
Лего майндстормс движение по черной линии
Обновлено: 01.05.2024
Рассмотрим простейший алгоритм движения по черной линии на одном датчике цвета на EV3.
Данный алгоритм является самым медленным, но самым стабильным.
Робот будет двигаться не строго по черной линии, а по ее границе, подворачивая то влево, то вправо и постепенно перемещаясь вперед.
Алгоритм очень простой: если датчик видит черный цвет, то робот поворачивает в одну сторону, если белый — в другую.
Реализация в среде Lego Mindstorms EV3
В обоих блоках движения выбираем режим «включить». Переключатель настраиваем на датчик цвета — измерение — цвет. В нижней части не забудьте изменить «нет цвета» на белый.
Также, необходимо правильно указать все порты.
Не забудьте добавить цикл, без него робот никуда не поедет.
Проверьте. Для достижения лучшего результата попробуйте изменить значения рулевого управления и мощности.
Алгоритм:
Действие алгоритма основано на том, что в зависимости от степени перекрытия, пучка подсветки датчика чёрной линией, возвращаемые датчиком показания градиентно варьируются. Робот сохраняет положение датчика света на границе чёрной линии. Преобразовывая входные данные от датчика света, система управления формирует значение скорости поворота робота.
Так как на реальной траектории датчик формирует значения во всём своём рабочем диапазоне (0-100), то значением к которому стремиться робот, выбрано 50. В этом случае значения передаваемые функции поворота формируются в диапазоне -50 - 50, но этих значений недостаточно для крутого поворота траектории. По этому следует расширить диапазон в полтора раза до -75 - 75
Более устойчиво алгоритм работает, если использовать моторы с управлением скоростью –100. 100.
В этом случае есть возможность отрегулировать плавность поворота в соответствии с кривизной линии
Так как на реальной траектории датчик формирует значения во всём своём рабочем диапазоне (0-100), то значением к которому стремиться робот, выбрано 50. В этом случае значения передаваемые функции поворота формируются в диапазоне -50 - 50, но этих значений недостаточно для крутого поворота траектории. По этому следует расширить диапазон в полтора раза до -75 - 75
На данном уроке мы разберем движение робота Ev3 вдоль черной линии.
Напишем программу для движения робота по черной линии для Lego Ev3. Познакомимся с логическими операциями Ev3.
Для того, чтобы робот Ev3 двигался постоянно вдоль черной линии в программе используется бесконечный цикл в нем происходит считывание данных с датчиков цвета, освещенности, анализ данных датчиков и сооствесвующие маневры робота. В нашем роботе левый датчик цвета подключен к порту 3, правый датчик подсоединен к порту 1. Левый мотор подключен к порту В, правый мотор к порту А.
На рисунке показан блок считывания данных с датчика освещенности.

Если значение меньше 5 (знак сравнения 4) , то значит датчиком мы заехали на черную линию.
Если значение больше 5 (знак сравнения 2), то заехали на белое поле
Алгоритм движения по черной линии для робота с двумя датчиками следующий.
Если робот заехал левым датчиком на черную линию, то робот сворачивает (съезжает с линии) налево. Если робот заехал правым датчиком на черную линию, то поворачивает направо. Если обоими датчиками видит белое поле, то робот едет вперёд. Если обоими датчиками он видит чёрную линию, то это перекрёсток, он едет вперёд и съезжает с перекрестка.
Чтобы обрабатывать одновременно данные с нескольких датчиков, необходимо использовать логические операции. Для того чтобы выполнялись оба условия, используется логическая операция И.

Напишем программу для движения вдоль черной линии для робота Ev3.
У нашего робота левый датчик освещенности подключен к порту 3, правый датчик освещенности подключен к порту 1.
1 действие. Считываем данные с датчиков освещенности заходим в яркость, отраженного света Записываем их в логический блок И ( Красный блок)

2 действие. Соединяем логический блок с переключателем, который выставлен в логическое значение.


3 действие. В условие ставим поворот налево. Смотри урок 1 Повороты Ev3

4 Действие. Повторяем считывание датчиков освещенности и логический блок
Значение датчика освещенности 1 становится меньше 5, а датчика с портом 3 больше 5. В этом случае чёрную линию видит правый датчик. Поворот делается направо, поэтому правый мотор (порт А) вращается назад , мощность со знаком минус , а левый мотор (порт B) вращается вперед. Осуществляется поврот направо. В цикле движения выставите не очень большое время порядка 0,1 секунды, чтобы робот реагировал быстрее на изменение траектории.


5 действие. Если оба датчика освещенности фиксируют белое поле, то робот движется вперед. Опять считываем данные с обоих датчиков. Ставим в считывании датчиков знак больше, мощность обоих моторов положительная.

6 действие. Если оба датчика освещенности фиксируют чёрную линию, то движемся вперёд. Считывание датчиков, для обоих датчиков ставим меньше 5, для обоих моторов выставляем движение вперед

Для изменения скорости движения по черной линии необходимо поменять мощность моторов при дивжении вперед. Если траектория будет слишком крута и робот будет слетать с черной линии, необходимо уменьшить мощность при движении вперед и увеличить мощность при поворотах.
3D-Cocoon придёт на смену Wii » роботы для связи и общения
На этом уроке мы напишем программу для движения робота ev3 по черной линии с одним датчиком. Движение по черной линии используется на различных соревнованиях, таких как шортрек, евролинии, траектория и других. Мы познакомимся с различными алгоритмами движения по черной линии
Алгоритм движения робота вдоль черной линии с одним датчиком.
В конструкции робота впереди по центру устанавливается датчик освещенности. Робот будет двигаться следующим образом. Если он датчиком заезжает на черную линию, то сворачивает с нее одним мотором, если он датчиком не видит линию, то он сворачивает другим мотором на линию. Робот будет двигаться зигзагами вдоль черной линии
Программа для робота ev3 движение по черной линии с одним датчиком
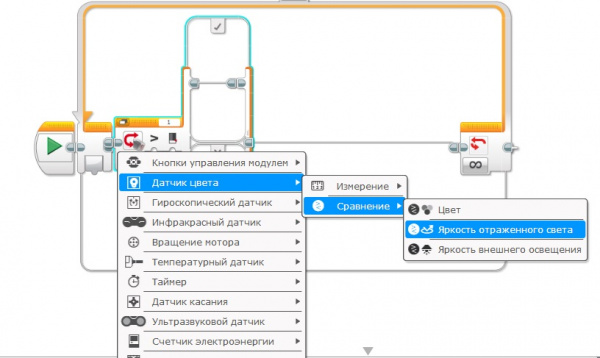
Программа будет осуществляться бесконечно ,пока мы не выключим робота. Для этого используем бесконечный цикл. В бесконечный цикл, ставим переключатель, в переключателе выбираем датчик цвета, режим сравнение, яркость отраженного цвета.
В переключателе организовываем движение робота ev3 в циклах один мотор останавливаем, другой мотор включаем в режиме включить. Циклы работают определённое время. Чтобы робот не слетел, желательно время циклов выставлять небольшим.
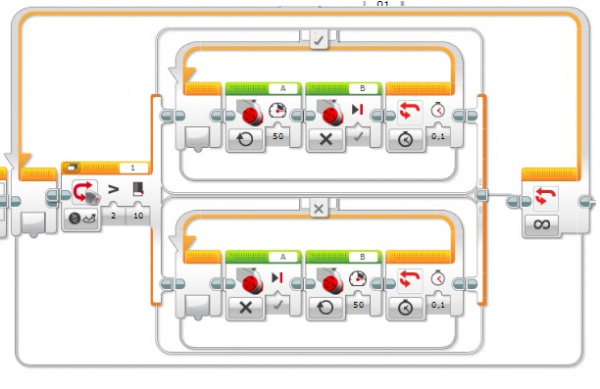
Когда запускаем движение робота по черной линии, выставляем датчик цвета на линию. Чтобы регулировать скорость движения, меняем мощность моторов. Более надежное движение робота по черной линии реализуется с помощью двух датчиков цвета. Подробнее об алгоритме движения робота по черной линии с двумя датчиками
-
Исследователь » робот из lego nxt 2.0
На этом уроке мы напишем программу для движения робота ev3 по черной линии с одним датчиком. Движение по черной линии используется на различных соревнованиях, таких как шортрек, евролинии, траектория и других. Мы познакомимся с различными алгоритмами движения по черной линии
Алгоритм движения робота вдоль черной линии с одним датчиком.
В конструкции робота впереди по центру устанавливается датчик освещенности. Робот будет двигаться следующим образом. Если он датчиком заезжает на черную линию, то сворачивает с нее одним мотором, если он датчиком не видит линию, то он сворачивает другим мотором на линию. Робот будет двигаться зигзагами вдоль черной линии
Программа для робота ev3 движение по черной линии с одним датчиком

Программа будет осуществляться бесконечно ,пока мы не выключим робота. Для этого используем бесконечный цикл. В бесконечный цикл, ставим переключатель, в переключателе выбираем датчик цвета, режим сравнение, яркость отраженного цвета.
В переключателе организовываем движение робота ev3 в циклах один мотор останавливаем, другой мотор включаем в режиме включить. Циклы работают определённое время. Чтобы робот не слетел, желательно время циклов выставлять небольшим.

Когда запускаем движение робота по черной линии, выставляем датчик цвета на линию. Чтобы регулировать скорость движения, меняем мощность моторов. Более надежное движение робота по черной линии реализуется с помощью двух датчиков цвета. Подробнее об алгоритме движения робота по черной линии с двумя датчиками
Вернуться к содержанию Перейти к уроку Движение по черной линии с двумя датчиками
На данном уроке мы разберем движение робота Ev3 вдоль черной линии.
Напишем программу для движения робота по черной линии для Lego Ev3. Познакомимся с логическими операциями Ev3.
Для того, чтобы робот Ev3 двигался постоянно вдоль черной линии в программе используется бесконечный цикл в нем происходит считывание данных с датчиков цвета, освещенности, анализ данных датчиков и соответсвующие маневры робота. В нашем роботе левый датчик цвета подключен к порту 3, правый датчик подсоединен к порту 1. Левый мотор подключен к порту В, правый мотор к порту А.
На рисунке показан блок считывания данных с датчика освещенности.

Если значение меньше 5 (знак сравнения 4) , то значит датчиком мы заехали на черную линию.
Если значение больше 5 (знак сравнения 2), то заехали на белое поле
Алгоритм движения по черной линии для робота с двумя датчиками следующий.
Если робот заехал левым датчиком на черную линию, то робот сворачивает (съезжает с линии) налево. Если робот заехал правым датчиком на черную линию, то поворачивает направо. Если обоими датчиками видит белое поле, то робот едет вперёд. Если обоими датчиками он видит чёрную линию, то это перекрёсток, он едет вперёд и съезжает с перекрестка.
Чтобы обрабатывать одновременно данные с нескольких датчиков, необходимо использовать логические операции. Для того чтобы выполнялись оба условия, используется логическая операция И.

Напишем программу для движения вдоль черной линии для робота Ev3.
У нашего робота левый датчик освещенности подключен к порту 3, правый датчик освещенности подключен к порту 1.
1 действие. Считываем данные с датчиков освещенности заходим в яркость, отраженного света Записываем их в логический блок И ( Красный блок)

2 действие. Соединяем логический блок с переключателем, который выставлен в логическое значение.


3 действие. В условие ставим поворот налево. Смотри урок 1 Повороты Ev3

4 Действие. Повторяем считывание датчиков освещенности и логический блок
Значение датчика освещенности 1 становится меньше 5, а датчика с портом 3 больше 5. В этом случае чёрную линию видит правый датчик. Поворот делается направо, поэтому правый мотор (порт А) вращается назад , мощность со знаком минус, а левый мотор (порт B) вращается вперед. Осуществляется поворот направо. В цикле движения выставите не очень большое время порядка 0,1 секунды, чтобы робот реагировал быстрее на изменение траектории.


5 действие. Если оба датчика освещенности фиксируют белое поле, то робот движется вперед. Опять считываем данные с обоих датчиков. Ставим в считывании датчиков знак больше, мощность обоих моторов положительная.

6 действие. . Если оба датчика освещенности фиксируют чёрную линию, то движемся вперёд. Считывание датчиков, для обоих датчиков ставим меньше 5, для обоих моторов выставляем движение вперед

Для изменения скорости движения по черной линии необходимо поменять мощность моторов при движении вперед. Если траектория будет слишком крута и робот будет слетать с черной линии, необходимо уменьшить мощность при движении вперед и увеличить мощность при поворотах.
Вернуться к содержанию Перейти к уроку Движение по линии до перекрестка
Читайте также: