
Lego mindstorms программирование на python
Обновлено: 25.04.2024
Привет, Хабр! Мы уже рассказывали о платформе LEGO MINDSTORMS Education EV3. Основные задачи этой платформы — обучение на практических примерах, развитие навыков STEAM и формирование инженерного мышления. В ней можно проводить лабораторные работы по изучению механики и динамики. Лабораторные стенды из кубиков LEGO и утилиты по регистрации и обработке данных делают опыты еще интереснее и нагляднее и помогают детям лучше понять физику. Например, школьники могут собрать данные о температуре плавления и с помощью приложения систематизировать их и представить в виде графика. Но это только начало: сегодня мы расскажем, как дополнить этот набор средой программирования MicroPython и использовать его для обучения робототехнике.

Учим программированию с помощью EV3
Современные школьники хотят видеть красочный результат. Да, им скучно, если программа выводит в консоль числа, и они хотят рассматривать цветные графики, диаграммы и создавать настоящих роботов, движущихся и выполняющих команды. Обычный код тоже кажется детям слишком сложным, поэтому обучение лучше начинать с чего-нибудь полегче.
Базовая среда программирования EV3 создана на основе графического языка LabVIEW и позволяет задавать алгоритмы для робота визуально: команды представлены в виде блоков, которые можно перетаскивать и соединять.

Такой способ хорошо работает, когда нужно показать, как строятся алгоритмы, но он не подходит для программ с большим количеством блоков. При усложнении сценариев необходимо переходить на программирование с помощью кода, но детям трудно сделать этот шаг.
Здесь есть несколько хитростей, одна из которых — показать, что код выполняет те же задачи, что и блоки. В среде EV3 это можно сделать благодаря интеграции с MicroPython: дети создают одну и ту же программу в базовой среде программирования с помощью блоков и на языке Python в Visual Studio Code от Microsoft. Они видят, что оба способа работают одинаково, но кодом решать сложные задачи удобнее.
Переходим на MicroPython
Среда EV3 построена на базе процессора ARM9, и разработчики специально оставили архитектуру открытой. Это решение позволило накатывать альтернативные прошивки, одной из которых стал образ для работы с MicroPython. Он позволяет использовать Python для программирования EV3, что делает работу с набором еще ближе к задачам из реальной жизни.
Чтобы начать работать, нужно скачать образ EV3 MicroPython на любую microSD-карту, установить ее в микрокомпьютер EV3 и включить его. Затем нужно установить бесплатное расширение для Visual Studio. И можно приступить к работе.
Программируем первого робота на MycroPython

На нашем сайте есть несколько уроков для освоения базовых понятий робототехники. Модели на EV3 знакомят детей с азами, которые используются в самоуправляемых автомобилях, заводских роботах-сборщиках, станках с ЧПУ.
Мы возьмем для примера чертежную машину, которую можно научить рисовать узоры и геометрические фигуры. Данный кейс является упрощенным вариантом взрослых роботов-сварщиков или фрезеровщиков и показывает, как можно использовать EV3 совместно с MicroPython для обучения школьников. А еще чертежная машина может разметить отверстия в печатной плате для папы, но это уже другой уровень, требующий математических расчетов.
Для работы нам понадобятся:
- базовый набор LEGO MINDSTORMS Education EV3;
- большой лист клетчатой бумаги;
- цветные маркеры.
Сначала инициализируем библиотеку модулей EV3:
Настраиваем платформу, которая вращает ручку как мотор в порте B. Задаем передаточное отношение двухступенчатой зубчатой передачи с количеством зубьев 20-12-28 соответственно.
Настраиваем подъемный механизм для ручки как мотор в порте C:
Настраиваем гироскоп, измеряющий угол наклона ручки, в порте 2:
Настраиваем цветовой датчик в порте 3. Датчик используется, чтобы определять белую бумагу под чертежной машиной:
Настраиваем датчик касания в порте 4. Робот начинает рисовать, когда датчик нажат:
Определяем функции, которые поднимают и опускают ручку:
Определяем функцию для поворота ручки на заданный угол или до определенного угла:
Если целевой угол больше, чем текущий угол гироскопического датчика, продолжаем движение по часовой стрелке с положительной скоростью:
Если целевой угол меньше, чем текущий гироскопического датчика, то двигаемся против часовой стрелки:
Останавливаем вращающуюся платформу, когда целевой угол будет достигнут:
Устанавливаем начальное положение ручки в верхнем положении:
Теперь идет основная часть программы — бесконечный цикл. Сначала EV3 ожидает, когда датчик цвета обнаружит белую бумагу или синюю стартовую клетку, а датчик касания будет нажат. Затем он рисует узор, возвращается в исходное положение и повторяет все заново.
Когда устройство не готово, светодиоды на контроллере принимают красный цвет, и на ЖК-экране отображается изображение «палец вниз»:
Дожидаемся, когда датчик цвета считает синий или белый цвет, устанавливаем цвет светодиодов зеленым, отображаем на ЖК-экране изображение «палец вверх» и сообщаем, что устройство готово к работе:
Дожидаемся нажатия датчика касания, присваиваем гироскопическому датчику значение угла 0 и начинаем рисовать:
Поднимаем держатель ручки и возвращаем его в исходное положение:
Вот такая несложная программа у нас получилась. И теперь запускаем ее и смотрим на робота-чертежника в деле.
Что дают такие примеры

EV3 — это инструмент для профориентации в рамках профессий STEM и точка входа в инженерные специальности. Так как на нем можно решать практические задачи, дети получают опыт технических разработок и создания промышленных роботов, учатся моделировать реальные ситуации, понимать программы и анализировать алгоритмы, осваивают базовые конструкции программирования.
Поддержка MicroPython делает платформу EV3 подходящей для обучения в старших классах. Ученики могут попробовать себя в роли программистов на одном из самых популярных современных языков, познакомиться с профессиями, связанными с программированием и инженерным проектированием. Наборы EV3 показывают, что писать код — это не страшно, готовят к серьезным инженерным задачам и помогают сделать первый шаг к освоению технических специальностей. А для тех, кто работает в школе и связан с образованием, у нас подготовлены программы занятий и учебные материалы. В них детально расписано, какие навыки формируются при выполнении тех или иных задач, и как полученные навыки соотносятся со стандартами обучения.
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.

Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.

Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.

Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.

Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках

Рисунок 4 — Окно Connections

Рисунок 5 — Окно Data Connections

Рисунок 6 — Законченный вид диаграммы

2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.

Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,

Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Чтобы программировать робота LEGO Mindstorms EV3 на языке Python мало знать только этот язык. Необходимо ещё иметь представление о библиотеке ev3dev.ev3, для работы с датчиками и моторами. А также не помешало бы иметь под рукой полноценную среду разработки с подсказками, подсветкой синтаксиса и отладчиком. В статье я опишу, как настроить EV3 и компьютер для комфортной разработки вашего проекта на Python.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.

Чтобы программировать робота LEGO Mindstorms EV3 на любимом языке программирования, использовать огромное количество продвинутых библиотек и получить доступ к дополнительному подключаемому оборудованию, такому как клавиатура, джойстики, мышки и камеры, вам просто необходимо использовать полноценную операционную систему. Здесь на помощь придёт ev3dev – операционная система, базирующаяся на Debian Linux. Я предлагаю вам познакомиться с процессом установки и настройки этой операционной системы.

С помощью дополнительных блоков можно существенно расширить возможности своей программы, созданной в среде разработке LEGO Mindstorms EV3. Читая эту статью вы изучите анатомию блока и научитесь создавать свои собственные блоки.
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
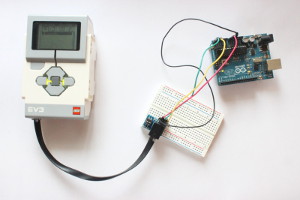
Иногда, при создании роботов возникает необходимость использования нескольких различных платформ в одном проекте, например, EV3 и Arduino. Так вы сможете использовать сильные стороны каждой из платформ и распараллелить выполняемые задачи. Я предлагаю вам ознакомиться с переводом статьи, в которой описано, как соединить EV3 и Arduino и как использовать Arduino совместно с EV3.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.

Open Roberta Lab или открытая лаборатория Роберты, робо-леди, которую вы видите на картинке – это облачная среда программирования роботов Lego Mindstorms EV3 очень похожая на Scratch 2, но не требующая установки на компьютер. Ваши готовые программы вы можете протестировать здесь же на симуляторе. Для программирования и использования симулятора вам достаточно иметь браузер и доступ в интернет.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
Как известно, виртуальная Java-машина leJOS, которую мы можем использовать для программирования роботизированного конструктора LEGO Mindstorms EV3, совместима не только с официально поддерживаемым адаптером NETGEAR N150, но и с рядом других адаптеров. Здесь я предлагаю вам перевод статьи с официального блога leJOS, в которой приводится сравнение различных поддерживаемых WiFi-адаптеров.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Эта статья будет интересна тем, кто хочет сделать программу для дистанционного управления роботом EV3 со стандартной заводской прошивкой через Bluetooth, WiFi или USB и не важно, с какого устройства или операционной системы. Здесь мы рассмотрим протокол взаимодействия между модулем EV3 и вашей программой.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

С помощью чего только не программируются роботы LEGO Mindstorms EV3. Поддерживается большое количество языков программирования на любой вкус. Но сегодня я хочу рассказать вам, о самом, на мой взгляд, удобном и богатом, в плане возможностей, способе программирования роботов LEGO Mindstorms EV3. Удобный, потому что разрабатывать можно в среде разработки Eclipse на языке Java, а богатый, потому, что виртуальная машина Java для EV3, которая называется leJOS, поддерживает не только стандартные возможности EV3, но даёт и гораздо больше.
Если вам нравится графическая среда программирования Scratch 2.0, то вам необязательно отказываться от неё для программирования роботов Lego Mindstorms EV3. Достаточно лишь установить и настроить нужное программное обеспечение, о чём и будет написано в этой статье.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В сегодняшнем обзоре я попытаюсь разобраться, какой электрический самокат лучше всего подходит для перемещения по городу взрослому человеку. Причём я буду обращать внимание на самое главное, что должно быть у городского электросамоката.
Чтобы программировать робота LEGO Mindstorms EV3 на языке Python мало знать только этот язык. Необходимо ещё иметь представление о библиотеке ev3dev.ev3, для работы с датчиками и моторами. А также не помешало бы иметь под рукой полноценную среду разработки с подсказками, подсветкой синтаксиса и отладчиком. В статье я опишу, как настроить EV3 и компьютер для комфортной разработки вашего проекта на Python.

Tinkercad – это простой веб-инструмент для 3D-проектирования и 3D-печати, позволяющий за считанные минуты создавать 3D-модели, будь то игрушки или декор, украшения или модели Minecraft. С ним смогут работать и дети, начинающие осваивать 3D-проектирование, и профессионалы. Давайте разберёмся, как проектировать в Tinkercad, какие здесь есть инструменты и возможности.

Чисто из интереса и для самообразования я решил заказать себе 3D-принтер. Выбор пал на американский принтер M3D Micro, благодаря аккуратному внешнему виду и малым габаритам. То, что я не смогу распечатать на нём большие вещи я знал, но для меня решающую роль сыграл размер самого принтера. Поверьте, за счёт компактности, его можно убрать в любой шкаф, он влезет на любую полку и на столе он занимает мало места.
Никогда не задумывались о том, что вы можете самостоятельно сделать гравировку на кожаном портмоне или чехле для смартфона, нанести фотографию на деревянную поверхность? А может быть, вы всегда хотели с большой точностью вырезать детали из различных материалов для создания красивых поделок или корпусов для роботов? А ведь всё это можно делать с помощью компактных настольных лазерных гравёров и резаков. Давайте рассмотрим несколько таких устройств.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
Чтобы программировать робота LEGO Mindstorms EV3 на любимом языке программирования, использовать огромное количество продвинутых библиотек и получить доступ к дополнительному подключаемому оборудованию, такому как клавиатура, джойстики, мышки и камеры, вам просто необходимо использовать полноценную операционную систему. Здесь на помощь придёт ev3dev – операционная система, базирующаяся на Debian Linux. Я предлагаю вам познакомиться с процессом установки и настройки этой операционной системы.
Now that you’ve set up your computer and EV3 Brick, you’re ready to start writing programs.
To make it easier to create and manage your programs, let’s first have a quick look at how MicroPython projects and programs for your EV3 robots are organized.
Programs are organized into project folders, as shown in Figure 8 . A project folder is a directory on your computer that contains the main program (main.py) and other optional scripts or files. This project folder and all of its contents will be copied to the EV3 Brick, where the main program will be run.
This page shows you how to create such a project and how to transfer it to the EV3 Brick.

Figure 8 A project contains a program called main.py and optional resources like sounds or MicroPython modules.
Creating a new project¶
To create a new project, open the EV3 MicroPython tab and click create a new project, as shown in Figure 9 . Enter a project name in the text field that appears and press Enter. When prompted, choose a location for this program and confirm by clicking choose folder.

Figure 9 Creating a new project. This example is called getting_started, but you can choose any name.
When you create a new project, it already includes a file called main.py. To see its contents and to modify it, open it from the file browser as shown in Figure 10 . This is where you’ll write your programs.
If you are new to MicroPython programming, we recommend that you keep the existing code in place and add your code to it.

Figure 10 Opening the default main.py program.
Opening an existing project¶
To open a project you created previously, click File and click Open Folder, as shown in Figure 11 . Next, navigate to your previously created project folder and click OK. You can also open your recently used projects using the Open Recent menu option.

Figure 11 Opening a previously created project.
Connecting to the EV3 Brick with Visual Studio Code¶
To be able to transfer your code to the EV3 Brick, you’ll first need to connect the EV3 Brick to your computer with the mini-USB cable and configure the connection with Visual Studio Code. To do so:
- Turn the EV3 Brick on
- Connect the EV3 Brick to your computer with the mini-USB cable
- Configure the USB connection as shown in Figure 12 .

Figure 12 Configuring the USB connection between the computer and the EV3 Brick
Downloading and running a program¶
You can press the F5 key to run the program. Alternatively, you can start it manually by going to the debug tab and clicking the green start arrow, as shown in Figure 13 .
When the program starts, a pop-up toolbar allows you to stop the program if necessary. You can also stop the program at any time using the back button on the EV3 Brick.
If your program produces any output with the print command, this is shown in the output window.

Figure 13 Running a program
Expanding the example program¶
Now that you’ve run the basic code template, you can expand the program to make a motor move. First, attach a Large Motor to Port B on the EV3 Brick, as shown in Figure 14 .

Figure 14 The EV3 Brick with a Large Motor attached to port B.
Next, edit main.py to make it look like this:
This program makes your robot beep, rotate the motor, and beep again with a higher pitched tone. Run the program to make sure that it works as expected.
Managing files on the EV3 Brick¶
After you’ve downloaded a project to the EV3 Brick, you can run, delete, or back up programs stored on it using the device browser as shown in Figure 15 .

Figure 15 Using the EV3 device browser to manage files on your EV3 Brick
© Copyright 2019-2020 The LEGO Group. All rights reserved.
LEGO, the LEGO logo, MINDSTORMS and the MINDSTORMS EV3 logo are trademarks and/or copyrights of the LEGO Group.
Читайте также: