
Lego mindstorms firmware nxt
Обновлено: 19.04.2024
How can we Check and Update the NXT Computer Brick's Firmware?
"Firmware" is the "operating system software" that goes inside your LEGO Computer Brick to enable it to function. Your computer brick will come with a version of this software pre-installed. Periodically, maybe once or twice a year, LEGO releases improved versions of firmware for your LEGO computer brick. It is worth checking before the start of each school term, if the version you are using is the current one.
What version of firmware does my LEGO computer brick use now?
Start up your LEGO MindStorms software; click on the top "Go" button, click on the "Tools" menu, select the "Update NXT Firmware. " option; and you will see at least one "LEGO_MINDSTORMS_NXT_Firmware_V1.xx" where "xx" are two numbers. In my case, I can see LEGO_MINDSTORMS_NXT_Firmware_V1.29.
What is the latest firmware version offered by LEGO for download?
You can find out which is the latest version of firmware offered by LEGO by clicking here. At the time of writing this paragraph (September 2011) the latest version available for download to my computer was "Firmware 1.31". Thus, my firmware version was out of date. This is probably not serious, my old programs will continue to run OK, but I may have some problems if I purchase some of the more modern LEGO peripherals. Since I use several of the more recently released sensors, it is probably best for me to update my computer brick's firmware.
Updating my LEGO Firmware

My next step was to download version 1.31 of the LEGO firmware, and to install it in my computer brick. Since updating involves placing a file in your operating system, you may like to get your school technician to do this for you. If you are at home, you can follow the procedure below which is quite safe if you are careful. This whole process is illustrated in the videos below; note that the videos can be expanded to a full screen by clicking on or in the lower right-hand corner of the movie screens: The usual rule applies, always make sure you have a backup before you start.
or movie(wmv), movie(mp4)
You can see from the videos above that I now have the latest LEGO firmware version (1.31) available for my use - and if there is any problem with the new version, I can still fall back to using my previous version of LEGO's firmware (1.29). Having both now available, I end up with the best of both worlds.
Robotics Tutorials Tasmania | About | Website Updates | Contact | Employees | FAQ | Information Links Challenges | Site Map
Copyright © 2008 Dr.Graeme Faulkner. All Rights Reserved. LEGO ® is a trademark of the LEGO Group, which does not sponsor, authorise or endorse this web site.

Lego Mindstorms EV3 [31313]
(третье поколение - 2013 г.)
домашняя версия
Официальный портал Lego
Техническое описание модуля EV3:
Операционная система — LINUX
Контроллер - ARM9 300 МГц
Флэш-память — 16 МБ
Оперативная память — 64 МБ
Разрешение экрана модуля — 178x128/черно-белый
Связь с главным ПК через шину USB 2.0 — до 480 Мбит/с
Связь с главным ПК через шину USB 1.1 — до 12 Мбит/с
Карта памяти Micro SD — поддерживает SDHC, версия 2.0, макс. 32 ГБ
Порты мотора и датчика
Коннекторы — RJ12 (со смещенным фиксатором)
Поддержка автоматической идентификации
Питание — 6 батарей типа AA
Поддержка Bluetooth - есть
Поддержка Wi-Fi - есть (модуль приобретается отдельно)
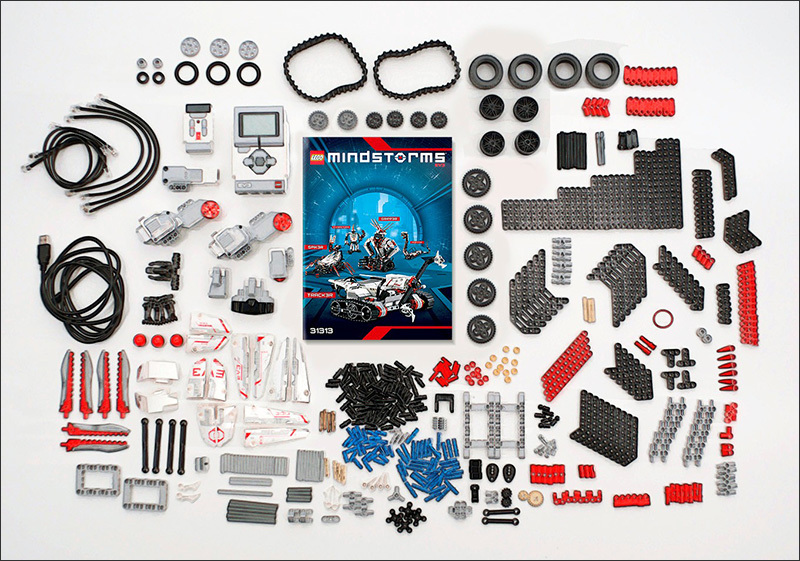
Внешний вид упаковки и деталей набора:







SPIK3R инструкция сайт

R3PTAR инструкция сайт

GRIPP3R инструкция сайт

EV3RSTORM инструкция оф. сайт

TRACK3R инструкция сайт

BOBB3E инструкция сайт

BANNER PRINT3R инструкция сайт

RAC3 TRUCK инструкция сайт

DINOR3X инструкция сайт

KRAZ3 инструкция сайт

EV3D4 инструкция сайт

EL3CTRIC GUITAR инструкция сайт

EV3MEG инструкция сайт

MR. B3AM инструкция сайт

ROBODOZ3R инструкция сайт

WACK3M инструкция сайт

Lego Education EV3 [45544], [45560]
(третье поколение - 2013 г.)
образовательная версия
Техническое описание модуля EV3:
Операционная система — LINUX
Контроллер - ARM9 300 МГц
Флэш-память — 16 МБ
Оперативная память — 64 МБ
Разрешение экрана модуля — 178x128/черно-белый
Связь с главным ПК через шину USB 2.0 — до 480 Мбит/с
Связь с главным ПК через шину USB 1.1 — до 12 Мбит/с
Карта памяти Micro SD — поддерживает SDHC, версия 2.0, макс. 32 ГБ
Порты мотора и датчика
Коннекторы — RJ12 (со смещенным фиксатором)
Поддержка автоматической идентификации
Питание — 6 батарей типа AA
Поддержка Bluetooth - есть
Поддержка Wi-Fi - есть (модуль приобретается отдельно)
Внешний вид упаковки и деталей наборов:


Основной набор Lego Education 45544 - 541 шт. скачать pdf


Ресурсный набор Lego Education 45560 - 853 шт. скачать pdf








Гоночная машина формула 1 | Видео | Инструкция и описание

Мойщик пола | Инструкция, демократ программа и видео


Приводная платформа на гусеничном ходу | Автор: Алексей Валуев | Видео | Инструкция и описание

Валли (WALL-E) | Автор: Алексей Валуев | Видео - 1, 2, 3 | Инструкция и описание

Часы со стрелками | Автор: Алексей Валуев | Видео | Инструкция и описание

Ice's Giant | Автор: Ice Yam | Видео | Описание | Демопрограмма | Инструкция | Сайт

Riley Rover | Автор: Damien Kee | Инструкция | Сайт


BT-R3MOTE | Автор: Dimitri Dekyvere | Видео - 1 и 2 | Инструкция (файл LDD) | Сайт

EduTankBot | Автор: Dimitri Dekyvere | Видео | Инструкция (файл LDD) | Сайт


Гимнаст | Видео | Инструкция









Build and Program Your Own LEGO Robots By Marziah Karch

Exploring LEGO Mindstorms. Eun Jung (EJ) Park

LEGO MINDSTORMS EV3 Discovery Book. Laurens Valk

LEGO Mindstorms EV3 Laboratory. Daniele Benedettelli

The Art of LEGO Mindstorms EV3 Programming. Terry Griffin

Beginning LEGO MINDSTORMS EV3

The LEGO Technic Idea Book Simple Machines

Thе LЕGО MINDSTОRMS ЕV3 Idеа Bооk

Технология и физика. Книга для учителя

Технология и физика. Книга для учителя

Doug Stillinger - Lego Crazy Action Contraptions - 2008

Lego Technic. Tora no Maki


Официальные инструкции Lego Technic за 1970-2015

Любительские инструкции Lego Technic
Занимательная робототехника
NiNoXT
Технический форум по робототехнике
Lego Engineering
NXT STEP Blog
Lego Mindstorms Robots
Lego Mindstorms NXT
(второе поколение - 2008 г.)
Техническое описание модуля модуля:
FAQ на phantoms.su
Обзор набора
Комплектация набора
Видео по ремонту дисплея модуля
Wi-Fi модуль
Подборка книг для NXT
Подборка инструкций к NXT, NXT 2.0
Lego Mindstorms RXT
(первое поколение - 1998 г.)
Техническое описание модуля:
Сыну 9-летнему заказал на ДР (и себе тоже :) ), "домашнюю" версию. Теперь вот голову ломаю чем его питать - батарейки жрет ведь безбожно, а фирменный аккум 5тыр стоит у нас.
А для чего эта приставка нужна??
Игры аля 90-е можно и на планшете поиграть. Там есть эмулятор Денди, Сега, Nintendo, Sony PS1
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.

Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.

Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.

Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.

Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках

Рисунок 4 — Окно Connections

Рисунок 5 — Окно Data Connections

Рисунок 6 — Законченный вид диаграммы

2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.

Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,

Лет эдак в 10-11, после долгих и беззаботных лет игры с контрукторами Lego, я узнал о существовании великолепного набора Mindstorms, который позволял создавать самых настоящих роботов без специализованных знаний электроники, электротехники и даже программирования. Я сразу же заинтересовался данной серией, но тогда моим мечтам обладать Mindstorms по различным (в основном — финансовым) причинам не суждено было сбыться.
Сейчас мне 20 и в честь юбилея друзья (спасибо им!) решили окунуть меня назад в детство и таки дать возможность полепить собственных роботов. Правда, в этот раз всё будет серьёзнее, чем в моих детских мыслях — мы будем действительно программировать Mindstorms под Debian GNU/Linux.
Неплохо, да?
Собственно, данный робот и будет нашей основной тестовой моделью. Но мы попробуем немного усовершенствовать его навыки. И для этого мы напишем небольшой кусочек кода.
Действительно. Идущее в комплекте ПО работает только в Windows и Mac OS. А у нас, внезапно, Debian Squeeze. К счастью, Mindstorms обладает огромным сообществом фанатов, которые придумали решение данной проблемы — использование альтернативного ПО для программирования роботов, в частности Bricxcc (здесь выложен полнейший мануал по настройке всего и вся).
А теперь немного теории — в программировании Mindstorms, как правило, помимо визуального среды ROBOLAB для Windows и Mac OS используется язык RCX, однако среди фанатов одним из наиболее популярных языков является достаточно простой NXC (Not eXactly C). Простая программа на NXC выглядит примерно так:
- task music()
- int lastTone=5000;
- while ( true )
- int tone= Random (5000)+500;
- int duration= Random (500);
- PlayTone(tone,duration);
- Wait(duration);
- >
- >
- task main()
- start music;
- while ( true )
- /* Determine Next Action */
- unsigned int duration= Random (5000);
- unsigned int motorSpeed= Random (100);
- unsigned int syncMode= Random (3);
- /* Display Next Action */
- ClearScreen();
- NumOut(0,LCD_LINE1,duration);
- NumOut(0,LCD_LINE2,motorSpeed);
- NumOut(0,LCD_LINE3,syncMode);
- /* Perform Next Action */
- switch (syncMode)
- case 0:
- OnFwdReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 1:
- OnRevReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 2:
- OnFwdSync(OUT_AC,motorSpeed,-100);
- break ;
- case 3:
- OnRevSync(OUT_AC,motorSpeed,-100);
- break ;
- >
- Wait(duration);
- >
- >
Для справки — данная программа заставляет «танцевать» нашего робота под нечто, напоминающее музыку.
Не буду спорить, программа совсем не сложна для понимания, но достаточно громоздка. И её можно заметно упросить, используя вместо написания кода на NXC специальный конвертер PyNXC. Иначе говоря, мы будем писать код на Python'е, а PyNXC будет преобразовывать его в NXC-код и загружать на устройство, избавив нас от необходимости писать громоздкий код на подобии Си.
Ну, а теперь, собственно, напишем на Python'е программу для путешествия нашего робота среди прозрачных чашек, но используя более грамотный алгоритм разворота:
Теперь наш робот научился разворачиваться на месте и, как только мешающий объект пропадет с поля его зрения, продолжать движение вперед.
Как вы уже, наверное, заметили, программировать Mindstorms очень просто. Стоит также сказать, что помимо NXC и Python с использованием PyNXC, можно писать код на Java, Lua, Ruby, Ассемблере, а также, что логично, использовать ассемблерные вставки в других языках.
Благодаря всему этому Mindstorms из детской игрушки превращается в весьма мощную штуку, позволяющую создавать сложные и «умные» механизмы, как например вот эта гитара:
Несмешной и баянистый анекдот, но нельзя просто так взять и начать эту публикацию не с него – он в лучшем виде отображает суть того, о чём пойдёт речь далее. Впрочем, из заголовка вы и так поняли, о чём речь.

Осторожно! Публикация может вызвать непреодолимое желание завести сына.
Урок истории
Компания LEGO (название произошло от датской фразы «leg godt», «Играй с удовольствием») не нуждается в представлении – она была основана в далёком 1932 году, хотя первые знакомые всем пластиковые кубики появились значительно позже, в 1947. Примечательно, что кубики LEGO, выпускаемые в те годы, полностью совместимы с теми, что выпускаются сейчас.
История создания компании, выпущенная компанией Pixar к 80-летнему юбилею LEGO:
Сейчас компания производит около 20 миллиардов деталек в год, то есть более 630 штук в секунду. В текущем модельном ряду более 600 различных конструкторов и так уж получилось, что серия Mindstorms является своего рода вершиной технической мысли, самым-самым навороченным конструктором. Если вкратце, то она позволяет делать вполне себе полноценных роботов.
Как гласит википедия, серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. Сегодня речь пойдёт о LEGO Mindstorms EV3 – последнем (третьем) поколении терминатора конструктора, который был представлен почти год назад, 4 января 2013 года (в продаже появился только спустя полгода).
Отличия EV3 от NXT 2.0
В принципе, главная идея осталась прежней – серия предназначена для сборки программируемых роботов. Поэтому первым встаёт вопрос, а что же поменялось с момента выхода предыдущего конструктора и стоит ли покупать новый? Основное отличие заключается в обновленных датчиках/моторах и, самое главное, в интеллектуальном блоке EV3 (EV означает EVolution):
| EV3 | NXT | |
| Дисплей | Монохромный LCD, 178x128 | Монохромный LCD, 100x64 |
| Процессор | 300 МГц Texas Instruments Sitara AM1808 (ARM9) | 48 МГц Atmel AT91SAM7S256 (ARM7TDMI) |
| Память | 64 Мб RAM 16 Мб Flash Слот microSDHC (до 32 Гб) | 64 Кб RAM 256 Кб Flash |
| USB-хост | Есть | Нет |
| Wi-Fi | Опционально, через USB-донгл | Нет |
| Bluetooth | Есть | Есть |
| Поддержка Apple-устройств | Есть | Нет |
Ещё одно отличие заключается в том, что серия NXT продавалась в нескольких версиях (в разные годы) и представляла собой разные наборы, базовые и ресурсные. У нового EV3 с этим попроще – пока он продаётся в основном варианте – 31313 (601 деталь), из которого можно наделать кучу всего. Но при желании можно докупить базовый набор 45544 (541 деталь) с дополнительными сенсорами и детальками (использовать детали от обычных конструкторов также никто не мешает). Кстати, обратите внимание на пятизначные артикулы – на такую нумерацию компания перешла в 2013 году.
Что касается совместимости, то тут было проделано всё возможное. Все NXT-сенсоры и моторы совместимы с EV3 и распознаются как NXT. EV3-сенсоры не работают с NXT, но EV3-моторы вроде как совместимы. NXT-кирпичик может быть запрограммирован софтом от EV3, но некоторые функции могут быть недоступны, а вот запрограммировать EV3-кирпичик NXT-софтом без сторонних решений не получится.
Внутри коробки
Ещё когда я сам был маленький и ездил с родителями в центральный Детский Мир (когда он ещё был), на Лубянку – уже тогда я не мог оторвать глаз от коробок с LEGO. Тогда не было ни Гиктаймс, ни даже Хабра, но с тех пор коробки остались всё такими же яркими и сочными, даже во взрослом возрасте активируют процесс слюновыделения ) В этом плане другим производителям есть чему поучиться.

Часть коробки, на самом деле, представляет собой (если её разрезать) трассу с различными цветовыми зонами, которую можно использовать для роботов с сенсорами цвета.
Все детальки аккуратно разложены по пакетикам, в комплекте – инструкция и набор наклеек. Давайте вкратце пройдёмся по тому, что положили в комплект.

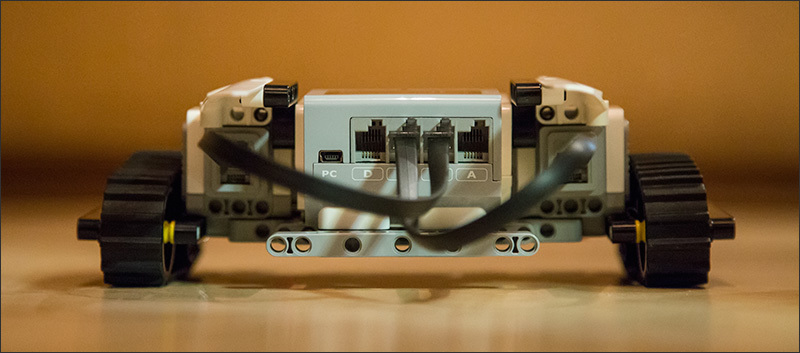
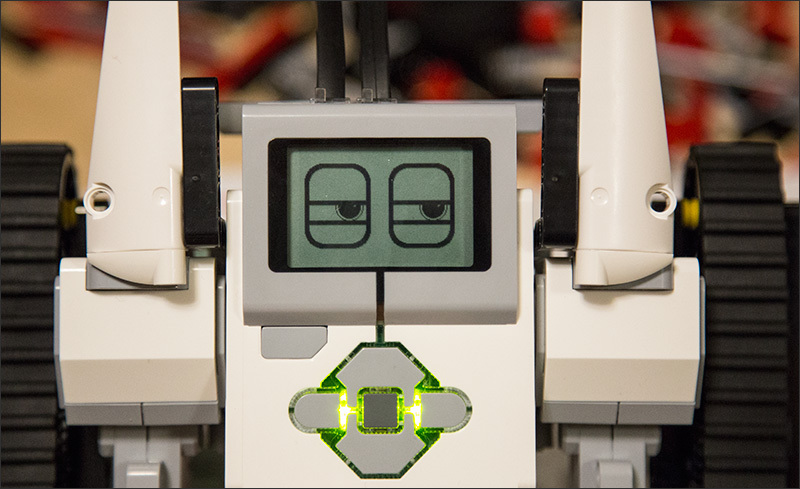
Сам EV3, он же интеллектуальный блок, он же сердце системы, он же «кирпичик» или «кубик». Служит центром управления и энергетической станцией для вашего робота и имеет следующие функциональные элементы:

– Многофункциональный монохромный дисплей с разрешением 178х128
– Шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы
– 4 порта ввода (1, 2, 3, 4) для подключения датчиков
– 4 порта вывода (A, B, C, D) для выполнения команд
– 1 разъём miniUSB для подключения EV3 к компьютеру
– 1 порт USB–хост (для соединения нескольких EV3 в одну цепь, например)
– 1 слот для карт памяти формата microSD (до 32Гб) – для увеличения объёма доступной памяти EV3
– Встроенный динамик



Кубик EV3 также поддерживает Bluetooth, WiFi (через USB-адаптер NETGEAR WNA1100 Wireless-N 150), для связи с компьютерами имеет программный интерфейс, позволяющий создавать программы и настраивать регистрации данных непосредственно на микрокомпьютере EV3.
» Большой EV3-сервомотор (2 штуки). Cоздан для работы с микрокомпьютером EV3 и имеет встроенный датчик вращения с точностью измерений до 1 градуса. Используя этот датчик, мотор может соединяться другими моторами, позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения может использоваться и при проведении различных экспериментов для точного считывания данных о расстоянии и скорости.

– Встроенный датчик вращения с точностью измерений до 1 град
– Максимальные обороты до 160-170 об/мин
– Максимальный крутящий момент в 40 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Средний EV3-сервомотор. Идеален для задач, когда скорость и быстрота отклика, а также размер робота важнее его грузоподъёмности.

– Встроенный датчик вращения с точностью измерений до 1 градуса
– Максимальные обороты до 240-250 об/мин
– Максимальный крутящий момент в 12 Нсм
– Автоматическая идентификация программным обеспечением EV3
» Датчик цвета (EV3). Способен определить 8 различных цветов, хотя также может использоваться как датчик освещённости.

– Измеряет отраженный красный свет и внешнее рассеянное освещение, от полной темноты до яркого солнечного света
– Фиксирует и определяет 8 цветов
– Частота опроса до 1 кГц
– Автоматическая идентификация программным обеспечением EV3
» Датчик касания (EV3). Позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение. Также способен определить количество нажатий, как одиночных, так и множественных.
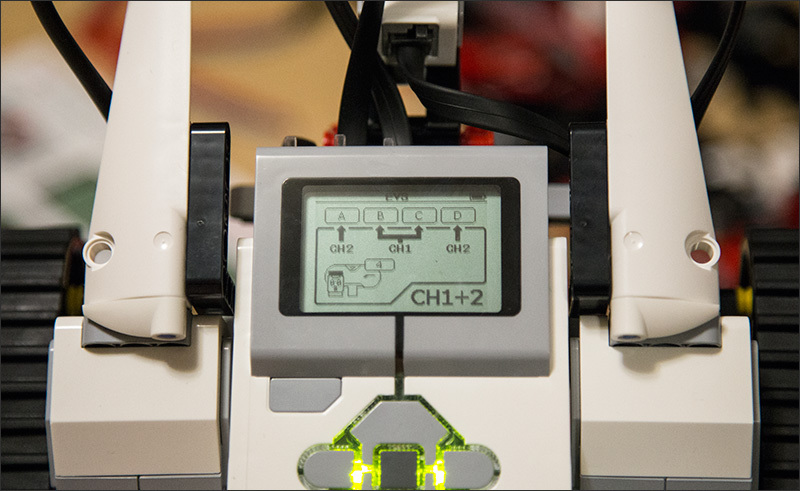
» Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.

– Измерения приближения/удаления в радиусе 50-70 см
– Радиус улавливания ИК-сигналов до 2 метров
– До 4 индивидуальных каналов приёма сигнала
– Получение удаленных ИК-команд управления
– Автоматическая идентификация программным обеспечением EV3
» Удалённый инфракрасный маяк. Разработан для использования с ИК-датчиком EV3. Маяк излучает ИК-сигнал, улавливаемый датчиком – может использоваться в качестве пульта дистанционного управления микрокомпьютера EV3, передавая сигналы на ИК-датчик.
– До 4 индивидуальных каналов передачи сигнала (переключатель прямо на корпусе)
– Имеет кнопку и тумблер для включения/выключения
– При работе ИК-маяка горит зелёный светодиод
– Автоматическое отключение при простое более 1 часа
– Радиус действия до 2 метров
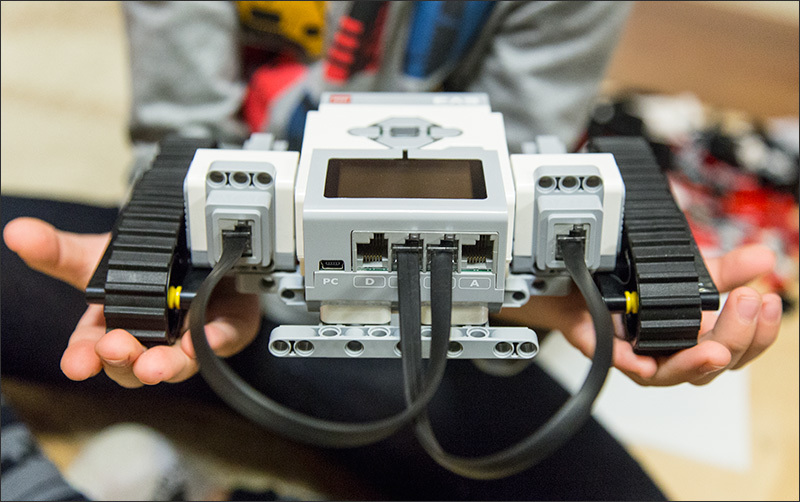
В отдельном пакетике смотаны провода для подключения датчиков и моторов к кубику, а также USB-шнур для подключения кубика к компьютеру.

Стоит отметить два важных момента. Во-первых, существуют другие датчики Lego, такие как:
» Гироскопический датчик (EV3). Цифровой гироскопический датчик EV3 позволяет измерять движение вращения робота, а также улавливать изменения в его движении и положении. Режим измерения углов с точностью до ± 3 градуса; встроенный гироскоп улавливает вращения с моментом до 440 град/с; частота опроса до 1 кГц.
» Ультразвуковой датчик (EV3). Генерирует звуковые волны и фиксируюет их отражения от объектов, тем самым измеряя расстояние до объектов. Также может использоваться в режиме сонара, испуская одиночные волны. Может улавливать звуковые волны, которые будут являться триггерами для запуска программ. Измеряет расстояния в пределах от 1 до 250 см, а точность измерений составляет ± 1 см.
А во-вторых, поддерживаются сенсоры и прочие аксессуары от сторонних производителей, таких как HiTechnic и Mindsensors – они предлагают всевозможные джойстики, инфракрасные датчики расстояний, магнитные датчики, компасы, гироскопы, акселерометры, таймеры, мультиплексоры, шаровые опоры, и т.д. Так что, если задаться вопросом, можно найти много всего интересного.

В общем, как вы уже поняли, LEGO – это для реальных пацанов!
Первая модель
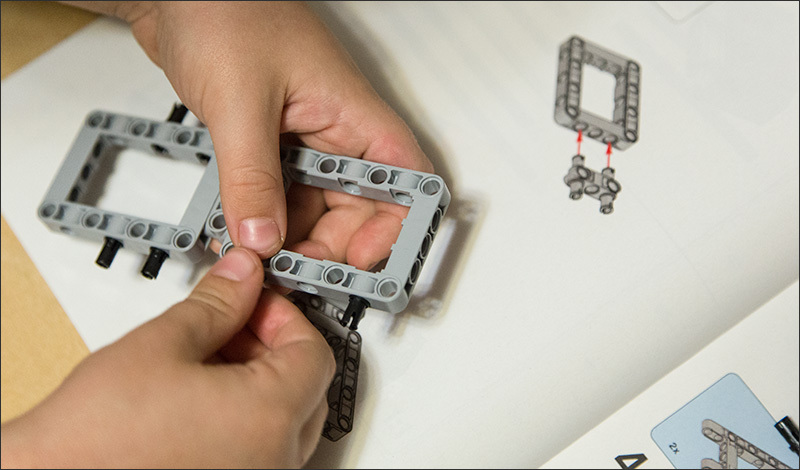
В комплекте с конструктором идёт бумажная инструкция, по которой можно собрать одну-единственную модель – некое подобие гусеничной самоходной машины.
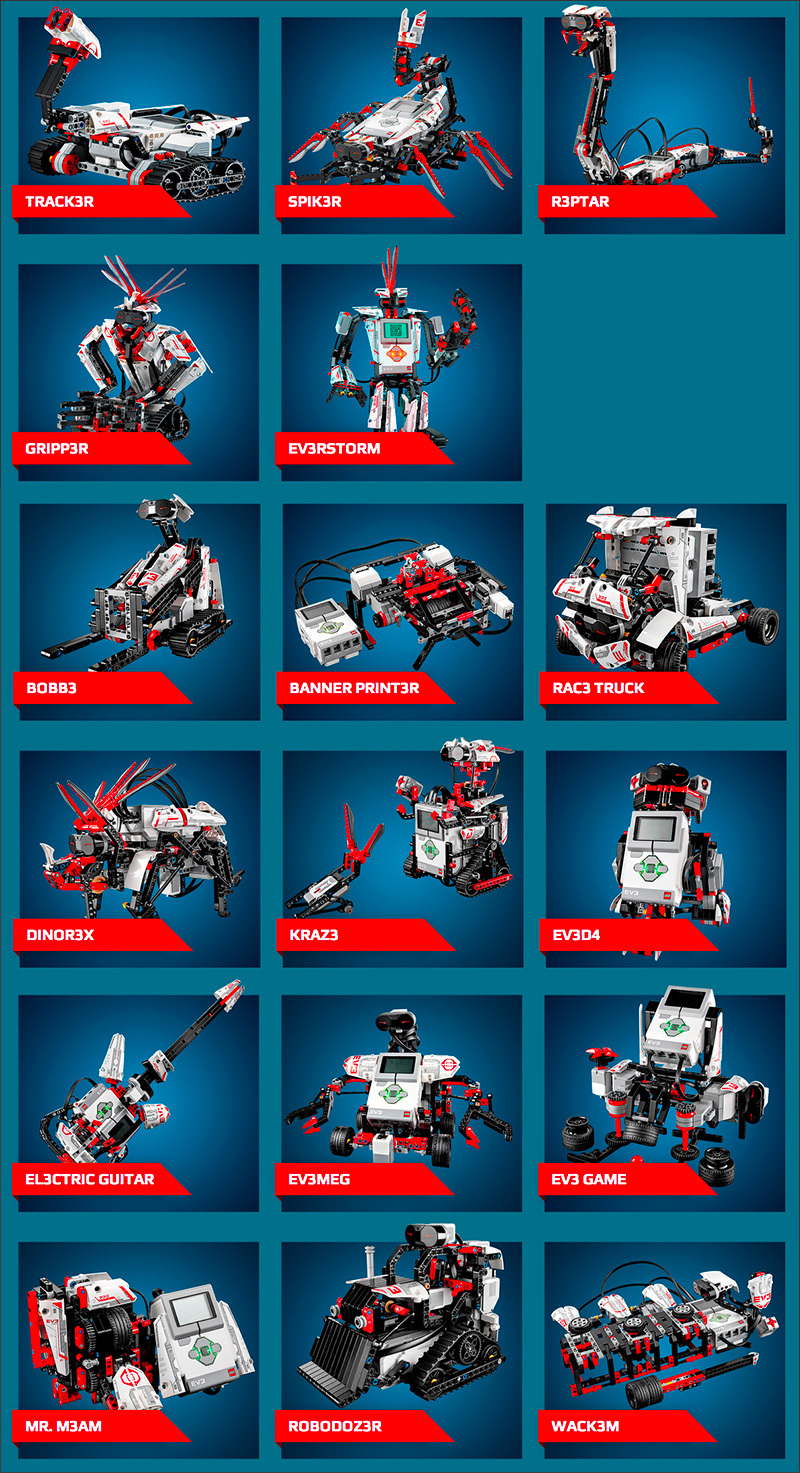
Сначала я удивился, ведь даже в самых простых наборах (серии типа LEGO Creator) всегда идёт несколько инструкций, а тут вдруг бумаги пожалели или места в коробке не нашли. Оказалось… что только на официальном сайте из набора деталей предлагается собрать 17 разных роботов! Поэтому 17 инструкций в коробке были бы действительно лишними (и для логистики, и для лесов природы). Вот названия роботов: EV3RSTORM, GRIPP3R, R3PTAR, SPIK3R, and TRACK3R. ROBODOZ3R, BANNER PRINT3R, EV3MEG, BOBB3, MR-B3AM, RAC3 TRUCK, KRAZ3, EV3D4, EL3CTRIC GUITAR, DINOR3X, WACK3M, и EV3GAME – инструкции для них придётся качать из инета, равно как и софт для подключения EV3 к компьютеру.
Инструкция наиподробнейшая, накосячить сложно. Сын сказал , что детали в пакетиках расфасованы не очень удачно – на первой же странице может потребоваться вскрыть 3 разных пакета, но это тоже мелочи.

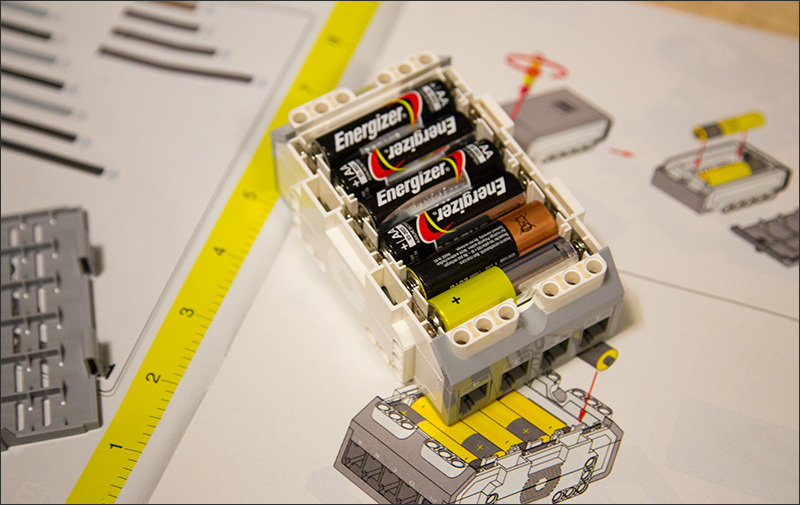
Кубик EV3 необходимо запитать, для чего можно использовать аккумулятор (нет в комплекте) или 6 пальчиковых батареек. Забегая вперёд – ещё 2 батарейки (но уже мизинчиковых) понадобятся для питания ИК-маяка (он же пульт ДУ).
Первую модель ребёнок (7 лет) собрал примерно минут за 30.
Процесс оказался не таким увлекательным, как, например, сборка моделей LEGO Technics – в инструкции предлагается собрать далеко не самого интересного робота: в нём лишь крупные детали, среди которых были практически все датчики и двигатели – видимо, чтобы продемонстрировать работу каждого из них.
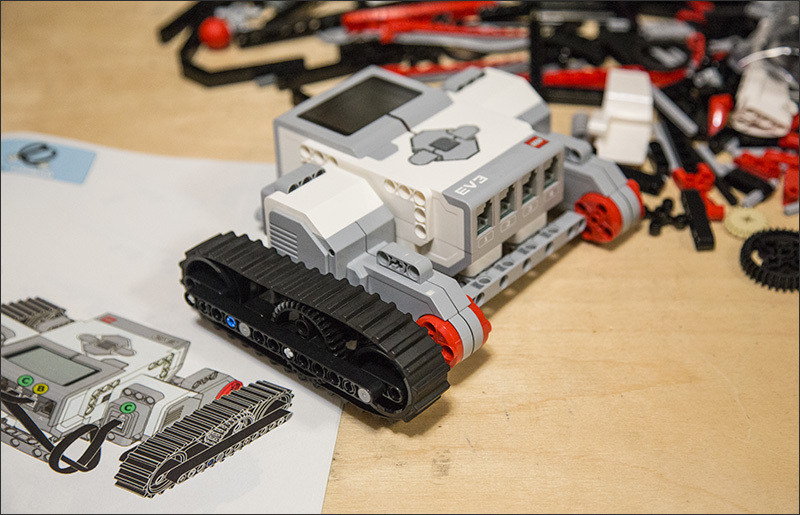
Но вот результат превзошёл все детские ожидания – впервые он собрал модель, которая могла двигаться сама: вперёд-назад, поворот, разворот на месте, крутила щупальцами…
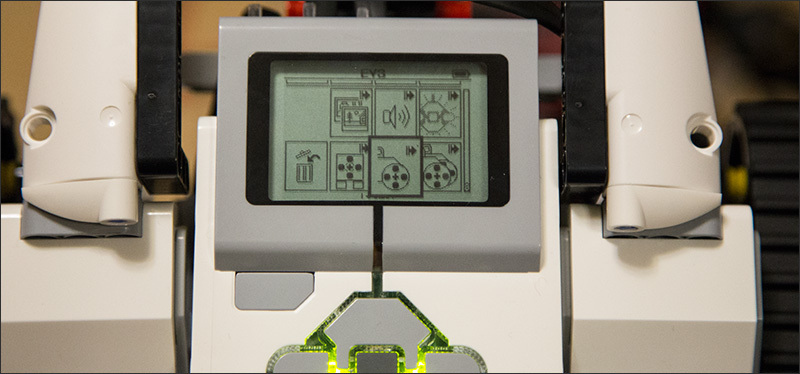
Запуск осуществляется с кубика EV3, для чего следует нажать пару кнопок на лицевой панели. Некоторые действия можно запрограммировать прямо на кубике: выбрать количество итераций, настроить подачу звукового сигнала и так далее – в одной статье всего не рассказать, курите мануалы.
Программировать через компьютер собранную выше модель не пришлось. Тем не менее, возможность такая есть, при этом на разных уровнях хардкорности.
Ребёнку проще всего будет начать с предлагаемого производителем софта, который есть как под Windows, так и под OS X. Во втором случае дистрибутив весит 666 Мб, а установленное приложение займёт гигабайт. Оно называется LEGO Mindstorms EV3 Home Edition и разработано совместно с небезызвестной компанией LabView. На сайте LEGO довольно много обучающих программированию материалов.
Сразу после запуска перед нами возникает интерактивный «гараж» из роботов, которых можно собрать из набора:
Выбираем понравившегося и начинаем собирать: перед нами появится интерактивная инструкция по сборке, видеоролики, а также подборка различных миссий, которые можно выполнить с собранным роботом. Вот почему дистрибутив весил так много.
Не вижу смысла описывать всё в деталях: вы быстрее скачаете приложение сами и увидите, что там есть и на каком уровне. Разве что упомяну один из недостатков, который мне больше всего запомнился: не самый дружелюбный (особенно для детей) интерфейс – от приложения попахивает каким–то банк-клиентом.
Нельзя ещё раз не отметить, что кубиком EV3 можно управлять со смартфона на операционных системах Android или iOS, для чего есть отдельные приложения.
Если всего этого оказалось мало, можете повысить градус хардкора. Для кубика EV3 существуют различные прошивки, которые позволяют расширить его возможности, скорость работы и т.д. Вот, например, альтернативная прошивка leJOS EV3 – прошивка с jvm, позволяющая программировать EV3 на языке Java. Хотите на другом языке? Окей, гугл – в вашем распоряжении почти 60 вариантов на выбор: ASM/C/C++/Perl/Python/Ruby/VB/Haskell/Lisp/Matlab/LabVIEW и многое-многое другое.
Более подробно об этом я рассказывать не буду по нескольким причинам: во-первых, программист из меня полный false (все надежды на сына), во-вторых, пока мы успели собрать только одну модель (и на выходных возьмёмся за вторую), а в-третьих – вы уже и так оформили заказ на этот конструктор и скоро сами всё узнаете ;) Ну а если серьёзно, то статья и так уже огромная – вот лучше две ссылочки изучите: раз и два.
Ну и ещё большой плюс – это LEGO-сообщества, которых полно по всему миру. Можете быть уверены, что на любом из этапов экспериментов с роботами вы всегда сможете найти единомышленников и тех, кто сможет помочь с решением проблемы. Помимо дружелюбных сообществ, на просторах сети выложено огромное множество различных инструкций, моделей, исходников, видеороликов и обучающих материалов. Всё это означает одно: с Mindstorms вы не соскучитесь.
Читайте также: