала саму себя. Положи под руку робота чистый лист бумаги, дай ему карандаш и создавай свои шедевры, управляя им с помощью пульта ДУ EV3. Робот уже запрограммирован на три различных режима рисования.
DOODLEBOT — победитель конкурса сборки моделей LEGO MINDSTORMS Remix Challenge 2017 года. Его построили из деталей двух популярных наборов: LEGO MINDSTORMS EV3 (31313) и «Экстремальные приключения» LEGO Technic (42069).
Читайте также: