
Конструктор робот ларт печенег батана
Обновлено: 29.04.2024
Конструктор Печенег Батана на контроллере Arduino - мощная система для строительства роботов. В комплекте 4 мотор-редуктора, энкодеры, датчики линии и расстояний.
Конструкционные элементы позволяют построить шасси робота как четырехмоторного, так и двухмоторного с шариковой опорой. Датчики дают роботу возможность объезжать препятствия, реагировать на внешнее освещение и звук.
Набор состоит из блока управления LART R-5 с контроллером Arduino Nano, датчиков, электромоторов, деталей металлического каркаса и крепежных элементов. Детали шасси изготовлены из листового металла толщиной 0,8 мм и способны нести достаточно высокую механическую нагрузку.
Размер штатных крепежных отверстий составляет 3,5 мм. На пластине размещены дополнительные отверстия диаметром 4,5 мм и шагом. 10 мм.
Контроллер Arduino прост в освоении программирования. Не требует платных лицензий. Подросток без помощи профессиональных инженеров и программистов сможет самостоятельно собирать и программировать роботов. От простых моделей роботов, следующих по заданной траектории, до сложных кибернетических систем.
Детали шасси конструктора выполнены из листового металлического листа. На листе размещены отверстия для крепления элементов робота (3,5 мм). Также на листе размещены отверстия 4,5 мм и шагом 10 мм. Это стандартные размеры для всех металлических конструкторов.
Управление роботом осуществляется контроллером Arduino nano. Плата устанавливается в колодки блока управления R-5. Программирование контроллера осуществляется в среде разработки Arduino IDE. Набор деталей конструктора позволяет собрать две базовых модели роботов - следующий по черной линии и по лабиринту.
КОМПЛЕКТАЦИЯ:
Пластина металлическая несущая - 1 шт.
Пластина металлическая дополнительная - 1 шт.
Пластина акриловая - 1 шт.
Уголок крепления мотора - 4 шт.
Мотор с редуктором Т-130 ( 1:48, 250 rpm) - 4 шт.
Пластиковое колесо - 4 шт.
Шариковая опора - 1 шт.
Сервомотор SG90 - 1 шт.
Блок управления R-5 - 1 шт.
Контроллер Arduino Nano - 1шт.
USB кабель - 1 шт.
УЗ датчик HC-SR04 - 1 шт.
Модуль «пищалка» - 1 шт.
Модуль «светодиод» - 2 шт.
Модуль «кнопка» - 1 шт.
Датчик линии - 2 шт.
Микрофонный датчик - 1 шт.
Энкодер - 2 шт.
Светодиод красный 5 мм - 10 шт.
Светодиод желтый 5 мм - 2 шт.
Светодиод зеленый 5 мм - 2 шт.
Светодиод RGB - 1 шт.
Резистор 0,5 Вт 360 Ом -10 шт.
Резистор 0,5 Вт 1 кОМ - 4 шт.
Резистор 0,5 Вт 10 кОМ - 4 шт.
Резистор 0,5 Вт 30 кОМ - 4 шт.
Фоторезистор - 1 шт.
Батарейный отсек на 6 бат. АА - 1 шт.
Макетная плата - 1 шт.
Пластиковый держатель УЗ датчика - 1 шт.
Винт М3 х 6 - 50 шт.
Винт М2 х 4 - 2 шт.
Винт М3 х 24 - 8 шт.
Гайка М3 - 10 шт.
Гайка М2 - 2 шт.
Стойка мет. 10 мм - 8 шт.
Стойка мет. 20 мм - 4 шт.
Стойка мет. 35 мм - 2 шт.
Стойка мет. 40 мм - 4 шт.
Комплект соединительных проводов - 1 к-т
CD диск - 1 шт.
Шасси состоит из комплекта металлических деталей, 4-х мотор-редукторов, шариковой опоры и крепежных элементов. Несущая и дополнительная пластины выполнены их стального листа толщиной 0,8 мм. 4 уголка для крепления электромоторов выполнены так же их листовой стали толщиной 1 мм. Окраска деталей порошковая. Перфорация несущей и дополнительных пластин выполнена с учетом установки на них деталей конструктора с диаметром отверстий 3,5 мм. Свободное от штатных отверстий пространство пластин перфорировано отверстиями 4,2 мм с шагом 10 мм. Размещение отверстий 4,2 мм дает возможность применять в качестве дополнительных строительных компонентов применять детали широко распространенных обычных металлических конструкторов. Электромоторы сопряжены в одном корпусе с понижающим редуктором. Передаточное отношение редуктора 1:48. Количество оборотов на выходном валу редуктора без нагрузки 230 об/мин.
Блок управления.
Блок управления ЛАРТ R-5 — модуль состоящий из микроконтроллера Arduino Nano, драйвера моторов на микросхеме 74HC00D и двух L293D, стабилизатора питания L7805 и расширителя портов. Новая модификация блока управления R-5M снабжена DC-DC преобразователем и обеспечивает наиболее эффективное использование батареек. Робот сохраняет работоспособность при напраяжении батареи 4-5 Вольт.
Комплект модулей и датчиков.
Датчики и модули конструктора предназначены для конструирования робота под конкретные задачи. Датчик препятствий помогают роботу обнаруживать препятствия и успешно их обходить. Датчик звука — для реагирования робота на различные звуковые эффекты. Энкодеры для исчисления пройденного расстояния.
Макетный модуль.
Перед тем, как приступить к сборке и программированию роботов из конструктора можно собрать макетный модуль и потренироваться в программировании простых устройств. В комплекте есть светодиоды, резисторы и другие электронные компоненты для различных экспериментов.
Металлическое шасси конструктора, 4 мощных электромотора с редуктором, контроллер Arduino, набор датчиков. Все это превращает обычный металлический конструктор во многофункциональный универсальный робототехнический комплекс.
Конструктор Печенег Батана на контроллере Arduino достаточно мощная система для строительства роботов. В комплекте 4 мотор-редуктора, энкодеры, датчики линии и расстояний. Конструкционные элементы позволяют построить шасси робота, как четырехмоторного, так и двухмоторного с шариковой опорой. Датчики позволяют роботу объезжать препятствия, реагировать на внешнее освещение и звук. ЛАРТ — довольно сложные конструкторы отечественного производства, предназначенные для продвинутого пользователя.
Металлическое шасси робота.
Шасси состоит из комплекта металлических деталей, 4-х мотор-редукторов, шариковой опоры и крепежных элементов. Несущая и дополнительная пластины выполнены их стального листа толщиной 0,8 мм. 4 уголка для крепления электромоторов выполнены так же их листовой стали толщиной 1 мм. Окраска деталей порошковая. Перфорация несущей и дополнительных пластин выполнена с учетом установки на них деталей конструктора с диаметром отверстий 3,5 мм. Свободное от штатных отверстий пространство пластин перфорировано отверстиями 4,2 мм с шагом 10 мм. Размещение отверстий 4,2 мм дает возможность применять в качестве дополнительных строительных компонентов применять детали широко распространенных обычных металлических конструкторов. Электромоторы сопряжены в одном корпусе с понижающим редуктором. Передаточное отношение редуктора 1:48. Количество оборотов на выходном валу редуктора без нагрузки 230 об/мин.
Блок управления.
Блок управления ЛАРТ R-5 — модуль состоящий из микроконтроллера Arduino Nano, драйвера моторов на микросхеме 74HC00D и двух L293D, стабилизатора питания L7805 и расширителя портов. Новая модификация блока управления R-5M снабжена DC-DC преобразователем и обеспечивает наиболее эффективное использование батареек. Робот сохраняет работоспособность при напраяжении батареи 4-5 Вольт.
Комплект модулей и датчиков.
Датчики и модули конструктора предназначены для конструирования робота под конкретные задачи. Датчик препятствий помогают роботу обнаруживать препятствия и успешно их обходить. Датчик звука — для реагирования робота на различные звуковые эффекты. Энкодеры для исчисления пройденного расстояния.
Макетный модуль.
Перед тем, как приступить к сборке и программированию роботов из конструктора можно собрать макетный модуль и потренироваться в программировании простых устройств. В комплекте есть светодиоды, резисторы и другие электронные компоненты для различных экспериментов.
Металлическое шасси конструктора, 4 мощных электромотора с редуктором, контроллер Arduino, набор датчиков. Все это превращает обычный металлический конструктор во многофункциональный универсальный робототехнический комплекс.

Металлическое шасси конструктора, 4 мощных электромотора с редуктором, контроллер Арудино, набор датчиков. Все это превращает обычный металлический конструктор во многофункциональный универсальный робототехнический комплекс.
Металлическое шасси робота.
Шасси состоит из комплекта металлических деталей, 4-х мотор-редукторов, шариковой опоры и крепежных элементов.
Несущая и дополнительная пластины выполнены их стального листа толщиной 0,8 мм. 4 уголка для крепления электромоторов выполнены так же их листовой стали толщиной 1 мм.
Окраска деталей порошковая.
Перфорация несущей и дополнительных пластин выполнена с учетом установки на них деталей конструктора с диаметром отверстий 3,5 мм. Свободное от штатных отверстий пространство пластин перфорировано отверстиями 4,2 мм с шагом 10 мм. Размещение отверстий 4,2 мм дает возможность применять в качестве дополнительных строительных компонентов применять детали широко распространенных обычных металлических конструкторов.
Электромоторы сопряжены в одном корпусе с понижающим редуктором. Передаточное отношение редуктора 1:48. Количество оборотов на выходном валу редуктора без нагрузки 230 об/мин.
Блок управления.
Блок управления ЛАРТ R-5 - модуль состоящий из микроконтроллера Arduino Nano, драйвера моторов на микросхеме 74HC00D и двух L293D, стабилизатора питания L7805 и расширителя портов.
Новая модификация блока управления R-5M снабжена DC-DC преобразователем и обеспечивает наиболее эффективное использование батареек. Робот сохраняет работоспособность при напраяжении батареи 4-5 Вольт.
Комплект модулей и датчиков.
Датчики и модули конструктора предназначены для конструирования робота под конкретные задачи. Датчик препятствий помогают роботу обнаруживать препятствия и успешно их обходить. Датчик звука - для реагирования робота на различные звуковые эффекты. Энкодеры для исчисления пройденного расстояния.
Макетный модуль.
Перед тем, как приступить к сборке и программированию роботов из конструктора можно собрать макетный модуль и потренироваться в программировании простых устройств. В комплекте есть светодиоды, резисторы и другие электронные компоненты для различных экспериментов
Набор деталей для сбоки робота с инфракрасным датчиком препятствий."Глазами" робота в этом конструкторе является ультразвуковой датчик. "Мозгом" робота - контроллер Ардуино. ЛАРТ — довольно сложные, но надёжные, конструкторы отечественного производства, предназначенные для продвинутого пользователя.
Механическая часть
Механическая часть робота-конструктора построена на базе 4-х моторного шасси и включает в себя несущую пластину длиной 170 мм и шириной 120 мм. 4 электромотора с редуктором и пластмассовыми колесами. На колеса одеты полиуретановые шины. Так же в комплект входит сервопривод.
Электронная часть
Электронная часть состоит из драйвера электромоторов, Ультразвукового приемо - передатчика иконтроллера Arduino UNO R3. Конструктор может комплектоваться аналогичными и совместимыми с Arduino UNO R3 контроллерами.
Сборка конструктора
Для установки драйвера электромоторов, контроллера, сервопривода на несущей пластине предусмотрены отверстия. На контактах разъема POWER и разъема ICSP можно найти контакты для подключения питания УЗ датчика и сервомотора.
Подключение драйвера электромотора
BAT – клемма для подключения батареи питания. Напряжение питания Драйвера 3-9В;
Vin – параллельный BAT разъем. Предназначен для подключения питания батареи
на другие электронные модули.
Motor1-right – разъем для подключения переднего правого электромотора
Motor2-right - разъем для подключения заднего правого электромотора
Motor1-left - разъем для подключения переднего левого электромотора
Motor2-left - разъем для подключения заднего левого электромотора
In right – управление направлением вращения правых электромоторов
PWM-right – управление скоростью вращения правых электромоторов
In left – управление направлением вращения левых электромоторов
PWM-left – управление скоростью вращения левых электромоторов
![Драйвер электромотора]()
Ультразвуковой датчик

В качестве сенсора для определения препятствий используется Ультразвуковой датчик. УЗ датчик позволяет не только обнаруживать препятствие, но и с точностью до 3-х мм определить расстояние по помехи. УЗ датчик устанавливается на поворотное устройство (сервомотор). Что дает возможность находить свободный путь для продолжения движения с широким углом обзора. Задача программиста заключается в разработке алгоритма управления двигателями робота на основе информации, получаемой от УЗ датчика.
Ультразвуковой Модуль HC-SR04
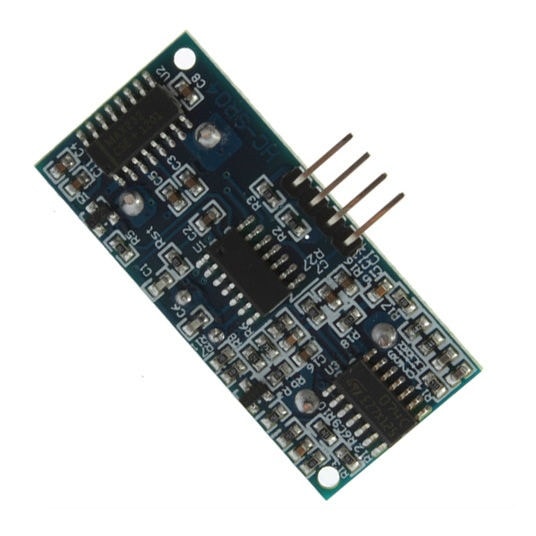

Модуль предназначен для определения расстояния до объекта бесконтактным способом. Эффективное расстояние составляет 2cm-400cm, Точность измерения расстояния в диапазоне от 2-х см до 400 см составляет 3 мм.
Эффективный угол +-15 градусов.
Рабочее напряжение: 5V (DC)
Максимальный ток: Не более 2mA.
Модуль состоит из ультразвукового передатчика, приемника и схемы управления.
Принцип работы:
Для запуска датчика необходимо на вход trig подать с контроллера импульс длительностью 10 микросекунд. Этот импульс запускает ультразвуковой генератор, который излучает 8 посылок, частотой 40 кГц. Отраженный от объекта сигнал принимается приемником и преобразуется в электрический сигнал ТТЛ уровня, который появляется на контакте echo. Длительность этого сигнала пропорциональна расстоянию до объекта. Расстояние до объекта рассчитывается по формуле: S(sm)=Techo/58 . (Расстояние до объекта равно частному от деления длительности импульса Эхо в микросекундах на делитель 58).
Читайте также: