
Коробка передач из лего ev3
Обновлено: 24.04.2024
Информация о внутреннем устройстве портов и кабелей будет полезна при конструировании собственных датчиков, расширителей портов или подключении каких-либо других самодельных устройств. Далее в этой главе будет рассмотрено назначение каждой линии входных и выходных портов, а также передаваемых по ним сигналов. Назначение каждого провода кабеля зависит от того, подключен кабель к входному или выходному порту. При подключении датчиков назначение проводов также зависит от типа подключаемого датчика.
Представленная здесь информация справедлива, в первую очередь, для набора Mindstorms NXT. Для набора EV3 могут быть отличия (назначение сигналов кабелей такое же, а вот возможности драйверов двигателей могут отличаться). Для более детального изучения советую почитать NXT Hardware Developer Kit и EV3 Hardware Developer Kit. Это официальное описание аппаратной части (схемы контроллера, датчиков, моторов и т.д.) конструкторов Mindstorms от компании LEGO.
 |  |
| Внешний вид портов датчиков | Внешний вид портов моторов |
| Плата контроллера, вид с двух сторон | |
| Плата Bluetooth-модуля крупным планом |
При внимательном рассмотрении прозрачных разъёмов стандартных соединительных кабелей из комплекта, можно увидеть 6 проводов различных цветов: белый, черный, красный, зелёный, желтый и синий. Разъёмы портов контролера NXT и стандартных кабелей визуально напоминают стандартные телефонные разъёмы типа RJ-12 (на самом деле под обозначением RJ-12 имеются в виду разъёмы типа RJ-25 или 6p6c). Однако при внимательном рассмотрении можно заметить, что замок разъёмов соединительных кабелей из набора «LEGO MINDSTORMS» смещен вправо (если держать разъём замком к себе), а у разъёма типа RJ-12 замок находится ровно посередине. Таким образом, компания «LEGO» принуждает пользователей к использованию оригинальных кабелей во избежание поломок контроллера или других элементов конструктора. В интернете можно найти подробные инструкции по изготовлению разъёмов аналогичных разъёмам оригинальных кабелей из набора, либо сразу купить готовые разъёмы.

Порты датчиков: назначение контактов и описание сигналов
Ниже в таблице указаны номер контакта, цвет и назначение каждого провода при подключении кабеля к входному порту.
Контакт 1 – Белый провод – AN – может использоваться для двух целей: как аналоговый вход или как выход питания 9 В. Контроллер подает напряжение питания на этот контакт в течение 3-х миллисекунд, а затем считывает аналоговое значение в течение 0,1 мс. В режиме аналогового входа данный контакт подключается к аналого-цифровому преобразователю (АЦП). Для исключения повреждения АЦП входной сигнал должен находиться в пределах от 0 до 5 В. АЦП преобразует входной сигнал в цифровое значение от 0 до 1023. Согласно документации частота дискретизации составляет 333 Гц (у EV3 частота уже 1 кГц). На время считывания сигнала контакт «подтягивается» к линии 5 В через резистор номиналом 10 кОм находящийся внутри блока. Наличие данного резистора значительно упрощает схемотехнику большинства датчиков.
При использовании первого контакта в качестве 9-вольтового источника питания для датчиков, необходимо учитывать, что напряжение питания на этом контакте будет равно напряжению источника питания контроллера NXT. Поэтому при использовании никель-металлогидридных (NiMH) аккумуляторов с этого контакта можно получить напряжение около 7,2 В или меньше. Это напряжение используется для питания стандартных и самодельных датчиков, которым недостаточно 5 вольт, в частности, ультразвуковой датчик NXT использует его для увеличения мощности своего передатчика. Все датчики RCX, подключаемые через адаптер (переходник), используют для своей работы именно эту линию.
Поскольку питание на этот контакт подаётся с перерывами, датчику обычно требуется конденсатор, чтобы поддерживать напряжение питания на время чтения данных. Ограничение по току нагрузки на этом контакте составляет примерно 14 мА на каждый порт. Если ток нагрузки превышает это значение, напряжение значительно падает, что может привести к некорректной работе датчика.
Контакты 2 и 3 – Чёрный и красный провода – GND – общая земля. Эти два контакта соединены вместе внутри блока NXT и внутри стандартных сенсоров LEGO. Все сигналы измеряются и формируются относительно этих общих контактов.
Контакт 4 – Зелёный провод – Питание 4.3 В – основная линия питания для стандартных датчиков NXT. Новые цифровые микросхемы, рассчитанные на 5-вольтовую логику, вполне могут быть запитаны от него, но бывают случаи, когда этого напряжения оказывается недостаточно для стабильной работы. В отличие от 9-вольтовой линии питания, этот выход обеспечивает суммарный ток 180 мА для всех входных и выходных портов. Каждый порт может использовать в среднем 25 мА (180 / 7 = 28,71 мА), но вполне допустимо увеличить потребление одного или нескольких портов, если остальные порты потребляют меньше или не задействованы. Стандартные датчики из набора, а также датчики оборотов сервомоторов потребляют в среднем около 20 мА.
Контакты 5 и 6 – Жёлтый и синий провода – DIGAI0 и DIGAI1 – данные линии используются для передачи данных. Контакты используют цифровые сигналы уровня 3,3 В и непосредственно подключены к микропроцессору контроллера NXT. В основном они используются для связи по протоколу I2C (DIGAI0 как SCL и DIGAI1 как SDA), но также могут использоваться как обычные сигнальные линии. При использовании линий как входов контроллер NXT ограничивает ток для защиты линий микропроцессора от повреждений. Защита реализована через последовательно включенные ограничительные резисторы номиналом 4,7 кОм. В режиме выхода уровень напряжения на контактах не должен превышать 3,3 В. При работе с данными контактами необходимо соблюдать осторожность, поскольку ошибка может привести к повреждению линий микропроцессора внутри контроллера NXT.
Помимо протокола I2C, контакт DIG0 используется датчиком освещённости для переключения состояния встроенного светодиода подсветки (включен или выключен) и датчиком звука для переключения между режимами DB (абсолютная громкость звука) и DBA (уровень звука, приравненный к чувствительности человеческого уха).
Порты моторов: назначение контактов и описание сигналов
Ниже в таблице указаны номер контакта, цвет и назначение каждого провода при подключении кабеля к выходному порту.
Контакты 1 и 2 – Белый и чёрный провода – MA1 и MA2 – линии питания сервомотора. Максимальное напряжение равно напряжению источника питания контроллера. Для управления питанием двигателей робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такие устройства называют драйверами двигателей, они изготавливаются в виде микросхем разной мощности.
Схемотехнически драйвер, управляющий питанием двигателей, представляет собой H-мост – это электронная схема, которая позволяющая приложить напряжение к нагрузке в разных направлениях. Термин Н-мост появился благодаря графическому изображению этой схемы, напоминающей букву Н.
Н-мост собирается из 4 транзисторов (реле, переключателей). В зависимости от управляющих сигналов открывается та или иная пара транзисторов, при этом два других транзистора закрыты. На рисунке ниже показана электрическая схема H-моста, а также указано направление вращения двигателя для двух различных состояний управляющих сигналов. Схема имеет два управляющих входа, обозначенных буквами A и B. Исходя из того, что H-мост управляется цифровыми сигналами (ноль или единица), возможны 4 состояния входных сигналов.

При значениях A = 1 и B = 0 (левая схема на рисунке выше) транзисторы VT1 и VT3 открываются, по двигателю начинает протекать ток, что приводит к вращению двигателя вперёд (forward). Если поменять значения входных сигналов на противоположные и подать на схему значения A = 0 и B = 1 (правая схема на рисунке выше)), то это приведет к закрытию транзисторов VT1, VT3 и открытию транзисторов VT2, VT4. Направления протекания электрического тока поменяется, следовательно, изменится и направление вращения двигателя – он станет вращаться в обратном (reverse) направлении.
Также Н-мост позволяет электрически тормозить двигатель, накоротко замыкая его выводы (brake). Для этого необходимо подать сигнал высокого уровня на оба входа (A = 1 и B = 1). А если на оба входа подать сигнал низкого уровня (A = 0 и B = 0), то двигатель можно будет свободно вращать (coasting), как и при отключенном питании.
При использовании H-моста с двигателями постоянного тока в схему включают защитные (ограничительные) диоды (VD-VD4 на рисунке выше). Необходимость в диодах вызвана наличием токов при остановке двигателя, вследствие уменьшения электромагнитного поля внутри его обмоток.
В контроллере NXT используются две различных микросхемы H-моста. Для управления портом A задействована микросхема одноканального H-моста LB1930M, а порты B и C управляются микросхемой двухканального H-моста LB1836M. Допустимый выходной ток составляет примерно 800 мА для порта A и 500 мА для портов B и C. Пиковый ток может достигать тока в 1 А. Микросхемы имеет тепловую защиту, которая ограничивает ток при перегрузках или перегреве. Поскольку порт A допускает больший выходной ток, по сравнению с портами B и C, то зачастую он используется для управления манипулятором робота, а порты B и C – для управления движением робота.
В таблице ниже приведены уровни напряжений на выходе драйверов двигателей контроллера NXT для различных состояний входных сигналов, для входных сигналов за единицу принят сигнал высокого уровня, за ноль – низкого.
Проанализировав представленную таблицу можно сделать следующий вывод об особенности порта A: если к двигателю приложено напряжение и при этом двигатель в режиме торможения, то на линиях 1 и 2 будет сохраняться высокий уровень напряжения (9 В или 7,2 В в зависимости от типа источника питания).
Зависимость между скоростью вращения мотора и приложенным напряжением линейна. Поэтому для регулирования скорости вращения двигателя используется способ широтно-импульсной модуляции (PWM – pulse width modulation). Идея данного способа заключается в получении изменяющегося аналогового значения напряжения посредством особого алгоритма управления транзисторными ключами. ШИМ-сигнал моделирует напряжение между максимальным и минимальным значениями напряжения. Частота импульсов при этом остается постоянной, изменяется только коэффициент заполнения D – величина, отражающая процентное соотношение длительности времени включения максимального напряжения τ к длительности периода сигнала T. На рисунке ниже показаны графики ШИМ-сигнала для различных коэффициентов заполнения.

При использовании широтно-импульсной модуляции среднее напряжение на двигателе будет определяться отношением между временем, в течение которого ключ будет открыт и закрыт. Таким образом, управляя шириной импульса можно управлять напряжением, приложенным к двигателю, что в свою очередь позволяет регулировать его скорость вращения. Помимо двигателей, таким же способом можно управлять яркостью свечения светодиодов.
Длительность периода ШИМ для стандартной прошивки составляет 128 нс, что соответствует частоте 7,8 кГц, которая находится в слышимом диапазоне. Поэтому иногда можно услышать писк, исходящий от мотора. Это происходит, когда к двигателю приложено напряжение, а его вал не может провернуться. Например, если манипулятор робота достиг крайнего положения, а питание все еще подается.
Контакт 3 – Красный провод – GND – общий «земляной» контакт. Контакты 2 и 3 соединены между собой в датчиках, но не в моторах. Если датчик будет случайно подключен к порту мотора, питание мотора будет закорочено на землю. К счастью, в блоке есть защита на этот случай, но лучше лишний раз не ошибаться.
Контакт 4 – Зелёный провод – Питание 4.3 В – данный контакт подключен к линии питания 4,3 В, общей для всех портов блока. Питание с этого контакта используется тахометром сервомотора.
Контакты 5 и 6 – Жёлтый и синий провода – DIGAI0 и DIGAI1 – данные линии используются для получения сигналов от встроенного в сервомотор NXT оптического тахометра. Датчик оборотов генерирует прямоугольные импульсы, которые позволяют контроллеру NXT определить скорость и направление вращения мотора. Два импульса сдвинуты относительно друг друга на четверть периода сигнала. На рисунках ниже показаны графики сигналов, генерируемых датчиком оборотов при вращении мотора вперёд и назад соответственно. Частота импульсов зависит от скорости вращения мотора. Один полупериод сигнала соответствует одному градусу поворота мотора.
| Импульсы при вращении мотора вперёд | Импульсы при вращении мотора назад |
 |  |
Схема подключения датчиков
 |  |
 |  |
 |
Подключение своих устройств по I2C
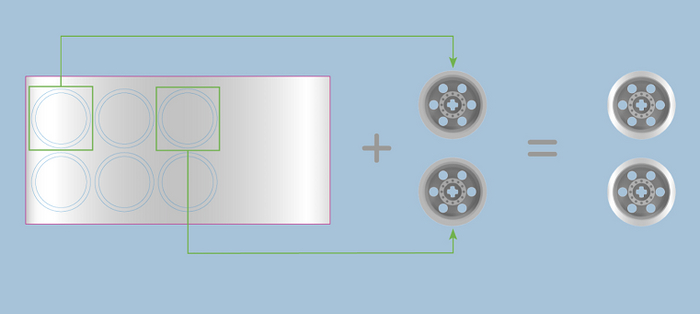
К контроллеру NXT можно подключить различные устройства, работающие по протоколу I2C. Данная опция позволяет расширить функциональные возможности конструктора. Одним из простых примеров, описанных в книге Extreme NXT, является подключение I2C расширителя портов PCF8574 (документация). Данная микросхема имеет 8 линий и позволяет как вводить, так и выводить данные. То есть можно подключить к одному из портов плату с PCF8574, а к ней светодиоды или кнопки, общим количеством до 8 штук. Ниже показан пример подключения платы со светодиодами.

Для экспериментов были спроектированы два типа плат : первая только со светодиодами, вторая включала и кнопки. Ниже представлены схемы и внешний вид плат. Платы проектировались в САПР Diptrace.
Ниже показана уже готовая для экспериментов плата. Для подключения платы необходимо разрезать один кабель, напаять на каждый провод ответную часть (BLS) штыревого контакта (PLS) и натянуть термоусадку. Получается довольно удобно. Термоусадку лучше брать по цвету провода. Разрезать лучше самые длинные кабели. По опыту использования они реже пригождаются. Из одного кабеля можно изготовить два новых кабеля для экспериментов.
 |  |
| Внешний вид платы и переделанного кабеля NXT | Плата с PCF8574 крупным планом |
Программная часть писалась в RobotC. Описание функций для работы с I2C из RobotC приведено в вики на сайте разработчика. Также советую почитать материалы от Storming Robots (раз и два). Ниже представлены два примера программ.
Первая программа реализует поочередное мигание светодиодов. Сначала загораются светодиоды одного цвета (нечётные по порядку), а затем другого цвета (чётные по порядку).
При старте программы указывается тип датчика, подключённого к порту (значение sensorI2CCustom указывает, что используется I2C), размер массива передаваемых данных и адрес устройства. В нашем случае адрес равен 0x40. Общий вид адреса в двоичном виде 0b0100-A2-A1-A0-0, линии А0, А1 и А2 (пины 1, 2 и 3 микросхемы) определяют значение соответствующих битов адреса. На приведённой выше схеме все три линии подтянуты к земле (нулю), поэтому адрес равен 0b01000000 = 0x40. Одновременно можно подключить до 8 устройств.
После инициализации порта запускается бесконечный цикл передачи данных. Для начала данные добавляются в массив (полезные данные, которые необходимо переслать) и с помощью функции sendI2CMsg выполняется отправка массива. Для отправки надо указать порт, адрес массива в памяти (указатель на массив) и размер передаваемых данных (в байтах, в нашем случае это 1 байт). Далее ожидается завершение передачи и вызывается задержка на 500 мс для того, чтобы мигание светодиодов было наглядно видно. Передаваемый байт данных каждый раз инвертируется, чтобы светодиоды зажигались поочерёдно. Важно помнить, что светодиоды зажигаются низким логическим уровнем на линии.
Вторая программа реализует постоянный опрос кнопок на плате. На экран выводится значение, прочитанное из PCF8574.
Определить номер нажатой кнопки можно с помощью битовых операций. При использовании описанной платы выводится следующее:
- 243 – нет нажатых кнопок
- 247 – нажата только первая кнопка (SB1, подключена к 6-ому выводу PCF8574)
- 251 – нажата только вторая кнопка (SB2, подключена к 7-ому выводу PCF8574)
- 255 – нажаты обе кнопки
Таким образом, на базе миксросхемы PCF8574 можно собрать простой расширитель портов, способный работать как на вывод, так и на ввод данных. Например, можно к контроллеру подключить Arduino и передавать данные размером более 1 байта (показания датчиков, различные команды и так далее).
Кроме описанной микросхемы PCF8574, можно использовать и другие микросхемы с интерфейсом I2C. Например, PCF8591 – универсальный аналогово-цифровой и цифро-аналоговый преобразователь (документация). Микросхема PCF8591 обладает следующими возможностями:
Как оказалось, шустрые китайцы уже давно выпускают модуль для Arduino на данной микросхеме. Модуль скорее предназначен для обучения или экспериментов, а не для конкретных устройств. К аналоговым входам PCF8591 подключены фоторезистор, терморезистор и переменный резистор, а на выход ЦАП подключен светодиод. Внешний вид и схема модуля показаны ниже.
Соберите Машину с передачей, чтобы изучить влияние различных зубчатых передач.
План урока
1. Подготовка
- Ознакомьтесь с материалами для учащихся в приложении Education EV3 Classroom.
- Соберите информацию о шестернях, которая поможет ученикам разобраться в таких понятиях, как повышающая и понижающая передача.
- Используйте идеи, приведённые в разделе Начало обсуждения, чтобы вовлечь учеников в дискуссию по теме занятия.
- Разделите класс на пары.
3. Исследование (20 мин.)
- Каждая пара учеников должна собрать Машину с передачей.
- Дайте им время, чтобы испытать модель и убедиться, что она построена правильно и работает должным образом.
4. Объяснение (10 мин.)
- Каждая команда должна провести эксперимент по крайней мере трижды для каждой из предложенных зубчатых передач и записать результаты.
- Убедитесь, что учащиеся могут подготовить собственные таблицы результатов испытаний.
5. Дополнение (10 мин.)
- Учащиеся должны проанализировать, как передаточное отношение связано с пройденным расстоянием и скоростью машины.
- Попросите каждую команду кратко подвести итоги своих экспериментов.
- Не забудьте оставить время для уборки.
6. Оценка
- Дайте оценку работе каждого учащегося.
- Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Ехать на велосипеде в гору или против ветра непросто. Переключение передач помогает регулировать мощность, необходимую для движения. При езде по горизонтальной поверхности вы начинаете движение на низкой передаче и переключаетесь на более высокую передачу на большей скорости.

Начните обсуждение процесса переключения передач, задавая соответствующие вопросы, например следующие.
- Что означают термины коробка переключения передач и редуктор?
- Почему зубчатые механизмы часто упаковывают в футляр?
- Какова связь между передаточным отношением и пройденным расстоянием?
- В каких ситуациях нужна понижающая передача? А в каких нет?
Советы по сборке
Инструкция по сборке
Проверка в действии
Поместите машину на расстоянии не менее 10 см от стены. Ультразвуковой датчик должен быть расположен перпендикулярно стене. Запустите программу и подождите, пока на экране не отобразится значок EV3. Для запуска программы нажмите Центральную кнопку на модуле EV3. Начальное расстояние до стены измеряется Ультразвуковым датчиком, также сбрасывается таймер. Машина отъезжает от стены за счёт включения Большого мотора на один оборот. Теперь необходимо снова измерить расстояние до стены и время движения для расчёта пройденного расстояния, скорости машины и скорости вращения. Рассчитанные значения отображаются на экране до следующего нажатия на Центральную кнопку для подготовки к очередному тестовому запуску.
Использование Ультразвукового датчика
Ультразвуковой датчик генерирует звуковые импульсы, которые образуют звуковой конус. Объекты, находящиеся в этом конусе, можно обнаружить по отражению звуковых волн. Начиная эксперимент, не становитесь рядом с машиной или в зоне чувствительности Ультразвукового датчика; лучшее место для инженера — позади Ультразвукового датчика.
Проведение эксперимента
При проведении эксперимента напомните ученикам следующее.
-
Пройденное расстояние (в см), скорость (в м/с) и скорость вращения (в оборотах в секунду) будут отображены на экране.
Необходимо записывать в таблицу результатов испытания номер эксперимента; передаточное отношение; свои прогнозы относительно того, что произойдёт; пройденное расстояние и скорость. Убедитесь, что вы оставили достаточно места для записи других наблюдений.
1. Модели без мотора: механизмы и механические передачи из Lego EV3
Здесь собраны модели, в которых изучается работа механизмов и механических передач.

2. Модели с мотором: программируем сервомоторы и запускаем механизмы
Здесь собраны модели, в которых нужно программировать сервомоторы и собирать сложные механизмы.
3. Модели с датчиками: изучаем работу сенсоров и пишем программы на визуальном языке
Здесь изучаем работу датчиков и программируем модели на внешние реакции.
4. Шагающие роботы
Здесь изучаем работу шагающих механизмов из Lego EV3 и собираем модели, которые перемещаются с помощью конечностей.
5. Игры и соревнования
Здесь собраны модели и регламенты к играм и соревнованиям для Lego Education EV3.
6. Захваты
Здесь собраны разные варианты конструкций захватов для набора Lego EV3.
7. Манипуляторы
Здесь найдете инструкции к моделям для манипуляций с различными предметами.
Собираем модели роботележек с различной компоновкой микрокомпьютера и с разными вариантами крепления датчиков и захватов.
2. Модели без мотора: изучаем механизмы и механические передачи
Простые модели для изучения механизмов и механических передач.
3. Шагающие роботы
Простые модели для изучения темы «Шагающие механизмы».
4. Игры и соревнования
Модели и регламенты игр для проведения занятия в игровой форме.
5. Захваты
Здесь собраны варианты конструкций захватов для проведения занятий с перемещением объектов.
6. Манипуляторы
Здесь собраны модели манипуляторов для изменения положения объектов на поле и сборки башни.
7. Плакаты по робототехнике
Здесь найдете файлы для самостоятельной печати плакатов по робототехнике. Картинки представлены в хорошем разрешении.

Всегда было интересно, реально ли сделать полностью идентичную модель автомобиля в масштабе 1:5 например? То есть, самому сделать двигатель, выточить поршни, трансмиссию, все узлы подвески, и вообще все всё, и потом запустить её
Коробки-автомат есть даже в лего уже. А наши автомобили ка ездили на ручной коробке, так и будут дальше ездить

Тяжелый экскаватор Lego 42121 модель Б
Тяжелые времена настали для поклонников лего в России. Поэтому сегодня мой пост будет посвящен не новинке, а альтернативной модели на которую я уже делал обзор. Ссылка на обзор ниже.
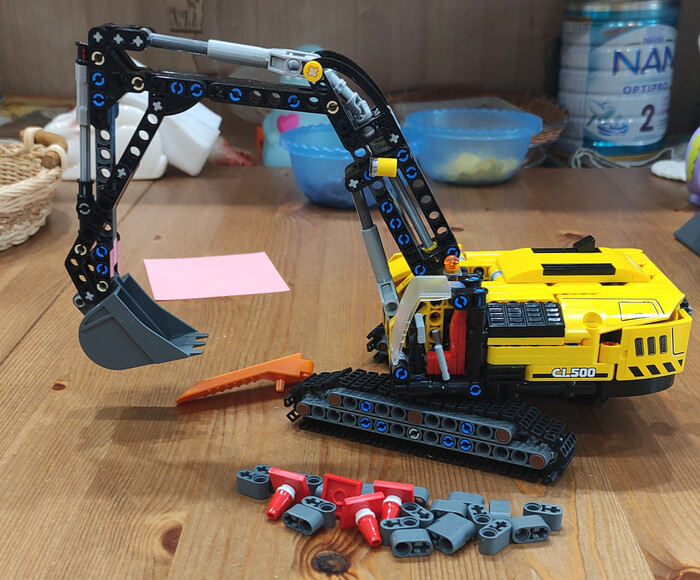
Что в итоге должно получится.

Разбираем на запчасти. В ход пойдут даже детали балок на 2, которые внизу кадра.

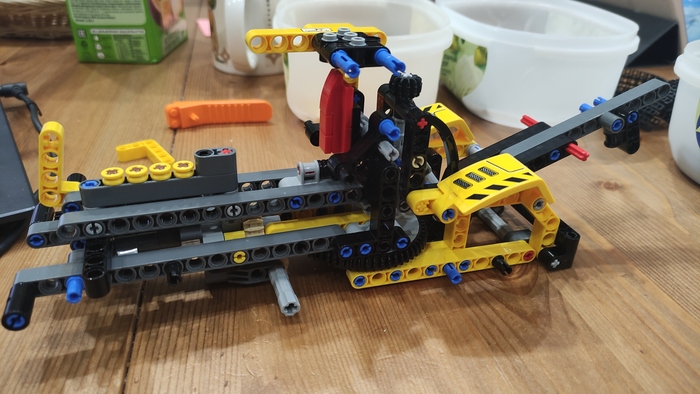
Так как это альтернативная модель, то этапов сборки не будет. Привожу несколько фотографий процесса.


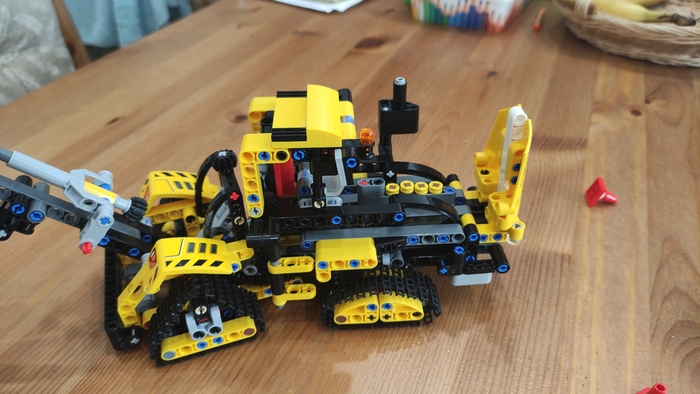
Вот что в итоге получилось. Экскаватор теперь больше похож на трактор на четырех гусеницах. Задняя часть может поворачиваться. Есть подобие мотора. Из конусов осталось только два, маленькие балки на 2 были задействованы в модели.

Деталей после сборки осталось не много.

Что имеем в итоге. Модель не дурна и задействует почти все детали из основного набора. Появился макет двигателя. Но при этом в конструкции ощущается, что модель сделана по остаточному принципу. Некоторые детали крепятся свободно и могут легко перемещаться, от сиденья в кабине осталась лиши спинка. Участь данной сборки уже предрешена - ребёнок поиграет несколько дней и соберу назад.
Xiaomi Mitu Transformers Optimus Prime QTZ011QI
В начале года появилась неожиданная новость, что Lego в коллаборации в Hasbro (по факту конкурентом) выпустит сборную модель Оптимуса Прайма в серии Creator Expert. Я начал гуглить хоть какие-нить изображения будущего набора, и обнаружил что уже существуют лицензионные lego-like трансформеры от Xiaomi. Правда официально лицензия распространяется только на рынок Китая и, как и другие наборы от Xiaomi, эти конструкторы выполнены в формате Technic. Причем по мимо собственно самого Оптимуса Прайма в это серии есть еще четыре трансформера – Бамблби, Мегатрон, Старскрим и Гримлок.
В прочем, в наших магазинах в наличии был только Оптимус Прайм, а так как новые официальные наборы Lego мы в России похоже увидим еще не скоро я решил посмотреть на модель от Xiaomi.
Коробка достаточно большая, сравнима с топовым наборами Lego, при этом никакого нездорового гигантизма присущего китайским наборам. Все свободное пространство забито деталями. Количество деталей – 1280 шт. Для сравнения – это уровень Lego Technic 42126 Ford F-150 Raptor, в котором всего на 100 деталей больше. При этом внутренняя компоновка больше походит на эксклюзивные наборы вроде Lego Technic 42115 Lamborghini Sian FKP 37. Плюс уже после сборки набора, я обнаружил, что внутренние отсеки коробки трансформируются (ха!) – их можно дополнительно разделить пополам для более удобной сортировки уже распакованных деталей. Определенно, в плане упаковки Lego есть чему учиться у Xiaomi.



Два больших лотка с помощью лепестков в стенке разделятся на два лотка по меньше.
В основном это обычные техник-детали. Качество самих деталей нареканий не вызывает, разве что некоторые коннекторы слишком тугие. Светлое серые и черные детали совпадают со цветами Lego, а вот красный не такой как в Lego, он ближе к томатному (в прочем у Lego такой цвет иногда встречается в виде различных коннекторов, но по факту это считается браком колеровки, так как официально это тот же красный цвет), а темно синий, насколько я знаю, и вовсе отсутствует в палитре Lego.
Слева деталь Lego, справа - Xiaomi. Это не разница в освещении, они действительно отличаются по цвету.
Есть несколько деталей, которые у Lego я ни разу не встречал, не уверен, что они вообще в Lego существуют. Шарниры, как вилки, так и розетки, сделаны из какого-то другого пластика, не из такого как остальные детали, и не такого из которого делает Lego. Он как будто прорезинен. Шарниры достаточно тугие, для вставки требуется усилие, сколько они продержатся – покажет время.
Также в наборе есть проприетарные детали. В первую очередь это конечно голова Оптимуса Прайма – это цельная неразборная деталь, которая крепится с помощью вилки большого шарнира. Есть пара панелей 3x7 цвета trans-blue (в Lego прозрачные панели на данный момент вообще не существуют, а жаль), а также пара обычных панелей 3x7 с выштамповкой (!) знака Автоботов. Честно говоря, я не ожидал, что Xiaomi настолько заморочатся, Lego бы просто сделали наклейки.

Кстати, о наклейках. В наборе они есть. В первую очередь это наклейки на серые детали, которые превращают их в серебристые (ну или в металлические). Клеить наклейки – это та еще задача. У Lego если наклейка клеится на всю деталь, то обычно сама наклейка чуть меньше по размерам чем деталь. Xiaomi вырезала наклейки четко по размерам – если не приклеить наклейку точно к краю, значит с другой стороны она будет выходить за пределы детали. И это с учетом того, что большинство деталей имеют форму отличную от прямоугольной, либо имеют различные закругления или выступы на плоскости. Кому и этого будет мало – есть задача со звездочкой – наклеить круглую наклейку с толщиной в пару миллиметров на круглый обод колеса той же толщины. Так же, уже после окончания сборки, часть наклеек предлагается наклеить сразу на несколько деталей, а часть наклеек вообще не встречается в инструкции. К цвету наклеек никаких претензий нет (камень в огород Lego, которые уже много лет не могут разобраться как печатать наклейки того же цвета, что и детали).
Кто там жаловался, что Lego делает круглые наклейки на круглые детали?
Несмотря на то, что детали расфасованы по примерно двадцати пакетам ни о каких этапах сборки речи не идет. Все пакеты нужно вскрывать сразу. Поэтому перед сборкой лучше заранее все рассортировать. Благо разные пакеты содержат разные детали, и даже парные (левая и правая) панели разложены по отдельным пакетам.
Бумажной инструкции в наборе нет, только QR-код со ссылкой на приложение, в котором можно эту инструкцию скачать.
Пару лет назад у меня уже был опыт сборки конструкторов от Xiaomi, и вот тогда для получения инструкции нужно было пройти целый квест. В тот момент у Xiaomi было два приложения – международное, в котором были инструкции на наборы, которые официально продавались в России, и китайское – в котором были инструкции на все наборы. Естественно, в нашем регионе скачать можно было только международное, в котором нужной мне инструкции не было. А китайское приложение надо было ставить на Android в виде скаченного со стороннего сайта apk. Если у вас было только устройство с iOS, то вы оставались без инструкции.
Поэтому я уже морально подготовился снова походить этот квест, но оказалось, что новое приложение доступно в российском App Store. Оно хоть и на китайском, но за счет картинок никаких проблем в использовании нет.
В прочем другой недостаток инструкций Xiaomi никуда не делся. Каждый шаг сборки занимает равно одну деталь, в редких случаях две. Поэтому количество шагов примерно равно количеству деталей. В данной инструкции их 1233. Естественно, каждый шаг занимает одну страницу, после чего ее нужно перелистнуть. Все это сильно замедляет сборку, по сравнению с наборами от Lego. Так что, если вы уже собирали Lego со схожим количеством деталей – можете смело умножать затраченное время на два. Зато все в 3D, и если вдруг что-то не понятно, то можно посмотреть с разных сторон. Опять же, в отдельных случаях есть дополнительные пояснения по правильному порядку сборки.

Позади примерно 5-6 часов сборки.
При самой сборке каких-то сложностей не возникло, разве что уже упомянутый момент с наклейками.
Собранная модель имеет подвижность во всех нужных местах – голова, плечи, локти, запястья, пояс, колени и голеностоп. За счет резиновых вставок на ступнях модель не скользит. Поэтому с устойчивостью никаких проблем нет. Но это все-таки больше полочная модель, чем игрушка.
Хоть это и трансформер – он ни во что не трансформируется. Для того, чтобы получился тягач – робота нужно разобрать и собрать грузовик уже по другой инструкции, которая так же есть в приложении.
Для оценки размера поставил рядом минифигурку.
Даже с учетом всех вышеописанных недостатков модель мне понравилась, думаю при возможности куплю и другие наборы из этой серии. Ну и будет интересно сравнить с моделью от Lego, там вроде как обещают возможность трансформации без пересборки.
Читайте также: