
Конструктор для обучения и проведения соревнований роботов
Обновлено: 01.05.2024
Набор для учебных заведений для дополнительного образования, внеурочной и урочной деятельности.
Рассчитан на 4 учеников.
«Учебная пара» состоит из двух контроллеров ТРИК и всех необходимых комплектующих для создания двух учебно-соревновательных моделей. С этими моделями в рамках образовательного процесса вы можете организовать соревнования по различным правилам, включая «Следование по линии», «Линию-профи», «Эстафету».
Набор подходит для учебных заведений, оборудуемых по проектам «Инженерный класс», «IT-полигон», «Робоклассы», «Академический класс» и может быть использован в качестве основы лотов «Конструктор для обучения и проведения соревнований роботов», «„Учебная пара“ микроэлектроника и схемотехника».
- Большая пластиковая коробка
- Контроллер 2 шт.
- Блок питания 5А
- Блок питания 2А
- Видеомодуль ("глаз") - 2 шт.
- Микрофон (с проводом подключения) - 2 шт.
- Сервопривод угловой -180 гр. - 3 шт.
- Мотор-редктор постоянного тока с квадратурным энкодером - 6 шт.
- Датчик линии - 4 шт.
- Датчик касания - 2 шт.
- Датчик расстояния - УЗ - 2 шт.
- Датчик расстояния - ИК - 2 шт.
- Ось 25 мм - 4 шт.
- Ось 65 мм - 4 шт.
- Ось 100 мм - 4 шт.
- Ось 165 мм - 4 шт.
- Ось 190 мм - 4 шт.
- Шестерёнка малая (16 зубьев) - 4 шт.
- Шестерёнка средняя (32 зуба) - 8 шт.
- Шестерёнка большая (64 зуба) - 2 шт.
- Червячная пара - 2 шт.
- Реечная передача - 2 шт.
- Колесо малое - 4 шт.
- Пассивное колесо - 2 шт.
- Омниколесо ("всенаправленное") - 4 шт.
- Хват для манипулятора - 2 шт.
- Аккумулятор средний 2200mAh - 2 шт.
- Устройство зарядное
- 160 Металличесих деталей ТРИК для сборки моделей (балки, углы, пластины, адаптеры крепления моторов и пр.)
Набор для учебных заведений для дополнительного образования, внеурочной и урочной деятельности.
Рассчитан на 4 учеников.
«Учебная пара» состоит из двух контроллеров ТРИК и всех необходимых комплектующих для создания двух учебно-соревновательных моделей. С этими моделями в рамках образовательного процесса вы можете организовать соревнования по различным правилам, включая «Следование по линии», «Линию-профи», «Эстафету».
Набор подходит для учебных заведений, оборудуемых по проектам «Инженерный класс», «IT-полигон», «Робоклассы», «Академический класс» и может быть использован в качестве основы лотов «Конструктор для обучения и проведения соревнований роботов», «„Учебная пара“ микроэлектроника и схемотехника».

Что общего между женской грудью и игрушечной железной дорогой? Правильно, и то, и то предназначено для детей, а играют с ними папы. Несколько дней назад я обзавёлся роботехническим конструктором ТРИК. Комплект довольно суровый, разработчики утверждают, что он хорош для быстрого прототипирования и для обучения, а именно (само-)обучение меня в данный момент и интересует.
Что сейчас широко доступно на рынке для робототехнических игр? Самодельное изготовление плат под каждый проект не рассматриваем. Лего, распи, ардуино. Лего прекрасен, но, к сожалению, очень и очень сильно ограничен. Распи и ардуины неплохо расширяются, но довольно неудобны и быстро превращаются в рассыпуху разных карточек-шильдиков-макеток. Вот тут и выходят на рынок питерские ребята со своим конструктором ТРИК.
Итак, моя задача понять, насколько это доступно широкой публике (мне). Я никогда не посещал лекций ни по теоретической кибернетике, ни по теории управления. Закон Ома я выучил ровно настолько, чтобы понять, что розетку лизать не стоит, и паяльник не является моим другом. Но как всякий нормальный (великовозрастный) ребёнок играть я люблю, и поэтому заинтересовался этой темой.
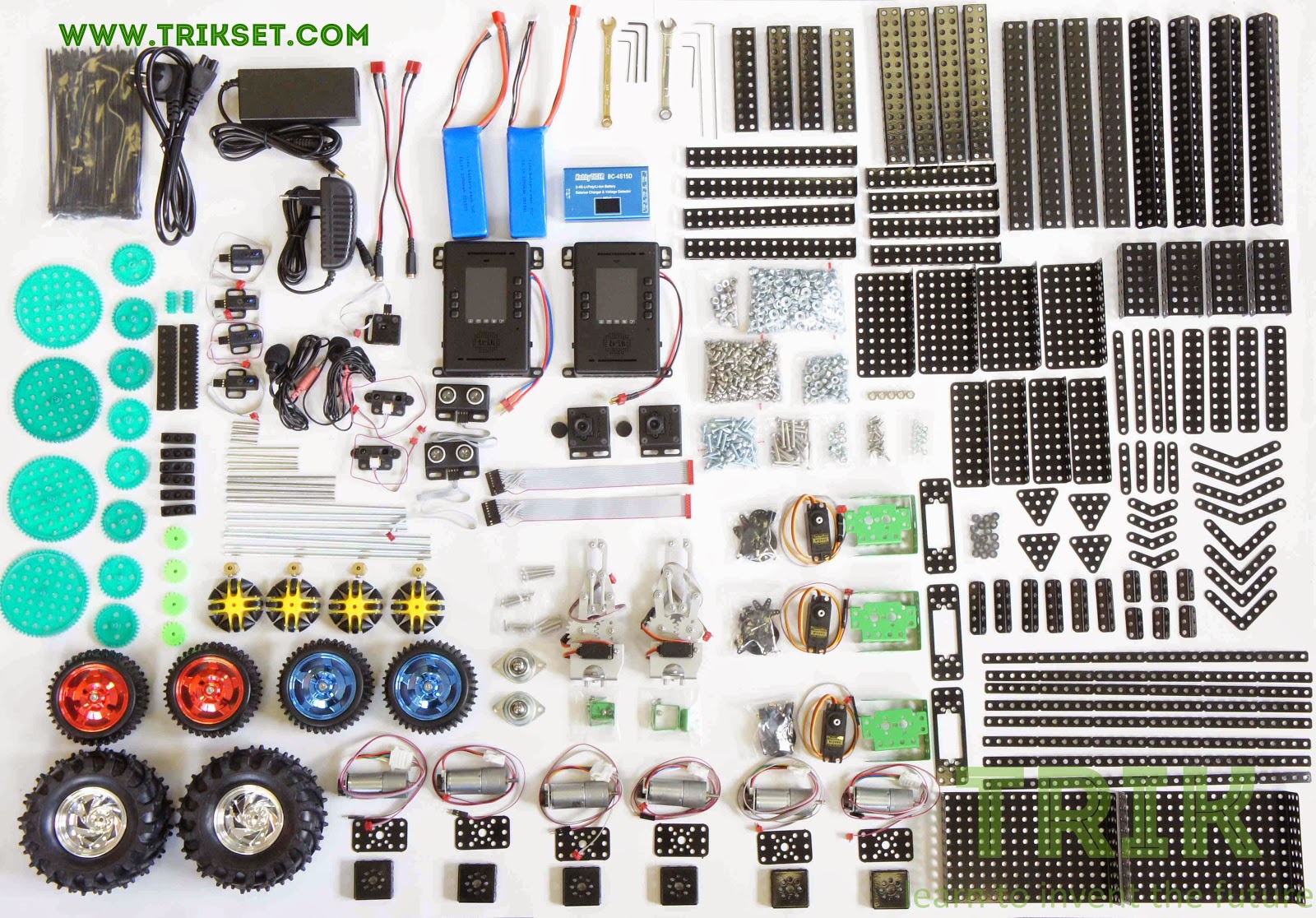
Я получил вот такой набор:
Вообще цена их наборов варьируется от примерно двадцати до семидесяти тысяч рублей. Дороже ли это, чем лего? Нет. Месяц назад я купил Lego EV3. Цена вопроса 370€ базовый набор + 100€ аккумулятор (они там совсем офигели?!) И это ещё я не считал зарядника за тридцать евро. Плюс ко всему в базовый набор не входят ни сонар (+35€), ни гироскоп (+35€). А уж про камеру с микрофоном и вообще можно забыть, не упоминая вообще в принципе отустствия доступа внутрь леговского линукса.

Вот так выглядит моя чудо-коробка:

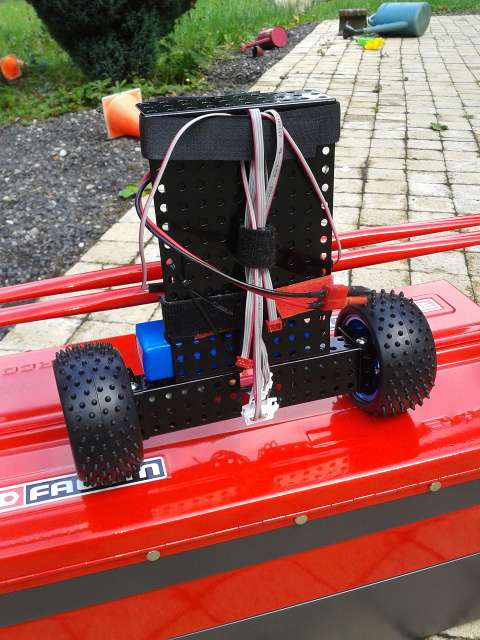
В качестве самого первого проекта я решил собрать обратный маятник, он и представлен на заглавной картинке. Вот так он выглядит сзади:
Из набора мне понадобилось два двигателя, два колеса, чуть крепежа и непосредственно контроллер с батареей. Моей целью не было скопировать туториал из обучающего курса ТРИК, мне интересно обломать зубы обо все проблемы самостоятельно, поэтому я буду изобретать велосипед.
Итак, в моём распоряжении одна степень свободы, акселерометр и гироскоп, энкодеры от двигателей я не использовал. Писать буду на Qt Script.
Изначально я хотел обойтись одним акселерометром. Типа, читаю знак проекции на ось Z, если он положительный, то кручу колёса в одну сторону, если отрицательный, то в другую. В теории всё хорошо, но сделав это, добился только дикого дрыганья моей тележки. Вздохнул и сел штудировать литературу, благо, что она оказалась не сильно долгой. Итак, меня интересует только угол отклонения тележки от вертикали.
Гироскоп
Он же датчик угловых скоростей, выдаёт хороший плавный сигнал, но чтобы отследить с его помощью ориентацию в пространстве, скорости нужно интегрировать. Изначально скорости выдаются с погрешностью, интеграция вносит ещё ошибок, что в итоге приведёт к уплыванию показаний гироскопа. Поэтому только гироскопа нам для маятника недостаточно, нужно его комбинировать с акселерометром.
Вот мой код работы с гироскопом, здесь while(true) — основной цикл программы.
В массив G я читаю значения датчика, в следующей строчке произвожу коррекцию интересующей меня оси. Выясняется, что мой конкретно датчик в полном покое показывает в среднем скорость в 69 единиц, поэтому я их вычитаю, чтобы получить интересующую меня скорость.
Датчик выдаёт целое число, которое нужно перевести в углы. В штатном режиме он работает на 2000 градусов/сек (dps). Даташит говорит, что этому соответствует константа в 70mdps/digit. Таким образом, G(digits) * 0.07 (dps/digit) даёт нам угловую скорость. Осталось её проинтегрировать, умножив на время измерения dt.
Акселерометр
Из акселерометра угол получить ещё проще, однако проблема в том, что уж больно он шумный, а уж когда тележка начинаёт дёргаться туда-сюда, вообще туши свет. Вот так выглядит код:
Гасим шум: совмещение показаний акселерометра и гироскопа
Это просто говорит, что значение текущего угла это на 98% значение предыдущего угла с поправкой от гироскопа, а на 2% — это прямое чтение угла от акселерометра. Такое совмещение позволяет бороться с уплыванием гироскопа, обратите внимание, что переменную gyr_x_angle мы тут вообще не использовали.
Как я уже говорил, я не посещал умных лекций по теории управления, поэтому LQR-регуляторы мне не по зубам за разумное (пара часов) время. А вот ПИД вполне подойдёт.
В предыдущем параграфе мы получили пристойную (я надеюсь) оценку угла отклонения тележки от вертикали. Улучшить её можно, используя фильтрацию Калмана, но это стрельба из пушки по воробьям. Теперь пришло время крутить колёса — чем больше угол отклонения, тем быстрее нужно крутить колесо.
Скорость вращения колеса, которую нам выдаст ПИД, состоит из трёх (взвешенных) слагаемых: пропорциональной, интегирующей и дифференцирующей. Пропорциональная просто равна углу отклонения от вертикали, интегрирующая — это сумма всех ошибок регулирования, а дифференцирующая пропорциональна скорости изменения отклонения от вертикали.
Звучит это страшно, а на деле код крайне простой:
Выбор констант KP, KI, KD
Осталась самая сложная часть: найти значения весов в сумме, к сожалению, это можно только делать эмпирически.
Для начала найдём коэффициент KP. Положим KI и KD равными нулю и увеличиваем KP начиная с нуля до того момента, когда наша тележка начнёт совершать (примерно) постоянные колебания, примерно вот так (KP=8, KI=0, KD=0):
Очевидно, что это перебор, тележка получает слишком сильный сигнал от пропорциональной составляющей, поэтому уменьшим её примерно вполовину, получим вот это (KP=5, KI=0, KD=0):
Теперь тележке не хватает чисто пропорционального сигнала, увеличим её скорость, добавив интегрирующей компоненты. Плавно увеличиваем KI с нуля, пытаясь достигнуть момента, когда снова получим колебания тележки вокруг желаемого положения (KP=5, KI=0.5, KD=0):
Теперь добавляем дифференцирующую компоненту, которая будет играть роль демпфера, гася колебания, вот что у меня получается (KP=5, KI=0.5, KD=5):
У меня довольно быстро (за один вечер) получилась самобалансирующаяся тележка. Учитывая, что программа у меня получилась аж в двадцать пять строк, то теперь на досуге осталось добавить управление тележкой, повороты и прохождение полосы препятствий, это не должно составить больших сложностей.
Ни электротехнического, ни кибернетического бэкграунда у меня нет, то есть, это вполне доступно рядовым пользователям, что, собственно, мне и очень интересно. Буду продолжать изучение!
По сравнению с тем же леговским набором оно всё, конечно, выглядит несколько топорнее, китайские датчики (как и у лего), но не закатанные в толстенный качественный леговский пластик. Менее вылизанный софт, который находится в активной разработке. Существенно меньше сообщество людей, программирующих на этом контроллере, но учитывая, что проекту без году неделя, да ещё видя недавний успех ардуино, это меня мало пугает. Зато меня восхищает гибкость контроллера, которая получилась из потрясающго энтузиазма, с которым в Питере взялись за разработку.
Сейчас мы готовим новую площадку для детских занятий. В процессе подготовки стал вопрос выбора платформы, на которой будем обучать. По такому случаю мы подготовили обзор имеющихся платформ с обоснованием выбора. Документ, вроде, интересный получился, решил его здесь опубликовать. Некоторые вещи изложены сильно упрощенно, поскольку текст предназначен не только для хардкорных технарей.
- Большая методическая база на русском языке;
- От преподавателя требуется не очень высокая квалификация;
- Конструктор очень прочный, детям редко удается что-то сломать.
- Изначально это все-таки детский конструктор, для серьезных задач не предназначенный;
- Конструктор закрытый, ни с чем не совместим, производитель искусственно создает препятствия к тому, чтобы можно было цеплять к нему компоненты других конструкторов и разрабатывать собственные компоненты;
- Программировать можно либо в визуальных средах программирования, либо на С++.
Fishertechnic
Есть и другие конструкторы, основной смысл которых — демонстрировать детям какие-то отдельные интересные инженерные элементы. Они имеют достаточно узкое применение, мы их особо не изучали.
Стоимость Fishertechnic примерно соответствует стоимости Лего.
Arduino
Arduino — самая распространенная платформа для взрослой робототехники и электроники, вторая по распространённости среди детей. Разработка полностью открытая, у нее есть множество ответвлений.
Raspberry Pi и аналоги
Raspberry Pi — это компьютер под управлением операционной системы Linux, имеющий размеры баковской карты. На нем можно запускать те же программы, делать те же вычисления, что и на настольном компьютере (есть видеовыходы, аудиовыходы, USB). Малые размеры вкупе с низким энергопотреблением позволяют устанавливать его на подвижных роботов.
Raspberry поддерживает язык программирования Python. Это наиболее перспективный учебный язык программирования. На западе учебные заведения постепенно переводят на него свои учебные программы. Поддержка этого языка, по нашему мнению, является главным достоинством Raspberry.
- По сравнению с Ардуино, Raspberry имеет примерно в два раза более высокую стоимость;
- Подключать внешние устройства (датчики, моторчики) к ней существенно сложнее, если не использовать специальные модули расширения.
Например, может быть реализован следующий сценарий использования: сначала, когда ребенок только начинает заниматься робототехникой, он работает с Ардуино в графической среде программирования; далее, когда он вырастает из графической среды, подключаем к ардуине Raspberry, и ребенок начинает программировать на Python, использовать различные дополнительные возможности. Если дорогая Raspberry недоступна, ребенок может программировать имеющуюся ардуину на С++.
Механические конструкторы для Arduino и Raspberri
На наш взгляд, наиболее перспективным является недавно появившийся конструктор Multiplo. В отличии от других конструкторов у него основные детали не металлические, а вырезаны из трехмиллиметрового пластика. Благодаря этому их можно вырезать самостоятельно на специальном станке (тем более, что 3Д-модели деталей выложены в открытый доступ, проект опенсорсный). Если специальный станок недоступен, детали можно вырезать руками с помощью лобзика и дрели.
Помимо винтов в Multiplo широко используются пластиковые заклепки, благодаря этому собирать конструктор гораздо интереснее и быстрее.
Стоимость Huna с Ардуино на борту примерно соответствует стоимости Лего. Стоимость Multiplo с Ардуино на борту примерно в полтора раза ниже.
- У детей развивается мелкая моторика;
- Нигде на производстве не используются крепления как в Лего, везде крепеж на винтах.
Заключение
Мы остановились на варианте arduino + Raspberry Pi + конструктор Multiplo.
До седьмого класса нужно что-то другое, этот вопрос мы пока мало изучали.
Если стоит задача привить интерес к каким-то узким отраслям промышленности, то нужен Fishertechnic или аналог.
Если стоит задача научить детей самих нарезать и печатать детали, то за основу лучше брать Multiplo.

«Учебная пара» состоит из двух контроллеров ТРИК и всех необходимых комплектующих для создания двух учебно-соревновательных моделей. С этими моделями в рамках образовательного процесса вы можете организовать соревнования по различным правилам, включая «Следование по линии», «Линию-профи», «Эстафету».
Набор подходит для учебных заведений, оборудуемых по проектам «Инженерный класс», «IT-полигон», «Робоклассы», «Академический класс» и может быть использован в качестве основы лотов «Конструктор для обучения и проведения соревнований роботов», «„Учебная пара“ микроэлектроника и схемотехника».
КИБЕРНЕТИЧЕСКИЙ КОНСТРУКТОР ТРИК УЧЕБНАЯ ПАРА 345687 «Учебная пара» состоит из двух контроллеров ТРИК и всех необходимых комплектующих для создания двух учебно-соревновательных моделей. С этими моделями в рамках образовательного процесса вы можете организовать соревнования по различным правилам, включая «Следование по линии», «Линию-профи», «Эстафету».
Набор подходит для учебных заведений, оборудуемых по проектам «Инженерный класс», «IT-полигон», «Робоклассы», «Академический класс» и может быть использован в качестве основы лотов «Конструктор для обучения и проведения соревнований роботов», «„Учебная пара“ микроэлектроника и схемотехника».









Подпишись
Контакты
123022 г. Москва , ул. 2-я Звенигородская, д. 13, стр. 15,
Юр. адресс: 111397, г. Москва, Федеративный пр-кт, д. 4, кв. 47 офис XI
Мы работаем: c 09:00 до 18:00




LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2022 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.

Кибернетический конструктор по робототехнике позволяет собирать роботов на основе передовых технологий мирового уровня, создавать различные модели

Набор для уроков технологии. Позволяет собрать четыре образовательных, интерактивных стенда для проведения исследовательских работ

Набор для подготовки к Олимпиаде Национальной технологической инициативы по профилю «Интеллектуальные робототехнические системы».

Набор для учебных заведений для дополнительного образования, внеурочной и урочной деятельности. Рассчитан на 4 учеников.


Набор для учебных заведений дополнительного образования, но также подойдет для внеурочной и урочной деятельности и прохождения курса «Основы программирования роботов».

Набор со всем необходимым для сборки своего первого робота! Это может быть и радиоуправляемая игрушка, и учебное пособие для изучения основ кибернетики и программирования.
ТРИК — это кибернетический конструктор для образования и творчества. В каждом наборе есть всё для сборки робота, умеющего слышать, видеть, разговаривать и выполнять сложные действия. В комплект входит контроллер ТРИК, металлический конструктор, бесплатное ПО и учебные материалы. На наборах обучаются в более 500 учебных заведениях, в том числе школах, университетах и Центрах молодежного инновационного творчества.
Наборы подходят для: урочной деятельности, внеурочной деятельности, дополнительного образования, частного использования.
Инновации в образовании Создание сайта Digital Agency Dial
Читайте также: