
Кибернетический конструктор по робототехнике
Обновлено: 02.05.2024
Сейчас мы готовим новую площадку для детских занятий. В процессе подготовки стал вопрос выбора платформы, на которой будем обучать. По такому случаю мы подготовили обзор имеющихся платформ с обоснованием выбора. Документ, вроде, интересный получился, решил его здесь опубликовать. Некоторые вещи изложены сильно упрощенно, поскольку текст предназначен не только для хардкорных технарей.
- Большая методическая база на русском языке;
- От преподавателя требуется не очень высокая квалификация;
- Конструктор очень прочный, детям редко удается что-то сломать.
- Изначально это все-таки детский конструктор, для серьезных задач не предназначенный;
- Конструктор закрытый, ни с чем не совместим, производитель искусственно создает препятствия к тому, чтобы можно было цеплять к нему компоненты других конструкторов и разрабатывать собственные компоненты;
- Программировать можно либо в визуальных средах программирования, либо на С++.
Fishertechnic
Есть и другие конструкторы, основной смысл которых — демонстрировать детям какие-то отдельные интересные инженерные элементы. Они имеют достаточно узкое применение, мы их особо не изучали.
Стоимость Fishertechnic примерно соответствует стоимости Лего.
Arduino
Arduino — самая распространенная платформа для взрослой робототехники и электроники, вторая по распространённости среди детей. Разработка полностью открытая, у нее есть множество ответвлений.
Raspberry Pi и аналоги
Raspberry Pi — это компьютер под управлением операционной системы Linux, имеющий размеры баковской карты. На нем можно запускать те же программы, делать те же вычисления, что и на настольном компьютере (есть видеовыходы, аудиовыходы, USB). Малые размеры вкупе с низким энергопотреблением позволяют устанавливать его на подвижных роботов.
Raspberry поддерживает язык программирования Python. Это наиболее перспективный учебный язык программирования. На западе учебные заведения постепенно переводят на него свои учебные программы. Поддержка этого языка, по нашему мнению, является главным достоинством Raspberry.
- По сравнению с Ардуино, Raspberry имеет примерно в два раза более высокую стоимость;
- Подключать внешние устройства (датчики, моторчики) к ней существенно сложнее, если не использовать специальные модули расширения.
Например, может быть реализован следующий сценарий использования: сначала, когда ребенок только начинает заниматься робототехникой, он работает с Ардуино в графической среде программирования; далее, когда он вырастает из графической среды, подключаем к ардуине Raspberry, и ребенок начинает программировать на Python, использовать различные дополнительные возможности. Если дорогая Raspberry недоступна, ребенок может программировать имеющуюся ардуину на С++.
Механические конструкторы для Arduino и Raspberri
На наш взгляд, наиболее перспективным является недавно появившийся конструктор Multiplo. В отличии от других конструкторов у него основные детали не металлические, а вырезаны из трехмиллиметрового пластика. Благодаря этому их можно вырезать самостоятельно на специальном станке (тем более, что 3Д-модели деталей выложены в открытый доступ, проект опенсорсный). Если специальный станок недоступен, детали можно вырезать руками с помощью лобзика и дрели.
Помимо винтов в Multiplo широко используются пластиковые заклепки, благодаря этому собирать конструктор гораздо интереснее и быстрее.
Стоимость Huna с Ардуино на борту примерно соответствует стоимости Лего. Стоимость Multiplo с Ардуино на борту примерно в полтора раза ниже.
- У детей развивается мелкая моторика;
- Нигде на производстве не используются крепления как в Лего, везде крепеж на винтах.
Заключение
Мы остановились на варианте arduino + Raspberry Pi + конструктор Multiplo.
До седьмого класса нужно что-то другое, этот вопрос мы пока мало изучали.
Если стоит задача привить интерес к каким-то узким отраслям промышленности, то нужен Fishertechnic или аналог.
Если стоит задача научить детей самих нарезать и печатать детали, то за основу лучше брать Multiplo.

Что общего между женской грудью и игрушечной железной дорогой? Правильно, и то, и то предназначено для детей, а играют с ними папы. Несколько дней назад я обзавёлся роботехническим конструктором ТРИК. Комплект довольно суровый, разработчики утверждают, что он хорош для быстрого прототипирования и для обучения, а именно (само-)обучение меня в данный момент и интересует.
Что сейчас широко доступно на рынке для робототехнических игр? Самодельное изготовление плат под каждый проект не рассматриваем. Лего, распи, ардуино. Лего прекрасен, но, к сожалению, очень и очень сильно ограничен. Распи и ардуины неплохо расширяются, но довольно неудобны и быстро превращаются в рассыпуху разных карточек-шильдиков-макеток. Вот тут и выходят на рынок питерские ребята со своим конструктором ТРИК.
Итак, моя задача понять, насколько это доступно широкой публике (мне). Я никогда не посещал лекций ни по теоретической кибернетике, ни по теории управления. Закон Ома я выучил ровно настолько, чтобы понять, что розетку лизать не стоит, и паяльник не является моим другом. Но как всякий нормальный (великовозрастный) ребёнок играть я люблю, и поэтому заинтересовался этой темой.
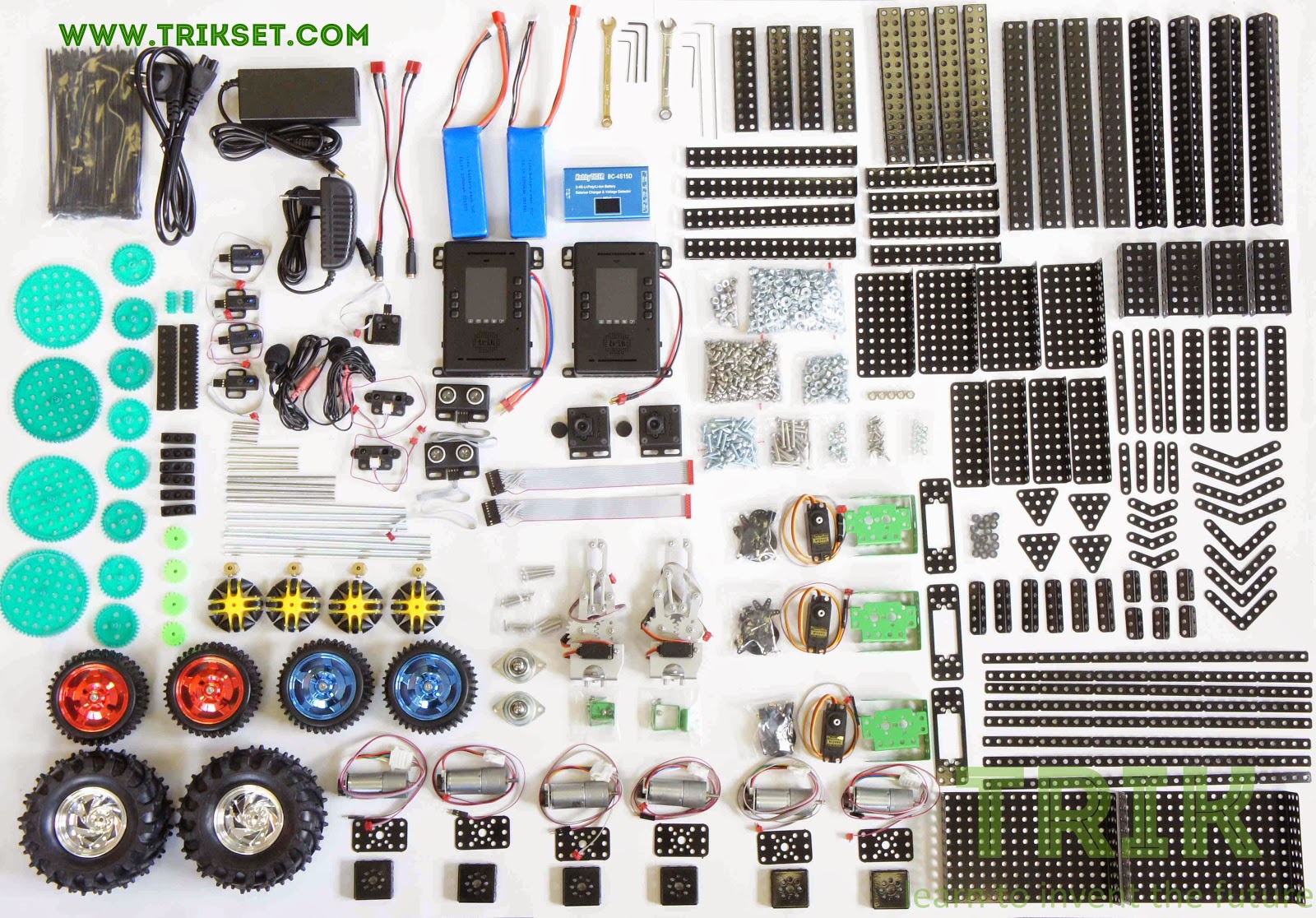
Я получил вот такой набор:
Вообще цена их наборов варьируется от примерно двадцати до семидесяти тысяч рублей. Дороже ли это, чем лего? Нет. Месяц назад я купил Lego EV3. Цена вопроса 370€ базовый набор + 100€ аккумулятор (они там совсем офигели?!) И это ещё я не считал зарядника за тридцать евро. Плюс ко всему в базовый набор не входят ни сонар (+35€), ни гироскоп (+35€). А уж про камеру с микрофоном и вообще можно забыть, не упоминая вообще в принципе отустствия доступа внутрь леговского линукса.

Вот так выглядит моя чудо-коробка:

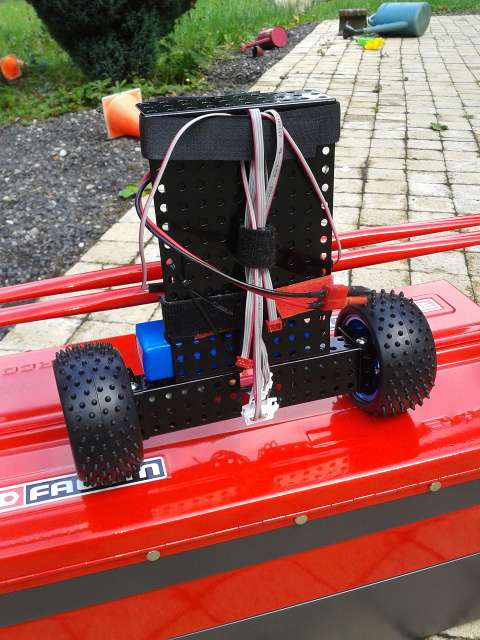
В качестве самого первого проекта я решил собрать обратный маятник, он и представлен на заглавной картинке. Вот так он выглядит сзади:
Из набора мне понадобилось два двигателя, два колеса, чуть крепежа и непосредственно контроллер с батареей. Моей целью не было скопировать туториал из обучающего курса ТРИК, мне интересно обломать зубы обо все проблемы самостоятельно, поэтому я буду изобретать велосипед.
Итак, в моём распоряжении одна степень свободы, акселерометр и гироскоп, энкодеры от двигателей я не использовал. Писать буду на Qt Script.
Изначально я хотел обойтись одним акселерометром. Типа, читаю знак проекции на ось Z, если он положительный, то кручу колёса в одну сторону, если отрицательный, то в другую. В теории всё хорошо, но сделав это, добился только дикого дрыганья моей тележки. Вздохнул и сел штудировать литературу, благо, что она оказалась не сильно долгой. Итак, меня интересует только угол отклонения тележки от вертикали.
Гироскоп
Он же датчик угловых скоростей, выдаёт хороший плавный сигнал, но чтобы отследить с его помощью ориентацию в пространстве, скорости нужно интегрировать. Изначально скорости выдаются с погрешностью, интеграция вносит ещё ошибок, что в итоге приведёт к уплыванию показаний гироскопа. Поэтому только гироскопа нам для маятника недостаточно, нужно его комбинировать с акселерометром.
Вот мой код работы с гироскопом, здесь while(true) — основной цикл программы.
В массив G я читаю значения датчика, в следующей строчке произвожу коррекцию интересующей меня оси. Выясняется, что мой конкретно датчик в полном покое показывает в среднем скорость в 69 единиц, поэтому я их вычитаю, чтобы получить интересующую меня скорость.
Датчик выдаёт целое число, которое нужно перевести в углы. В штатном режиме он работает на 2000 градусов/сек (dps). Даташит говорит, что этому соответствует константа в 70mdps/digit. Таким образом, G(digits) * 0.07 (dps/digit) даёт нам угловую скорость. Осталось её проинтегрировать, умножив на время измерения dt.
Акселерометр
Из акселерометра угол получить ещё проще, однако проблема в том, что уж больно он шумный, а уж когда тележка начинаёт дёргаться туда-сюда, вообще туши свет. Вот так выглядит код:
Гасим шум: совмещение показаний акселерометра и гироскопа
Это просто говорит, что значение текущего угла это на 98% значение предыдущего угла с поправкой от гироскопа, а на 2% — это прямое чтение угла от акселерометра. Такое совмещение позволяет бороться с уплыванием гироскопа, обратите внимание, что переменную gyr_x_angle мы тут вообще не использовали.
Как я уже говорил, я не посещал умных лекций по теории управления, поэтому LQR-регуляторы мне не по зубам за разумное (пара часов) время. А вот ПИД вполне подойдёт.
В предыдущем параграфе мы получили пристойную (я надеюсь) оценку угла отклонения тележки от вертикали. Улучшить её можно, используя фильтрацию Калмана, но это стрельба из пушки по воробьям. Теперь пришло время крутить колёса — чем больше угол отклонения, тем быстрее нужно крутить колесо.
Скорость вращения колеса, которую нам выдаст ПИД, состоит из трёх (взвешенных) слагаемых: пропорциональной, интегирующей и дифференцирующей. Пропорциональная просто равна углу отклонения от вертикали, интегрирующая — это сумма всех ошибок регулирования, а дифференцирующая пропорциональна скорости изменения отклонения от вертикали.
Звучит это страшно, а на деле код крайне простой:
Выбор констант KP, KI, KD
Осталась самая сложная часть: найти значения весов в сумме, к сожалению, это можно только делать эмпирически.
Для начала найдём коэффициент KP. Положим KI и KD равными нулю и увеличиваем KP начиная с нуля до того момента, когда наша тележка начнёт совершать (примерно) постоянные колебания, примерно вот так (KP=8, KI=0, KD=0):
Очевидно, что это перебор, тележка получает слишком сильный сигнал от пропорциональной составляющей, поэтому уменьшим её примерно вполовину, получим вот это (KP=5, KI=0, KD=0):
Теперь тележке не хватает чисто пропорционального сигнала, увеличим её скорость, добавив интегрирующей компоненты. Плавно увеличиваем KI с нуля, пытаясь достигнуть момента, когда снова получим колебания тележки вокруг желаемого положения (KP=5, KI=0.5, KD=0):
Теперь добавляем дифференцирующую компоненту, которая будет играть роль демпфера, гася колебания, вот что у меня получается (KP=5, KI=0.5, KD=5):
У меня довольно быстро (за один вечер) получилась самобалансирующаяся тележка. Учитывая, что программа у меня получилась аж в двадцать пять строк, то теперь на досуге осталось добавить управление тележкой, повороты и прохождение полосы препятствий, это не должно составить больших сложностей.
Ни электротехнического, ни кибернетического бэкграунда у меня нет, то есть, это вполне доступно рядовым пользователям, что, собственно, мне и очень интересно. Буду продолжать изучение!
По сравнению с тем же леговским набором оно всё, конечно, выглядит несколько топорнее, китайские датчики (как и у лего), но не закатанные в толстенный качественный леговский пластик. Менее вылизанный софт, который находится в активной разработке. Существенно меньше сообщество людей, программирующих на этом контроллере, но учитывая, что проекту без году неделя, да ещё видя недавний успех ардуино, это меня мало пугает. Зато меня восхищает гибкость контроллера, которая получилась из потрясающго энтузиазма, с которым в Питере взялись за разработку.

Кибернетический конструктор по робототехнике позволяет собирать роботов на основе передовых технологий мирового уровня, создавать различные модели

Набор для уроков технологии. Позволяет собрать четыре образовательных, интерактивных стенда для проведения исследовательских работ

Набор для подготовки к Олимпиаде Национальной технологической инициативы по профилю «Интеллектуальные робототехнические системы».

Набор для учебных заведений для дополнительного образования, внеурочной и урочной деятельности. Рассчитан на 4 учеников.


Набор для учебных заведений дополнительного образования, но также подойдет для внеурочной и урочной деятельности и прохождения курса «Основы программирования роботов».

Набор со всем необходимым для сборки своего первого робота! Это может быть и радиоуправляемая игрушка, и учебное пособие для изучения основ кибернетики и программирования.
ТРИК — это кибернетический конструктор для образования и творчества. В каждом наборе есть всё для сборки робота, умеющего слышать, видеть, разговаривать и выполнять сложные действия. В комплект входит контроллер ТРИК, металлический конструктор, бесплатное ПО и учебные материалы. На наборах обучаются в более 500 учебных заведениях, в том числе школах, университетах и Центрах молодежного инновационного творчества.
Наборы подходят для: урочной деятельности, внеурочной деятельности, дополнительного образования, частного использования.
Инновации в образовании Создание сайта Digital Agency Dial

Летние каникулы – прекрасное время для того, чтобы узнать что-то новое, провести время на свежем воздухе, познакомиться с людьми, с которыми у вас похожие интересы.
Для ребят, переходящих в 9-11 классы и интересующихся программированием, теорией алгоритмов, математикой, робототехникой, компании ABBYY и Яндекс открывают летнюю школу в Подмосковье.
На самом деле событие ежегодное, но хочется отметить, что в этом году было включено направление робототехники (в дополнение к направлениям олимпиадное программирование и разработка приложений).
Летняя школа пройдёт с 3 по 23 августа 2014 года в окрестностях Звенигорода — пансионат Ершово (это одна из немногих оставшихся дворянских усадеб Подмосковья).
- Робототехника Arduino
- Робототехника ТРИК (отечественный кибернетический конструктор ТРИК)
Робототехника Arduino

Курс направлен на внедрение, распространение лучших практик по профориентации талантливой молодежи на инженерно-конструкторские специальности; соответствует международной образовательной парадигме «STEM-образование» (Science, Technology, Engineering, Mathematics).
Занятия позволят школьникам приобрести навыки работы с этой популярной во всем мире платформой, дадут возможность познакомиться с микроконтроллерами, проектированием и программированием простых устройств, а также создать по своей задумке уникальные гаджеты, воплотив самые невероятные идеи.
В конце курса создадут финальный творческий проект.
В итоге, ученик получит отличную базу знаний, которая запросто может быть использована в будущем: для новых проектов и для поступления в технический ВУЗ.
Основа учебного оборудования — это открытая платформа Arduino, которая позволяет собирать всевозможные электронные устройства, которые могут работать как автономно, так и в связке с компьютером. Все зависит от предложенной идеи.
Преподаватели: Денис Геннадьевич Копосов и Алексей Перепелкин.

Денис Копосов — это учитель информатики из гимназии №24 г. Архангельска, который благодаря своей личной инициативе в течение нескольких лет (с 2009 года) успешно ведёт и развивает на базе своей школы — уроки робототехники, и популяризирует STEM-робототехнику, начала инженерного образования в школе.
В своей школьной лаборатории совместно со школьниками, на практике опробовали, множество образовательных наборов по робототехнике, что привело к созданию учебных курсов-лабораторий для учащихся от 5 до 11 классов (на базе Lego, Arduino, Scratch, ChipKIT, NI LabVIEW, LilyPad и др.):
- робототехника LEGO (на базе образовательных наборов LEGO MINDSTORMS NXT), для учащихся 5–7 классов;
- простые системы управления (на базе платформы Arduino и программного обеспечения Scratch) для учащихся 5–6 классов;
- программирование микроконтроллеров (на базе платформы ChipKIT UNO32), для учащихся 7–8 классов;
- датчики и обработка сигналов (на базе платформы Arduino и наборов из 15 датчиков); для учащихся 8–9 классов;
- проектирование цифровых устройств (на базе платформы Arduino и наборов электронных компонентов), для учащихся 9–10 классов;
- мобильная робототехника (на базе Arduino-совместимых контроллеров и DIY-наборов по робототехнике), для учащихся 9–11 классов;
- сбор данных и измерительные системы (на базе NI myDAQ, наборов электронных компонентов и NI LabVIEW 2010 Education), для учащихся 10–11 классов;
- сложные инженерные системы (на базе NI myRIO, наборов электронных компонентов и NI LabVIEW 2013), для учащихся 10–11 классов;
- электронный текстиль (на базе LilyPad Arduino);
- технология бесконтактного взаимодействия с компьютером (на базе Microsoft Kinect for Windows), для учащихся 9–11 классов.
- тестирование и исследование оборудования, для учащихся 7–11 классов.
Большое число лабораторий инженерной направленности, во-первых: позволяет выстроить образовательную траекторию школьников таким образом, что они будут заинтересованы в дальнейшем изучении инженерных направлений, во-вторых: учащиеся приобретают реальный опыт научно-исследовательской, проектно-конструкторской, организационно-управленческой и эксплуатационной профессиональной деятельности.)

Алексей Перепелкин — координатор образовательных проектов Амперки, руководитель Кружка робототехники в Крылатском. Кроме этого он курирует курсы по обучению преподавателей, дистанционные курсы по Arduino.

Пример учебного стенда на базе Ардуино и модулей Troyka от Амперки:
Вот учебный план направления “Робототехника Arduino”:
Тема 1. Введение
Знакомство с платформой Arduino. Электронные компоненты. Среда разработки. Выполнение 20 обучающих мини-проектов.
Тема 2. Датчики
Сенсоры (датчики) аналоговые и цифровые. Датчики расстояния. ИК-датчик расстояния и интерполяция. Датчики освещенности.
Тема 3. Визуализация
Среда Processing. Визуализация данных, получаемых с датчиков.
Тема 4. Робот DIY
Управление моторами. Сборка, настройка, программирование двухколесного робота. Движение робота по линии.
- управление рукой-манипулятором,
- биометрические системы,
- система полива растений через локальную сеть или Интернет,
- электронный текстиль,
- метеостанция,
- пропускные системы и многое другое.
Робототехника ТРИК

Набор ТРИК — это продолжение отечественного железного конструктора (известного многим), но только применительно в робототехнике (сайт, ВК группа).
Кибернетический конструктор ТРИК позволяет собрать множество различных робототехнических моделей: от базовых образовательных до самых современных, способных «видеть», «слышать», взаимодействовать.
Конструктор ТРИК это не просто забавная игрушка, а прекрасный набор прототипирования робототехнических моделей: крепкий «скелет», базовые приводы, необходимые сенсоры.
- Крепкий металл. Детали изготавливаются толщиной 0,75мм, 0,8мм, 1,0мм.
- Жесткий профиль. Балки П-образного профиля.
- Удобно собирать. Предусмотрены переходники (адаптеры) для крепления типовых моторов, сервомоторов и т.д.
Преподаватели: Сергей Филиппов и Илья Широколобов.
Если вы как-нибудь попробуйте поискать в интернете книгу по Робототехнике на русском, то с большой вероятностью вы найдёте книгу — Сергея Филиппова “Робототехника для детей и родителей”.

Сергей Филиппов — Учитель, методист, педагог дополнительного образования, руководитель Центра робототехники Президентского физико-математического лицея №239. Руководитель городского методического объединения преподавателей робототехники Санкт-Петербурга. Руководитель команд, побеждавших на крупнейших международных соревнованиях по робототехнике, автор учебников.

Илья Широколобов — Аспирант кафедры теоретической кибернетики СПбГУ, руководителем секции по робофутболу кружка робототехники СПбГУ и ведёт кружок робототехники в ДДЮТ Фрунзенский (СПБ).
Набор ТРИК участвовал в российском этапе Всемирной Олимпиады Роботов (WRO), что недавно прошел в Казани:


Плюсом к этому идёт open-source ПО TRIK Studio для программирования роботов:
Учебный план направления “Робототехника ТРИК”:
- Следование по линии.
- Поиск объектов.
- Объезд препятствий.
- Сортировка объектов.
В заключение
Зачем робототехника ИТ-компаниям? На мой взгляд это:
- инвестиции в кадры
- повышение интереса к ИТ (программирование)
- привлечение школьников к специфичным направлениям, которые есть у Яндекса и ABBYY — машинное обучение, система распознавания образов.
Машинное обучение на больших данных — это новая большая технология. Все большие новые технологии проникают везде. Когда 200 лет назад появилась паровая механика, это было слияние паровоза со всем: появились средства транспорта, новые текстильные станки, везде началась механизация, и это была революция. То же с электроникой, то же самое с интернетом: в нашей жизни появились коммуникации, они везде.
Сейчас на каждой улице стоят десятки видеокамер, мы носим в кармане по прибору с десятком датчиков, мы постоянно что-то запрашиваем в интернете и т. д. — это все куча сигналов. Когда самолет летит, у него все в датчиках, машина едет, она вся в электронике, все пронизано датчиками. Все они собирают огромные массивы данных. С ними можно делать какую-то математику, какую-то «умность». И эта «умность» везде что-нибудь оптимизирует на 5–10%. Это по сути следующая индустриальная революция. Тот, кто сумеет собрать и обработать эти данные, соединить их с машинным обучением, получит очевидные преимущества. У нас в этом смысле в стране есть хорошая школа. И если мы научим этому несколько тысяч человек — это большая индустрия для мира.
Робототехника — включает в себя машинное обучение. Распознавание образов (от ABBYY) так же активно используется и развивается в робототехнике, от простейших (line follower) до распознавания лиц.
Радует, что такие компании как Яндекс, и ABBYY обратили внимание на робототехнику, образовательную робототехнику. На мой взгляд интеграция робототехники в школьные занятия будет способствовать естественному формированию интереса к ИТ-дисциплинам, к техническому творчеству и в конечном итоге к знаниям у школьников.

Добрый день! Присоединиться к курсу не могла, но очень хотелось бы посмотреть видео с уроков. Есть ли такая возможность?

ТРИК. Робототехнический конструктор запись закреплена
Старт 1 цикла бесплатных очных курсов для педагогов "Методика преподавания робототехники на базе кибернетического конструктора ТРИК" уже в следующий понедельник (13 июня)
На курсе вводятся базовые понятия и разбираются задачи для первого года обучения по направлению "Робототехника".
Курс предназначен для учителей информатики, технологии и физики, а также педагогов дополнительного образования.
Показать полностью.
Длительность: 36 часов.
Начальные требования к слушателям: уверенное владение компьютером.
На курсах будут предоставлены стационарные компьютеры и программное обеспечение, но лучше иметь свой ноутбук.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2
ТРИК. Робототехнический конструктор запись закреплена
Робоклешня из робототехнического конструктора ТРИК. В ней задействована еще одна наша технология – TRIK Gamepad.
TRIK Gamepad – это бесплатная программа-пульт для управления программируемыми роботами ТРИК.
Делитесь вашими идеями с нами и мы их опубликуем!
ТРИК. Робототехнический конструктор запись закреплена
По итогам конкурсного отбора лучшего отечественного учебного оборудования и средств обучения 2022 года "Модульный набор ТРИК для уроков технологии" получил знак отличия «Выбор педагогов».
Спасибо всем, кто выбрал нас!
ТРИК. Робототехнический конструктор запись закреплена
ТРИК. Робототехнический конструктор запись закреплена
С 27 июня по 02 июля пройдет III цикл курсов (для освоивших II цикл) для педагогов – "Методика преподавания робототехники на базе кибернетического конструктора ТРИК"
О чем курс?
На курсе разбираются задачи навигации, локализации, технического зрения, межагентного взаимодействия.
Показать полностью.
Категория слушателей: Данный курс предназначен для педагогов дополнительного образования.
Начальные требования: сертификат (или любое другое подтверждение) о прохождении второго цикла курса либо опыт преподавания робототехники от трех лет, уверенное владение синтаксисом одного из текстовых языков. Наличие собственного ноутбука.
Курс проходит только в очном формате. Трансляции не предполагается.
Длительность курсов: 36 часов.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2
ТРИК. Робототехнический конструктор запись закреплена
Вот такие вот интересные идеи из нашего металлического конструктора от наших подписчиков. Делитесь вашими проектами с нами и мы их опубликуем!

ТРИК. Робототехнический конструктор запись закреплена
20 - 25 июня состоится II цикл курсов (для освоивших I цикл) под руководством Широколобова Ильи Юрьевича – "Методика преподавания робототехники на базе кибернетического конструктора ТРИК"
О чем курс?
На курсе рассматриваются базовые задачи навигации, локализации, фильтрации, работы с массивами. В начале курса происходит небольшой экскурс по синтаксису Python и библиотеки управления роботами ТРИК.
Показать полностью.
Для кого курс?
Данный курс предназначен для педагогов дополнительного образования.
Начальные требования к слушателям:
Сертификат (или любое другое подтверждение) о прохождении первого цикла курса, либо опыт преподавания робототехники от двух лет, владение базовыми навыками программирования на любых текстовых языках (Pascal, Python, JavaScript и т.д.).
Курс проходит только в очном формате. Трансляции не предполагается.
Длительность курсов: 36 часов.
На курсах будут предоставлены стационарные компьютеры и программное обеспечение, но лучше иметь свой ноутбук.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2
Читайте также: