
Квадрокоптер конструктор своими руками
Обновлено: 07.05.2024
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью в виде обобщения моего личного опыта и опыта других людей, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?
О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации. В качестве альтернативы могу предложить MJX Bugs 3. Обзор на него здесь. Цена от ~120$.
В: Нужно ли паять?
О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?
О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.

Все, что вы получите в комплекте. На картинке не показаны соединительные провода от контроллера к передатчику
1) Набор деталей с Aliexpress ~4000 руб.
1.1 Рама
1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А
1.3 Регуляторы Emax Simon K Series на 12A
1.4 Распределительная плата и провода питания
1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL. Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).
1.6 Соединительные провода от контроллера к передатчику
1.7 4 пропеллера (2 левых, 2 правых)
1.8 Винты и шестигранники. Не знаю как у остальных, а мне положили аж 4 одинаковых шестигранника для винтиков, которыми крепятся моторы, но ни одного для закручивания винтов на раме
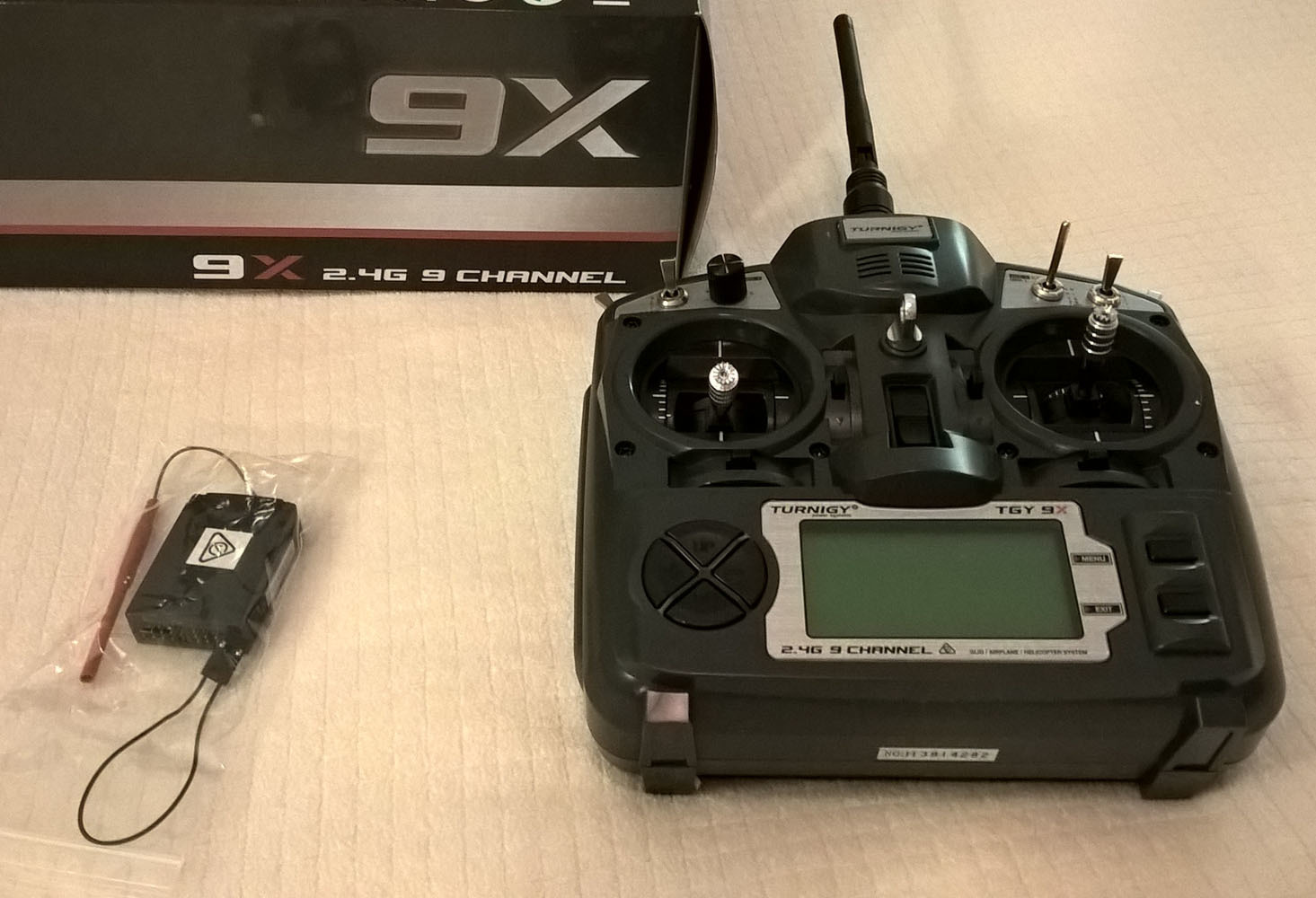
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch + приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?
О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?
О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
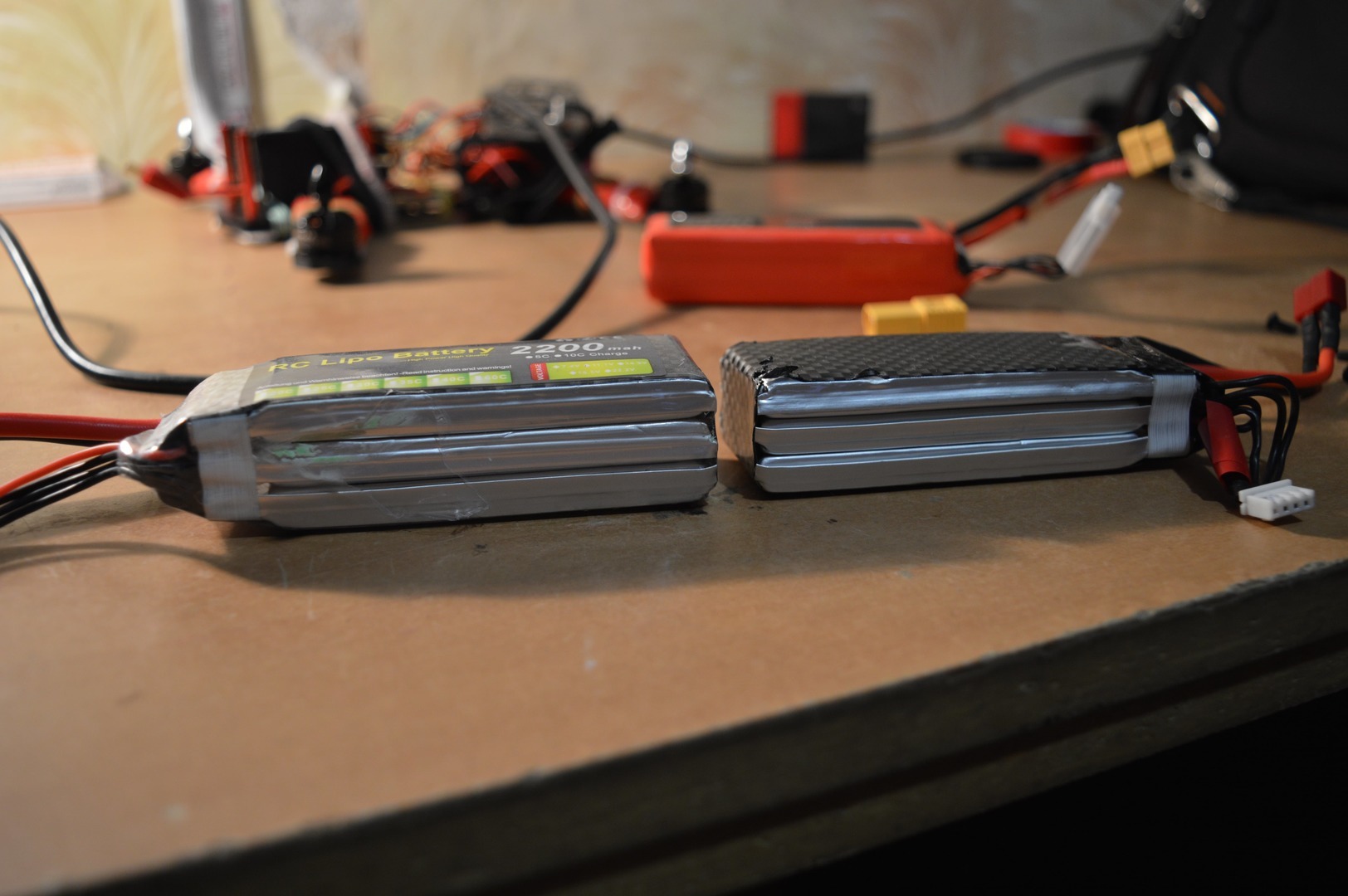
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
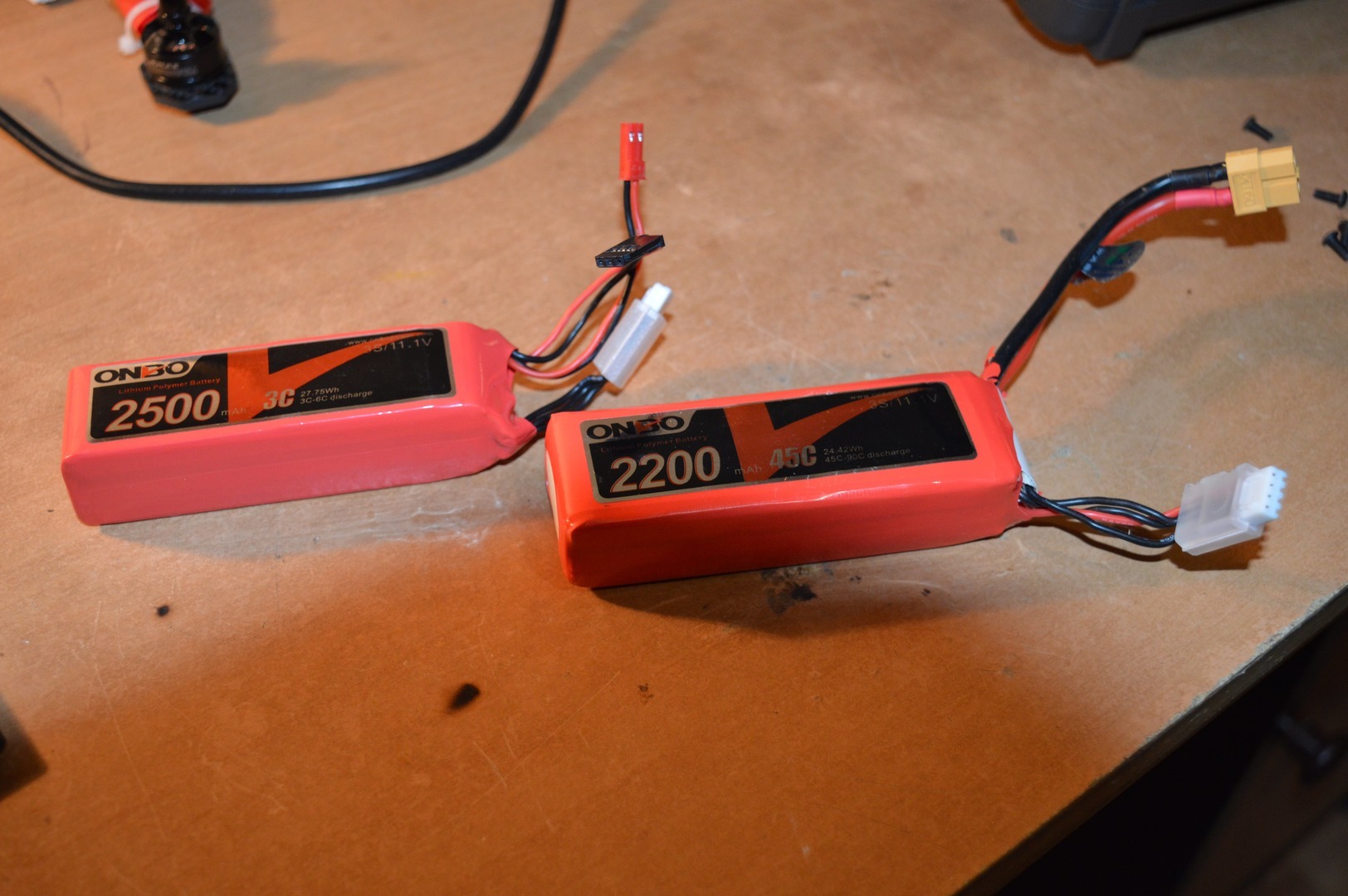
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?
О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.
В: Я же уже купил два. Нужен еще один?
О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема. В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6 ~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?
О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 + 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.
10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму
10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати). Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности
10.3 Термоусадка. Пригодится, когда будете прятать регуляторы
10.4 Пластиковые хомуты 10 см (9 шт.) Для фиксации регуляторов
10.5 Двухсторонний скотч, изолента
10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия
10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сборка
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбочки, о которых я писал выше.


Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей

Крепление двигателей
Пайка
Пайка распределительной платы
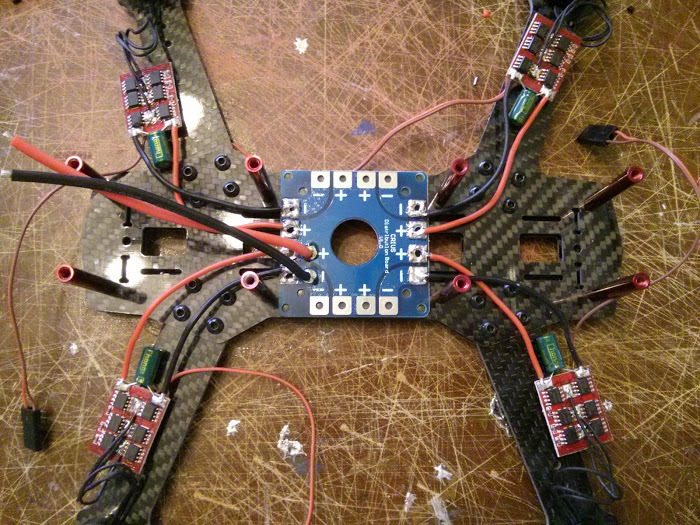
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
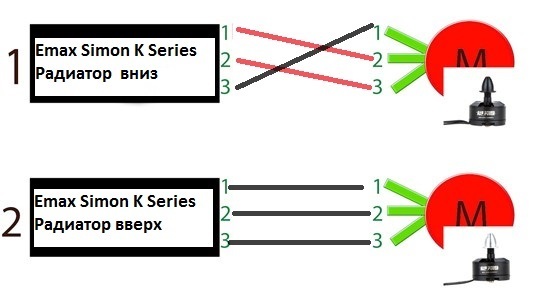
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.

Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Крепим плату питания, регуляторы оборотов
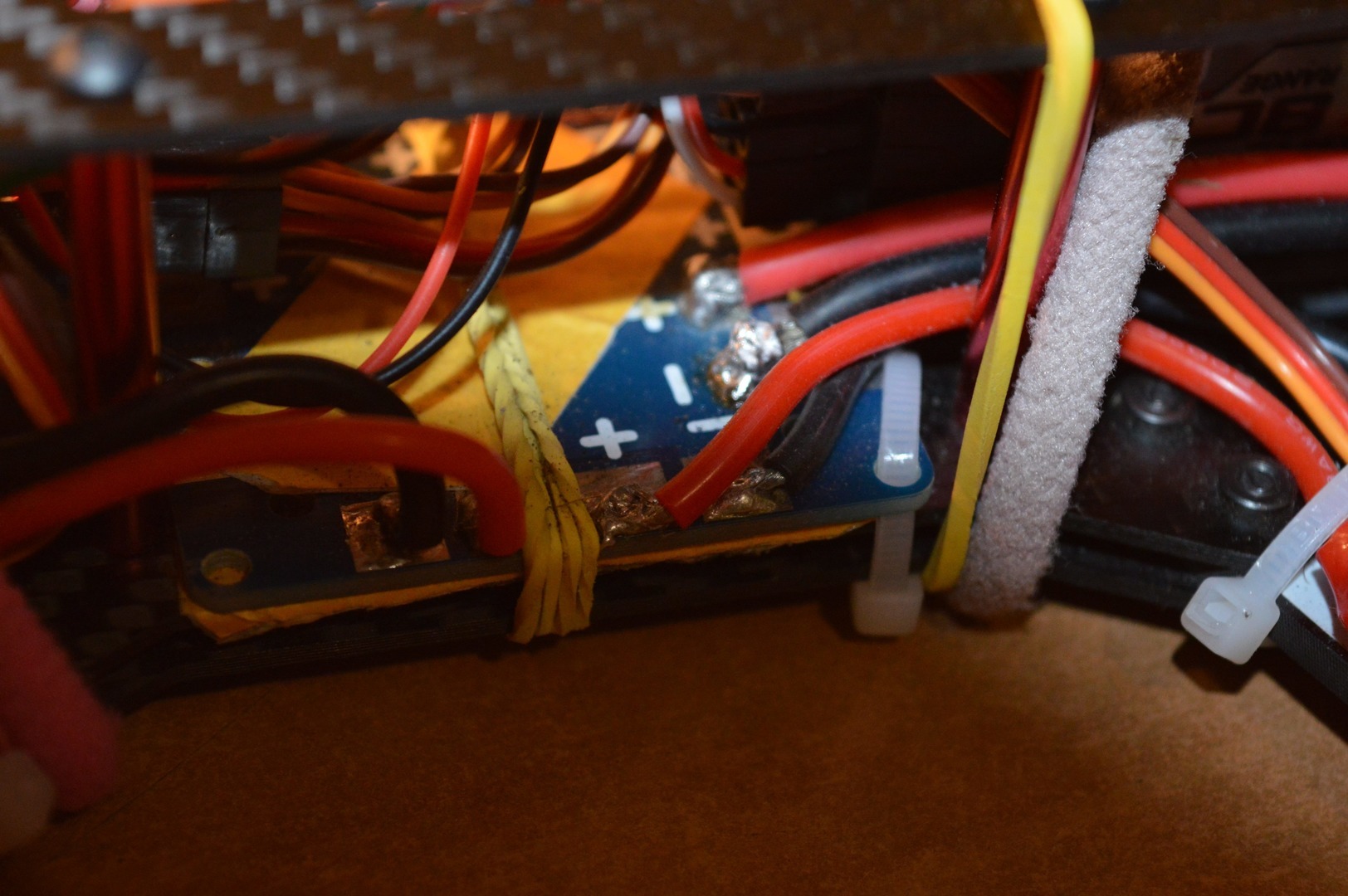
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.
Крепим плату. Два слоя двухстороннего скотча + хомут + резинка
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка + двухсторонний скотч + хомуты + резинка
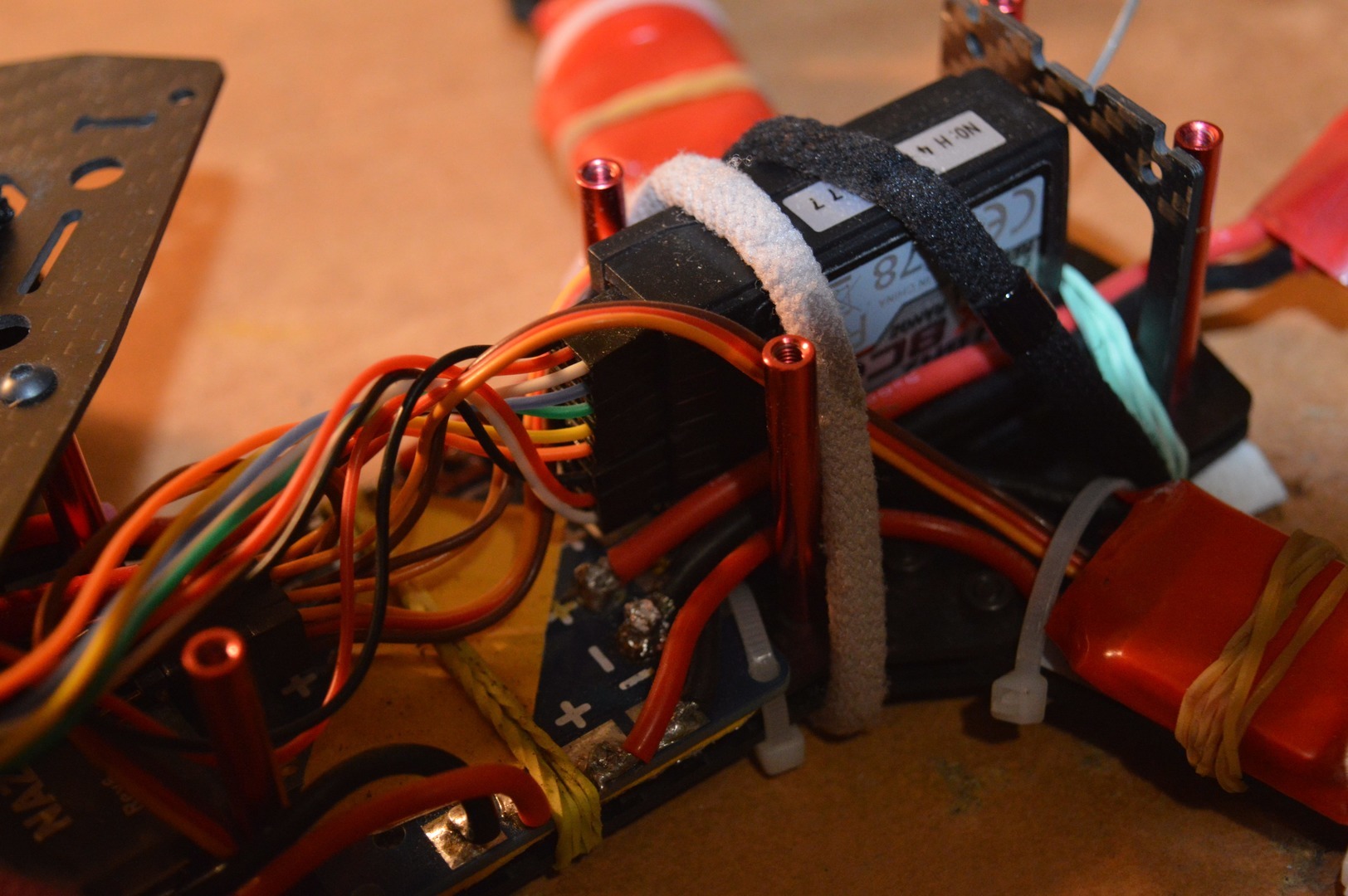
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
Прикручиваем верхнюю часть рамы, смотрим, что получилось
Я также добавил «крепление для камеры».
«Крепление для камеры»
Итого:


О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки

Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Обещанные ссылки на статьи
Рад, если кому-то помог! Также открыт для ваших замечаний и комментариев.
Необходимые детали и узлы
Прежде чем приступить к сборке квадрокоптера своими руками, необходимо обзавестись всеми необходимыми деталями. Мозгом нашей самоделки станет полетный контроллер Arduino Uno. Его возможностей более чем достаточно для того, чтобы управлять беспилотником.

Помимо микроконтроллера, нам понадобятся:
- Аккумулятор (лучше несколько) на 3.7В
- Плата MPU-6050 (на ней установлены гироскоп и акселерометр)
- Транзистор ULN2003A
- Коллекторные двигатели с полым ротором 0820
- Провода
Необходимо сделать несколько замечаний. Так как мы собираем дешевый самодельный дрон, то наш выбор пал на коллекторные движки с полым ротором (так называемые coreless motors). Они далеко не так надежны, как бесколлекторные двигатели, но зато гораздо дешевле стоят. Кроме того, можно обойтись без дополнительных контроллеров скорости.
Зато невозможно обойтись без гироскопа и акселерометра. Гироскоп необходим для того, чтобы квадрокоптер мог удерживать заданное направление движения, тогда как акселерометр используется для измерения ускорения. Без этих устройств управлять коптером было бы гораздо сложнее (если вообще возможно), так как именно они предоставляют данные для сигнала, регулирующего скорость вращения винтов.
Мы не указали в списке необходимых деталей раму. Ее можно приобрести, а можно распечатать на 3D принтере каркас, лучи и крепления для двигателей. Второй вариант нам кажется более предпочтительным, тем более, что в интернете можно без труда найти проекты квадрокоптера.
Распечатанная на принтере рама окажется не только легкой, но и прочной. Но если доступа к 3D принтеру нет, раму можно заказать.
Пошаговая инструкция по сборке
Как напечатать раму и крепеж
3D принтеры можно найти во многих университетах, лабораториях, коворкингах. Зачастую доступ к ним бесплатный. Модели для печати можно создать самостоятельно, используя для этого, например, Solidworks. А можно воспользоваться уже готовыми решениями, при необходимости изменив параметры.
Как настроить акселерометр гироскопа
Для настройки акселерометра-гироскопа (I2C)мы рекомендуем использовать следующую библиотеку. Ни в коем случае не подключайте плату к напряжению 5В, иначе вы моментально ее испортите.

Вкратце расскажем, чем интересна плата I2C с датчиками. Она заметно отличается от обычной платы акселерометра с тремя аналоговыми выходами для осей X, Y, Z. I2C представляет собой интерфейсную шину, обеспечивающую передачу значительных объемов данных через логические цифровые импульсы.
Аналоговых выходов на плате не много, и в этом большой плюс I2C, ведь в противном случае нам бы пришлось использовать все порты на Arduino, чтобы получить данные от гироскопа и акселерометра.
Схема подключения к Arduino
Прежде чем плата I2C сможет обмениваться данными с Arduino, ее необходимо подключить к контроллеру.

Схема следующая:
- VDD -3.3v
- GND — GND
- INT- digital 2
- SCL — A5
- SDA — A4
- VIO – GND
Еще раз обращаем внимание на то, что для питания необходимо использовать необходимо именно 3.3В. Подключение платы к 5В скорее всего приведет к ее поломке (спасти может только регулятор напряжения, но он далеко не всегда присутствует на плате).
Если на плате присутствует контакт AD0, он подключается к земле (GND).
В библиотеке, на которую мы дали ссылку выше, используются перечисленные каналы.
Скетч для Arduino
Преимуществом выбранного для сборки дрона микроконтроллера является относительная простота работы с ним. Вам не придется читать специальные книги, документы и техническую документацию. Достаточно знать основы программирования Arduino, которые, как вы сейчас убедитесь, не так сложны.

Подсоединив плату MPU-6050 к контроллеру, включите его и перейдите по ссылке.
Нас интересует скетч I2C scanner code, вернее, его код.
Скопируйте программный код, вставьте в пустой скетч, после чего запустите его. Убедитесь, что подключение установлено к 9600 (для этого запустите Arduino IDE через Tools-Serial Monitor). Должно появиться устройство I2C с адресом 0×68 либо 0×69. Запишите или запомните адрес. Если же адрес не присвоился, скорее всего проблема в подключении к электронике Arduino.
Затем нам понадобится скетч, умеющий обрабатывать данные гироскопа и акселерометра. В интернете есть множество вариантов, и найти подходящий не проблема. Скорее всего, он будет в заархивированном виде. Разархивируйте скачанный архив, отройте Arduino IDE и добавьте библиотеку (sketch-import library-add library). Нам понадобятся папки MPU6050 и I2Cdev.
Загружаем программу, открываем окно монитора через 115200 и просто следуем инструкции. Через несколько мгновений вы получите данные с гироскопа/акселерометра. Затем следует провести калибровку датчиков.
Установите плату на ровную поверхность и запустите скетч MPU6050_calibration.ino (легко ищется в интернете). Просмотрите код, по умолчанию в нем указан адрес 0×68. После запуска программы у вас появится информация по отклонениям (offset). Запишите ее, она нам понадобится в скетче MPU6050_DMP6.
Все, вы получили функционирующие гироскоп и акселерометр.
Программа для Arduino
По ссылке вы сможете скачать программу для Arduino, с помощью которой коптер будет стабилизирован в полете и сможет зависнуть над землей. В дополнение к программе обязательно скачайте библиотеку с Arduino PID по ссылке.
Программа поможет вам управлять дроном. Алгоритм, используемый для стабилизации, основан на двух PID-контроллерах. Один предназначен для крена, другой – для тангажа.
Разница в скоростях вращения пары винтов 1 и 2 равна разнице в скоростях пары винтов 3 и 4. Тоже самое справедливо и для пар 1, 3 и 2, 4. PID-регулятор производит изменение разницы в скорости, после чего крен и тангаж становятся равными нулю.
Обратите внимание на цифровые пины Arduino для моторов и не забудьте изменить скетч.
Подключение к контроллеру
Для того, чтобы управлять коптером, нам необходимо получить контроль над моторами, подключив их к Arduino. Контроллер дает на выходе лишь небольшое напряжение и силу тока, поэтому подключение двигателей напрямую лишено смысла. Вместо этого можно поставить несколько транзисторов, позволяющих увеличить напряжение.

Для составления схемы нам необходимы:
- Arduino
- Двигатели
- Транзисторы
Все это собирается на монтажной плате и соединяется коннекторами.
На первом этапе следует подсоединить 4 ШИМ выхода (обозначены ~) к транзистору. Затем подсоедините коннекторы к движкам, подключенным к питанию. В нашем случае мы используем аккумулятор на 5В, но подойдет и аккумулятор на 3-5В.
Транзисторы должны быть заземлены, а земля на плате Arduino должна быть подключена к земле аккумулятора. Двигатели должны вращаться в правильном направлении, то есть работать на подъем коптера, а не на его крен.
Переключив контакт двигателя с напряжения 5В на транзистор, вы увидите, что ротор изменит направление вращения. Единожды совершив настройку, больше возвращаться к изменению направления вращения ротора не придется. Теперь нас интересует скорость.
Запустив и проверив акселерометр, мы устанавливаем нашу схему на ProtoBoard. За ее неимением, можно использовать и обычную монтажную плату, предварительно напаяв на ней рельсы для контроллера.
Перед тем, как припаивать акселерометр к плате, необходимо выполнить его калибровку на горизонтальной поверхности. Это поможет добиться более точной работы сенсора в будущем.
Как еще можно модернизировать квадрик
Узким местом коптера являются его коллекторные движки. Если поискать, можно найти чуть более крупные и более мощные моторы, чем предложены в нашей статье, но значительного выигрыша в характеристиках не произойдет.

Впрочем, у нас была цель собрать недорогой квадрокоптер своими руками, и именно поэтому использовались дешевые моторы. Бесколлекторные двигатели заметно дороже, но зато они дадут вам заметно большую мощность и надежность. К ним придется докупить еще и контроллеры скорости, но это действительно эффективная модернизация.
Выбор платы Arduino Uno обусловлен тем, что с нее можно довольно легко снять чип и поставить его на ProtoBoard. Это позволяет уменьшить вес дрона на 30 грамм, но придется включить в схему дополнительные конденсаторы. Подойдет и плата Arduino Pro Mini.
Что касается программы Arduino, то ее можно сравнительно легко изменить и дополнить новыми функциями. Главное, что с ее помощью дрон способен в автоматическом режиме стабилизовать свое положение.
На квадрокоптер могут быть установлены дополнительные модули, например, плата приемника, что позволит организовать дистанционное управление дроном.
На этом мы завершаем статью о создании беспилотника на Arduino. Подписывайтесь на наши обзоры и делитесь полезными материалами в социальных сетях. До новых встреч.
Итак, дай угадаю. Ты задумался – «а не купить ли мне набор для сборки квадрокоптера». Неплохая мысль, если тебе скучно просто купить готовое решение, или у тебя какие-нибудь специфически требования. Однако, плохое, если ты хочешь сэкономить. Скорее всего, выйдет дороже, и, возможно, хуже. Главное, что ты получишь свой, собственноручно собранный, беспилотник. А там уж и до собственных моделей не далеко.
Сегодня я расскажу – что это такое, и за что хвататься новичку и продвинутому сборщику. Основываясь на этом, ты сможешь начать подбирать детали для дрона с камерой, и собрать его своими руками.
Какие наборы бывают
Неожиданно, но наборы бывают разные. Я не буду делить их на типы креплений, рам, двигателей, и прочее. Это не имеет никакого смысла. Главное, что тебе нужно знать, это то, что они бывают «с начинкой» и «рамы».

Рама представляет из себя основной каркас, на который ты сможешь повесить всё, что душе угодно. Тебе придётся самому разбираться в контроллерах, моторах, пропеллерах, прошивках, и так далее. Если ты в теме, и не плохо понимаешь – что, куда и зачем, то это твой вариант.
«С начинкой», это готовый набор. Тебе остаётся только собрать его. Идеально подходит для новичков. Стоит помнить, что в этих наборах могут быть не самые лучшие компоненты, так что придётся внимательно читать отзывы и форумы.
Для новичков
Под словом новичок я подразумеваю то, что ты плохо ориентируешься в мире коптеров. Ты знаешь пару моделей беспилотников, где-то слышал аббревиатуру FPV, и чётко знаешь, что пропеллеры надо крутить. Чем ближе ты к описанному типажу, тем труднее тебе будет выцепить тот самый набор, который тебя удовлетворит.
Лучшим вариантом для тебя будет что-то брендовое. К примеру DJI F450 ARF kit.
DJI F450 ARF kit (12 500 рублей)

Как видишь, вся техническая часть уже решена за тебя. Производитель может тебе предоставить параметры получившегося коптера, так как знает исходные значения. При самостоятельной сборке, рассчитывать их придётся тебе.
Однако, это ещё не всё. Тебе придётся докупить некоторые компоненты:
- Аппаратура управления 5-канальный и выше на 2.4 Ггц
- Полетный контроллер (DJI NAZA-M, DJI NAZA-M с модулем GPS и компасом или DJI Wookong-M)
- Аккумулятор 3S~4S LiPo
- Зарядник
- Дешёвый подвес (для начала) и дополнительная электроника по желанию (FPV камера, светодиоды. )

В итоге, ты получишь крутой коптер, который ты собрал своими руками. При этом, тебе не придётся разбираться в куче параметров, горах документаций, и всех прочих нюансах. Далее ты сможешь его кастомизировать. Менять можно всё, до чего дотянутся руки, а они дотянутся, поверь.
Сразу докупи запчасти. Как минимум – пару запасных пропеллеров. Обязательно пригодится.
Сейчас я привёл тебе только пример того, от чего тебе стоит отталкиваться. Для более ясной картины я расскажу о том, на что конкретно нужно обращать внимание.
- Много свободного пространства в раме. Будет просто работать
- Это КВАДРОкоптер. Я очень не советую начинать с других компоновок. Ты настрадаешься даже с настройкой этого аппарата, а уж о каком-нибудь страшном октокоптере с соосным расположением пропеллеров думать пока рано
- Элементы каркаса так же являются и печатными платами (плата разводки). Это очень приятный бонус. У тебя не возникнет путаницы с проводами, ты просто физически не сможешь поймать КЗ, и у тебя будет шанс перепаять ещё раз, ели что-то пошло не так
- Большой запас прочности и мощности. Тебя не будут ограничивать разнообразные параметры. Тут всё сделано так, чтобы дать тебе как можно больше свободы. Тебе не придётся выбирать между лампочкой и камерой
- Красивый внешний вид. Даже если ты решил, что для тебя это не важно – это важно. Когда ты соберёшь свой коптер, посмотришь на него, и видишь торчащие провода, хомуты, замотанный синей изолентой аккумулятор и прочие косяки, которые присущи неопытному сборщику – мысль о том, что надо было купить готовый, тебя сожрёт. Радости будет куда больше, если он будет красивым.
Для продвинутых

Если ты не плохо разбираешься в коптерах, у тебя был уже, как минимум, один, и ты уже сделал для себя акценты на важных моментах, будь то тяга, скорость, или время полёта, то мне практически нечего тебе сказать. У тебя явно уже сложилось своё видение идеального БПЛА, которое вряд ли совпадает с моим.
Однако, я тебе осмелюсь посоветовать несколько готовых вариантов, которые тебя точно не оставят огорчённым.
Комплект: DJI Naza V2+GPS+F550 ARF kit+landing skid

Крутой, стабильный и тяговитый коптер, выполненный на базе контроллера DJI Naza-M V2. Будет отличным выбором для аэросъёмки. К тому-же это гексакоптер. Думаю, тебе будет интересно попользоваться такой компоновкой.
- Рама гексакоптера DJI F550
- Полетный контроллер DJI Naza-M V2 with GPS
- Силовая система DJI E300
— 6 шт. моторы 2212 размерностью 22×12 мм
— 6 шт. Регуляторы с постоянным током в 15А, OPTO, могут питаться от аккумуляторов 3S-4S, максимальная рабочая частота составляет 450 Гц
— 6 шт. Винты 9.4 дюйма с шагом 4.3
— Коробка с дополнительными материалами - Шасси
Коптер выполнен из очень прочного материала, корпус имеет интегрированную печатную плату, да и в целом выглядит недурно. На мой взгляд- очень интересный агрегат.
Октокоптер на базе рамы Gryphon GD-X8 1200FX

Просто монструозная махина. 1200мм в диаметре. Четыре луча, по два соосных мотора на каждом. Легчайший, карбоновый корпус, посадочные опоры, а главное – подъёмный вес ограничен только силовой установкой.
В рекомендуемой комплектации:
- Полётный контроллер: DJI A2
- Регуляторы ESC: 40-45A
- Пропеллеры: 22-24 дюйма, максимально 26
- Камеры: RED Epic, Canon 5D / C100
- Крепление для камеры: DJI Zenmuse Z15\Freefly systems MOVI MR
- Батареи: от 10000 mah и больше
Это уже не просто коптер, это белаз. Думаю, научившись собирать и отлаживать такие махины- на этом можно даже не плохо заработать. Впрочем, это только пример, который далёк от реальности (из-за цены), но наше дело вдохновить. Собирать любой другой беспилотный летательный аппарат с соосной компоновкой винтов тебе будет очень и очень интересно.
Пошаговая сборка

А нет её! Обманул. Как собирать – дело каждого. Я не знаю какая у тебя будет модель. Могу лишь примерно дать понять – с чем придётся сразиться.
Со сборкой рамы проблем не будет никаких. Ты её просто соберёшь из 4-8 больших кусков.

- Не перетягивай винтики. Если ты сорвёшь резьбу в пластике- будет обидно
- Старайся не перекосить конструкцию. В ней не должно быть напряжений. Если что-то собирается в натяг, значит нужно узнать почему, и ликвидировать проблему
- Помни, что твой контроллер уже имеет передатчики и приёмники сигнала. Тебе их не нужно докупать, но пульт управления подбирай конкретно под них
Проводка
Со сборкой электроники могут быть проблемы. Тебе нужен будет паяльник, и основные навыки пайки. Сложность напрямую зависит от цены. Я уже советовал тебе брать фирменный коптер. Во многом потому, что они делают коннекторы, и не косячат с распайкой контроллеров.

- Думай прежде чем паять. Электроника нежная, и очередной нагрев может не пережить
- Давай деталям остыть. Помни, ты боишься их перегреть
- Если моторы крутятся в одном направлении, то это не моторы неправильные, а подключение. Иногда это можно решить программно, а иногда поменяв местами 2 провода из трёх
- Упаковывай провода как можно компактнее и не скупись на термоусадку для изоляции. КЗ может тебя погубить
- Обычно, ты можешь запитать дополнительную электронику, типа лампочек и камеры от самого контроллера
- Чем дальше провода друг от друга, тем меньше помех. Разделяй их парой слоёв термоусадки, или приклеивай к раме
Ну и в завершение хочется сказать – читай, экспериментируй, спрашивай. Собирать свой квадрик- дело это интересное, и безусловно полезное. Перед стартом советую немного разобраться в теме. Почитать наш и другие сайты, покурить форумы, даже ознакомиться со спецификациями деталей. Это поможет избежать дурацких ошибок на старте. А в итоге, может и дойдёт до сборки квадрокоптера из подручных материалов. Удачи, пилот!
СТОЙ! Чуть не забыл. Видишь кнопочки внизу? С их помощью ты можешь репостнуть эту статью в свою социалочку. Тем самым ты подстегнёшь меня писать больше и лучше. Кстати, больше и лучше можно найти в наших группах. Подписывайся.

Ибо на твой бюджетный, у некоторых вся зарплата месячная уйдет.
P.S. А ведь есть регионы, где и меньше получают
Hubsan h501s дешевле. при прочих схожих
народ, мучает вопрос, а как понять далеко ли будет ловить сигнал управления на коптерах? можно ли например на доме сделать антенну мощную, чтобы увеличить радиус действия?) как то же службы доставки летают по всему городу?

Я хз где задать вопрос, но все же.
Хочу взять квадрик 450
И поставить все на 330 раму, хз зачем.
Есть ли смысл на первом этапе запариваться за движки, или купить набор и мозги себе не клевать?
Спасибо тебе большое!) Когда-нибудь (когда отращу прямые руки и найду немного денег) так же соберу)
Ничего не понятно, но очень интересно.
на долго аккумулятора хватает?
У меня есть что-то общее с фиксатором, если верить окружающим девушкам.
"Лучше взять" реклама detected.
классно! пару-тройку раз по рулить и надоест.

МАФ, ДМРВ, Расходомер 1.8т. Есть ли альтернатива Bosch? Все печально
Статья о пяти контактных Bosch maf sensor. Ни на какую истину я не претендую, все выводы сделаны только на личном опыте и наблюдениях. Все ниже написанное это лично мое не объективное мнение :-)
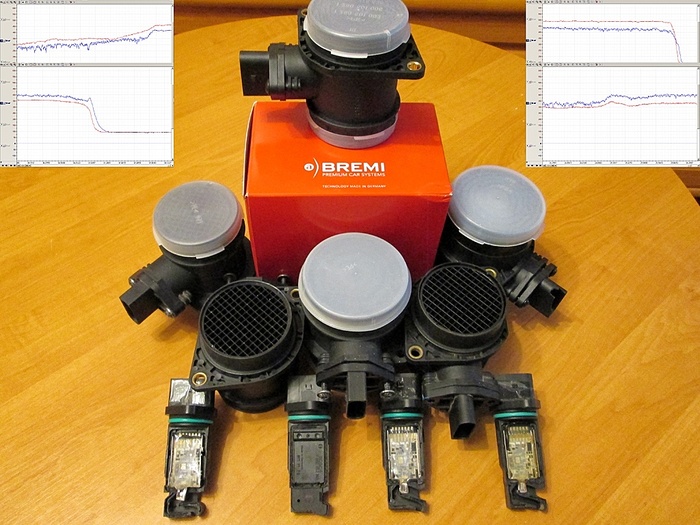
В начале я сразу хочу сказать спасибо SanyB5, DimkArt, Nikolay82reg, naTOYOTe предоставившим материал для экспериментов.
Не секрет, что нормальный расходомер Bosch (в оригинале он же) стоит дорого, на сегодняшний день в районе 9000 -11000 рублей, это чуть больше 100$ они всегда так стоили, ну чуть дешевле были. На самом деле это не дорого но при нынешнем курсе кусается :-) А по сему многие пытаются найти не дорогой аналог-заменитель других производителей что б сэкономить. Выбор огромный, на любой вкус.
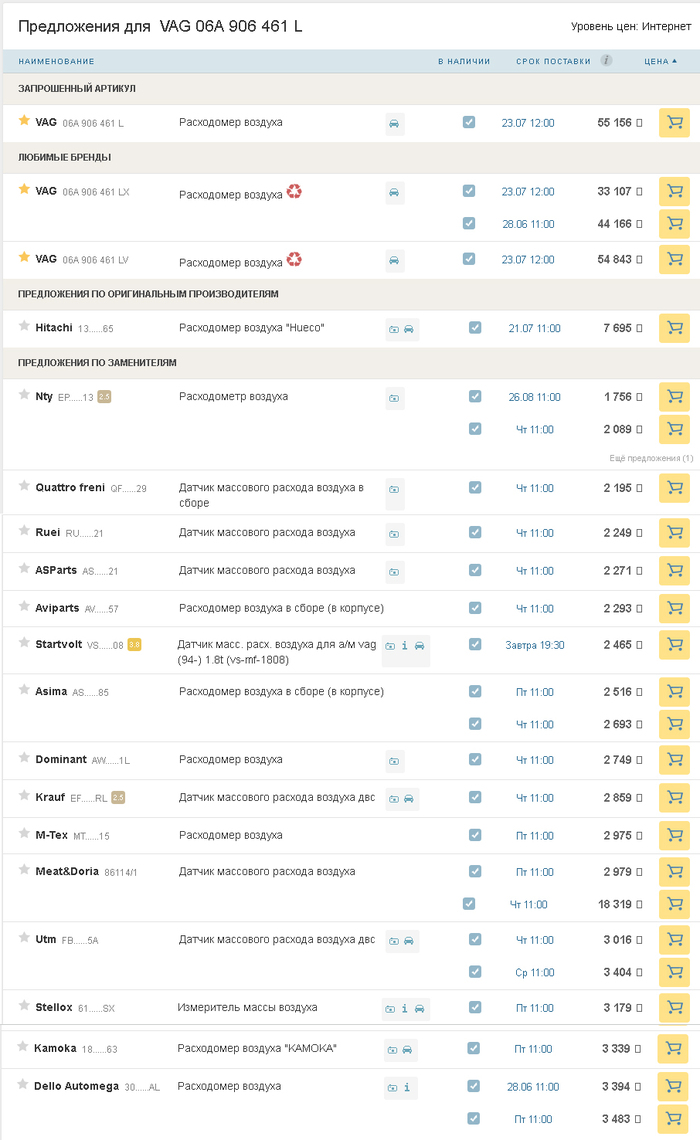
Вот, к примеру, вывел аналоги с ценами на свой 1.8т. VAG 06A 906 461 L. Цены на 20.06.22.
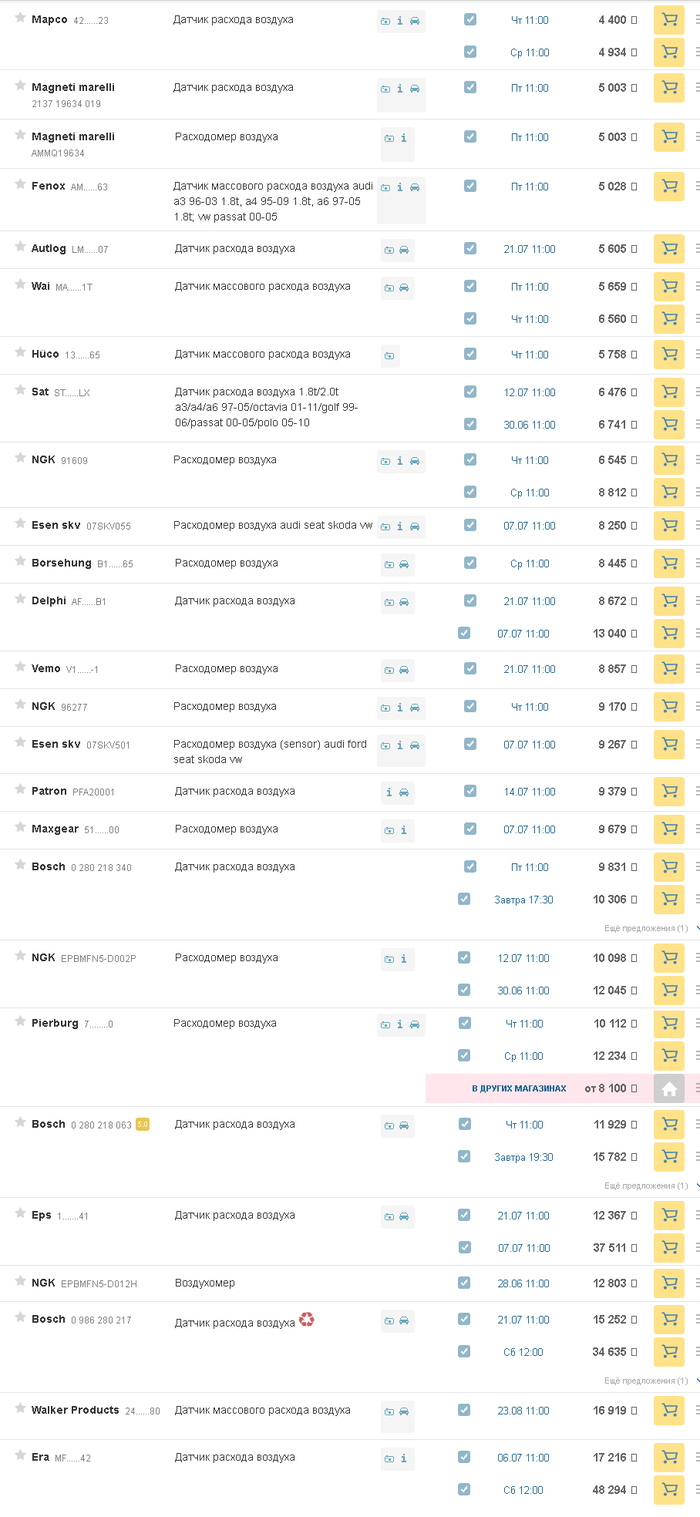
Но вот возникают закономерные вопросы – Почему так дешево стоят аналоги? А нормально ли они работают? Какой у них ресурс? Какие показания? Не будет ли пустой тратой денег покупка аналога? Не платит ли скупой дважды? Вот на эти вопросы я попытаюсь ответить. Соответственно всю линейку заменителей я охватить не могу, так как у меня их нет. Но вот те, что попали ко мне на операционный стол, навеяли печальные мысли – Производители экономят по страшному, в ущерб качеству и ресурсу.
В данной статья я напишу про аналоги от вот этих производителей:
1. NTK, это подразделение NGK (великобритания)
2. Magneti Marelli (италия)
3. Mobiletron (тайвань)
4. Bremi (германия)
5. Hüco (германия)
6. Обычный китай
Список конечно не полный но дает, в принципе, понятие как и из чего делают аналоги.
Хочу обратить ваше внимание на то, что все дальнейшие выводы это чисто личный мой субъективный взгляд на эти мафики и не более. Выводы сами делайте :-) Если коротко то все плохо.
Так как я не писатель то к словам не цепляйтесь :-)
Напомню вкратце теорию.
МАФ(ДМРВ) это датчик который преобразует движение воздушного потока в электрический сигнал, чем больше воздуха через него протекает тем выше электрический сигнал на выходе мафа. Мозг авто смотрит сколько воздуха прошло и соответственно знает сколько нужно бензина (это конечно очень грубо). Вот так вот все просто. Но вот «дьявол кроется в деталях». А детали такие, поток измерить очень просто, но для электронного блока управления авто нужны очень точные данные, прецизионные. Вот тут и нарисовывается засада, очень не просто прецизионно измерять поток воздуха в динамике, не просто. Для таких измерений нужен очень сложный и прецизионный измерительный элемент который не просто сделать и который стоит денег. Производители автомобилей к вопросу измерения воздуха подходят разными путями. Одни, самые экономичные, вообще как таково не измеряют кол-во воздуха, они о количестве судят косвенно, по углу открытия дроссельной заслонки, но нынче таких практически не осталось, экология обязывает :-)
Еще одни, тоже мего экономичные, используют ДАД (датчик абсолютного давления), по давлению на впуске судят о количестве воздуха.
Другие производители используют самый простой маф, который представляет из себя просто одну (две) тоненькую спиральку-проводок натянутые поперек потока в трубе.
Более хитрые производители используют в измерителе два элемента сразу, термометр и «терморезистор», это более точно.
Еще более продвинутые авто производители используют здоровую керамическую платку, на которой нанесены дорожки хитрой конфигурации и все такое, это уже заявка на очень хорошую точность измерения.
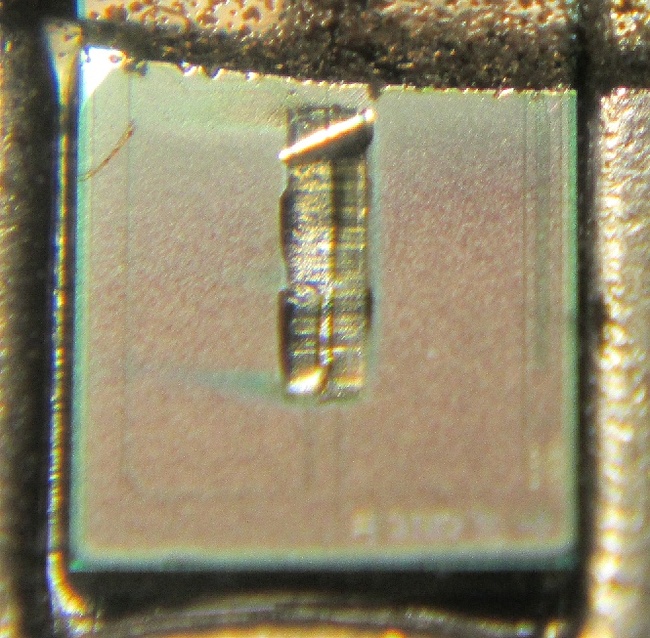
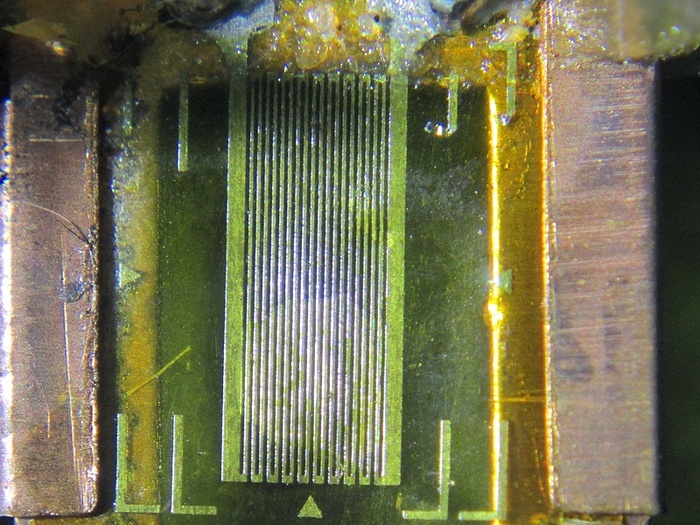
Ну и на конец нормальные производители используют для измерения элемент сделанный по технологии изготовления толстопленочных микросхем. Этот элемент самый точный и прецизионный.
Соответственно под каждый тип измерительного элемента нужен свой мозг, ибо сигнал с разных типов датчиков разный. Я говорю не об уровнях, которые любые можно сделать, я говорю о чувствительности, о времени реакции, об инерции, то есть о тех параметрах которые зависят непосредственно от типа и принципа действия самого измерительного элемента. В каждом типе мозга (эбу) автомобиля живет управляющая программа и она рассчитана именно на свой тип датчика, именно на тип элемента, на реакцию, чувствительность и инерцию элемента. Это я все конечно очень упрощенно и схематично пишу, что б вам был понятен принцип.
Подробные фото правильного бошевского измерительного элемента можно вот тут посмотреть Промывка MAF 1.8т (ДМРВ, расходомер). Как и чем правильно промывать МАФ
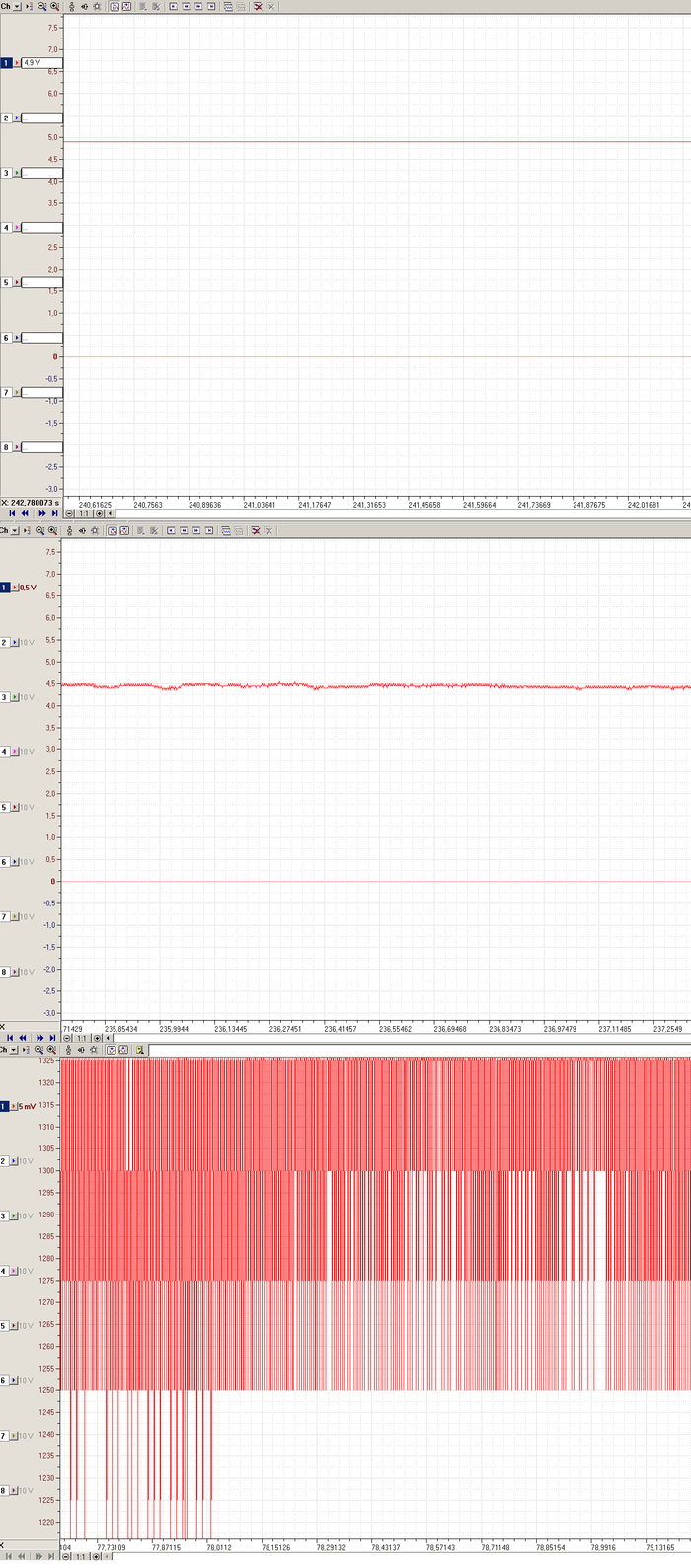
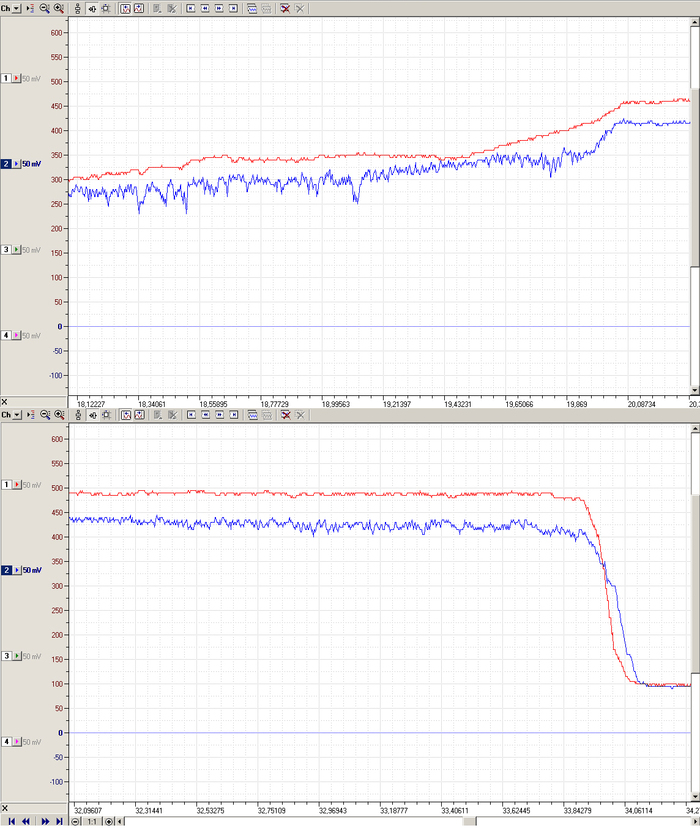
Не буду перегружать статью лишними осциллограммами и подробностями, включу их, только там где мне покажется уместным.
1. NTK, это подразделение NGK (великобритания).
Так как МАФ был новый то разбирать не стал, просто снял параметры.
Вывод простой — МАФ NTK имеет очень плохие параметры, и оказался местами хуже «китая». Покупать его не следует.

2. Magneti Marelli (италия)

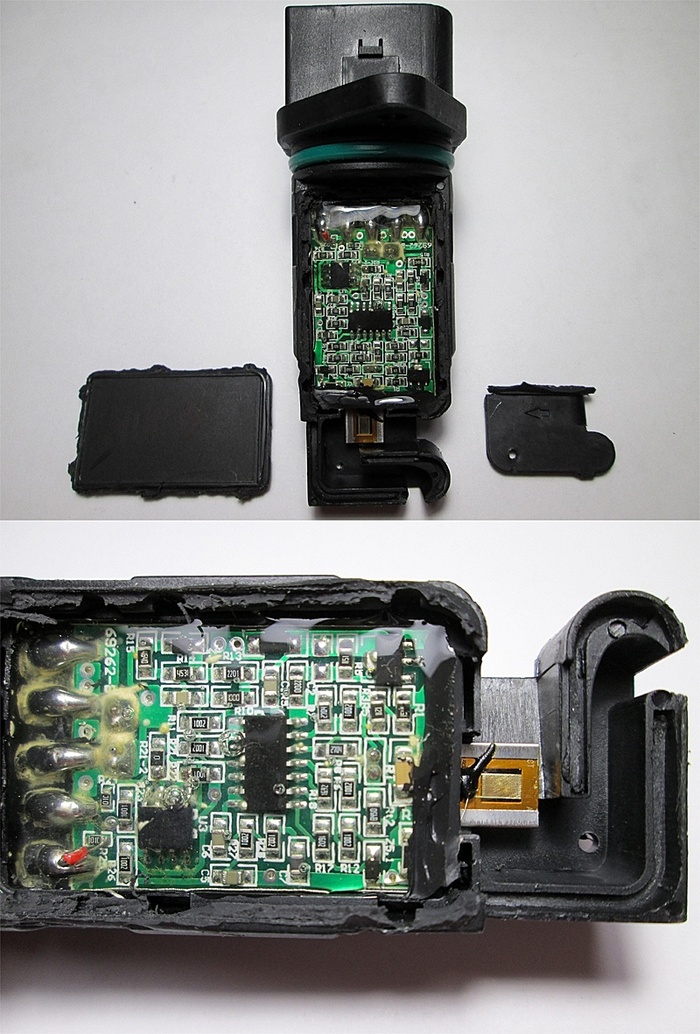
Вскрываем и смотрим что внутри, за одно и подписал что б не перепутать :-)

Вот элемент по крупней. Ну что сказать, никакого прецизионного элемента нет, есть термометр и терморезистор, ниже плинтуса в общем.
Мафик с мизерным пробегом, по пыли видно, заявленный пробег всего 5000.
Показания очень плохие, потолок занижен, середина завышена, в простое шум не детский… В общем маф не по элементу не по сигналу не тянет на аналог :-)
3. Mobiletron (тайвань),
Единственный который мне понравился из за элемента. Но элемент у него скололи и замеры провести не представлялось возможным :-) Но вот дальше интересней, GF-SERVICE купил новый и он тоже оказался дрянью :-( Так что тоже не айс :-)

Вот такая вставка у него.

Вскрываем… Не плохо! Вроде правильный прецизионный измерительный элемент. Правда его кто то сколол, в попытке почистить наверно, мне он вот такой в руки попал.

Вот элемент по ближе, четко видно что Mobiletron использует правильные элементы и работать, по идее, они должны хорошо, но нет, не работает :-) Хотя, конечно, хотелось бы заполучить такой маф новым и снять с него осциллограммы и откатать логи.
4. Bremi (германия)
Bremi мне целых две штуки попалось, дрянь редкая. У Nikolay82reg он отходил 2 месяца всего. У SanyB5 он тоже ровно два месяца отходил, в итоге у обоих жрать бензин начал и коробка пинаться начала, таймер в них что ли:-)))) Обратите внимание, это разные номера Bremi, под разные моторы а глюки и помирание одинаковы.

Вот вставки, чуть воздухозаборник разный.

Разбираем, внутри одинаковы :-)
Элемент все тот же, а точнее его отсутствие, есть термометр и терморезистор, плохо все.
Показания снял ради интереса…
Завышение и не детское. Синий это эталон а красный это подопытные. В общем в помойку.
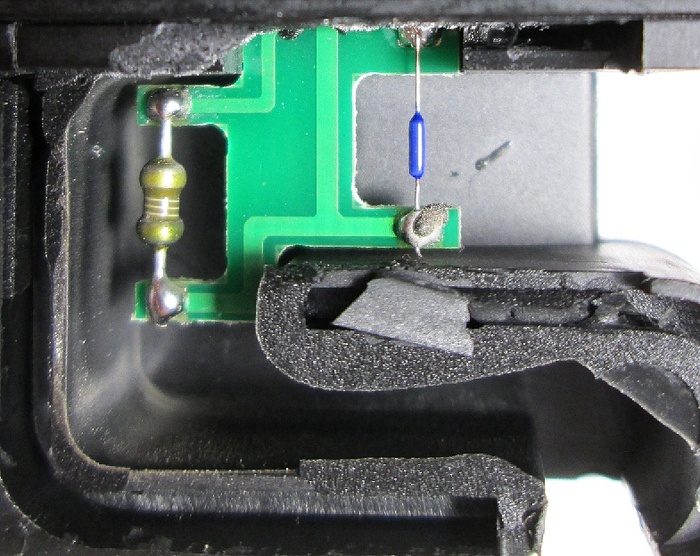
5. Hüco (германия)
У SanyB5 он отходил всего 40 километров, начал косячить по показаниям и пропуски суровые пошли.

Вскрываем и смотрим, о как! Обычный китай, причем самый простой. Блин, а на корпусе написано что Германия :-))) Экономисты блин, корпуса сами льют а вставки в китае где то мешок купили :-))))
Вот по крупнее элемент. Обычный примитивный китай с низкими параметрами, не фабричный а какой то подвальный китай. Странно что он 40 км работал, они обычно сразу не работают нормально :-)))

Снял параметры, занижает (синий эталон). Ну и косяки по реакции. Все ясно с ним…

6. Обычный фабричный (нормальный) китай.
Вот выдержка от туда - Если конкретно то у «китая» занижена немного чувствительность и время реагирования, так же у них потолок показаний всего 200-205 гр/с. Это из за того что измерительный элемент там очень простой и примитивный, по сему они стоят не дорого. На турбо машины ставить на постоянку не рекомендую, а как времянку или на постоянку на атмосферники они нормально идут.
Вот фото нормального заводского китая, элемента.
Вот в принципе и все, вывод очень простой – Скупой платит дважды. Практически никто в аналогах не использует нормальный измерительный элемент, а по сему покупка их просто трата денег, все равно потом за бошиком пойдете в магазин :-)
Скажу вам по секрету, я еще на самом деле штук 8 «заменителей» других фирм держал в руках и везде жопа с элементом, просто не думал пост делать и не фоткал. Названия не привожу так как нет фото доказательств :-)
Добавляю еще один, попал ко мне на днях.
МАФ Delphi попал ко мне в полу убитом состоянии, параметры снять не могу. Но элемент изначально дрянь, вот он.
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
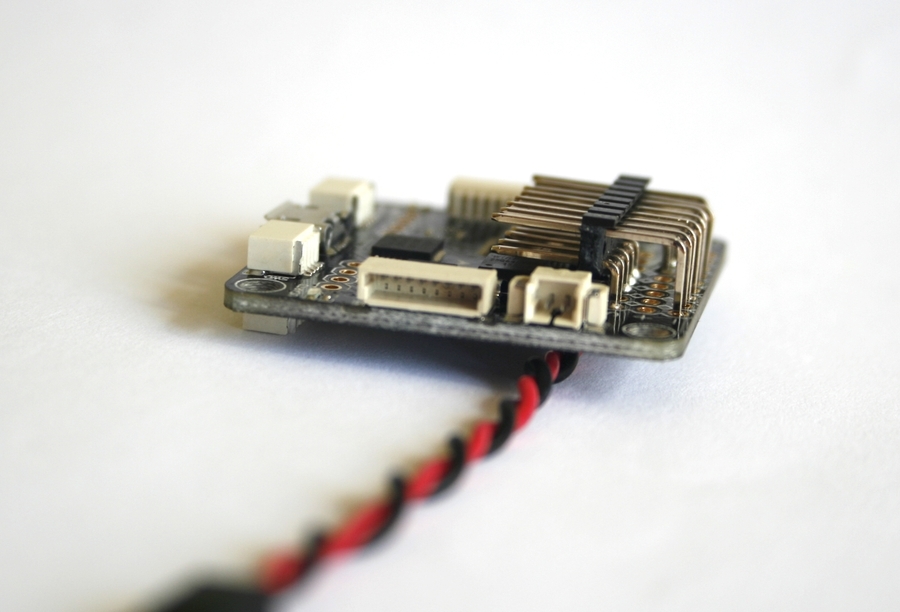
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
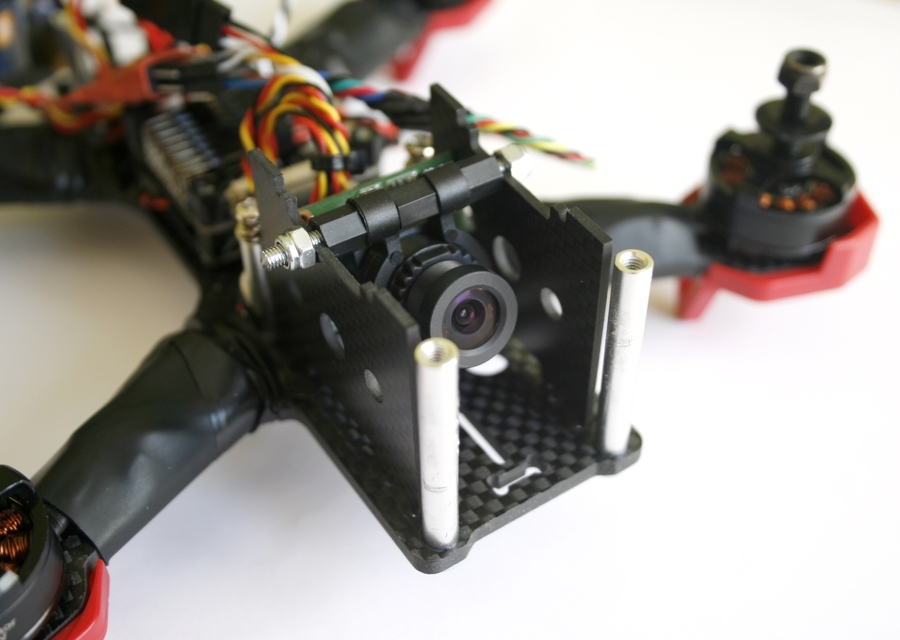
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель. .
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
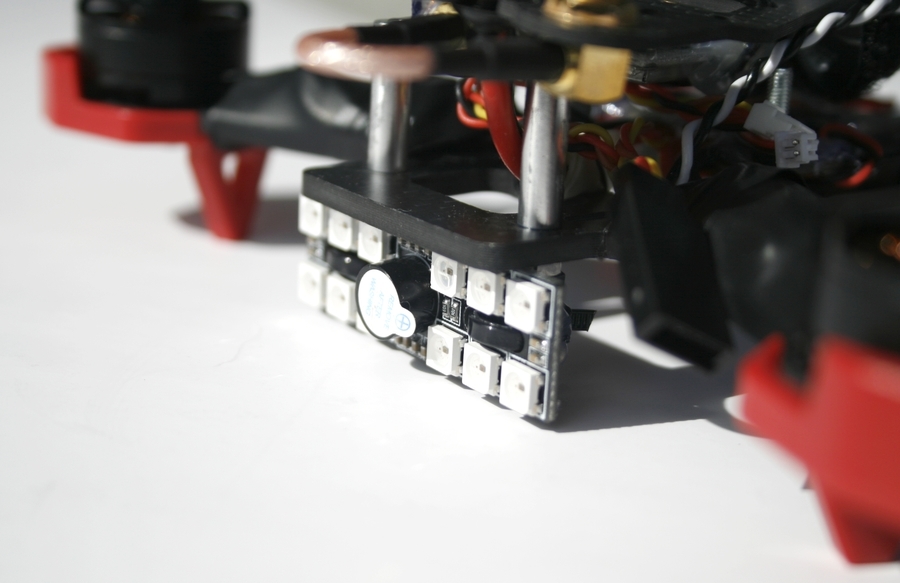
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
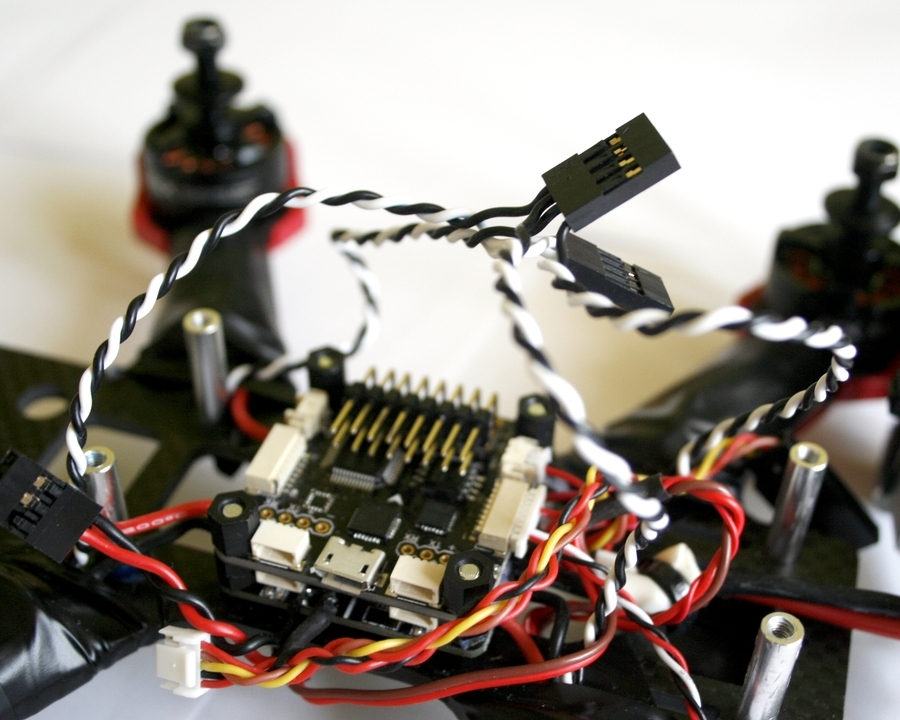
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
Схема проводки
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.

Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
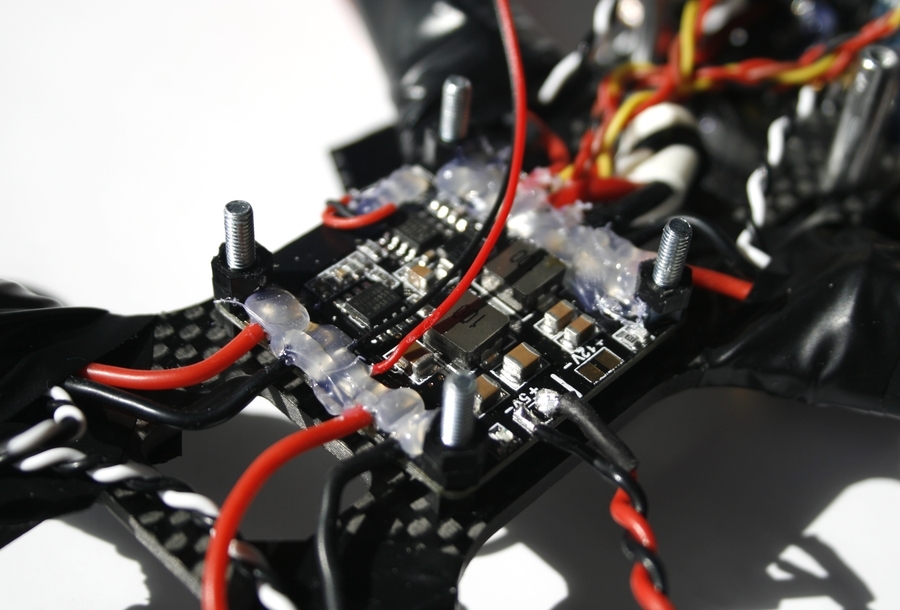
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
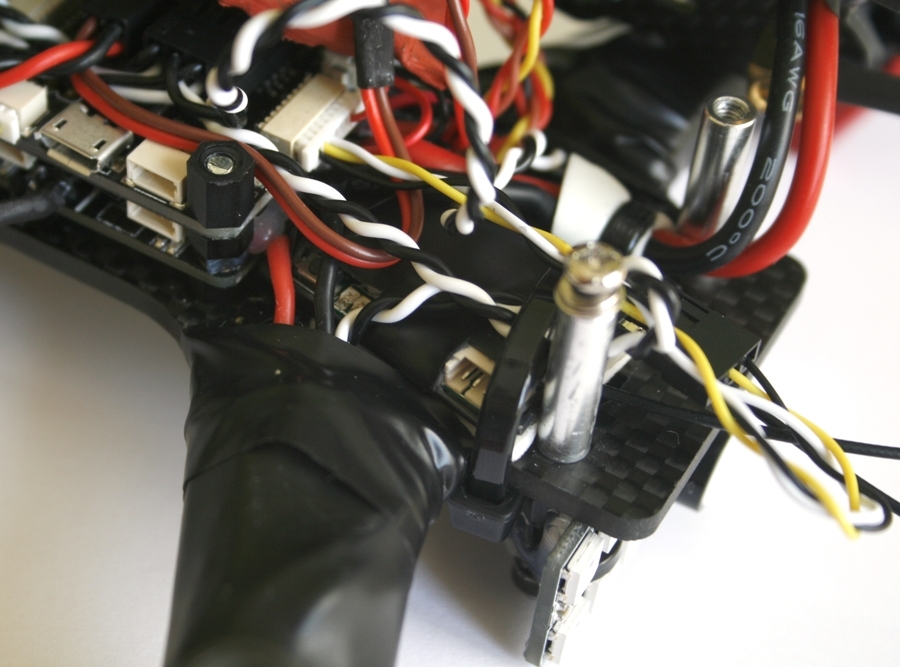
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
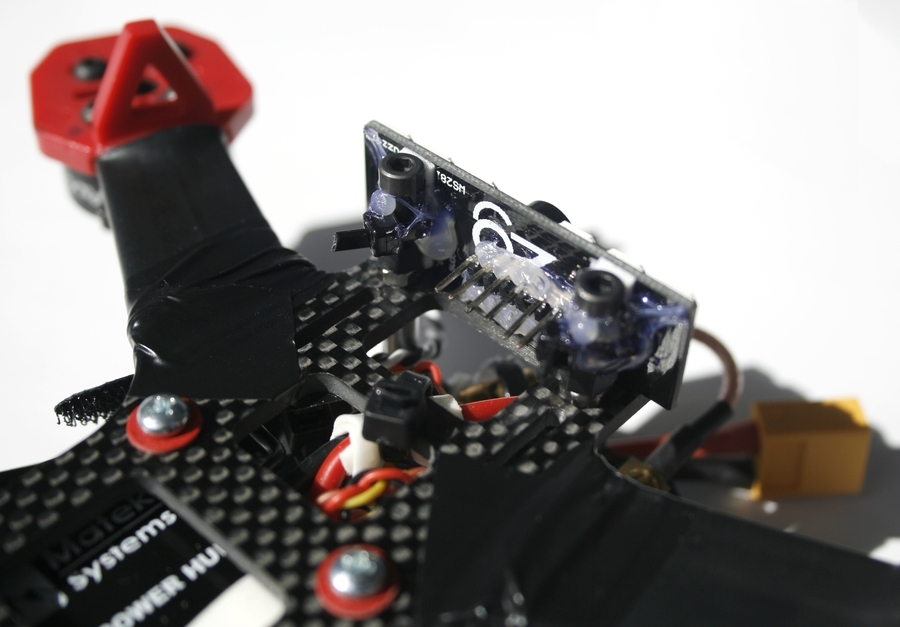
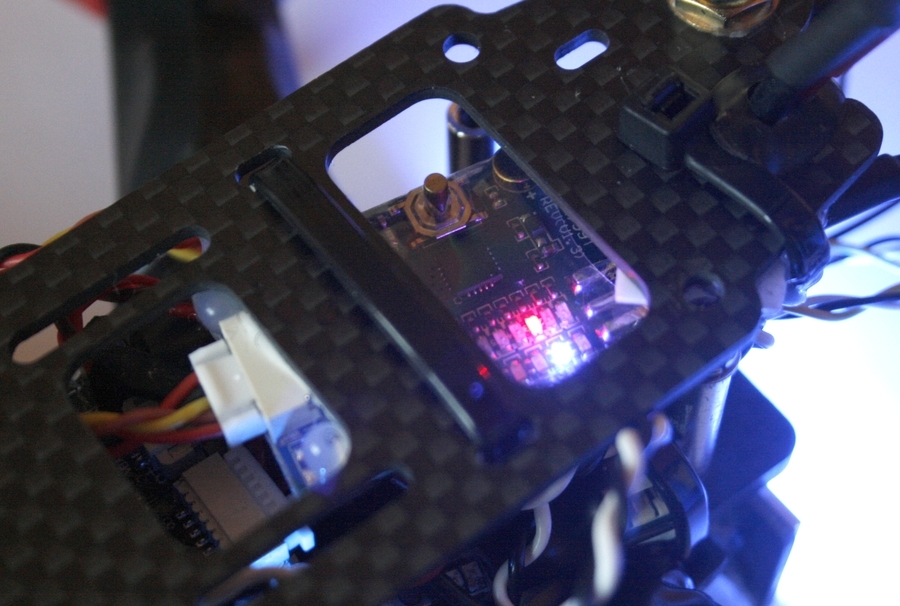
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Читайте также: