
Lego classroom ev3 уроки
Обновлено: 15.05.2024

Используйте блок «Рулевое управление» для управления приводной платформой.

Переместить объект
Запрограммируйте приводную базу таким образом, чтобы переместить и освободить кубоид.

Движение по кривой
Используйте блок «Рулевое управление» для управления приводной платформой.

Перемещение по прямой
Изучите различные способы управления движением приводной платформы по прямой линии.

Что дальше?
Используйте блок переключения для принятия решений в динамическом процессе на основании информации датчика.
Остались вопросы?
Свяжитесь с нами
Быстрые ссылки
LEGO, the LEGO logo, the Minifigure, DUPLO, the SPIKE logo, MINDSTORMS and the MINDSTORMS logo are trademarks and/or copyrights of the LEGO Group. ©2022 The LEGO Group. All rights reserved. Use of this site signifies your agreement to the terms of use.
Соберите Робота с коническими шестерёнками и заставьте его проехать ровно 1 метр.

План урока
1. Подготовка
- Ознакомьтесь с материалами для учащихся в приложении Education EV3 Classroom.
- Соберите информацию о подходах и методиках, используемых инженерами и физиками.
- Вам понадобятся: рулетка и маркеры.
- При необходимости используйте для планирования урока раздел приложения «Первые шаги». Это поможет познакомить учащихся с конструкторами LEGO ® MINDSTORMS ® Education EV3.
- Просмотрите видеоматериалы курса и используйте идеи из раздела Начало обсуждения ниже, чтобы вовлечь учеников в дискуссию по теме курса и урока.
- Разделите класс на пары.
3. Исследование (15 мин.)
- Каждая пара учеников должна построить Робота с коническими шестерёнками.
- Дайте детям время, чтобы испытать модель и убедиться, что она построена правильно и работает должным образом.
4. Объяснение (10 мин.)
- Каждая команда должна провести ряд экспериментов и записать их результаты.
- Убедитесь, что они могут подготовить собственные таблицы результатов испытаний.
- Усложните задачу: необходимо скорректировать программу и конструкцию робота так, чтобы он проехал ровно 100 см.
5. Дополнение (10 мин.)
- Учащиеся должны проанализировать, какие изменения привели к самой низкой погрешности.
- Попросите каждую команду кратко подвести итоги своих экспериментов.
- Не забудьте оставить время для уборки.
6. Оценка
- Дайте оценку работе каждого учащегося.
- Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Ни одна машина не идеальна. Инженеры прилагают все усилия, чтобы сделать их как можно точнее, но вероятность ошибки будет всегда. Хотя характеристики машины обычно просчитываются и моделируются, саму машину в любом случае необходимо испытывать в лаборатории. Производительность машины можно оптимизировать с помощью тестирования, оптимизации, использования метода проб и ошибок.

PLAY
Просмотрите видеоматериалы курса и обсудите, какие методики используют профессиональные инженеры. Задайте соответствующие вопросы, например следующие:
- Как инженеры разрабатывают новые машины?
- Какие эксперименты они могут провести, чтобы измерить производительность машины?
- Какие факторы определяют приемлемый процент ошибок и как определить, достаточно ли хороша производительность машины?
Советы по сборке
Инструкция по сборке
Проверка в действии
Поместите робота на твёрдую ровную поверхность и отметьте его исходное положение. Запустите программу и, как только робот остановится, отметьте его конечное положение. На экране отобразятся расчётные и фактические значения вращения мотора и расчётное пройденное расстояние (в см).
Проведение эксперимента
При проведении эксперимента напомните ученикам следующее.
- Расчетные и фактические значения вращения мотора и расчётное значение пройденного расстояния (в см) отобразятся на экране.
- Необходимо использовать рулетку для измерения фактически пройденного роботом расстояния.
Следует записать в таблицу результатов эксперимента его номер, расчетное и измеренное пройденное расстояние. Обязательно оставьте достаточно места для дополнительных столбцов для дальнейших расчётов.
Советы по программированию
Программа
Индивидуальный подход
Способы упростить задание
- Работайте вместе со своими учениками, чтобы помочь им проанализировать влияние скорости на погрешность.
Способы сделать задание ещё интереснее
- Объясните математический смысл средних значений (например, среднее арифметическое по сравнению с медианой, размах ряда чисел), которые можно использовать для оценки измерений с погрешностью.
- Предложите учащимся усовершенствовать конструкции роботов, чтобы повысить точность выполнения заданий.
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
- Задание выполнено частично.
- Задание выполнено полностью.
- Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся смогли определить, что в конструкции или программе робота вызывает неточности при движении.
- Учащиеся определили внешние факторы, которые повлияли на точность робота.
- Учащиеся успешно исправили недочёты (т. е. отклонение от желаемого результата), добавив изменения в конструкцию или программу робота.
Самостоятельная оценка
Попросите каждого ребёнка выбрать уровень, который, по его мнению, соответствует качеству его работы на занятии.
- Бронзовый. Я провел (-а) эксперименты, но не понял (-а), что в конструкции или программе робота вызывает неточности при движении.
- Серебряный. Мне потребовалась помощь, чтобы понять, что в конструкции или программе робота вызывает неточности при движении.
- Золотой. Я нашел (-а), что в конструкции или программе робота вызывает неточности при движении, и внес (-ла) изменения, которые повысили его точность.
- Платиновый. Я нашел (-а), что в конструкции или программе робота вызывает неточности при движении, и внес (-ла) изменения, которые повысили его точность. Также я определил (-а) внешние факторы, влияющие на точность работы робота.

Развитие языковых навыков
Для разностороннего развития языковых навыков предложите ученикам следующие задания.
- Сделать краткий доклад по результатам своих экспериментов с примерами из обычной жизни, иллюстрирующими случаи, когда точность имеет решающее значение.
- Подготовить презентацию о том, что они узнали, с объяснением результатов своих экспериментов.
Примечание. Для выполнения этого задания требуется дополнительное время.
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности.
Собираем модели роботележек с различной компоновкой микрокомпьютера и с разными вариантами крепления датчиков и захватов.

2. Модели без мотора: изучаем механизмы и механические передачи
Простые модели для изучения механизмов и механических передач.
3. Шагающие роботы
Простые модели для изучения темы «Шагающие механизмы».
4. Игры и соревнования
Модели и регламенты игр для проведения занятия в игровой форме.
5. Захваты
Здесь собраны варианты конструкций захватов для проведения занятий с перемещением объектов.
6. Манипуляторы
Здесь собраны модели манипуляторов для изменения положения объектов на поле и сборки башни.
7. Плакаты по робототехнике
Здесь найдете файлы для самостоятельной печати плакатов по робототехнике. Картинки представлены в хорошем разрешении.
Привет, Хабр! Мы уже рассказывали о платформе LEGO MINDSTORMS Education EV3. Основные задачи этой платформы — обучение на практических примерах, развитие навыков STEAM и формирование инженерного мышления. В ней можно проводить лабораторные работы по изучению механики и динамики. Лабораторные стенды из кубиков LEGO и утилиты по регистрации и обработке данных делают опыты еще интереснее и нагляднее и помогают детям лучше понять физику. Например, школьники могут собрать данные о температуре плавления и с помощью приложения систематизировать их и представить в виде графика. Но это только начало: сегодня мы расскажем, как дополнить этот набор средой программирования MicroPython и использовать его для обучения робототехнике.

Учим программированию с помощью EV3
Современные школьники хотят видеть красочный результат. Да, им скучно, если программа выводит в консоль числа, и они хотят рассматривать цветные графики, диаграммы и создавать настоящих роботов, движущихся и выполняющих команды. Обычный код тоже кажется детям слишком сложным, поэтому обучение лучше начинать с чего-нибудь полегче.
Базовая среда программирования EV3 создана на основе графического языка LabVIEW и позволяет задавать алгоритмы для робота визуально: команды представлены в виде блоков, которые можно перетаскивать и соединять.

Такой способ хорошо работает, когда нужно показать, как строятся алгоритмы, но он не подходит для программ с большим количеством блоков. При усложнении сценариев необходимо переходить на программирование с помощью кода, но детям трудно сделать этот шаг.
Здесь есть несколько хитростей, одна из которых — показать, что код выполняет те же задачи, что и блоки. В среде EV3 это можно сделать благодаря интеграции с MicroPython: дети создают одну и ту же программу в базовой среде программирования с помощью блоков и на языке Python в Visual Studio Code от Microsoft. Они видят, что оба способа работают одинаково, но кодом решать сложные задачи удобнее.
Переходим на MicroPython
Среда EV3 построена на базе процессора ARM9, и разработчики специально оставили архитектуру открытой. Это решение позволило накатывать альтернативные прошивки, одной из которых стал образ для работы с MicroPython. Он позволяет использовать Python для программирования EV3, что делает работу с набором еще ближе к задачам из реальной жизни.
Чтобы начать работать, нужно скачать образ EV3 MicroPython на любую microSD-карту, установить ее в микрокомпьютер EV3 и включить его. Затем нужно установить бесплатное расширение для Visual Studio. И можно приступить к работе.
Программируем первого робота на MycroPython

На нашем сайте есть несколько уроков для освоения базовых понятий робототехники. Модели на EV3 знакомят детей с азами, которые используются в самоуправляемых автомобилях, заводских роботах-сборщиках, станках с ЧПУ.
Мы возьмем для примера чертежную машину, которую можно научить рисовать узоры и геометрические фигуры. Данный кейс является упрощенным вариантом взрослых роботов-сварщиков или фрезеровщиков и показывает, как можно использовать EV3 совместно с MicroPython для обучения школьников. А еще чертежная машина может разметить отверстия в печатной плате для папы, но это уже другой уровень, требующий математических расчетов.
Для работы нам понадобятся:
- базовый набор LEGO MINDSTORMS Education EV3;
- большой лист клетчатой бумаги;
- цветные маркеры.
Сначала инициализируем библиотеку модулей EV3:
Настраиваем платформу, которая вращает ручку как мотор в порте B. Задаем передаточное отношение двухступенчатой зубчатой передачи с количеством зубьев 20-12-28 соответственно.
Настраиваем подъемный механизм для ручки как мотор в порте C:
Настраиваем гироскоп, измеряющий угол наклона ручки, в порте 2:
Настраиваем цветовой датчик в порте 3. Датчик используется, чтобы определять белую бумагу под чертежной машиной:
Настраиваем датчик касания в порте 4. Робот начинает рисовать, когда датчик нажат:
Определяем функции, которые поднимают и опускают ручку:
Определяем функцию для поворота ручки на заданный угол или до определенного угла:
Если целевой угол больше, чем текущий угол гироскопического датчика, продолжаем движение по часовой стрелке с положительной скоростью:
Если целевой угол меньше, чем текущий гироскопического датчика, то двигаемся против часовой стрелки:
Останавливаем вращающуюся платформу, когда целевой угол будет достигнут:
Устанавливаем начальное положение ручки в верхнем положении:
Теперь идет основная часть программы — бесконечный цикл. Сначала EV3 ожидает, когда датчик цвета обнаружит белую бумагу или синюю стартовую клетку, а датчик касания будет нажат. Затем он рисует узор, возвращается в исходное положение и повторяет все заново.
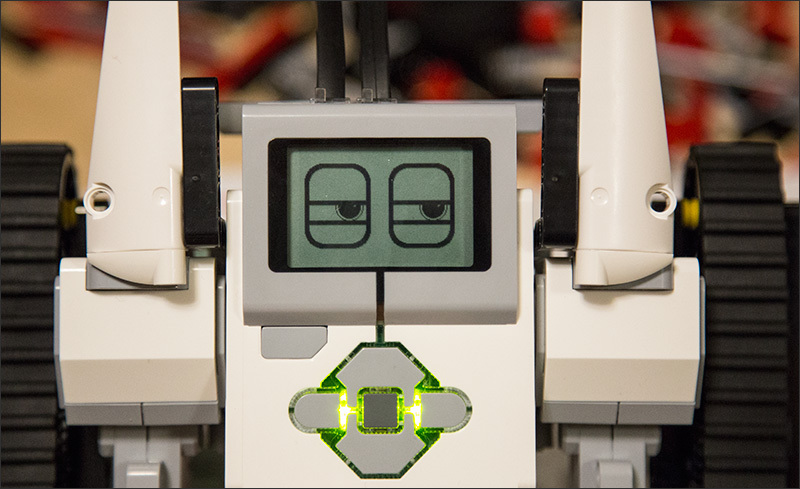
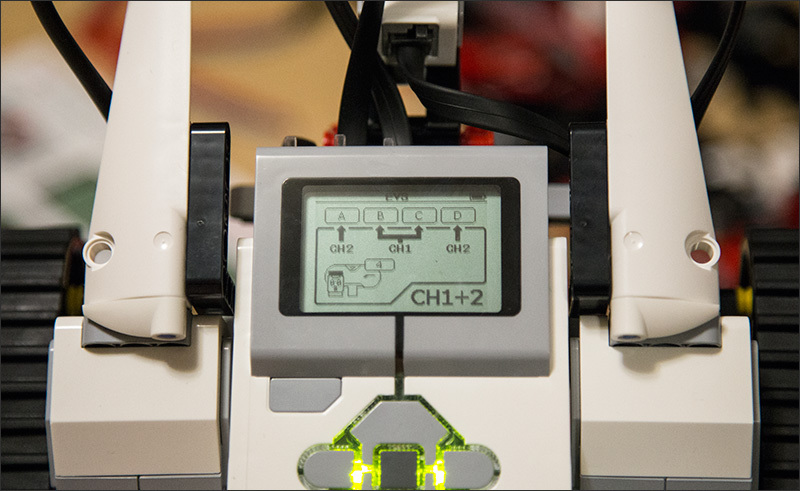
Когда устройство не готово, светодиоды на контроллере принимают красный цвет, и на ЖК-экране отображается изображение «палец вниз»:
Дожидаемся, когда датчик цвета считает синий или белый цвет, устанавливаем цвет светодиодов зеленым, отображаем на ЖК-экране изображение «палец вверх» и сообщаем, что устройство готово к работе:
Дожидаемся нажатия датчика касания, присваиваем гироскопическому датчику значение угла 0 и начинаем рисовать:
Поднимаем держатель ручки и возвращаем его в исходное положение:
Вот такая несложная программа у нас получилась. И теперь запускаем ее и смотрим на робота-чертежника в деле.
Что дают такие примеры

EV3 — это инструмент для профориентации в рамках профессий STEM и точка входа в инженерные специальности. Так как на нем можно решать практические задачи, дети получают опыт технических разработок и создания промышленных роботов, учатся моделировать реальные ситуации, понимать программы и анализировать алгоритмы, осваивают базовые конструкции программирования.
Поддержка MicroPython делает платформу EV3 подходящей для обучения в старших классах. Ученики могут попробовать себя в роли программистов на одном из самых популярных современных языков, познакомиться с профессиями, связанными с программированием и инженерным проектированием. Наборы EV3 показывают, что писать код — это не страшно, готовят к серьезным инженерным задачам и помогают сделать первый шаг к освоению технических специальностей. А для тех, кто работает в школе и связан с образованием, у нас подготовлены программы занятий и учебные материалы. В них детально расписано, какие навыки формируются при выполнении тех или иных задач, и как полученные навыки соотносятся со стандартами обучения.
Несмешной и баянистый анекдот, но нельзя просто так взять и начать эту публикацию не с него – он в лучшем виде отображает суть того, о чём пойдёт речь далее. Впрочем, из заголовка вы и так поняли, о чём речь.

Осторожно! Публикация может вызвать непреодолимое желание завести сына.
Урок истории
Компания LEGO (название произошло от датской фразы «leg godt», «Играй с удовольствием») не нуждается в представлении – она была основана в далёком 1932 году, хотя первые знакомые всем пластиковые кубики появились значительно позже, в 1947. Примечательно, что кубики LEGO, выпускаемые в те годы, полностью совместимы с теми, что выпускаются сейчас.
История создания компании, выпущенная компанией Pixar к 80-летнему юбилею LEGO:
Сейчас компания производит около 20 миллиардов деталек в год, то есть более 630 штук в секунду. В текущем модельном ряду более 600 различных конструкторов и так уж получилось, что серия Mindstorms является своего рода вершиной технической мысли, самым-самым навороченным конструктором. Если вкратце, то она позволяет делать вполне себе полноценных роботов.
Как гласит википедия, серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. Сегодня речь пойдёт о LEGO Mindstorms EV3 – последнем (третьем) поколении терминатора конструктора, который был представлен почти год назад, 4 января 2013 года (в продаже появился только спустя полгода).
Отличия EV3 от NXT 2.0
В принципе, главная идея осталась прежней – серия предназначена для сборки программируемых роботов. Поэтому первым встаёт вопрос, а что же поменялось с момента выхода предыдущего конструктора и стоит ли покупать новый? Основное отличие заключается в обновленных датчиках/моторах и, самое главное, в интеллектуальном блоке EV3 (EV означает EVolution):
| EV3 | NXT | |
| Дисплей | Монохромный LCD, 178x128 | Монохромный LCD, 100x64 |
| Процессор | 300 МГц Texas Instruments Sitara AM1808 (ARM9) | 48 МГц Atmel AT91SAM7S256 (ARM7TDMI) |
| Память | 64 Мб RAM 16 Мб Flash Слот microSDHC (до 32 Гб) | 64 Кб RAM 256 Кб Flash |
| USB-хост | Есть | Нет |
| Wi-Fi | Опционально, через USB-донгл | Нет |
| Bluetooth | Есть | Есть |
| Поддержка Apple-устройств | Есть | Нет |
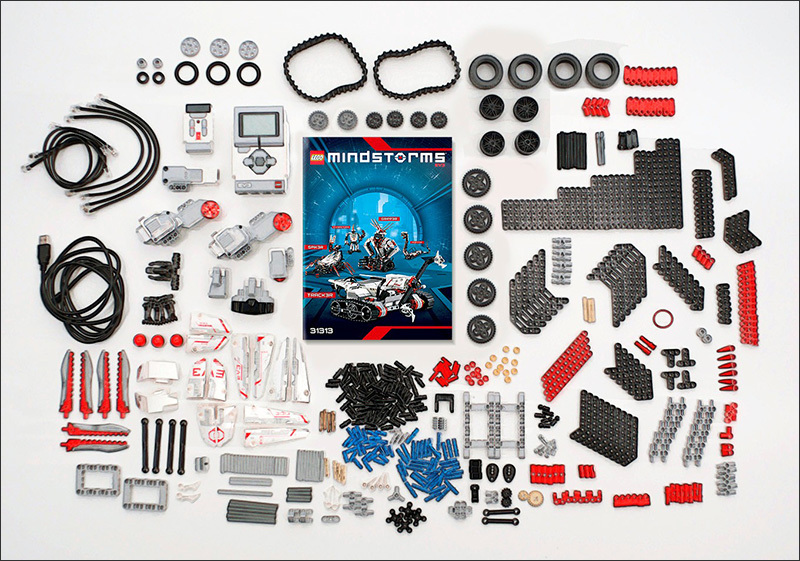
Ещё одно отличие заключается в том, что серия NXT продавалась в нескольких версиях (в разные годы) и представляла собой разные наборы, базовые и ресурсные. У нового EV3 с этим попроще – пока он продаётся в основном варианте – 31313 (601 деталь), из которого можно наделать кучу всего. Но при желании можно докупить базовый набор 45544 (541 деталь) с дополнительными сенсорами и детальками (использовать детали от обычных конструкторов также никто не мешает). Кстати, обратите внимание на пятизначные артикулы – на такую нумерацию компания перешла в 2013 году.
Что касается совместимости, то тут было проделано всё возможное. Все NXT-сенсоры и моторы совместимы с EV3 и распознаются как NXT. EV3-сенсоры не работают с NXT, но EV3-моторы вроде как совместимы. NXT-кирпичик может быть запрограммирован софтом от EV3, но некоторые функции могут быть недоступны, а вот запрограммировать EV3-кирпичик NXT-софтом без сторонних решений не получится.
Внутри коробки
Ещё когда я сам был маленький и ездил с родителями в центральный Детский Мир (когда он ещё был), на Лубянку – уже тогда я не мог оторвать глаз от коробок с LEGO. Тогда не было ни Гиктаймс, ни даже Хабра, но с тех пор коробки остались всё такими же яркими и сочными, даже во взрослом возрасте активируют процесс слюновыделения ) В этом плане другим производителям есть чему поучиться.

Часть коробки, на самом деле, представляет собой (если её разрезать) трассу с различными цветовыми зонами, которую можно использовать для роботов с сенсорами цвета.
Все детальки аккуратно разложены по пакетикам, в комплекте – инструкция и набор наклеек. Давайте вкратце пройдёмся по тому, что положили в комплект.

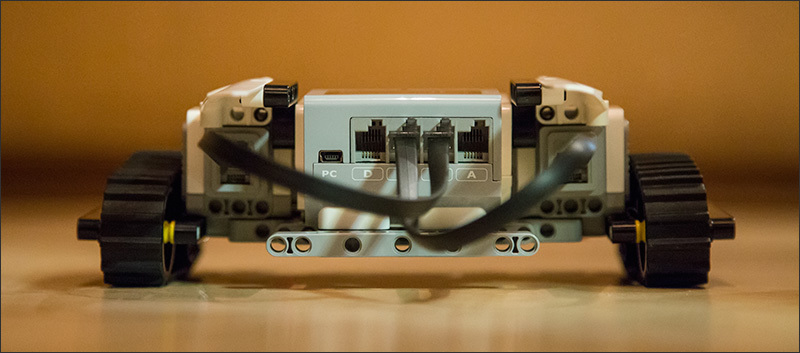
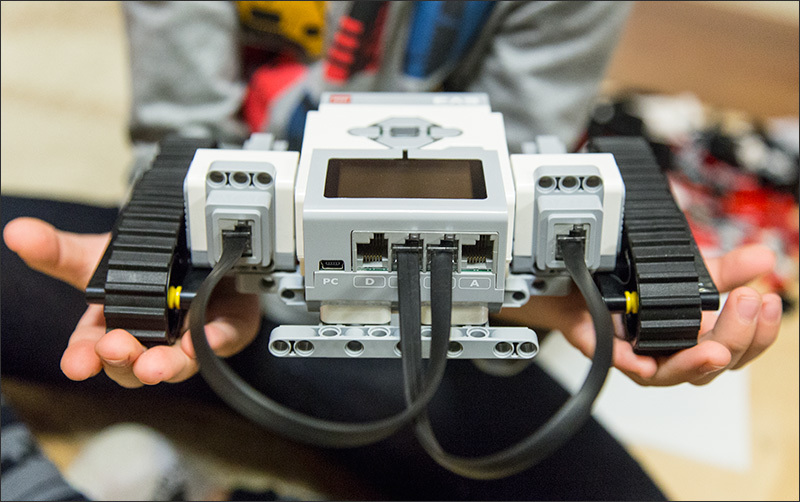
Сам EV3, он же интеллектуальный блок, он же сердце системы, он же «кирпичик» или «кубик». Служит центром управления и энергетической станцией для вашего робота и имеет следующие функциональные элементы:

– Многофункциональный монохромный дисплей с разрешением 178х128
– Шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы
– 4 порта ввода (1, 2, 3, 4) для подключения датчиков
– 4 порта вывода (A, B, C, D) для выполнения команд
– 1 разъём miniUSB для подключения EV3 к компьютеру
– 1 порт USB–хост (для соединения нескольких EV3 в одну цепь, например)
– 1 слот для карт памяти формата microSD (до 32Гб) – для увеличения объёма доступной памяти EV3
– Встроенный динамик



Кубик EV3 также поддерживает Bluetooth, WiFi (через USB-адаптер NETGEAR WNA1100 Wireless-N 150), для связи с компьютерами имеет программный интерфейс, позволяющий создавать программы и настраивать регистрации данных непосредственно на микрокомпьютере EV3.
» Большой EV3-сервомотор (2 штуки). Cоздан для работы с микрокомпьютером EV3 и имеет встроенный датчик вращения с точностью измерений до 1 градуса. Используя этот датчик, мотор может соединяться другими моторами, позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения может использоваться и при проведении различных экспериментов для точного считывания данных о расстоянии и скорости.

– Встроенный датчик вращения с точностью измерений до 1 град
– Максимальные обороты до 160-170 об/мин
– Максимальный крутящий момент в 40 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Средний EV3-сервомотор. Идеален для задач, когда скорость и быстрота отклика, а также размер робота важнее его грузоподъёмности.

– Встроенный датчик вращения с точностью измерений до 1 градуса
– Максимальные обороты до 240-250 об/мин
– Максимальный крутящий момент в 12 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Датчик цвета (EV3). Способен определить 8 различных цветов, хотя также может использоваться как датчик освещённости.

– Измеряет отраженный красный свет и внешнее рассеянное освещение, от полной темноты до яркого солнечного света
– Фиксирует и определяет 8 цветов
– Частота опроса до 1 кГц
– Автоматическая идентификация программным обеспечением EV3
» Датчик касания (EV3). Позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение. Также способен определить количество нажатий, как одиночных, так и множественных.
» Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.

– Измерения приближения/удаления в радиусе 50-70 см
– Радиус улавливания ИК-сигналов до 2 метров
– До 4 индивидуальных каналов приёма сигнала
– Получение удаленных ИК-команд управления
– Автоматическая идентификация программным обеспечением EV3
» Удалённый инфракрасный маяк. Разработан для использования с ИК-датчиком EV3. Маяк излучает ИК-сигнал, улавливаемый датчиком – может использоваться в качестве пульта дистанционного управления микрокомпьютера EV3, передавая сигналы на ИК-датчик.
– До 4 индивидуальных каналов передачи сигнала (переключатель прямо на корпусе)
– Имеет кнопку и тумблер для включения/выключения
– При работе ИК-маяка горит зелёный светодиод
– Автоматическое отключение при простое более 1 часа
– Радиус действия до 2 метров
В отдельном пакетике смотаны провода для подключения датчиков и моторов к кубику, а также USB-шнур для подключения кубика к компьютеру.

Стоит отметить два важных момента. Во-первых, существуют другие датчики Lego, такие как:
» Гироскопический датчик (EV3). Цифровой гироскопический датчик EV3 позволяет измерять движение вращения робота, а также улавливать изменения в его движении и положении. Режим измерения углов с точностью до ± 3 градуса; встроенный гироскоп улавливает вращения с моментом до 440 град/с; частота опроса до 1 кГц.
» Ультразвуковой датчик (EV3). Генерирует звуковые волны и фиксируюет их отражения от объектов, тем самым измеряя расстояние до объектов. Также может использоваться в режиме сонара, испуская одиночные волны. Может улавливать звуковые волны, которые будут являться триггерами для запуска программ. Измеряет расстояния в пределах от 1 до 250 см, а точность измерений составляет ± 1 см.
А во-вторых, поддерживаются сенсоры и прочие аксессуары от сторонних производителей, таких как HiTechnic и Mindsensors – они предлагают всевозможные джойстики, инфракрасные датчики расстояний, магнитные датчики, компасы, гироскопы, акселерометры, таймеры, мультиплексоры, шаровые опоры, и т.д. Так что, если задаться вопросом, можно найти много всего интересного.

В общем, как вы уже поняли, LEGO – это для реальных пацанов!
Первая модель
В комплекте с конструктором идёт бумажная инструкция, по которой можно собрать одну-единственную модель – некое подобие гусеничной самоходной машины.
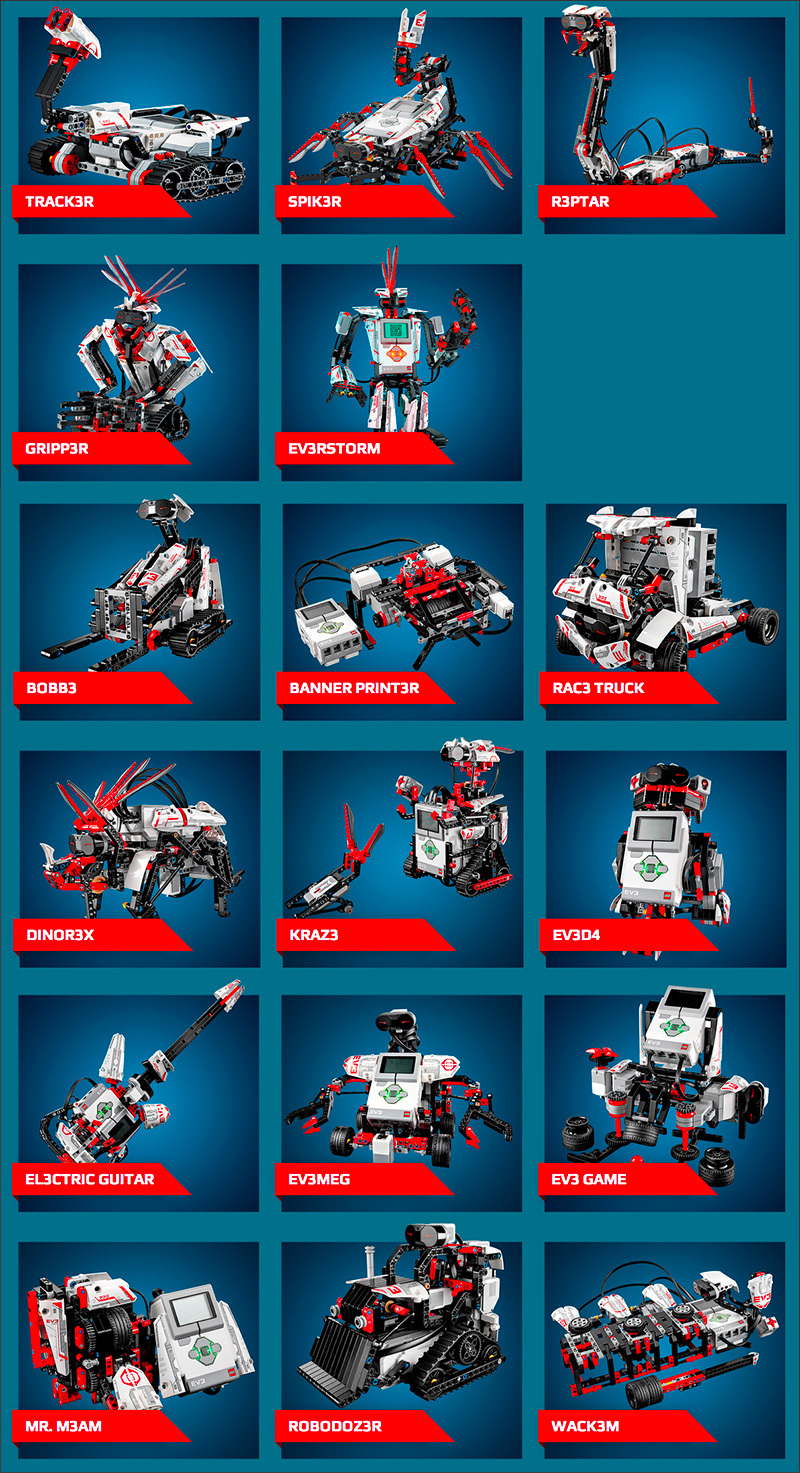
Сначала я удивился, ведь даже в самых простых наборах (серии типа LEGO Creator) всегда идёт несколько инструкций, а тут вдруг бумаги пожалели или места в коробке не нашли. Оказалось… что только на официальном сайте из набора деталей предлагается собрать 17 разных роботов! Поэтому 17 инструкций в коробке были бы действительно лишними (и для логистики, и для лесов природы). Вот названия роботов: EV3RSTORM, GRIPP3R, R3PTAR, SPIK3R, and TRACK3R. ROBODOZ3R, BANNER PRINT3R, EV3MEG, BOBB3, MR-B3AM, RAC3 TRUCK, KRAZ3, EV3D4, EL3CTRIC GUITAR, DINOR3X, WACK3M, и EV3GAME – инструкции для них придётся качать из инета, равно как и софт для подключения EV3 к компьютеру.
Инструкция наиподробнейшая, накосячить сложно. Сын сказал , что детали в пакетиках расфасованы не очень удачно – на первой же странице может потребоваться вскрыть 3 разных пакета, но это тоже мелочи.

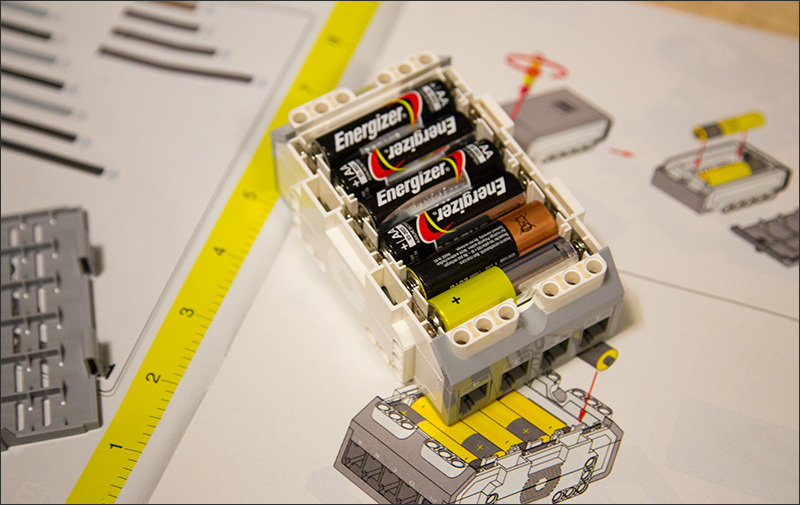
Кубик EV3 необходимо запитать, для чего можно использовать аккумулятор (нет в комплекте) или 6 пальчиковых батареек. Забегая вперёд – ещё 2 батарейки (но уже мизинчиковых) понадобятся для питания ИК-маяка (он же пульт ДУ).
Первую модель ребёнок (7 лет) собрал примерно минут за 30.
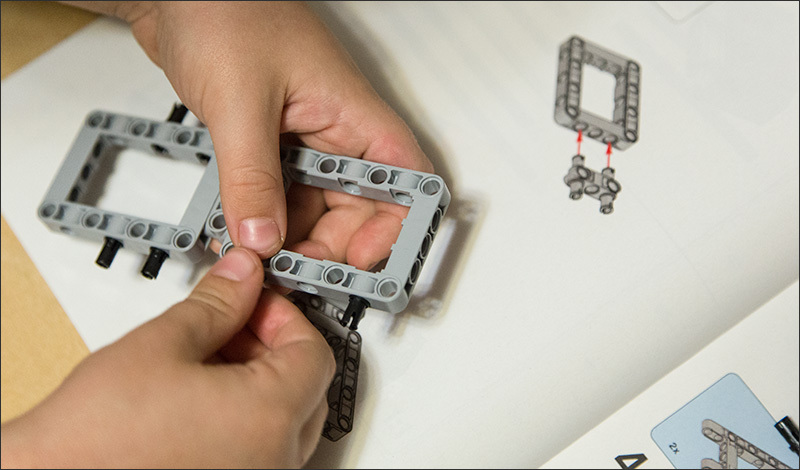
Процесс оказался не таким увлекательным, как, например, сборка моделей LEGO Technics – в инструкции предлагается собрать далеко не самого интересного робота: в нём лишь крупные детали, среди которых были практически все датчики и двигатели – видимо, чтобы продемонстрировать работу каждого из них.
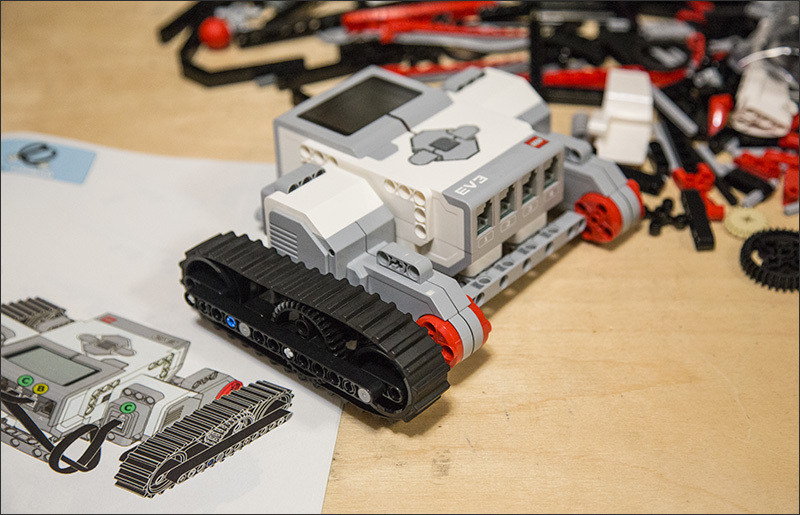
Но вот результат превзошёл все детские ожидания – впервые он собрал модель, которая могла двигаться сама: вперёд-назад, поворот, разворот на месте, крутила щупальцами…
Запуск осуществляется с кубика EV3, для чего следует нажать пару кнопок на лицевой панели. Некоторые действия можно запрограммировать прямо на кубике: выбрать количество итераций, настроить подачу звукового сигнала и так далее – в одной статье всего не рассказать, курите мануалы.
Программировать через компьютер собранную выше модель не пришлось. Тем не менее, возможность такая есть, при этом на разных уровнях хардкорности.
Ребёнку проще всего будет начать с предлагаемого производителем софта, который есть как под Windows, так и под OS X. Во втором случае дистрибутив весит 666 Мб, а установленное приложение займёт гигабайт. Оно называется LEGO Mindstorms EV3 Home Edition и разработано совместно с небезызвестной компанией LabView. На сайте LEGO довольно много обучающих программированию материалов.
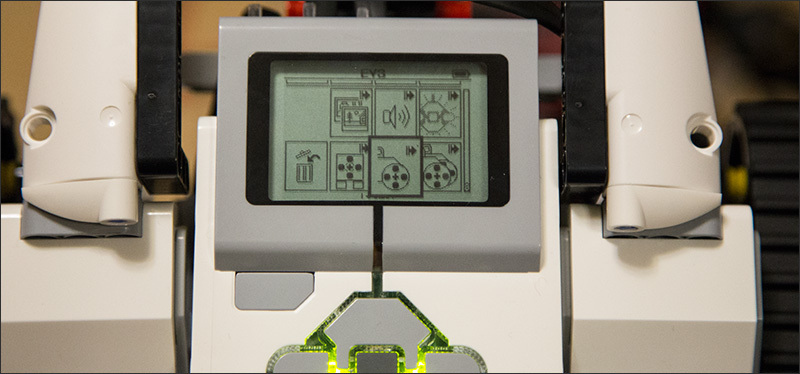
Сразу после запуска перед нами возникает интерактивный «гараж» из роботов, которых можно собрать из набора:
Выбираем понравившегося и начинаем собирать: перед нами появится интерактивная инструкция по сборке, видеоролики, а также подборка различных миссий, которые можно выполнить с собранным роботом. Вот почему дистрибутив весил так много.
Не вижу смысла описывать всё в деталях: вы быстрее скачаете приложение сами и увидите, что там есть и на каком уровне. Разве что упомяну один из недостатков, который мне больше всего запомнился: не самый дружелюбный (особенно для детей) интерфейс – от приложения попахивает каким–то банк-клиентом.
Нельзя ещё раз не отметить, что кубиком EV3 можно управлять со смартфона на операционных системах Android или iOS, для чего есть отдельные приложения.
Если всего этого оказалось мало, можете повысить градус хардкора. Для кубика EV3 существуют различные прошивки, которые позволяют расширить его возможности, скорость работы и т.д. Вот, например, альтернативная прошивка leJOS EV3 – прошивка с jvm, позволяющая программировать EV3 на языке Java. Хотите на другом языке? Окей, гугл – в вашем распоряжении почти 60 вариантов на выбор: ASM/C/C++/Perl/Python/Ruby/VB/Haskell/Lisp/Matlab/LabVIEW и многое-многое другое.
Более подробно об этом я рассказывать не буду по нескольким причинам: во-первых, программист из меня полный false (все надежды на сына), во-вторых, пока мы успели собрать только одну модель (и на выходных возьмёмся за вторую), а в-третьих – вы уже и так оформили заказ на этот конструктор и скоро сами всё узнаете ;) Ну а если серьёзно, то статья и так уже огромная – вот лучше две ссылочки изучите: раз и два.
Ну и ещё большой плюс – это LEGO-сообщества, которых полно по всему миру. Можете быть уверены, что на любом из этапов экспериментов с роботами вы всегда сможете найти единомышленников и тех, кто сможет помочь с решением проблемы. Помимо дружелюбных сообществ, на просторах сети выложено огромное множество различных инструкций, моделей, исходников, видеороликов и обучающих материалов. Всё это означает одно: с Mindstorms вы не соскучитесь.
Читайте также: