
Кибернетический конструктор трик образовательный
Обновлено: 15.05.2024
Кибернетический конструктор по робототехнике позволяет собирать роботов на основе передовых технологий мирового уровня, создавать различные модели от простых радиоуправляемых до сложных современных кибернетических систем.
Контроллер кибернетического конструктора позволяет собирать автономные системы, способные захватывать и обрабатывать видео- и аудиопотоки без подключения дополнительных вычислительных устройств в контур управления.
Контроллер остается в работоспособном состоянии в процессе эксплуатации неподготовленным пользователем, в том числе при ошибочных или некорректных действиях (не связанных с механическим повреждением оборудования, вскрытием корпуса или нарушением правил безопасной эксплуатации). Конструкция разъемов на контроллере и соединителей должна исключать возможность неправильного присоединения и самопроизвольного разъединения.
Контроллер имеет возможность подключения сенсоров, мотор-редукторов и сервомеханизмов, предназначенных для конструирования роботов.
- Основной процессор с максимальной тактовой частотой 375 МГц и отдельный периферийный процессор с тактовой частотой 24 МГц
- Основной процессор имеет 2 ядра, одно из которых предназначено для обработки видеопотока
- Оперативная память DDR2/mobile, Мб 256
- Встроенная FLASH-память, Мб 16
- Интерфейсы USB 2.0, WiFi b/g/n, Bluetooth, I2C, UART, microSD
- Два интерфейса видео-сенсоров: VGA 640х480
- Порты для подключения 2 микрофонов, аудиовыход
- Цветной дисплей ЖК-дисплей 2.1” TFT, разрешение 320*240 пикселей с возможностью программного управления изображением
- Цветной дисплей ЖК-дисплей 2.1” TFT, разрешение 320*240 пикселей с возможностью программного управления изображением
- Светодиодный индикатор 3-цветный (красный, оранжевый, зелёный)
- Разъемы для датчиков и сервоприводов amp 7-215460-4
- Разъёмы портов расширения - EDAC Series 345/395
- 6 программируемых кнопок
- Возможность подключения четырёх моторов постоянного тока 12Вх2А, наличие программно-аппаратной защиты от перегрузки по току на этих разъёмах
- 15 сигнальных портов общего назначения с питанием 3.3-5V, из них 6 должны работать в режиме аналогового входа
- Встроенные 3-х осевой акселерометр, 3-х осевой датчик угловых скоростей («гироскоп»), встроенный аудиокодек, встроенный аудиоусилитель
- 2 разъема подключения внешних модулей (кроме отдельного USB)
- Электропитание 7–12 В постоянного тока от внешнего сетевого адаптера, либо LiPo аккумулятора класса 3S
- Размеры контроллера в сборе — 123×78×25 мм, технологическая точность — 0,5%
- Набор питания, совместимый с контроллером
- Контроллер кибернетического конструктора по робототехнике, шт. 1
- Блок питания 5 А от сети 220 В с переходником для контроллера, шт. 1
- Аккумулятор LiPo 2200 мАч класса 3S, шт. 1
- Зарядное устройство, шт. 1
- Карта памяти microSD, шт. 1
- Адаптер microSD — SD, шт. 1
- USB-адаптер для microSD, шт. 1
- Датчик линии (с проводом и разъемом подключения к контроллеру), шт. 2
- Датчик касания (с проводом и разъемом подключения к контроллеру), шт. 2
- Датчик расстояния УЗ (с проводом и разъемом подключения к контроллеру). Измеряемая дистанция от 10 см до 256 см. Точность измерения — 1 см, шт. 2
- Датчик расстояния ИК (с проводом и разъемом подключения к контроллеру). Измеряемая дистанция от 10 см до 80 cм. Точность измерения — 1 см, шт. 2
- Видеомодуль OV7670 (с проводом подключения). Разрешение 640×480, 30 кадров в секунду, в корпусе с креплением, шт. 1
- Микрофон (с проводом подключения). Частотный диапазон от 100 до 10000 Гц, тип разъема мини-джек Ø 3.5 мм, шт. 1
- LED-лента 20 см, шт. 1
- Сервопривод цифровой с ограничением 180° (с проводом и разъемом подключения к контроллеру). Выходной крутящий момент 0,95 Н×м, металлический передаточный механизм, шт. 2
- Хват для манипулятора, шт. 1
- Силовой мотор с энкодером (с проводом и разъемом подключения к контроллеру): мотор-редуктор, 100 об/мин при 12 В, точность замера угла поворота энкодером — 360 отсчетов на оборот вала редуктора, питание энкодера — 3–5 В, шт. 4
- Набор переходников к серводвигателям Наличие
- Насадка алюминиевая на сервопривод, шт. 2
- Переходник на сервопривод: пластиковая ножка, шт. 1
- Переходник на сервопривод: пластиковый квадрат, шт. 2
- Колесо малое с креплением на ось 4 мм, шт. 4
- Колесо большое с креплением на ось 4 мм, шт. 2
- Омниколеса, упаковка 4 шт с креплениями на ось 4 мм, шт. 1
- Пассивное колесо шарнирного типа, шт. 2
- Набор крепежа
- Комплект инструментов
- Набор пластиковых шестерней
- Набор креплений на оси
- Набор металлических осей
- Набор металлических деталей, перфорация с шагом 10 мм под крепежные элементы с диаметром 4 мм, толщина 0,7 мм
- Коннектор Micro-Match, шт. 10
- Провод папа-папа, шт. 40
- UART (последовательный порт с проводом подключения к контроллеру), шт. 1
Кибернетический конструктор по робототехнике позволяет собирать роботов на основе передовых технологий мирового уровня, создавать различные модели от простых радиоуправляемых до сложных современных кибернетических систем.
Контроллер кибернетического конструктора позволяет собирать автономные системы, способные захватывать и обрабатывать видео- и аудиопотоки без подключения дополнительных вычислительных устройств в контур управления.
Контроллер остается в работоспособном состоянии в процессе эксплуатации неподготовленным пользователем, в том числе при ошибочных или некорректных действиях (не связанных с механическим повреждением оборудования, вскрытием корпуса или нарушением правил безопасной эксплуатации). Конструкция разъемов на контроллере и соединителей должна исключать возможность неправильного присоединения и самопроизвольного разъединения.
Контроллер имеет возможность подключения сенсоров, мотор-редукторов и сервомеханизмов, предназначенных для конструирования роботов.

Добрый день! Присоединиться к курсу не могла, но очень хотелось бы посмотреть видео с уроков. Есть ли такая возможность?

ТРИК. Робототехнический конструктор запись закреплена
Старт 1 цикла бесплатных очных курсов для педагогов "Методика преподавания робототехники на базе кибернетического конструктора ТРИК" уже в следующий понедельник (13 июня)
На курсе вводятся базовые понятия и разбираются задачи для первого года обучения по направлению "Робототехника".
Курс предназначен для учителей информатики, технологии и физики, а также педагогов дополнительного образования.
Показать полностью.
Длительность: 36 часов.
Начальные требования к слушателям: уверенное владение компьютером.
На курсах будут предоставлены стационарные компьютеры и программное обеспечение, но лучше иметь свой ноутбук.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2
ТРИК. Робототехнический конструктор запись закреплена
Робоклешня из робототехнического конструктора ТРИК. В ней задействована еще одна наша технология – TRIK Gamepad.
TRIK Gamepad – это бесплатная программа-пульт для управления программируемыми роботами ТРИК.
Делитесь вашими идеями с нами и мы их опубликуем!
ТРИК. Робототехнический конструктор запись закреплена
По итогам конкурсного отбора лучшего отечественного учебного оборудования и средств обучения 2022 года "Модульный набор ТРИК для уроков технологии" получил знак отличия «Выбор педагогов».
Спасибо всем, кто выбрал нас!
ТРИК. Робототехнический конструктор запись закреплена
ТРИК. Робототехнический конструктор запись закреплена
С 27 июня по 02 июля пройдет III цикл курсов (для освоивших II цикл) для педагогов – "Методика преподавания робототехники на базе кибернетического конструктора ТРИК"
О чем курс?
На курсе разбираются задачи навигации, локализации, технического зрения, межагентного взаимодействия.
Показать полностью.
Категория слушателей: Данный курс предназначен для педагогов дополнительного образования.
Начальные требования: сертификат (или любое другое подтверждение) о прохождении второго цикла курса либо опыт преподавания робототехники от трех лет, уверенное владение синтаксисом одного из текстовых языков. Наличие собственного ноутбука.
Курс проходит только в очном формате. Трансляции не предполагается.
Длительность курсов: 36 часов.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2
ТРИК. Робототехнический конструктор запись закреплена
Вот такие вот интересные идеи из нашего металлического конструктора от наших подписчиков. Делитесь вашими проектами с нами и мы их опубликуем!

ТРИК. Робототехнический конструктор запись закреплена
20 - 25 июня состоится II цикл курсов (для освоивших I цикл) под руководством Широколобова Ильи Юрьевича – "Методика преподавания робототехники на базе кибернетического конструктора ТРИК"
О чем курс?
На курсе рассматриваются базовые задачи навигации, локализации, фильтрации, работы с массивами. В начале курса происходит небольшой экскурс по синтаксису Python и библиотеки управления роботами ТРИК.
Показать полностью.
Для кого курс?
Данный курс предназначен для педагогов дополнительного образования.
Начальные требования к слушателям:
Сертификат (или любое другое подтверждение) о прохождении первого цикла курса, либо опыт преподавания робототехники от двух лет, владение базовыми навыками программирования на любых текстовых языках (Pascal, Python, JavaScript и т.д.).
Курс проходит только в очном формате. Трансляции не предполагается.
Длительность курсов: 36 часов.
На курсах будут предоставлены стационарные компьютеры и программное обеспечение, но лучше иметь свой ноутбук.
Место проведения: ГБОУ Президентский ФМЛ №239.
Адрес: Санкт-Петербург, Кирочная 8, корпус 2

Кибернетический конструктор по робототехнике позволяет собирать роботов на основе передовых технологий мирового уровня, создавать различные модели

Набор для уроков технологии. Позволяет собрать четыре образовательных, интерактивных стенда для проведения исследовательских работ

Набор для подготовки к Олимпиаде Национальной технологической инициативы по профилю «Интеллектуальные робототехнические системы».

Набор для учебных заведений для дополнительного образования, внеурочной и урочной деятельности. Рассчитан на 4 учеников.


Набор для учебных заведений дополнительного образования, но также подойдет для внеурочной и урочной деятельности и прохождения курса «Основы программирования роботов».

Набор со всем необходимым для сборки своего первого робота! Это может быть и радиоуправляемая игрушка, и учебное пособие для изучения основ кибернетики и программирования.
ТРИК — это кибернетический конструктор для образования и творчества. В каждом наборе есть всё для сборки робота, умеющего слышать, видеть, разговаривать и выполнять сложные действия. В комплект входит контроллер ТРИК, металлический конструктор, бесплатное ПО и учебные материалы. На наборах обучаются в более 500 учебных заведениях, в том числе школах, университетах и Центрах молодежного инновационного творчества.
Наборы подходят для: урочной деятельности, внеурочной деятельности, дополнительного образования, частного использования.
Инновации в образовании Создание сайта Digital Agency Dial

Набор является расширенной версией набора ТРИК «Малый образовательный».
Рассчитан на 1−2 учеников.
Используя дополнительные моторы и сервоприводы, можно собрать коленчатый манипулятор. LED-лента поможет в демонстрации работы гироскопа и акселерометра и сделает ваши модели ярче. Дополнительные большие колеса пригодятся для сборки внедорожника для перемещения по неровной поверхности.
Для сборки автономных моделей в комплекте предусмотрен аккумулятор, поставляемый вместе с зарядным устройством.
КИБЕРНЕТИЧЕСКИЙ КОНСТРУКТОР ТРИК ОБРАЗОВАТЕЛЬНЫЙ 345688 Набор является расширенной версией набора ТРИК «Малый образовательный».
Рассчитан на 1−2 учеников.
Используя дополнительные моторы и сервоприводы, можно собрать коленчатый манипулятор. LED-лента поможет в демонстрации работы гироскопа и акселерометра и сделает ваши модели ярче. Дополнительные большие колеса пригодятся для сборки внедорожника для перемещения по неровной поверхности.
Для сборки автономных моделей в комплекте предусмотрен аккумулятор, поставляемый вместе с зарядным устройством.









Подпишись
Контакты
123022 г. Москва , ул. 2-я Звенигородская, д. 13, стр. 15,
Юр. адресс: 111397, г. Москва, Федеративный пр-кт, д. 4, кв. 47 офис XI
Мы работаем: c 09:00 до 18:00




LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2022 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.

Что общего между женской грудью и игрушечной железной дорогой? Правильно, и то, и то предназначено для детей, а играют с ними папы. Несколько дней назад я обзавёлся роботехническим конструктором ТРИК. Комплект довольно суровый, разработчики утверждают, что он хорош для быстрого прототипирования и для обучения, а именно (само-)обучение меня в данный момент и интересует.
Что сейчас широко доступно на рынке для робототехнических игр? Самодельное изготовление плат под каждый проект не рассматриваем. Лего, распи, ардуино. Лего прекрасен, но, к сожалению, очень и очень сильно ограничен. Распи и ардуины неплохо расширяются, но довольно неудобны и быстро превращаются в рассыпуху разных карточек-шильдиков-макеток. Вот тут и выходят на рынок питерские ребята со своим конструктором ТРИК.
Итак, моя задача понять, насколько это доступно широкой публике (мне). Я никогда не посещал лекций ни по теоретической кибернетике, ни по теории управления. Закон Ома я выучил ровно настолько, чтобы понять, что розетку лизать не стоит, и паяльник не является моим другом. Но как всякий нормальный (великовозрастный) ребёнок играть я люблю, и поэтому заинтересовался этой темой.
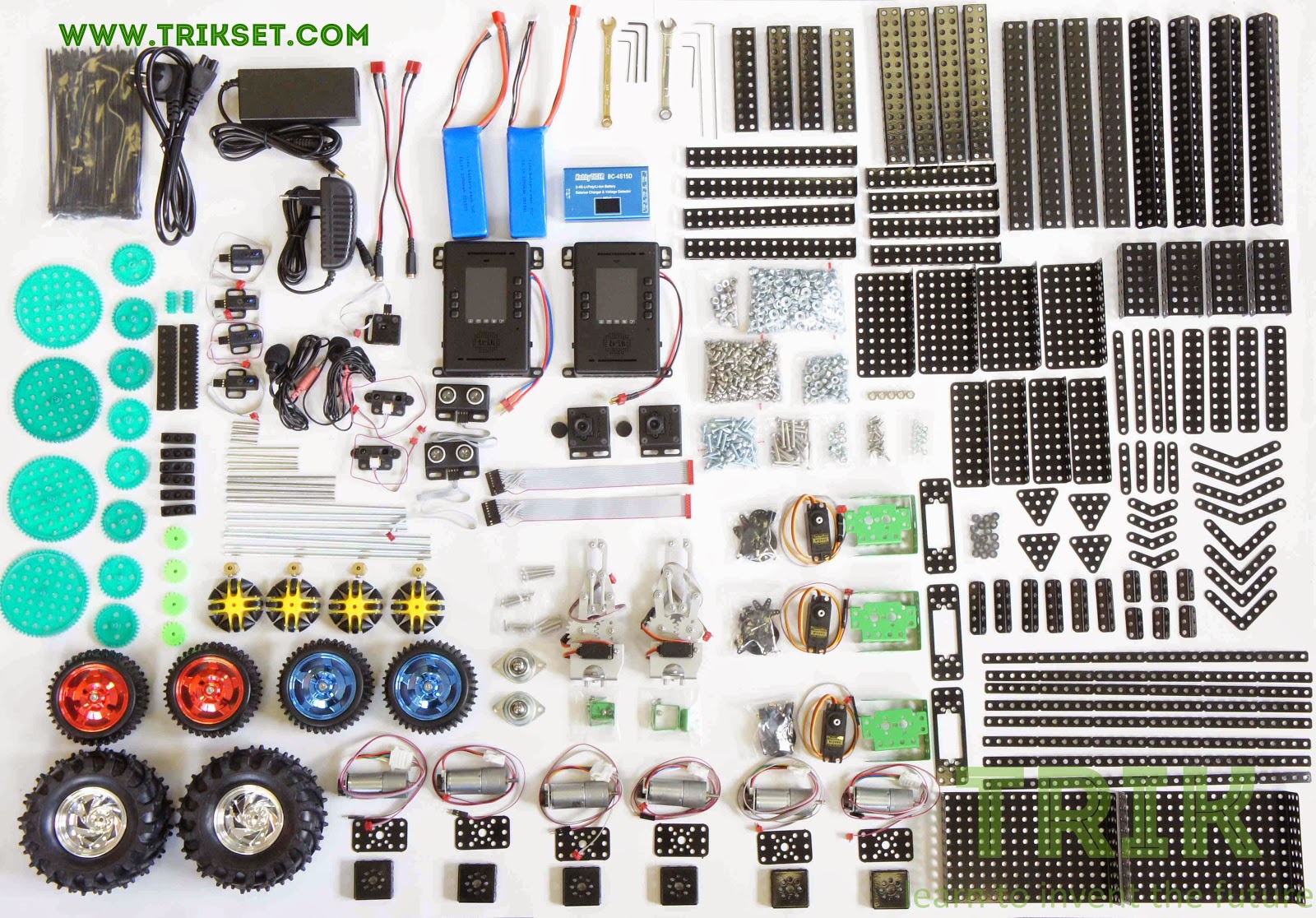
Я получил вот такой набор:
Вообще цена их наборов варьируется от примерно двадцати до семидесяти тысяч рублей. Дороже ли это, чем лего? Нет. Месяц назад я купил Lego EV3. Цена вопроса 370€ базовый набор + 100€ аккумулятор (они там совсем офигели?!) И это ещё я не считал зарядника за тридцать евро. Плюс ко всему в базовый набор не входят ни сонар (+35€), ни гироскоп (+35€). А уж про камеру с микрофоном и вообще можно забыть, не упоминая вообще в принципе отустствия доступа внутрь леговского линукса.

Вот так выглядит моя чудо-коробка:

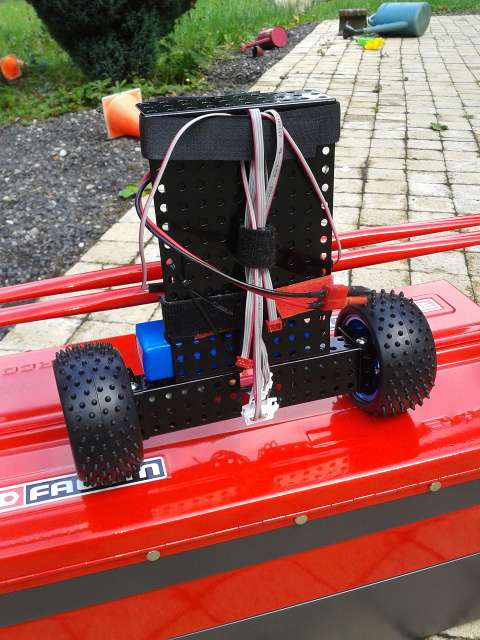
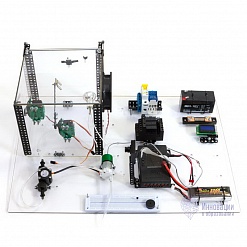
В качестве самого первого проекта я решил собрать обратный маятник, он и представлен на заглавной картинке. Вот так он выглядит сзади:
Из набора мне понадобилось два двигателя, два колеса, чуть крепежа и непосредственно контроллер с батареей. Моей целью не было скопировать туториал из обучающего курса ТРИК, мне интересно обломать зубы обо все проблемы самостоятельно, поэтому я буду изобретать велосипед.
Итак, в моём распоряжении одна степень свободы, акселерометр и гироскоп, энкодеры от двигателей я не использовал. Писать буду на Qt Script.
Изначально я хотел обойтись одним акселерометром. Типа, читаю знак проекции на ось Z, если он положительный, то кручу колёса в одну сторону, если отрицательный, то в другую. В теории всё хорошо, но сделав это, добился только дикого дрыганья моей тележки. Вздохнул и сел штудировать литературу, благо, что она оказалась не сильно долгой. Итак, меня интересует только угол отклонения тележки от вертикали.
Гироскоп
Он же датчик угловых скоростей, выдаёт хороший плавный сигнал, но чтобы отследить с его помощью ориентацию в пространстве, скорости нужно интегрировать. Изначально скорости выдаются с погрешностью, интеграция вносит ещё ошибок, что в итоге приведёт к уплыванию показаний гироскопа. Поэтому только гироскопа нам для маятника недостаточно, нужно его комбинировать с акселерометром.
Вот мой код работы с гироскопом, здесь while(true) — основной цикл программы.
В массив G я читаю значения датчика, в следующей строчке произвожу коррекцию интересующей меня оси. Выясняется, что мой конкретно датчик в полном покое показывает в среднем скорость в 69 единиц, поэтому я их вычитаю, чтобы получить интересующую меня скорость.
Датчик выдаёт целое число, которое нужно перевести в углы. В штатном режиме он работает на 2000 градусов/сек (dps). Даташит говорит, что этому соответствует константа в 70mdps/digit. Таким образом, G(digits) * 0.07 (dps/digit) даёт нам угловую скорость. Осталось её проинтегрировать, умножив на время измерения dt.
Акселерометр
Из акселерометра угол получить ещё проще, однако проблема в том, что уж больно он шумный, а уж когда тележка начинаёт дёргаться туда-сюда, вообще туши свет. Вот так выглядит код:
Гасим шум: совмещение показаний акселерометра и гироскопа
Это просто говорит, что значение текущего угла это на 98% значение предыдущего угла с поправкой от гироскопа, а на 2% — это прямое чтение угла от акселерометра. Такое совмещение позволяет бороться с уплыванием гироскопа, обратите внимание, что переменную gyr_x_angle мы тут вообще не использовали.
Как я уже говорил, я не посещал умных лекций по теории управления, поэтому LQR-регуляторы мне не по зубам за разумное (пара часов) время. А вот ПИД вполне подойдёт.
В предыдущем параграфе мы получили пристойную (я надеюсь) оценку угла отклонения тележки от вертикали. Улучшить её можно, используя фильтрацию Калмана, но это стрельба из пушки по воробьям. Теперь пришло время крутить колёса — чем больше угол отклонения, тем быстрее нужно крутить колесо.
Скорость вращения колеса, которую нам выдаст ПИД, состоит из трёх (взвешенных) слагаемых: пропорциональной, интегирующей и дифференцирующей. Пропорциональная просто равна углу отклонения от вертикали, интегрирующая — это сумма всех ошибок регулирования, а дифференцирующая пропорциональна скорости изменения отклонения от вертикали.
Звучит это страшно, а на деле код крайне простой:
Выбор констант KP, KI, KD
Осталась самая сложная часть: найти значения весов в сумме, к сожалению, это можно только делать эмпирически.
Для начала найдём коэффициент KP. Положим KI и KD равными нулю и увеличиваем KP начиная с нуля до того момента, когда наша тележка начнёт совершать (примерно) постоянные колебания, примерно вот так (KP=8, KI=0, KD=0):
Очевидно, что это перебор, тележка получает слишком сильный сигнал от пропорциональной составляющей, поэтому уменьшим её примерно вполовину, получим вот это (KP=5, KI=0, KD=0):
Теперь тележке не хватает чисто пропорционального сигнала, увеличим её скорость, добавив интегрирующей компоненты. Плавно увеличиваем KI с нуля, пытаясь достигнуть момента, когда снова получим колебания тележки вокруг желаемого положения (KP=5, KI=0.5, KD=0):
Теперь добавляем дифференцирующую компоненту, которая будет играть роль демпфера, гася колебания, вот что у меня получается (KP=5, KI=0.5, KD=5):
У меня довольно быстро (за один вечер) получилась самобалансирующаяся тележка. Учитывая, что программа у меня получилась аж в двадцать пять строк, то теперь на досуге осталось добавить управление тележкой, повороты и прохождение полосы препятствий, это не должно составить больших сложностей.
Ни электротехнического, ни кибернетического бэкграунда у меня нет, то есть, это вполне доступно рядовым пользователям, что, собственно, мне и очень интересно. Буду продолжать изучение!
По сравнению с тем же леговским набором оно всё, конечно, выглядит несколько топорнее, китайские датчики (как и у лего), но не закатанные в толстенный качественный леговский пластик. Менее вылизанный софт, который находится в активной разработке. Существенно меньше сообщество людей, программирующих на этом контроллере, но учитывая, что проекту без году неделя, да ещё видя недавний успех ардуино, это меня мало пугает. Зато меня восхищает гибкость контроллера, которая получилась из потрясающго энтузиазма, с которым в Питере взялись за разработку.
Читайте также: