
Квадрокоптер из лего своими руками
Обновлено: 10.05.2024
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?
О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от ~120$.
В: Нужно ли паять?
О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?
О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.

Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику
1) Набор деталей с Aliexpress ~4000 руб.
1.1 Рама
1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А
1.3 Регуляторы Emax Simon K Series на 12A
1.4 Распределительная плата и провода питания
1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).
1.6 Соединительные провода от контроллера к передатчику
1.7 4 пропеллера (2 левых, 2 правых)
1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме
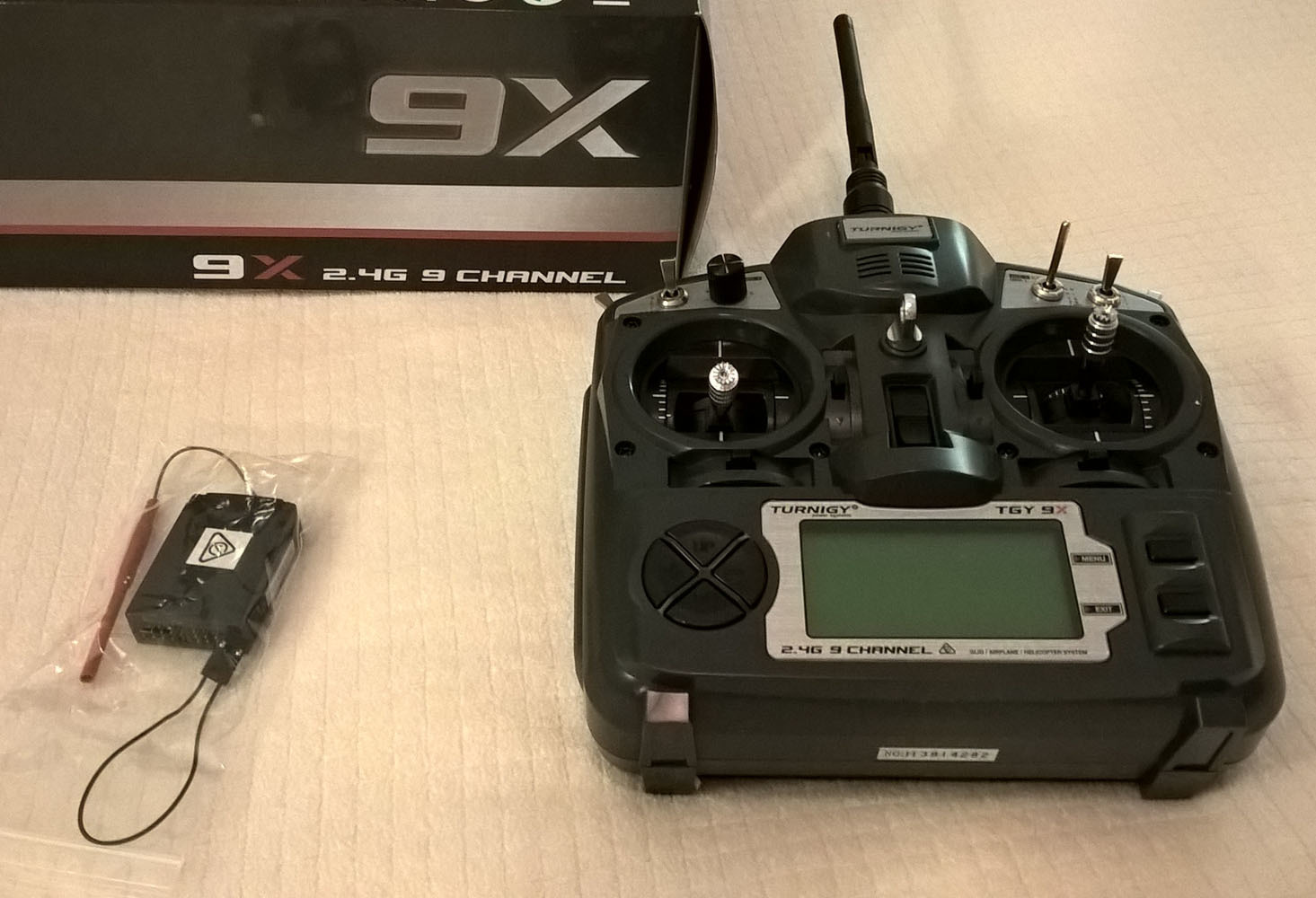
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?
О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?
О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
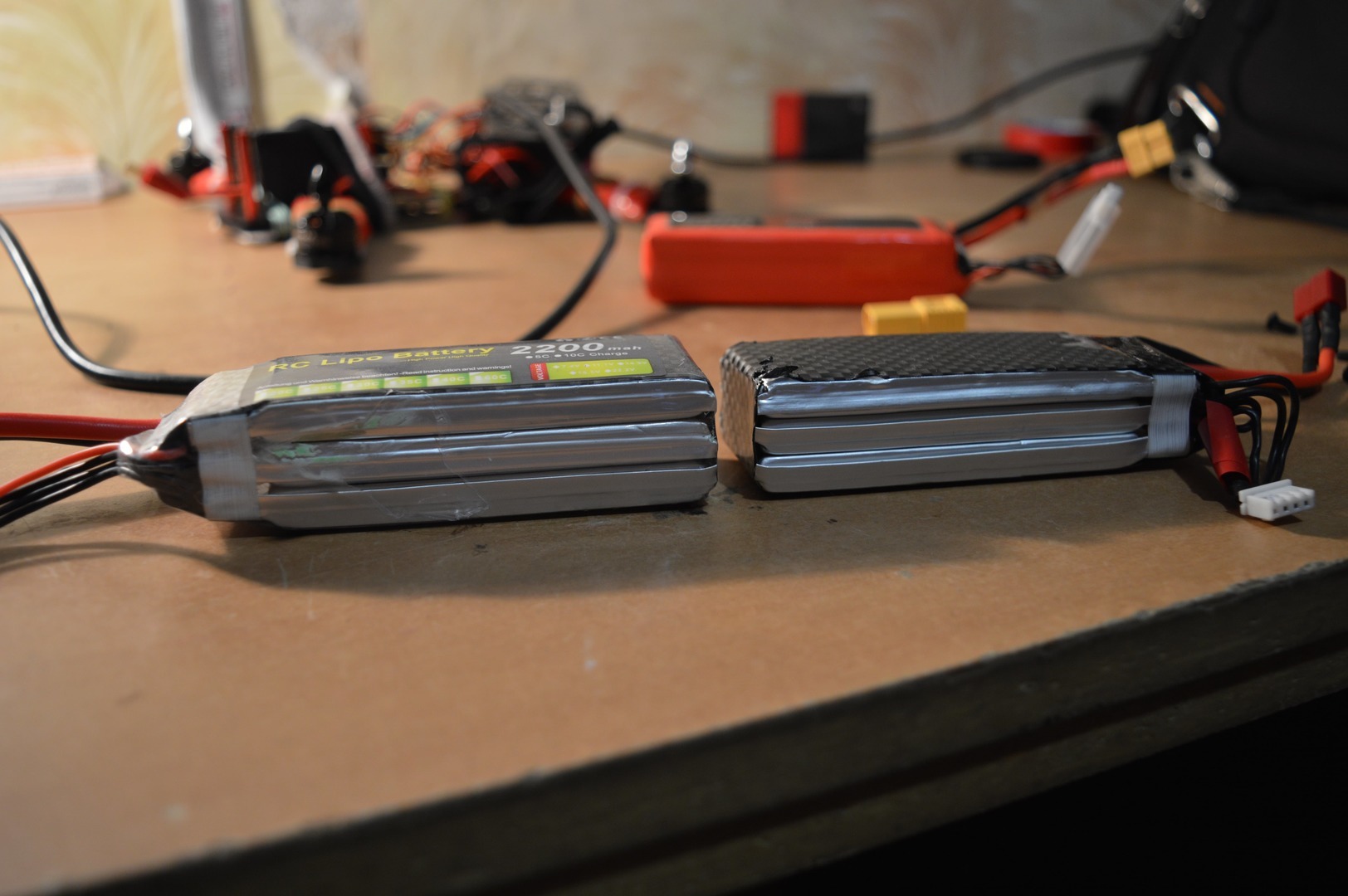
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.
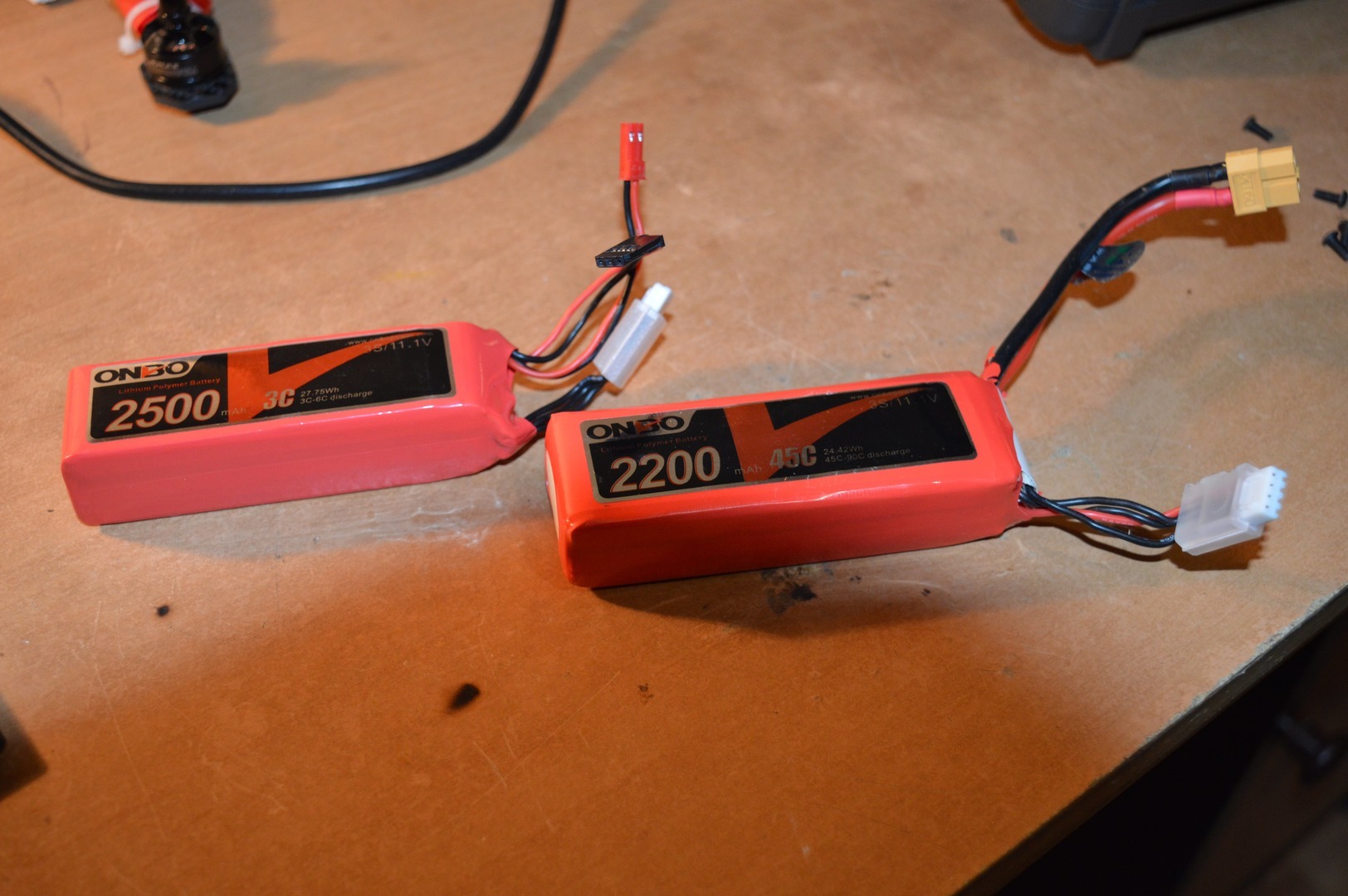
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?
О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.
В: Я же уже купил два. Нужен еще один?
О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6 ~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?
О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.
10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму
10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности
10.3 Термоусадка. Пригодится, когда будете прятать регуляторы
10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов
10.5 Двухсторонний скотч, изолента
10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия
10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
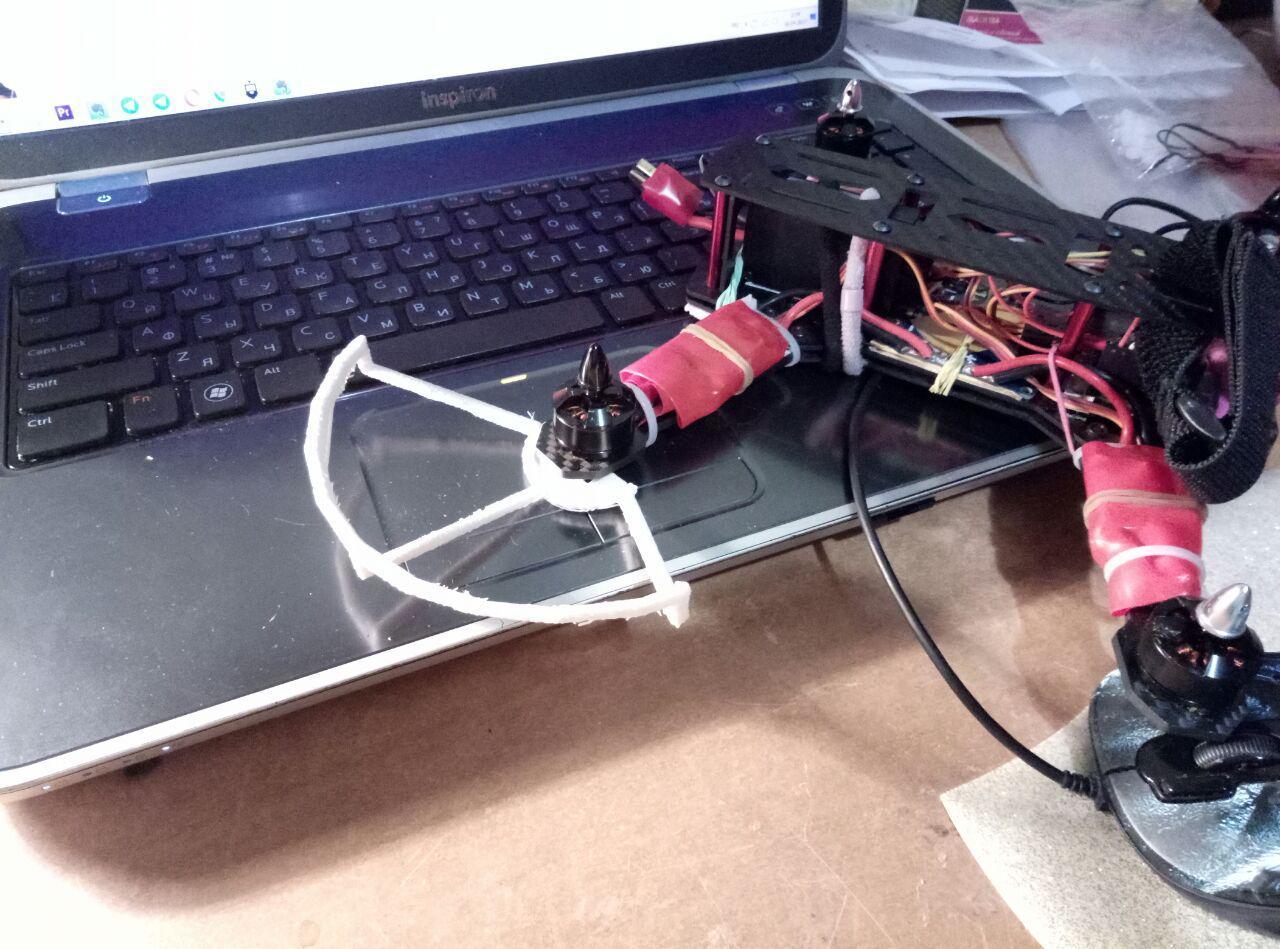
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей

Крепление двигателей
Пайка
Пайка распределительной платы
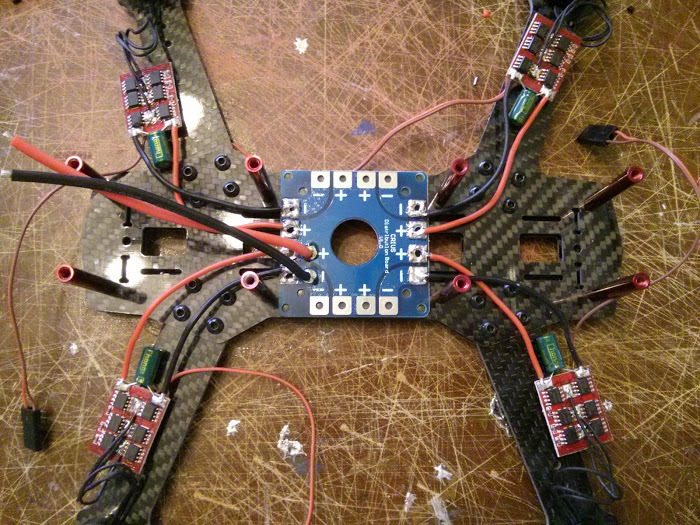
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
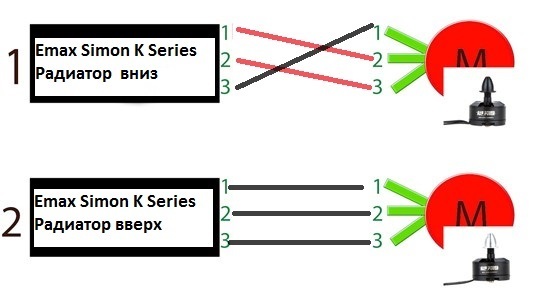
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.

Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
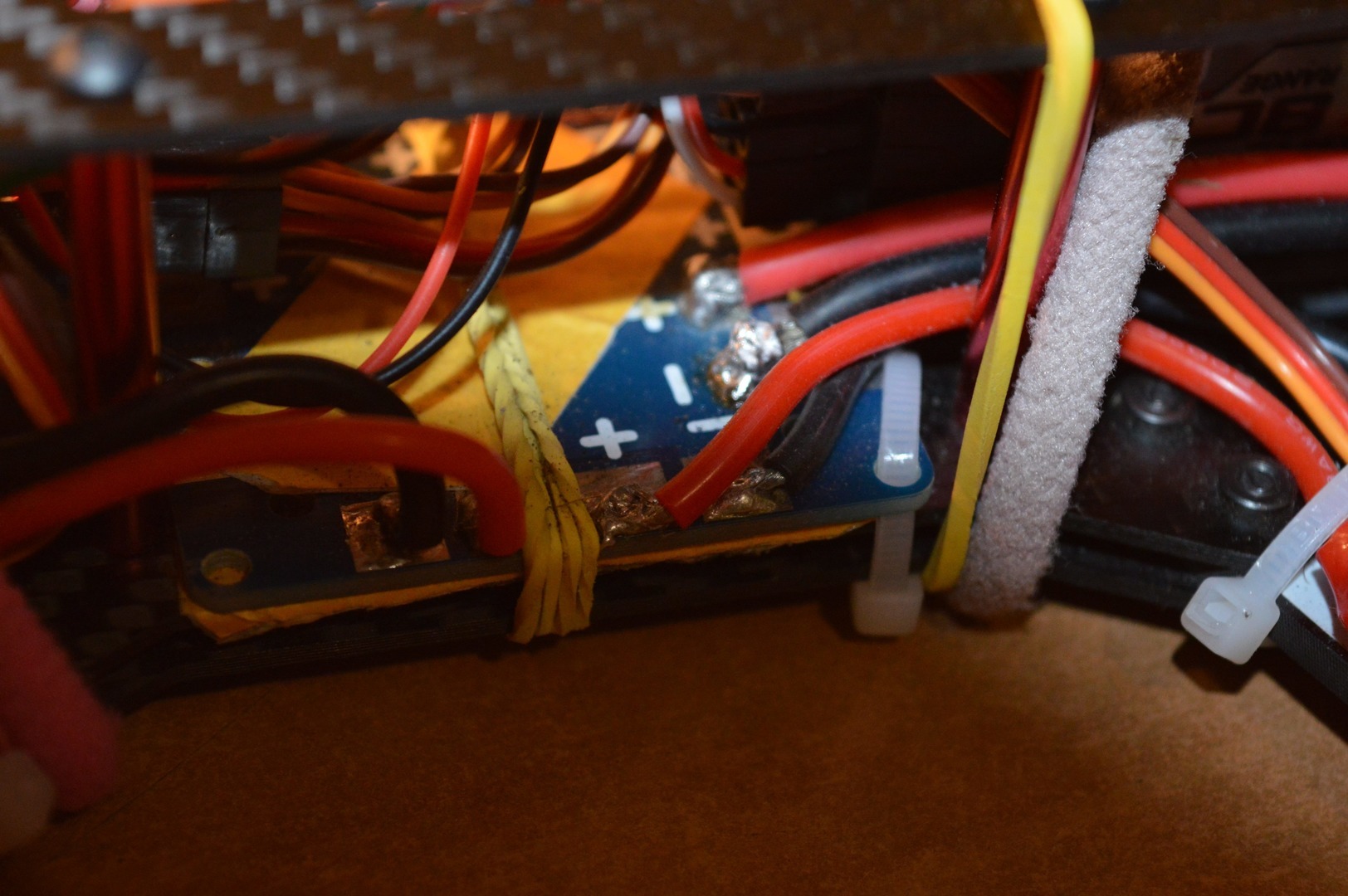
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.
Крепим плату. Два слоя двухстороннего скотча + хомут + резинка
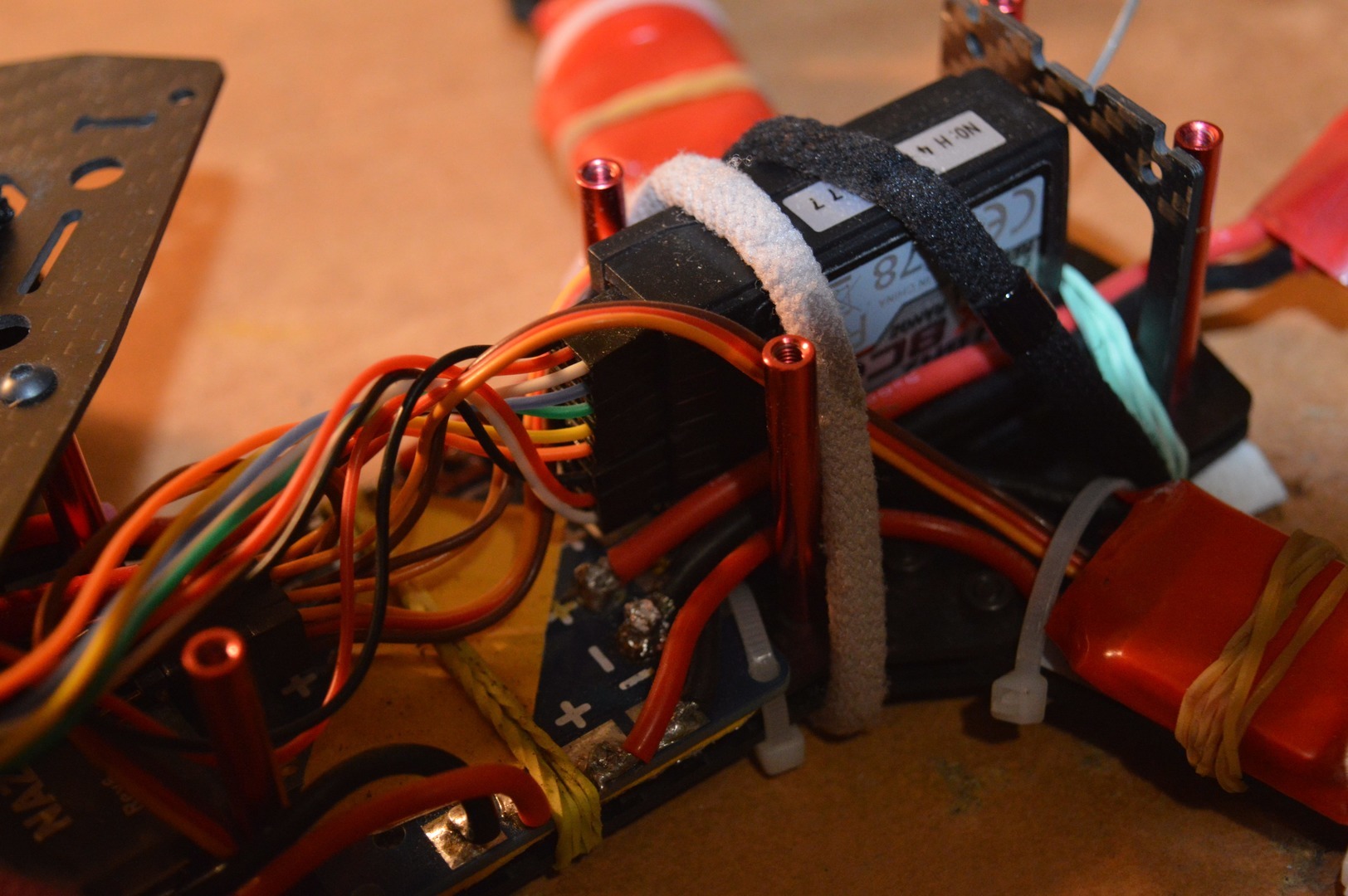
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил «крепление для камеры».
«Крепление для камеры»
Итого:


О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки

Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Обещанные ссылки на статьи
Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев.
Сделать квадрокоптер своими руками можно из чего угодно! Квадрокоптеры собирают из линеек, из коробки, из труб, даже из бумаги. А на этот раз - самодельный квадрокоптер был собран из лего конструктора!


Самое сложное в этой сборке - отобрать у ребенка конструктор вертолета Lego 60193 Arctic Air Transport, а сделать из нее действующую модель квадрокоптера уже не сложно! Основной задачей при изготовлении квадрокоптера, помимо летных качеств, было сохранить как можно больше оригинальных частей.
Видео полетов этого самодельного дрона вы можете посмотреть в конце статьи.
Итак, для изготовления такого квадрокоптера мастер использовал следующие
Инструменты и материалы
-Вертолет LEGO City Arctic - 60193 :
-Контроллер и ESC 20x20 мм, например, HGLRC XJB F428 Micro F4 AIO OSD:
-Бесколлекторные моторы RaceStar 1806 - 4 шт:
-Пропеллеры:Kingkong LDARC 5x4.5x3:
-Аккумулятор 2s 1000mah lipo:
-Разъемы;
-Провода;
-Радиомодуль (передатчик и приемник);
-Крепеж;
-Нож;
-Паяльник;
-Клеевой пистолет;
-Отвертка;
-Дрель;
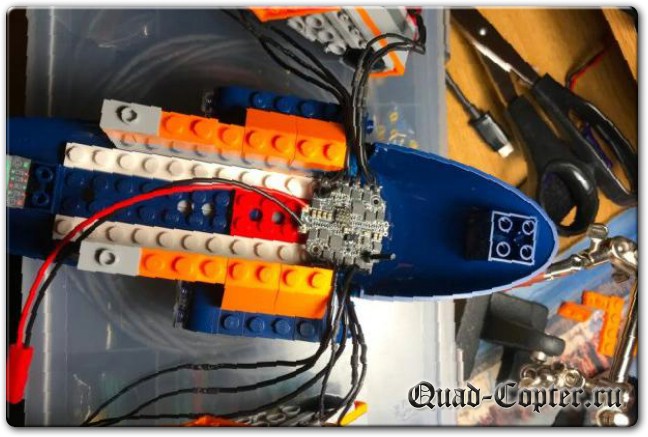
Шаг первый: сборка Лего
Сначала мастер собирает LEGO-Arctic. Затем модель частично разбирается. Внутри нужно разместить батарею и контроллер, соблюдая балансировку модели.



Шаг второй: крепление двигателя
Расположение крепежных отверстий стандартного бесщеточного мотора 1806 практически такое же, как и у шпилек на стандартной пластине LEGO 2x2. Каждое крепление «двигателя» на квадрокоптере имеет плитку темно-серого цвета 2x2 (LEGO 3022) и сверху плитку светло-серого цвета 2x2 с вертикальным штифтом (LEGO 2460), которая обычно удерживается на ступицах пропеллера LEGO.
Мастер сверлит крепежные отверстия. На моторах, по центру имеется отлив. По центру плитки сверлится отверстие под нее. Закрепляет двигатели.









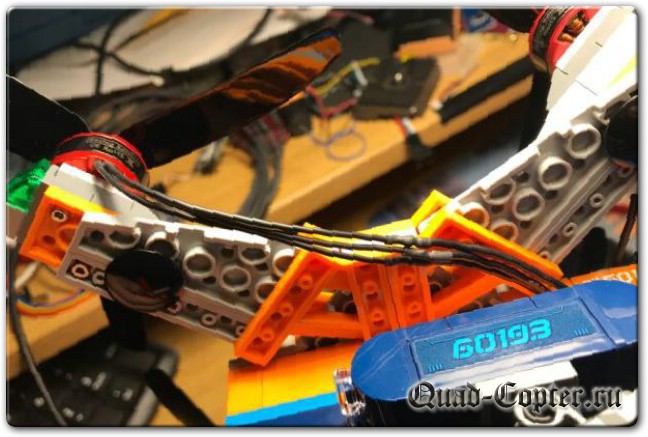
Шаг третий: плечи
Переставляя «плечи» квадрокоптера, можно немного изменить компоновку, чтобы обеспечить более широкое или более узкое расположение двигателей и расположение винтов относительно друг друга.
Стандартная сборка LEGO (первое фото) имеет «плечи» и двигатели, расположенные широко (горизонтально) с довольно большим перекрытием винтов. Мастер переделывает «плечи» и разводит двигателя и, соответственно, винты.



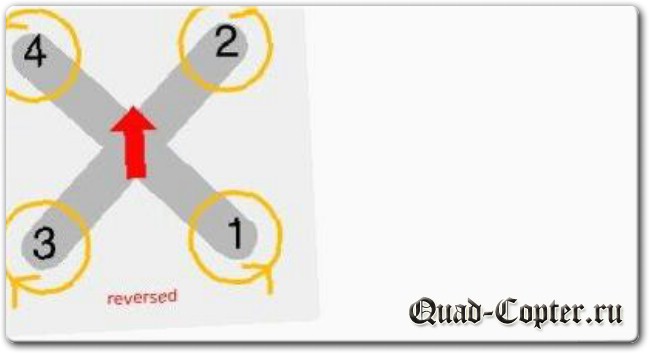
Шаг четвертый: электроника
Согласно схемы производит монтаж электроники. На первом фото приведена схема направления вращения двигателей. Направление вращения, так же, можно будет изменить на этапе программирования.

После того, как монтаж завершен, и перед подключением батареи, мастер проверяет соединения, во избежания обрыва или замыкания.
При включении питания вы должны увидеть включенные огни контроллера полета и несколько звуковых сигналов от ESC.
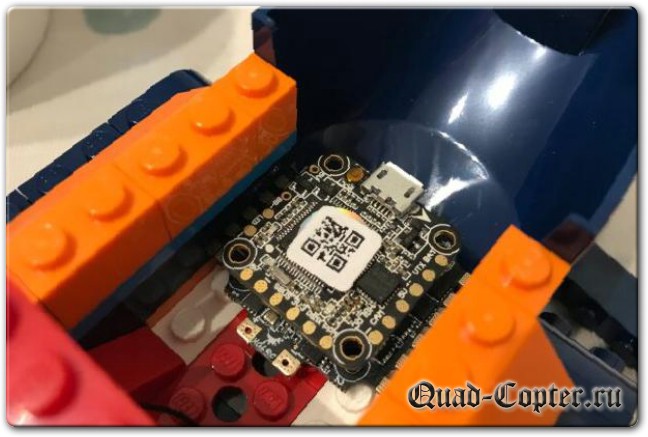
Шаг пятый: настройка
Теперь, когда все подключено, пришло время настроить контроллер. Это означает загрузку программного обеспечения (встроенное программное обеспечение), которое выполняет задачу декодирования управляющих сигналов от передатчика RC, обработки входного сигнала датчика (ускоритель, гироскопы) и предоставления управляющих сигналов для ESC для вращения двигателей с заданной скоростью.
Снимите пропеллеры для безопасности! Батарея не требуется для первых нескольких шагов настройки, только питание USB.
Подсоедините кабель micro USB к контроллеру полета. Обратите внимание, что это может быть легче сделать, если контроллер не прикручен к корпусу
Скачайте и залейте соответствующую прошивку для контроллера полета.
Настраивает режимы.
ARM вкл / выкл
HORIZON для самовыравнивания / ACRO для традиционного полета FPV
BEEPER - полезно, если вы потеряете модель в высокой траве или кустах.
Вкладка «Моторы» - используйте эту опцию для проверки каждого двигателя в отдельности, и, что важно, отметьте направление вращения каждого из них
Исправьте любое неправильное направление вращения с помощью конфигуратора BLHELI
После всех этих шагов можно отключить USB и батарею, а затем включить питание и проверить, что все работает:
Включить передатчик и питание
Подключите батарею и установите квадрокоптер на ровном участке поверхности
Включите переключатель ARM, и моторы должны начать вращаться с низкой скоростью
Проверьте дросель увеличивая обороты
В горизонтальном режиме попробуйте наклонить квадрокоптер и убедитесь, что двигатели реагируют соответствующим образом, например, наклоните его вперед, и передние двигатели будут ускоряться.












Шаг шестой: окончательная сборка
Практически вся конструкция корпуса держится с помощью монтажных замков. Единственно при креплении моторов мастер использует термоклей.

Из конструктора Лего можно сделать идеально симметричную раму для квадрокоптера.
Искал повод чтобы поиграть с конструктором снова? Вот тебе веская причина :)
Такой дрон дешев, и не требует специальных инструментов как например в этой инструкции (рекомендую взглянуть для сравнения и на нее тоже).
Я использовал набор Лего Техник, потому что у него есть отверстия в "кирпичиках" конструктора.
Мотор и летный контроллер я взял от популярного дрона Hubsan X4 (не нужно покупать дрон целиком, только запчасти).
Достань свой конструктор, смахни с него пыль и вперед!
Шаг 1: Инструменты и материалы
1. Лего
2. Паяльник
3. Пластиковые фиксаторы
1. Полетный контроллер Hubsan 107l или 107c (берите 107l если планируете установить на дрон LED лампочки, 107c если хотите установить камеру)
2. 4 двигателя (типа hollow cup) на 7мм.
3. 4 винта (и если хотите, возьмите один два про запас)
4. Аккумулятор на 3.7 вольта + зарядное устройство.
5. Пульт управления Hubsan
Пульт стоит не мало, если у вас его нет, то возможно выгоднее будет купить старый дрон rtf hubsan x4 и разобрать его на части.
Кстати, если вы совсем новичок, не знаете с чего начать, и этой инструкции вам будет не достаточно, вы можете просмотреть 3 абсолютно бесплатных видео курса , на которых вместе с преподавателем вы сможете собрать и запрограммировать своих первых роботов на Arduino и Raspberry. Дерзайте!
Шаг 2: Паяем полетный контроллер
Нужно будет поработать немного паяльником, но ничего сверх сложного в этом нет. Если вы посмотрите на полетный контроллер, то увидите что места, куда нужно припаять проводку от моторов уже отмечены.
И возможно вы уже знаете, что у квадрокоптеров два мотора двигаются по часовой стрелке, а два против. Очень важно чтобы моторчик, который двигается по часовой стрелке был установлен напротив другого такого же. То же самое касается и моторчиков, которые двигаются в обратном направлении.
На контроллере уже есть немного паяльного олова, но этого может не хватить, так что используйте свое если посчитаете нужным.
Шаг 3: Делаем раму для дрона из Лего

Картинки говорят сами за себя. Не обязательно делать именно такую раму, как сделал я. Включите воображение, и у вас получится что то намного покруче! Главное - не делать раму слишком тяжелой.
Шаг 4: Крепим моторы и контроллер

Я уже упомянул ранее что Лето Техник - идеален для этого проекта, потому что внутри элементов есть отверстия. К ним можно прицепить моторы на пластиковые фиксаторы.
Я также использовал двусторонний скотч, для дополнительного крепления, но он не обязателен.
Закрепите полетный контроллер сверху дрона, а аккумулятор под рамой, и вы готовы к отлету!
Шаг 5: Бесплатный видео курс
Если вы хотите научится программировать роботов, дронов, и контроллеры Arduino, но не знаете с чего начать, и забыли школьный курс физики, рекомендуем пройти бесплатные видео курсы.
В серии курсов вы научитесь собирать простых роботов, познакомитесь и научитесь программировать их при помощи микроконтроллеров Arduino и Raspberry.

 | Алексей Тереньтев автор инструкции |
| Иногда что-то делаю сам, но чаще что-то перевожу. | |


Денис Суслов Думаю он много не потянет, скорее всего только мини камеру, которые обычно используются как скрытые и весят 15-20 грамм.

Евгений Чимнев А можно вместо деталей от Hubsan X4 использовать детали от Cheerson CX-10? Cheerson дешевле будет!
Денис Суслов Cheerson CX-10 Mini ты видимо имеешь ввиду. Он меньше в размерах и дешевле, и моторы у него меньше, значит раму нужно будет делать еще более легкой, либо крепить более мощные моторы, но не уверен что это сработает. Хотя, учитывая его цену в 15$ можно попробовать.

Василий Сосновский Читаю, но мало чего понимаю :( А собрать хочется! Может есть какой то материал по общей концепции квадрокоптеров, какие основные части и т.п? Чтобы собрать хотя бы минимальную версию.
Денис Суслов Просто пройдись по инструкции еще раз выполняя шаг за шагом, думаю справишься, а если нет, напиши по каким именно шагам есть вопросы!Вообще концепция квадрокоптеров довольна простая на самом деле: контроллер, батарейки, моторы и винты. Контроллер - это мозг. В нем есть гироскоп и акселерометр, rf приемник и он крутит моторы. Конфигурировать ничего не требуется, при включении коптер сам настраивает себя, сам себя калибрирует, но важно чтобы поверхность на которой он стоит была ровной, точно горизонтальной, иначе исходные показатели о горизонте у него будут не точными.

Николай Мамадаев У меня есть коптер FQ777-124 и мне вот хочется его в другой корпус поместить. Может быть на 3D принтере его распечатать.

Игорь Мотовилов А чем текущий корпус не устраивает? Просто это вроде как карманная модель, из лего конечно корпус к такой сделать скорее всего не выйдет, по аэродинамическим показателям как минимум, а на 3D можно напечатать, да.

FlySky FS i6 - это самый дешевый полноценный пульт для дрона!
Смотреть обзор: FlySky FS i6
Заказать пульт можно здесь.
FlySky FS i6 - это самый дешевый полноценный пульт для дрона!
Смотреть обзор: FlySky FS i6
Заказать пульт можно здесь.
Кинодрон Armor 85 HD V2
Makerfire Armor 85 HD V2 - небольшой квадрокоптер с FPV камерой которая пишет в HD на борту дрона.
Заказать можно здесь.
С промокодом MKZNF09 цена за кинодрон 129$!
Makerfire Armor 85 HD V2 - небольшой квадрокоптер с FPV камерой которая пишет в HD на борту дрона.
Заказать можно здесь.
С промокодом MKZNF09 цена за кинодрон 129$!
DJI Spark - умный миник
DJI Spark - современный селфидрон!
Смотреть обзор: Обзор DJI Spark
Заказать можно здесь.
DJI Spark - современный селфидрон!
Смотреть обзор: Обзор DJI Spark
Заказать можно здесь.
RunCam v2
Самая удачная камера для Drone Racing
Смотреть обзор: Обзор RunCam v2
Заказать RunCam V2: тут
Самая удачная камера для Drone Racing
Смотреть обзор: Обзор RunCam v2
Заказать RunCam V2: тут
Eachine VR D2 Pro
Видеошлем с записью и 2-я приемниками (Diversity)
Заказать можно: тут
Видеошлем с записью и 2-я приемниками (Diversity)
Заказать можно: тут
Eachine H8 Mini
Самый дешевый, неубивемый квадрокоптер.
Отлично подходит для полетов в доме.
Заказать можно: тут
Самый дешевый, неубивемый квадрокоптер.
Отлично подходит для полетов в доме.
Заказать можно: тут
Мотовездеход, Дрон и Ганза

Гусеницы на WPL. Тесты. Выводы!

How to make Rc plane diy

Трактор с гредйдером на радиоуправлении

Emax TinyhawkS 75mm 2S Micro Whoop

Eachine E58 Mavic Clone Review


Eachine Wizard X220 - Is it the best?

Как сделать мини Racer Quadcopter

FrSky R9M range test! Офигеть дальность! Но я не…

Обзор квадрокоптера Eachine H8 Mini. Полеты на H8…


Контроллер вообще то не связан с максимальными оборотами двигателя. У него тупо пинки в сторону двигателя от 0 до 100%. Максимальные обороты задаются конфигурацией двигателя - числом зубъев.
Оказалось надо было настроить аппаратуру, по каналу 2 было сильное смещение вправо по графику, ну и остальные каналы по немногу были смещены
Несмешной и баянистый анекдот, но нельзя просто так взять и начать эту публикацию не с него – он в лучшем виде отображает суть того, о чём пойдёт речь далее. Впрочем, из заголовка вы и так поняли, о чём речь.

Осторожно! Публикация может вызвать непреодолимое желание завести сына.
Урок истории
Компания LEGO (название произошло от датской фразы «leg godt», «Играй с удовольствием») не нуждается в представлении – она была основана в далёком 1932 году, хотя первые знакомые всем пластиковые кубики появились значительно позже, в 1947. Примечательно, что кубики LEGO, выпускаемые в те годы, полностью совместимы с теми, что выпускаются сейчас.
История создания компании, выпущенная компанией Pixar к 80-летнему юбилею LEGO:
Сейчас компания производит около 20 миллиардов деталек в год, то есть более 630 штук в секунду. В текущем модельном ряду более 600 различных конструкторов и так уж получилось, что серия Mindstorms является своего рода вершиной технической мысли, самым-самым навороченным конструктором. Если вкратце, то она позволяет делать вполне себе полноценных роботов.
Как гласит википедия, серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. Сегодня речь пойдёт о LEGO Mindstorms EV3 – последнем (третьем) поколении терминатора конструктора, который был представлен почти год назад, 4 января 2013 года (в продаже появился только спустя полгода).
Отличия EV3 от NXT 2.0
В принципе, главная идея осталась прежней – серия предназначена для сборки программируемых роботов. Поэтому первым встаёт вопрос, а что же поменялось с момента выхода предыдущего конструктора и стоит ли покупать новый? Основное отличие заключается в обновленных датчиках/моторах и, самое главное, в интеллектуальном блоке EV3 (EV означает EVolution):
| EV3 | NXT | |
| Дисплей | Монохромный LCD, 178x128 | Монохромный LCD, 100x64 |
| Процессор | 300 МГц Texas Instruments Sitara AM1808 (ARM9) | 48 МГц Atmel AT91SAM7S256 (ARM7TDMI) |
| Память | 64 Мб RAM 16 Мб Flash Слот microSDHC (до 32 Гб) | 64 Кб RAM 256 Кб Flash |
| USB-хост | Есть | Нет |
| Wi-Fi | Опционально, через USB-донгл | Нет |
| Bluetooth | Есть | Есть |
| Поддержка Apple-устройств | Есть | Нет |
Ещё одно отличие заключается в том, что серия NXT продавалась в нескольких версиях (в разные годы) и представляла собой разные наборы, базовые и ресурсные. У нового EV3 с этим попроще – пока он продаётся в основном варианте – 31313 (601 деталь), из которого можно наделать кучу всего. Но при желании можно докупить базовый набор 45544 (541 деталь) с дополнительными сенсорами и детальками (использовать детали от обычных конструкторов также никто не мешает). Кстати, обратите внимание на пятизначные артикулы – на такую нумерацию компания перешла в 2013 году.
Что касается совместимости, то тут было проделано всё возможное. Все NXT-сенсоры и моторы совместимы с EV3 и распознаются как NXT. EV3-сенсоры не работают с NXT, но EV3-моторы вроде как совместимы. NXT-кирпичик может быть запрограммирован софтом от EV3, но некоторые функции могут быть недоступны, а вот запрограммировать EV3-кирпичик NXT-софтом без сторонних решений не получится.
Внутри коробки
Ещё когда я сам был маленький и ездил с родителями в центральный Детский Мир (когда он ещё был), на Лубянку – уже тогда я не мог оторвать глаз от коробок с LEGO. Тогда не было ни Гиктаймс, ни даже Хабра, но с тех пор коробки остались всё такими же яркими и сочными, даже во взрослом возрасте активируют процесс слюновыделения ) В этом плане другим производителям есть чему поучиться.

Часть коробки, на самом деле, представляет собой (если её разрезать) трассу с различными цветовыми зонами, которую можно использовать для роботов с сенсорами цвета.
Все детальки аккуратно разложены по пакетикам, в комплекте – инструкция и набор наклеек. Давайте вкратце пройдёмся по тому, что положили в комплект.

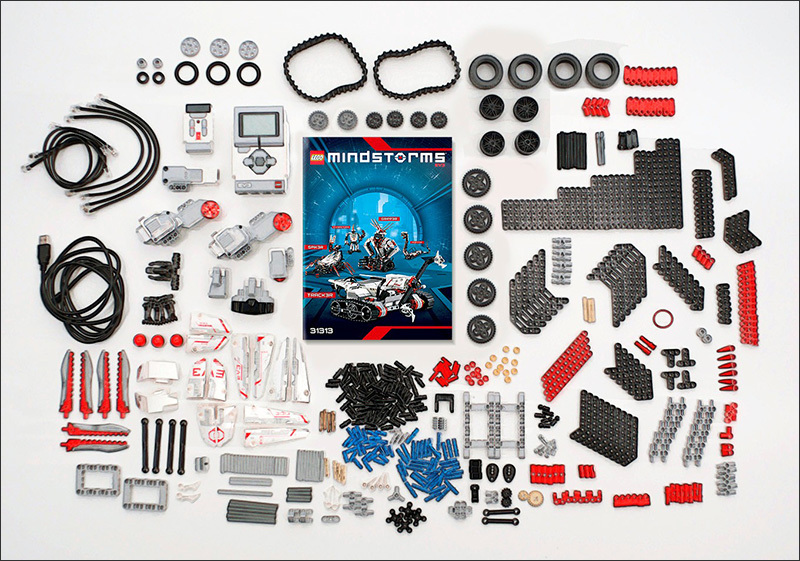
Сам EV3, он же интеллектуальный блок, он же сердце системы, он же «кирпичик» или «кубик». Служит центром управления и энергетической станцией для вашего робота и имеет следующие функциональные элементы:

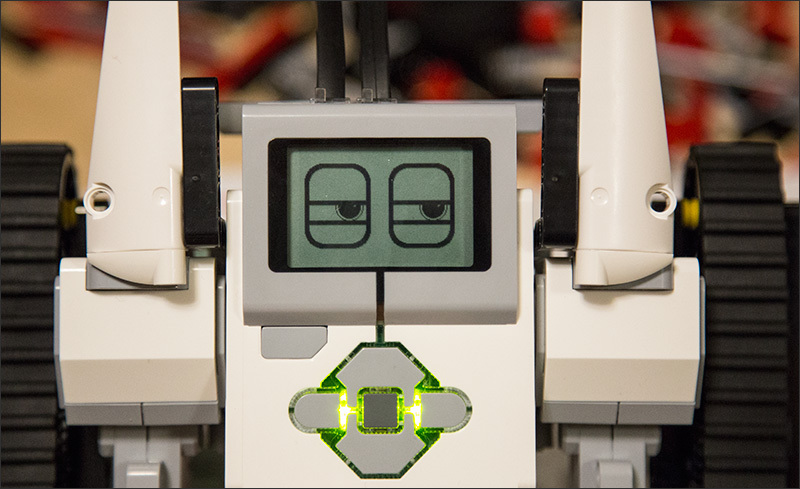
– Многофункциональный монохромный дисплей с разрешением 178х128
– Шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы
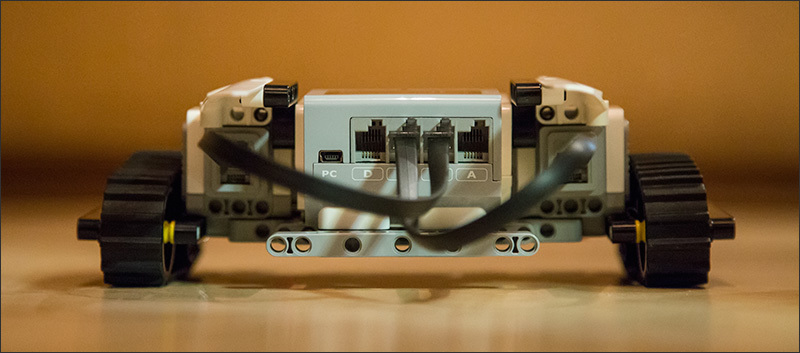
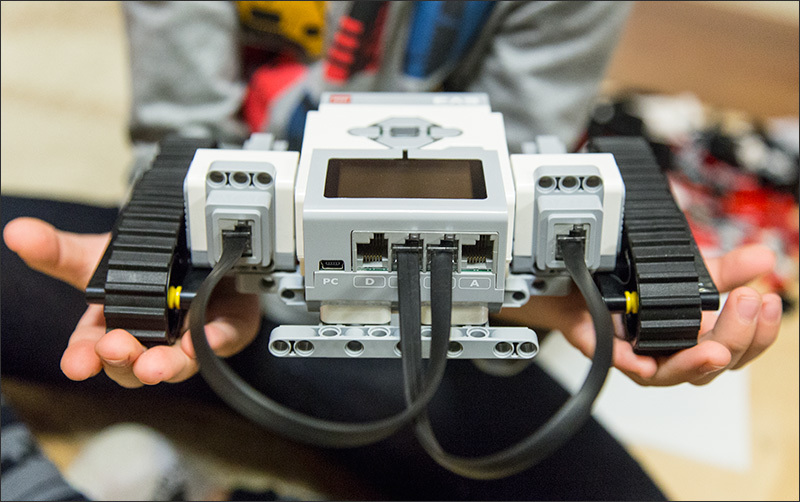
– 4 порта ввода (1, 2, 3, 4) для подключения датчиков
– 4 порта вывода (A, B, C, D) для выполнения команд
– 1 разъём miniUSB для подключения EV3 к компьютеру
– 1 порт USB–хост (для соединения нескольких EV3 в одну цепь, например)
– 1 слот для карт памяти формата microSD (до 32Гб) – для увеличения объёма доступной памяти EV3
– Встроенный динамик



Кубик EV3 также поддерживает Bluetooth, WiFi (через USB-адаптер NETGEAR WNA1100 Wireless-N 150), для связи с компьютерами имеет программный интерфейс, позволяющий создавать программы и настраивать регистрации данных непосредственно на микрокомпьютере EV3.
» Большой EV3-сервомотор (2 штуки). Cоздан для работы с микрокомпьютером EV3 и имеет встроенный датчик вращения с точностью измерений до 1 градуса. Используя этот датчик, мотор может соединяться другими моторами, позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения может использоваться и при проведении различных экспериментов для точного считывания данных о расстоянии и скорости.

– Встроенный датчик вращения с точностью измерений до 1 град
– Максимальные обороты до 160-170 об/мин
– Максимальный крутящий момент в 40 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Средний EV3-сервомотор. Идеален для задач, когда скорость и быстрота отклика, а также размер робота важнее его грузоподъёмности.

– Встроенный датчик вращения с точностью измерений до 1 градуса
– Максимальные обороты до 240-250 об/мин
– Максимальный крутящий момент в 12 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Датчик цвета (EV3). Способен определить 8 различных цветов, хотя также может использоваться как датчик освещённости.

– Измеряет отраженный красный свет и внешнее рассеянное освещение, от полной темноты до яркого солнечного света
– Фиксирует и определяет 8 цветов
– Частота опроса до 1 кГц
– Автоматическая идентификация программным обеспечением EV3
» Датчик касания (EV3). Позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение. Также способен определить количество нажатий, как одиночных, так и множественных.
» Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.

– Измерения приближения/удаления в радиусе 50-70 см
– Радиус улавливания ИК-сигналов до 2 метров
– До 4 индивидуальных каналов приёма сигнала
– Получение удаленных ИК-команд управления
– Автоматическая идентификация программным обеспечением EV3
» Удалённый инфракрасный маяк. Разработан для использования с ИК-датчиком EV3. Маяк излучает ИК-сигнал, улавливаемый датчиком – может использоваться в качестве пульта дистанционного управления микрокомпьютера EV3, передавая сигналы на ИК-датчик.
– До 4 индивидуальных каналов передачи сигнала (переключатель прямо на корпусе)
– Имеет кнопку и тумблер для включения/выключения
– При работе ИК-маяка горит зелёный светодиод
– Автоматическое отключение при простое более 1 часа
– Радиус действия до 2 метров
В отдельном пакетике смотаны провода для подключения датчиков и моторов к кубику, а также USB-шнур для подключения кубика к компьютеру.

Стоит отметить два важных момента. Во-первых, существуют другие датчики Lego, такие как:
» Гироскопический датчик (EV3). Цифровой гироскопический датчик EV3 позволяет измерять движение вращения робота, а также улавливать изменения в его движении и положении. Режим измерения углов с точностью до ± 3 градуса; встроенный гироскоп улавливает вращения с моментом до 440 град/с; частота опроса до 1 кГц.
» Ультразвуковой датчик (EV3). Генерирует звуковые волны и фиксируюет их отражения от объектов, тем самым измеряя расстояние до объектов. Также может использоваться в режиме сонара, испуская одиночные волны. Может улавливать звуковые волны, которые будут являться триггерами для запуска программ. Измеряет расстояния в пределах от 1 до 250 см, а точность измерений составляет ± 1 см.
А во-вторых, поддерживаются сенсоры и прочие аксессуары от сторонних производителей, таких как HiTechnic и Mindsensors – они предлагают всевозможные джойстики, инфракрасные датчики расстояний, магнитные датчики, компасы, гироскопы, акселерометры, таймеры, мультиплексоры, шаровые опоры, и т.д. Так что, если задаться вопросом, можно найти много всего интересного.

В общем, как вы уже поняли, LEGO – это для реальных пацанов!
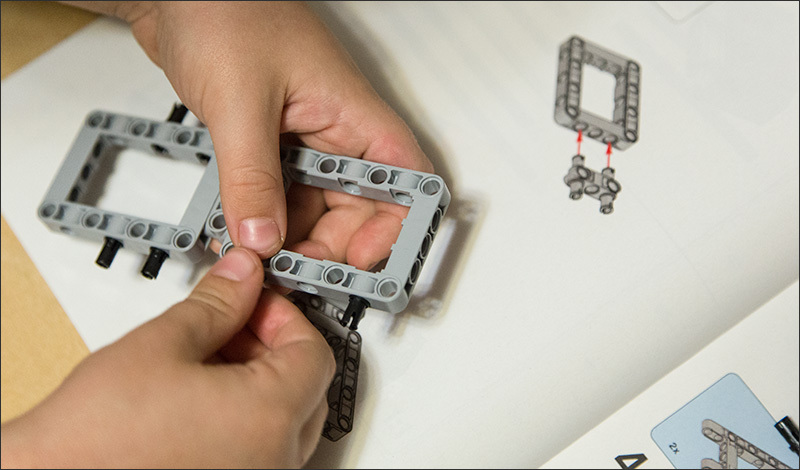
Первая модель
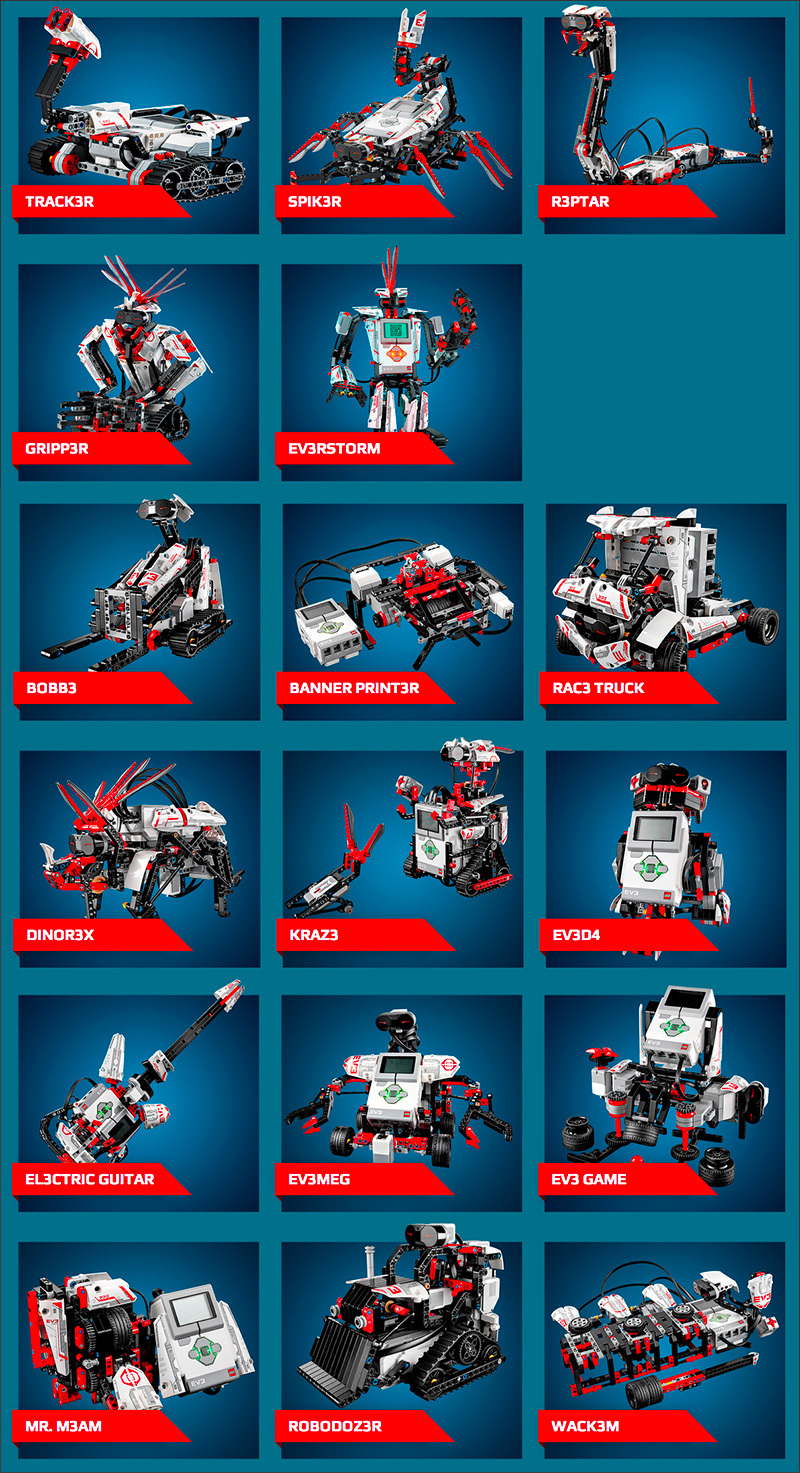
В комплекте с конструктором идёт бумажная инструкция, по которой можно собрать одну-единственную модель – некое подобие гусеничной самоходной машины.
Сначала я удивился, ведь даже в самых простых наборах (серии типа LEGO Creator) всегда идёт несколько инструкций, а тут вдруг бумаги пожалели или места в коробке не нашли. Оказалось… что только на официальном сайте из набора деталей предлагается собрать 17 разных роботов! Поэтому 17 инструкций в коробке были бы действительно лишними (и для логистики, и для лесов природы). Вот названия роботов: EV3RSTORM, GRIPP3R, R3PTAR, SPIK3R, and TRACK3R. ROBODOZ3R, BANNER PRINT3R, EV3MEG, BOBB3, MR-B3AM, RAC3 TRUCK, KRAZ3, EV3D4, EL3CTRIC GUITAR, DINOR3X, WACK3M, и EV3GAME – инструкции для них придётся качать из инета, равно как и софт для подключения EV3 к компьютеру.
Инструкция наиподробнейшая, накосячить сложно. Сын сказал , что детали в пакетиках расфасованы не очень удачно – на первой же странице может потребоваться вскрыть 3 разных пакета, но это тоже мелочи.

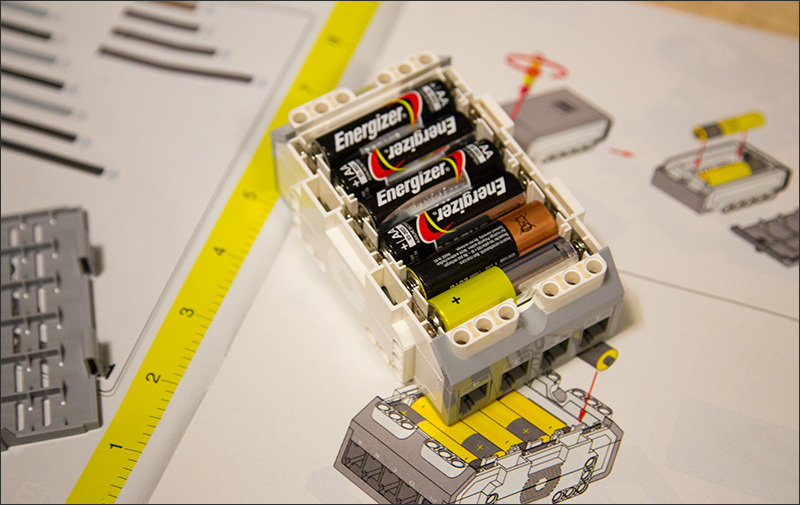
Кубик EV3 необходимо запитать, для чего можно использовать аккумулятор (нет в комплекте) или 6 пальчиковых батареек. Забегая вперёд – ещё 2 батарейки (но уже мизинчиковых) понадобятся для питания ИК-маяка (он же пульт ДУ).
Первую модель ребёнок (7 лет) собрал примерно минут за 30.
Процесс оказался не таким увлекательным, как, например, сборка моделей LEGO Technics – в инструкции предлагается собрать далеко не самого интересного робота: в нём лишь крупные детали, среди которых были практически все датчики и двигатели – видимо, чтобы продемонстрировать работу каждого из них.
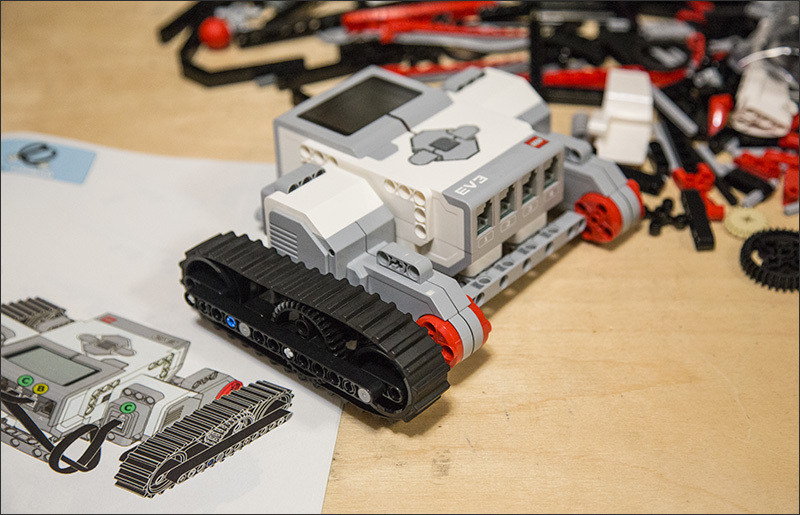
Но вот результат превзошёл все детские ожидания – впервые он собрал модель, которая могла двигаться сама: вперёд-назад, поворот, разворот на месте, крутила щупальцами…
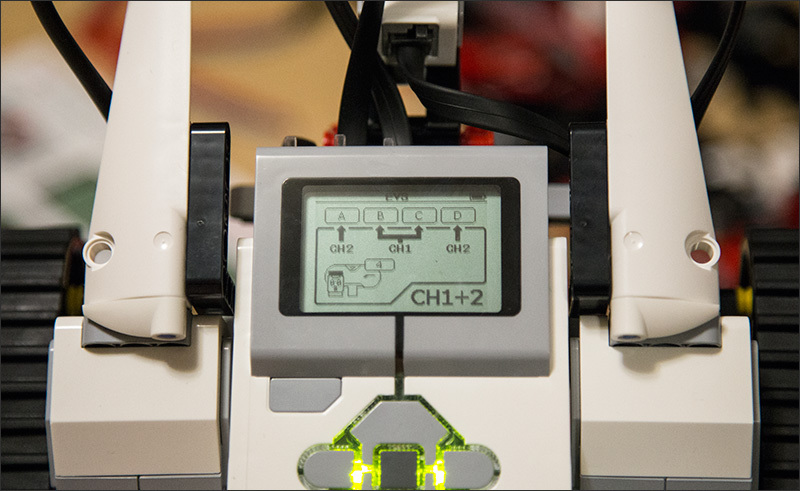
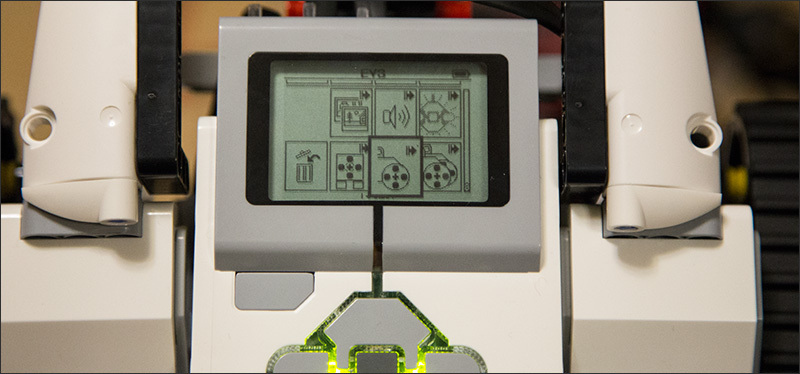
Запуск осуществляется с кубика EV3, для чего следует нажать пару кнопок на лицевой панели. Некоторые действия можно запрограммировать прямо на кубике: выбрать количество итераций, настроить подачу звукового сигнала и так далее – в одной статье всего не рассказать, курите мануалы.
Программировать через компьютер собранную выше модель не пришлось. Тем не менее, возможность такая есть, при этом на разных уровнях хардкорности.
Ребёнку проще всего будет начать с предлагаемого производителем софта, который есть как под Windows, так и под OS X. Во втором случае дистрибутив весит 666 Мб, а установленное приложение займёт гигабайт. Оно называется LEGO Mindstorms EV3 Home Edition и разработано совместно с небезызвестной компанией LabView. На сайте LEGO довольно много обучающих программированию материалов.
Сразу после запуска перед нами возникает интерактивный «гараж» из роботов, которых можно собрать из набора:
Выбираем понравившегося и начинаем собирать: перед нами появится интерактивная инструкция по сборке, видеоролики, а также подборка различных миссий, которые можно выполнить с собранным роботом. Вот почему дистрибутив весил так много.
Не вижу смысла описывать всё в деталях: вы быстрее скачаете приложение сами и увидите, что там есть и на каком уровне. Разве что упомяну один из недостатков, который мне больше всего запомнился: не самый дружелюбный (особенно для детей) интерфейс – от приложения попахивает каким–то банк-клиентом.
Нельзя ещё раз не отметить, что кубиком EV3 можно управлять со смартфона на операционных системах Android или iOS, для чего есть отдельные приложения.
Если всего этого оказалось мало, можете повысить градус хардкора. Для кубика EV3 существуют различные прошивки, которые позволяют расширить его возможности, скорость работы и т.д. Вот, например, альтернативная прошивка leJOS EV3 – прошивка с jvm, позволяющая программировать EV3 на языке Java. Хотите на другом языке? Окей, гугл – в вашем распоряжении почти 60 вариантов на выбор: ASM/C/C++/Perl/Python/Ruby/VB/Haskell/Lisp/Matlab/LabVIEW и многое-многое другое.
Более подробно об этом я рассказывать не буду по нескольким причинам: во-первых, программист из меня полный false (все надежды на сына), во-вторых, пока мы успели собрать только одну модель (и на выходных возьмёмся за вторую), а в-третьих – вы уже и так оформили заказ на этот конструктор и скоро сами всё узнаете ;) Ну а если серьёзно, то статья и так уже огромная – вот лучше две ссылочки изучите: раз и два.
Ну и ещё большой плюс – это LEGO-сообщества, которых полно по всему миру. Можете быть уверены, что на любом из этапов экспериментов с роботами вы всегда сможете найти единомышленников и тех, кто сможет помочь с решением проблемы. Помимо дружелюбных сообществ, на просторах сети выложено огромное множество различных инструкций, моделей, исходников, видеороликов и обучающих материалов. Всё это означает одно: с Mindstorms вы не соскучитесь.
Читайте также: