
Lego робот на гусеницах
Обновлено: 28.04.2024
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.


Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
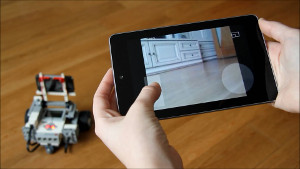
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.


В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.

Получилась вот такая платформа. Высота платформы уменьшилась примерно на 4,5 мм, поэтому датчик цвета нужно поднимать на 1 деление, например, чтобы идти по линии. Конечно, он тогда получается высоковато, но всё равно работает. Вместо стандартного крепления к приводной платформе, нужно будет сделать, например, вот такое:

Кроме датчика цвета, все остальные датчики и захват работают нормально. Их также можно прикрепить к платформе сразу все вместе, что видно на видео.
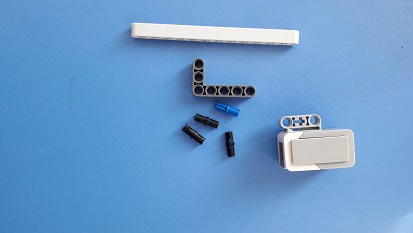
Теперь, что касается деталей. Детали использованы из стартового образовательного набора Core Set LEGO Mindstorms Education EV3, никакие дополнительные вам детали не понадобятся. Полный перечень смотрите в инструкции для сборки.
Итак, вот инструкция по сборке приводной платформы EV3 на гусеничном ходу.
В версии от 04.03.2015 исправлен список деталей.
А вот, на всякий случай, инструкция для сборки стандартной приводной платформы. Также здесь есть инструкции для крепления датчиков.
Простая схема робота на гусеницах из деталей lego mindstorms ev3. Роботы ev3 на гусеницах достаточно компактны и при этом мощные. Робота на гусеницах ev3 можно использовать для прохождения полосы препятствий, так как робот lego на гусеницах легко преодолевает и ямы и горки. Программирование робота танка ev3ничем не отличается от программирование обычного колесного робота ev3, только повороты на роботе танке необходимо делать, выставляя мощности моторов один с положительной мощностью другой с отрицательной. Повороты робота ev3
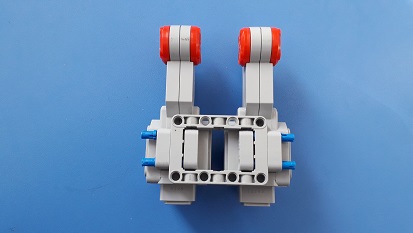
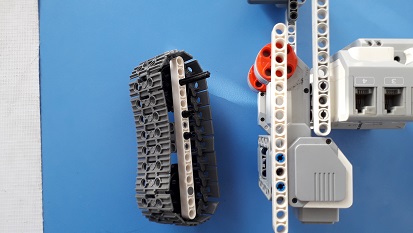
Инструкция для сборки робота на гусеницах ev3

1
2
3

4
5

6
Аналогично собирается трак для другой стороны робота танка lego ev3

7
8
9

10

11
12

13
14

15
16
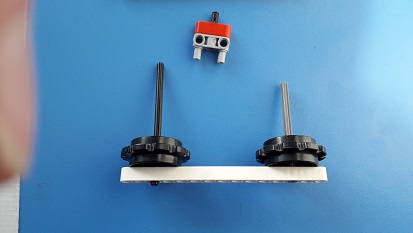
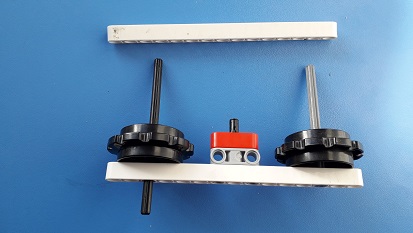
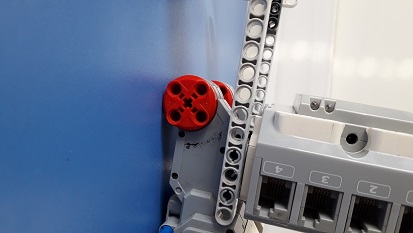
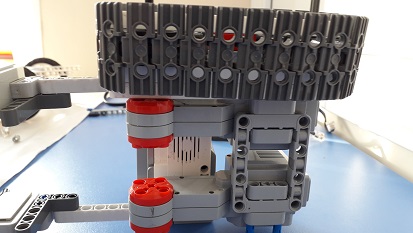
Ось трака вдиваем в мотор и крпеим трак на малые штифты к боковой большой балке, которая присоединена к мотору
17
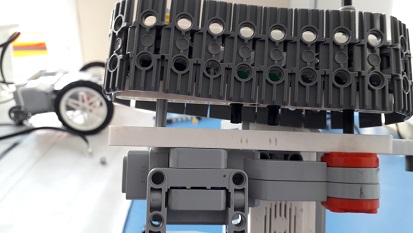
Аналогично крепим гусеничный трак на другой стороне робота танка ev3

18
19
20
21
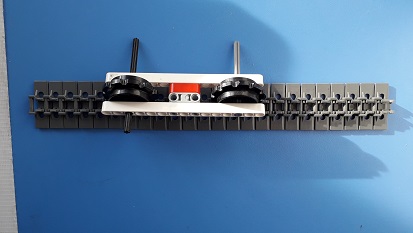
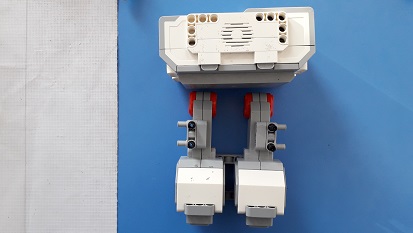
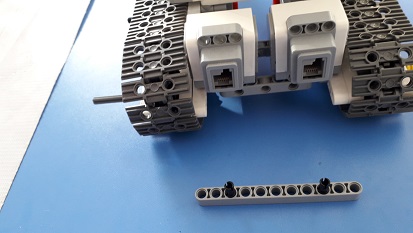
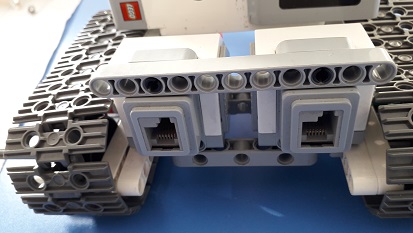
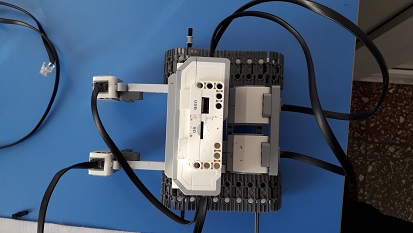
Подсоединяем моторы к блоку спомощью проводов к портам A и B. Датчики цвета подсоединяем к портам 1 и 3 Вид сверху робота танка ev3
22
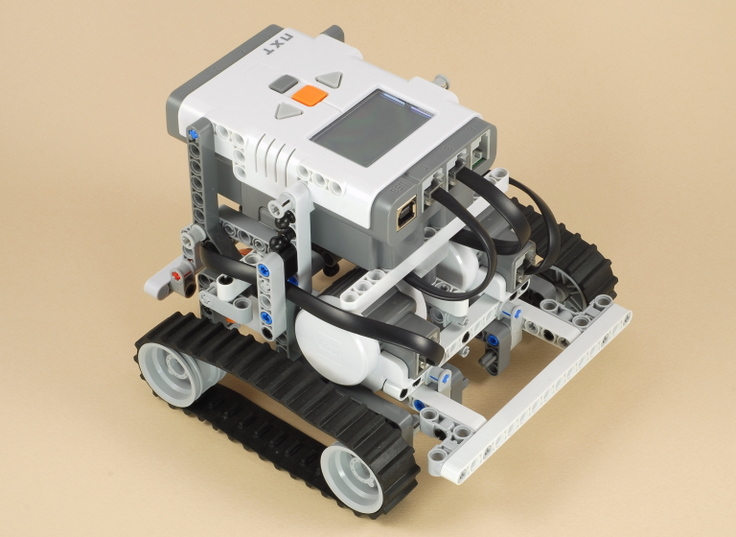
Ниже приведены инструкции для нескольких модификаций Мультибот-автомобиля:
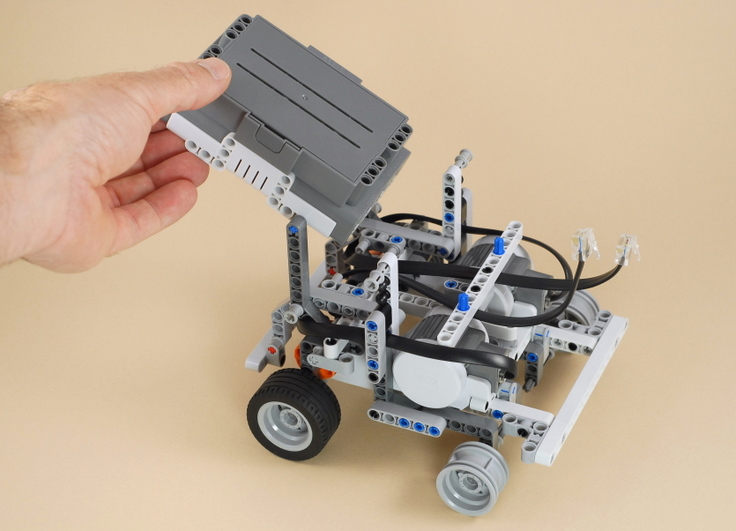
Смена батареек

| Чтобы заменить батареи, просто отключите провод двигателя от NXT и вытащите серую шпильку с передней стороны блока NXT, как показано выше. Далее Вы сможете вытащить блок NXT и легко заменить батарею. |
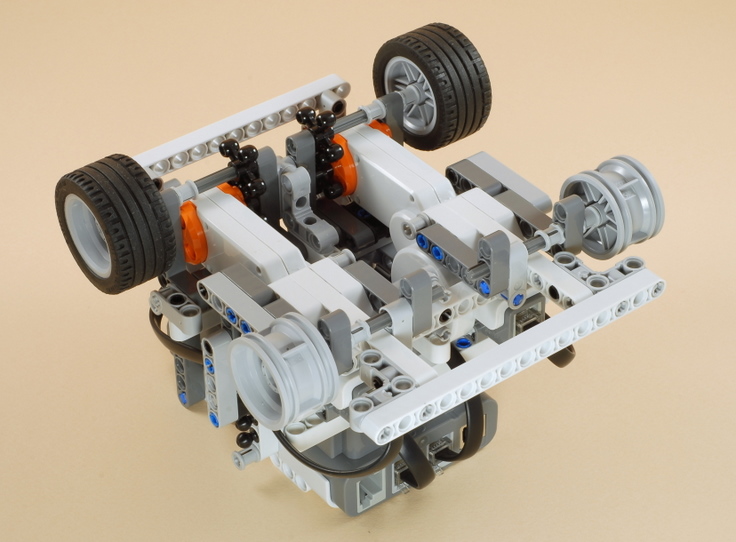
Переход от колес к гусеницам
| Multi-Bot предназначен для использования как колеса или гусеницы, которые идут с NXT 2.0 комплекте, и Вы можете легко переключаться между ними. То есть имеется возможность менять высоту робота, за счёт перемещения колёс выше или ниже, а также устанавлавать специализированные гусеницы. |
1. Перенос передней оси на одно отверстие
| В первую очередь переверните робота с ног на голову, чтобы было легче работать. |
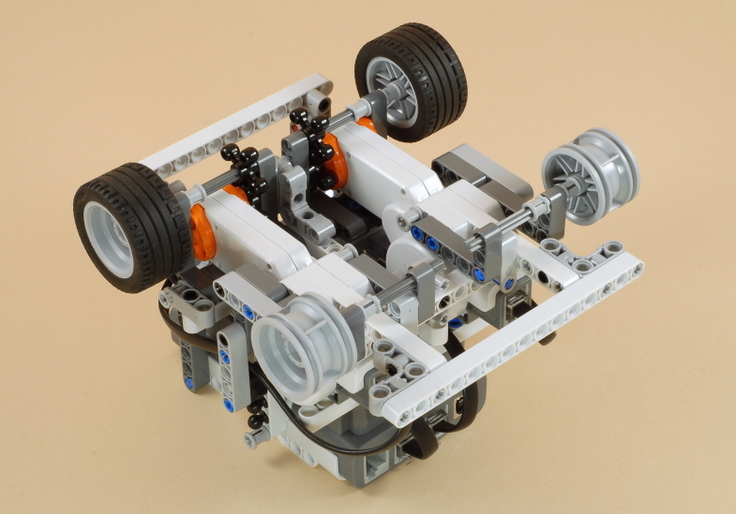
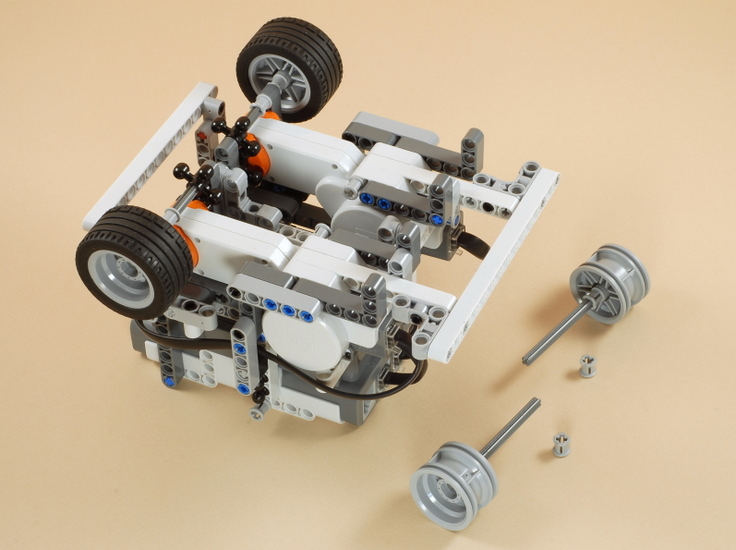
| Удалите переднюю ось и внутреннюю втулку, как показано выше, а затем повторно установить переднюю ось на одно отверстие выше (на блоке NXT), как показано ниже. |
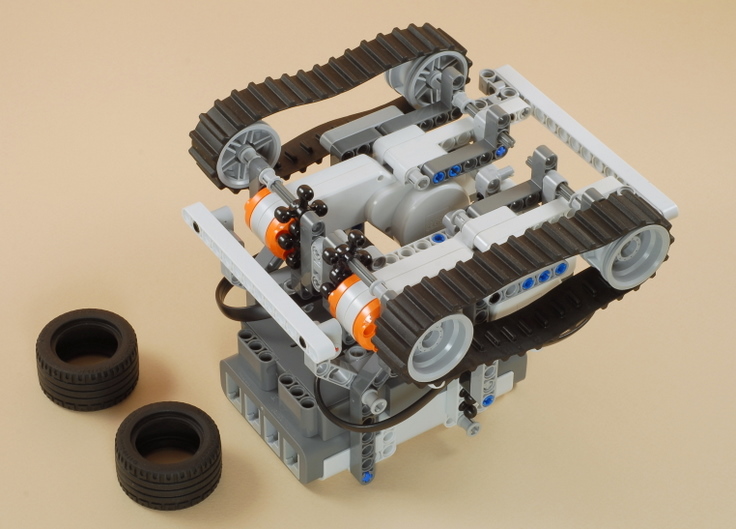
2. Замена шин на гусеницы
| Удалите шины с задних колес, а затем установить гусеницы. |
Изменение передач
| Четыре "шестерёнки с крупными зубцами" в задней части Мультибота используется в качестве передач, чтобы у автомобиля был больше дорожный просвет (при движении по ступенькам или на ковре). Вы также можете изменить типы используемых передач для изменения скорости и мощности транспортного средства. |
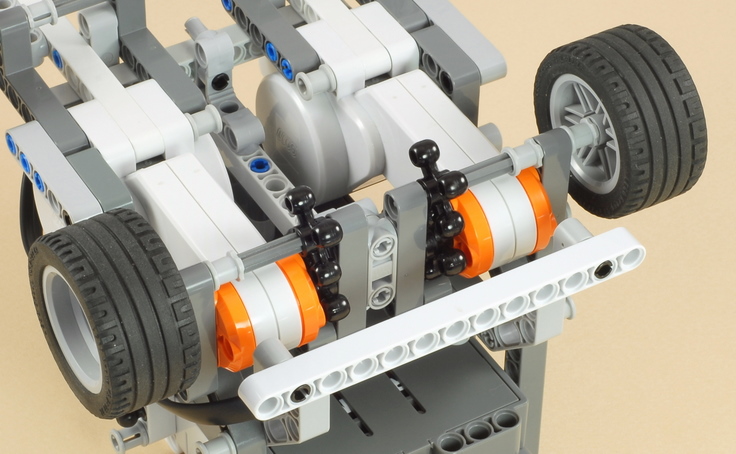
| Чтобы получить передаточное отношение больше чем 1:1, которое предоставляют "шестерёнки с крупными зубцами", Вы можете использовать 12-зубчатые и 20-зубчатые шестерёнки. В зависимости от того, как монтировать их, вы можете получить передаточное число с отношением 5:3 или 3:5. |

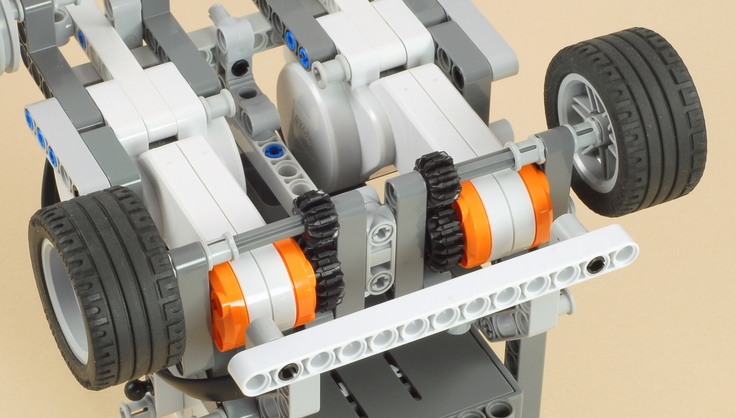
| Изображенный ниже 12-зубчатые и 20-зубчатые шестерёнки установлены на передаточное отношение равное 3:5, что заставляет автомобиль двигаться на 60% быстрее, чем при соотношении 1:1. |
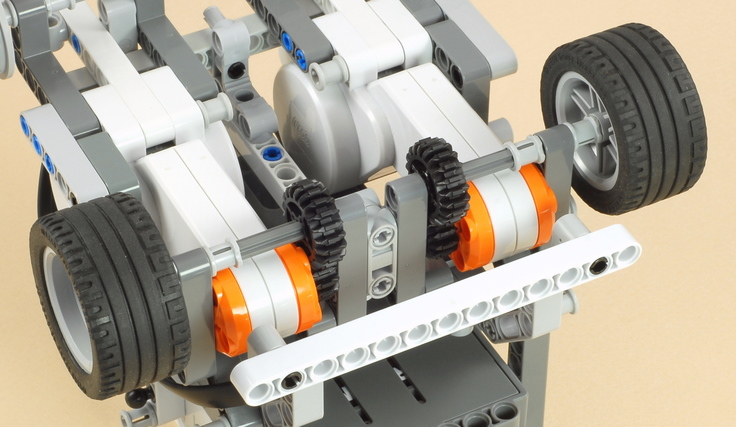
| Изображенный ниже 12-зубчатые и 20-зубчатые шестерёнки установлены на передаточное отношение 5:3, что заставляет автомобиль двигаться на 40% медленнее, чем при соотношении 1:1. |
| Чтобы использовать другие механизмы, Вы всегда можете заново собрать Мультибот и подставить соответствующие передачи, когда это требуется. Кроме того, можно и другими способами изменить передаточное отношение колё (но это уже сложнее). |
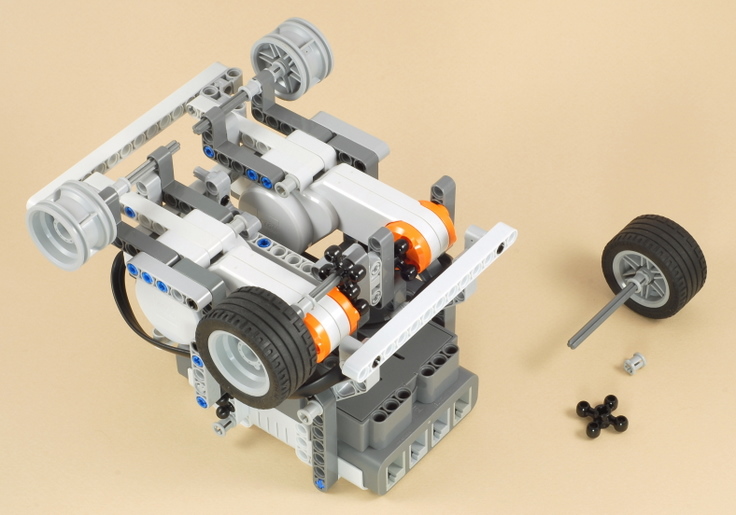
Удалить две шестерёнки, которые прикреплены к оси двигателя гораздо сложнее, потому что они установлены внутри осей, которые скрываются в задней структуре робота. Для этого вы можете использовать длинную ось 12-го размера из комплекта NXT как инструмент выталкивания 6-и размерных осей, как показано ниже.
В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
Получилась вот такая платформа. Высота платформы уменьшилась примерно на 4,5 мм, поэтому датчик цвета нужно поднимать на 1 деление, например, чтобы идти по линии. Конечно, он тогда получается высоковато, но всё равно работает. Вместо стандартного крепления к приводной платформе, нужно будет сделать, например, вот такое:
Кроме датчика цвета, все остальные датчики и захват работают нормально. Их также можно прикрепить к платформе сразу все вместе, что видно на видео.
Теперь, что касается деталей. Детали использованы из стартового образовательного набора Core Set LEGO Mindstorms Education EV3, никакие дополнительные вам детали не понадобятся. Полный перечень смотрите в инструкции для сборки.
Итак, вот инструкция по сборке приводной платформы EV3 на гусеничном ходу.
В версии от 04.03.2015 исправлен список деталей.
А вот, на всякий случай, инструкция для сборки стандартной приводной платформы. Также здесь есть инструкции для крепления датчиков.
Читайте также: