Лего роботы перетягивание каната
Обновлено: 14.05.2024
Исследуйте результат действия уравновешенных и неуравновешенных сил на движение объекта.

1. Подготовка
( 30 минут )
• Ознакомьтесь с процессом общей подготовки в главе «Управление работой в классе».
• Ознакомьтесь с проектом, чтобы хорошо представлять порядок действий.
• Определите, как вы хотите представить этот проект: используйте видео, представленное в проекте в ПО WeDo 2.0, или материалы по своему усмотрению.
• Определите конечный результат данного проекта: параметры для представления и создания документа.
• Убедитесь, что отведенного времени достаточно для достижения целей.
2. Исследование
( 30-60 минут )

PLAY
Вступительный ролик может подготовить почву для рассмотрения и обсуждения с учащимися последующих идей по этому проекту.
Вступительный ролик
Прошло много времени с тех пор, как люди впервые попробовали перемещать большие объекты. От древних цивилизаций до современности для того, чтобы тянуть или толкать объекты, использовались различные инструменты.
- Если не удается сдвинуть что-то, это происходит потому, что такая же или большая сила тянет объект в противоположном направлении.
- Если объект начинает перемещаться, это означает, что сила в направлении движения больше.
- На Земле трение играет в этой системе важную роль.
- По поверхности с меньшим трением тот же вес тянуть легче, чем по неровной поверхности.
Область науки о силах и движении была подробно изучена и разъяснена ученым Исааком Ньютоном в XVII веке. Вы каждый день сталкиваетесь с законами физики, описанными им.

Вопросы для обсуждения
- Какими способами можно привести объект в движение?
Чтобы заставить объект двигаться, надо тянуть или толкать объект, другими словами, нужно приложить к нему силу. - Можете ли вы объяснить трение? По какой поверхности легче тянуть предмет: по обычной или скользкой?
Этот вопрос относится к трению. Перемещать объект по гладкой поверхности легче, чем по шероховатой. В зависимости от массы объекта, объект может быть труднее перемещать по скользкой поверхности, потому что сцепление в данном случае при тяге оказывается меньше. - Спрогнозируйте, что произойдет, если сила тяги в одном направлении больше, чем в другом.
Этот ответ должен быть основан на прогнозах учащихся,
высказанных на начальном этапе. Это означает, что на данный
момент ответы учащихся могут быть неверными. После урока учащиеся должны иметь возможность обсудить тот факт, что объект будет перемещаться в направлении наибольшей толкающей или тянущей силы. - Можно ли вывести соотношение между уравновешенными силами и способностью объектов к перемещению?
Неуравновешенные силы могут привести к изменениям в
движении объекта (ускорению, замедлению и т. д.).
Дайте учащимся выбрать инструмент (-ы), который (-е) они считают наиболее подходящим (-и) для документирования своих идей и обмена ими. Порекомендуйте использовать записи, видео, изображения, конспекты или другие способы документирования.
3. Создание
( 45-60 минут )
Построение и программирование робота-тягача
Учащиеся будут следовать инструкциям по сборке для создания роботатягача. Этот робот-тягач будет тянуть некоторые объекты, помещенные в его корзину. Это исследование может быть проведено на различных типах поверхностей, таких как дерево или ковер. Используйте одну и ту же поверхность в течение всего проекта.
1. Постройте робот-тягач.
В этом проекте используется модуль колебаний — коническая шестерня. Коническое зубчатое колесо изменяет ось вращения из вертикального положения до горизонтального, передавая движение от мотора на колеса. Корзина содержит ряд скользящих кубиков, чтобы уменьшить трение.

2. Запрограммируйте робота для перетаскивания.
Эта программа будет отображать цифры 3, 2, 1 перед включением двигателя на мощности 10 на 2 секунды.

Предложение
Прежде чем учащиеся приступят к исследованию, предложите им изменить параметры программы, чтобы полностью понять ее действие.

Тестирование робота-тягача
Используя эту модель, учащиеся должны провести исследование сил тяги.
1. Проводите исследование, добавляя сначала небольшие, а затем тяжелые предметы в корзину, пока устройство не остановится.
Потребуется около 300 г груза на обычной поверхности, чтобы остановить движущийся робот-тягач. Учащиеся могут использовать любой предмет, но не слишком тяжелый, так как целью этого этапа является достижение равновесия. На этом этапе учащиеся получают уравновешенные силы. Можно использовать стрелку, чтобы символизировать направление действия силы.
Можно также использовать небольшие шины в качестве объектов для
утяжеления корзины. Они увеличат трение со стороны корзины.
2. Используя то же количество кубиков, установите на модель большие шины и проверьте, что произойдет.
Учащиеся будут устанавливать шины на робот-тягач. Это приведёт к тому, что трение между колесами и поверхностью будет больше со стороны роботатягача, увеличивая силу тяги в том направлении. Система сразу же станет неуравновешенной.
Эти опытные данные подтверждают идею о том, что если сила тяги больше сил, действующих в противоположном направлении, объекты должны двигаться.
3. Найдите самый тяжелый объект, который может тянуть ваша модель, когда она оснащена шинами.
Этот последний этап будет зависеть от трения поверхности, на которой работают учащиеся.
Создание (дополнительно)
Используйте раздел .Дополнительные исследования. учебного проекта, чтобы расширить задание. Имейте в виду, что эти задачи выходят за рамки раздела «Исследование» и предназначены для старших или более подготовленных учащихся.
Дополнительное исследование
В роботе-тягаче, с которым работают учащиеся, используется коническая зубчатая передача, чтобы изменять направление вращения мотора. Это не оказывает существенного влияния на показатели движения.
- Соберите ещё один робот-тягач.
Предложите учащимся исследовать новые проекты для тяговой машины. Пусть они построят собственную модель, выполнят те же испытания, как и с первым роботом-тягачом, и сравнят результаты двух исследований. В поисках вдохновения просмотрите модели в Библиотеке проектирования.
Предложение для совместной работы
Выберите самую сильную машину в классе
После того как группы закончат испытания, организуйте перетягивание каната.
• Объедините группы в пары по две.
• Соедините роботов задними частями друг к другу цепью LEGO..
• Перед началом соревнования попросите группы поместить в
корзины равный груз.
• Необходимо запустить моторы по вашему сигналу, чтобы роботы
тянули в противоположные стороны. Кто сильнее?
Создание (дополнительно)
Используйте раздел .Дополнительные исследования. учебного проекта, чтобы расширить задание. Имейте в виду, что эти задачи выходят за рамки раздела «Исследование» и предназначены для старших или более подготовленных учащихся.
Дополнительное исследование
В роботе-тягаче, с которым работают учащиеся, используется коническая зубчатая передача, чтобы изменять направление вращения мотора. Это не оказывает существенного влияния на показатели движения.
1. Соберите ещё один робот-тягач.
Предложите учащимся исследовать новые проекты для тяговой машины. Пусть они построят собственную модель, выполнят те же испытания, как и с первым роботом-тягачом, и сравнят результаты двух исследований. В поисках вдохновения просмотрите модели в Библиотеке проектирования.
Предложение для совместной работы
Выберите самую сильную машину в классе
После того как группы закончат испытания, организуйте перетягивание каната.
- Объедините группы в пары по две.
- Соедините роботов задними частями друг к другу цепью LEGO..
- Перед началом соревнования попросите группы поместить в корзины равный груз.
- Необходимо запустить моторы по вашему сигналу, чтобы роботы тянули в противоположные стороны. Кто сильнее?

4. Обмен результатами
( 45+ минут )
Создание документа
Попросите учащихся задокументировать свой проект различными способами. Например:
- попросите их сделать снимок экрана с результатами;
- предложите учащимся сравнить эти изображения с реальными;
- попросите учащихся записать видео, описывающее их проект, и представить его в классе.
Предложения
Учащиеся могут собирать данные в формате диаграммы или таблицы.
Учащиеся могут также построить график результатов своих испытаний.
Представление результатов
В конце этого проекта учащиеся должны представить результат своих исследований.
Чтобы расширить презентации учащихся, выполните следующее:
- убедитесь, что учащиеся используют такие слова, как «уравновешенная сила», «неуравновешенная сила», «толкать», «тянуть», «трение» и «вес »;
- попросите их использовать стрелки для представления сил;
- попросите их изложить объяснение в контексте;
- попросите их проанализировать свои проекты с точки зрения реальных жизненных ситуаций, в которых они наблюдали уравновешенные и неуравновешенные силы;
- обсудите связь между их выводами и этими конкретными ситуациями.
Категории оценки проекта согласно ФГОС
Можно использовать эти категории оценки вместе с сеткой категорий
наблюдения, приведенной в главе «Оценка с помощью WeDo 2.0»
Исследование
На этапе исследования убедитесь, что учащийся активно участвует в обсуждении, задает вопросы, отвечает на них и правильно использует термины «тяга», «силы» и «трение».
- Учащийся не может дать ответы на вопросы, адекватно участвовать в обсуждении или описать идеи тяги, или соотнести их с силами.
- Учащийся с помощью подсказок может дать ответы на вопросы, адекватно
участвовать в обсуждении или с помощью учителя описать тягу как пример силы. - Учащийся может адекватно отвечать на вопросы, участвовать в обсуждении
в классе или описать тягу как пример силы. - Учащийся может дополнять объяснения в ходе обсуждения или подробно
описать понятие силы на примере тяги.
Создание
На этапе создания убедитесь, что учащийся работает в составе группы,
может делать прогнозы о том, что должно произойти, и может использовать
информацию, собранную на этапе исследования.
- Учащийся не может хорошо работать в группе, делать прогнозы о результатах исследования или использовать собранную информацию.
- Учащийся может работать в группе и прогнозировать с дополнительной
помощью ход исследования. - Учащийся с подсказками может собирать и использовать информацию,
работать в группе и участвовать в групповых обсуждениях, делать прогнозы и собирать информацию для использования в ходе презентации для объяснения материала. - Учащийся может работать в группе, выступать лидером и обосновывать прогнозы для объяснения силы тяги.
Обмен результатами
На этапе обмена результатами убедитесь, что учащийся может объяснить, что происходит с моделью с точки зрения силы, протестировал различные сочетания и может спрогнозировать другие результаты, а также может использовать важную информацию из своего проекта, чтобы создать итоговый отчет.
- Учащийся не может участвовать в обсуждении исследования, объяснить модель, используя концепцию силы, или использовать информацию для создания итогового проекта.
- Учащийся, с подсказками, может участвовать в обсуждениях исследования
сил, завершил несколько сценариев исследования для составления прогнозов и использует ограниченное количество информации для создания итогового проекта. - Учащийся может участвовать в обсуждениях исследования сил и использовать информацию, собранную в ходе исследования, для создания итогового проекта.
- Учащийся может активно участвовать в обсуждении в классе по данной теме и использовать собранную информацию для создания итогового проекта, который включает в себя дополнительные необходимые элементы.
5. Индивидуальный подход
Рекомендуется начать с этого проекта.
Чтобы обеспечить успех, можно предложить дополнительные рекомендации по сборке и программированию. Например:
- объясните использование моторов;
- объясните простые строки программы;
- объясните, как проводить исследование;
- определите факторы, на которых необходимо сосредоточиться, такие как силы тяги и трения.
Объясните доступно и четко, каким способом учащиеся должны представлять и документировать свои результаты (например, во время представления работ перед другими группами).
Дополнительное исследование
В качестве дополнительной задачи выделите время для экспериментов с использованием созданных учащимися конструкций, принципов сборки и программирования. Это позволит им исследовать дополнительные законы тяги.
Кроме того, попросите учащихся провести дополнительное исследование и сравнить силу своих роботов, соревнуясь в конкурсе по перетягиванию каната. Готовьтесь к азартной игре!
Ошибочные представления
Учащиеся могут полагать, что если что-то не движется, то на этот объект силы не действуют. Хорошим примером может послужить попытка перемещения автомобиля, стоящего на ручном тормозе. Поскольку автомобиль не двигается, учащиеся думают, что никакая сила на него не действует, но она есть. С научной_
В помощь преподавателю
Учащиеся смогут:
изучите, что такое силы, и как они заставляют предметы перемещаться;
создадите и запрограммируете робота для изучения результатов действия уравновешенных и неуравновешенных сил на движение предметов;
подготовите отчёт и представите свои выводы о силах.
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Создана модульная роботизированная рука
Человек управляет рукой с помощью перчатки, что позволяет точно контролировать движения манипулятора. Пальцы манипулятора могут легко быть сброшены. Это может быть полезн.

HAL-костюм - очередной провал?
Прикованному к инвалидному креслу 43-летнему японцу Сэйдзи Утида (Seiji Uchida) не удалось покорить 4164-метровую вершину Брейтгорн (Breithorn) в швейцарских Альпах с пом.
Рубрика: Инструкции к роботу LEGO MINDSTORMS NXT 2.0
робототехника для начинающих
Внимание! Юные робототехники! Для Вас мы подготовили страницу с простыми и понятными инструкциями к нашему любому конструктору NXT!
Скачивайте и собирайте модели роботов из конструктора версии 8547 (robot lego mindstorms nxt 2.0).
Внешний вид коробки и руководство пользователя к конструкторам LEGO Mindstorm NXT версий 8527, 8547 и 9797 (выпускались до 2013 года):
Пошаговые инструкции для сборки разных моделей лего роботов (для конструктора версии mindstorm 8547)
| Инструкция по сборке робота АЛЬФАРЕКСа (артикул набора 8547)  Время сборки 4 часа (2 человека в группе). Рекомендуемый возраст для занятия робототехникой детям - 12-14 лет | Робот крокодил  Робот - крокодил (робогатор) | Робот пятиминутка  | Бот-внедорожник  | Трёхколёсный бот  | Конструируем робота "Пятиминутку" за 5 минут ;-) | Собираем и программируем Бот-внедорожник. Это уже более серьёзная модель, использующая датчик касания. | Создаём и тестируем Трёхколёсного бота. У этого робота ещё нет датчиков, но уже можно писать средние по сложности программы для управления двумя серводвигателями. | Линейный ползун  | Исследователь  | Нападающий коготь  | Добавляем к "роботу пятиминутке" датчик цвета и получаем из него настоящего "Линейного ползуна" и получаем робот с ИИ начального уровня! | Всем хорош "Бот-внедорожник": манёвренный, бронированный, умный. Ему бы ещё ультра-зрение бы добавить. Добавляем! Встречайте: Исследователь - вот вам бот с искусственным интеллектом среднего уровня! | Хищный атакующий робот, содержащий коготь, которым он может ударить в цель. Собираем, тестируем! | МАНТИ - застенчивый богомол  | Шарикопульт  | Робот-база с тремя двигателями  | Удивительное существо: робот-богомол. Постройте, загрузите базовую программу, порадутесь и погрустите вместе с МАНТИ! | Интересный миниробот под названием "Шарикопульт" очень простой, но может быть использован как дополнение к любому другому роботу. | Базовый робот с тремя двигателями может пригодиться для получения навыков строительства собственных блоков. Так как в базовом роботе нет ни датчиков, ни спец.механизмов. Вы все это можете сделать сами! | Двух кнопочный пульт ДУ  | Продвинутый Молот-автобот  | Простой светомер из лего  | В данном уроке можно научиться собирать двух кнопочный пульт дистанционного управления любым роботом, собранным из конструктора лего миндстормз! | Новенький проект "Молот-автобот"- это сложный в сборке и программировании робот. Но итоговая модель автомобиля-робота с молотом позволяет использовать 3 двигателя и 2 датчика! | Эксперименты с данным светомером позволят научиться использовать датчик света в своих роботах. | Робот СЕГВЭЙ с наездником  | Измеряем растояние длиномером  | автобот: гоночная машина из лего  | Даже робота СЕГВЭЙ (SEGWAY) можно построить из набора 8547. Инструкция доступна при клике на картинку. | Простейшее дополнение к роботу позволяет измерять пройденное им растояние. В статье описано как создать очень удобного робота-длиномера из робота пятиминутки. | Замечательная разработка! Автомобиль, да ещё какой! Есть возможность и удалённого управления, и "мозги", позволяющие принимать решения, считывая цветные линии на полу! Можно скачать - это АВТОБОТ! | Пятикнопочный пульт ДУ  | Супер пульт ДУ  | Миниавто с 3-х пультом ДУ  | Пульт ДУ можно использовать практически в любом своём проекте. Единственное требование - наличие двух конструкторов lego mindstorms nxt 2.0 | Супер пульт ДУ то уже мега-навороченный вариант для управления гоночным автомобилием или любым другим роботом MINDSTORMS NXT! | Забавная игрушка - миниавтомобильчик с трёх кнопочным пультом дистанционного управления |
Комплект из 9-и инструкций по лего роботам (robot lego mindstorms nxt 8547) под общим названием:

Мультибот . Кликните на картинку или просмотрите конструкции, приведённые ниже:
 Транспортное средство Этот транспорт является базовым для последующих робототехнических машин. Научитесь быстро собирать его прежде чем начнёте собирать более сложные механизмы. |  Гусеничное транспортное средство Собирается после того как вы собрали транспортное средство. Робот подходит для соревнований на силовое перетягивание каната. | 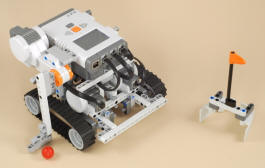 Гольфкар с лункой Собирается на базе гусеничного транспортного средства путём небольшой модернизации.
Роботы - убийцыДа, пришло время роботам взяться за уничтожение всего живого. С одной стороны это хорошо, ведь отпадет надобность использовать «живую силу» т.е. солдат в ведении боевых д.
ИсследовательРубрика: Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXTКонструктор Lego WeDoКонструктор Lego WeDo 2.0Программирование и алгоритмы для lego mindstorms nxt 2.0Соревнования роботов
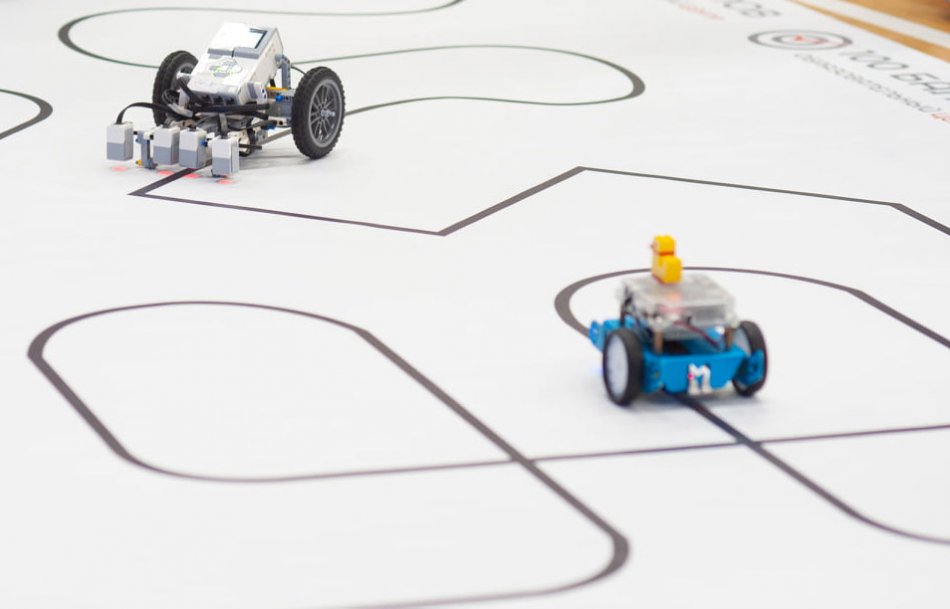
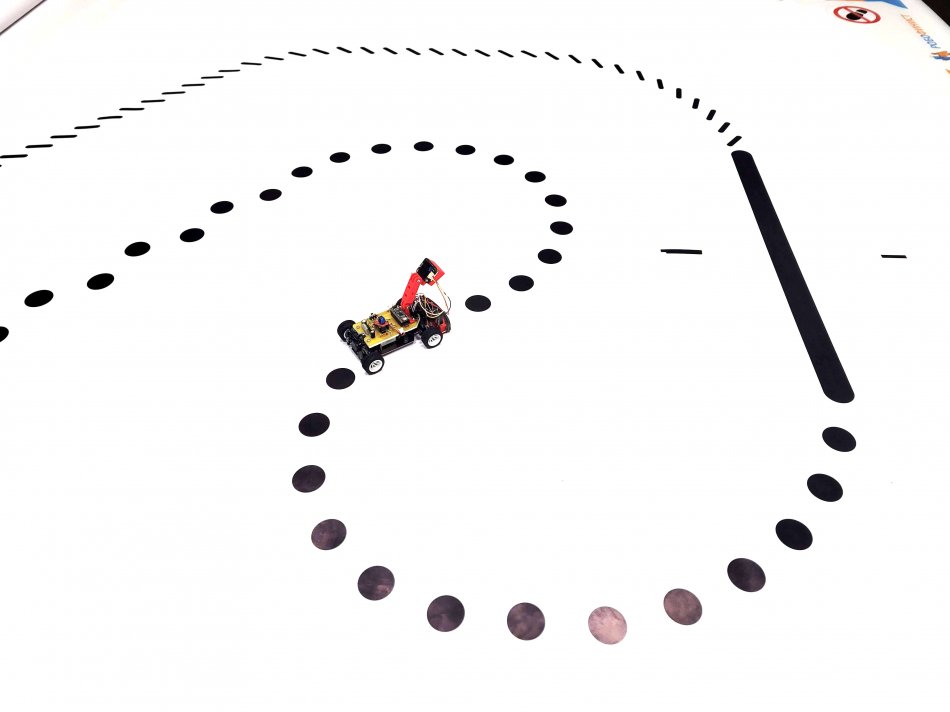
Поля для соревнований EV3, NXT и arduinoНиже представлены поля для подготовки и проведения соревнований по робототехники возрастных категорий: младшая, средняя, старшая. Рекомендуем использовать поля в школах, лицеях и центрах дополнительного образования детей для подготовки и проведения школьных или городских соревнований. Научив, конструировать роботов и создавать программы на этих соревновательных полях Вам будет гораздо проще перейти на ступеньку выше - подготовку и участие в районных, краевых / областных соревнованиях. Часто конструкция и программа робота частично подходит на крупных соревнованиях. Экономится огромное количество времени. Вместо того, чтобы с нуля конструировать машину и писать программу Ваши подопечные могут заняться только доведением своего творения до логического конца. Из личного опыта: при консультации с судьями они часто удивляются стремлению детишек уничтожить все наработки и сконструировать новое устройство . По их мнению - это лишняя трата времени. Более половины "горе конструкторов" не успевают за 1-2 дня соревнований создать что-либо новое. Это и понятно, ведь даже взрослый человек не сможет сделать профессиональную робототехническую машину в стрессовой ситуации и, одновременно сжатом по времени промежутке. Поэтому, мой Вам совет как учителю робототехники - тренировки , тренировки и ещё раз тренировки на этих полях. Вот залог успеха! Наши поля для робототехники скачать можно абсолютно бесплатно. Пользуйтесь, удачи Вам, робототехники!
Поле позволяет одновременно стартовать двум роботам. Правила соревнований предполагают, что робот должен пропустить соперника, находящегося на перекрестке. Размер поля: 2400 x 1200 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) В дисциплине Кегельринг задача робота - за наименьшее время вытолкнуть кегли за пределы черной линии. Банки расставлены внутри круга и, обычно, это банки из под напитков 0,33 л. оклеяные клеящей или цветной бумагой. В дисциплине Сумо побеждает тот робот, который вытолкнет соперника из зоны круга за пределы черной линии первым. Размер поля: 1250 x 1250 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Макет поля для отработки алгоритмов движения вдоль черной линии Поле в дополнение к перекрёсткам и извилистым линиям содержит блоки инверсной линии (белая линия на черном поле) и штриховую разметку. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время. Размер поля: 2440 x 1220 мм. Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Данное поле более сложное и содержит множество перекрестков и извилистых линий. В правилах соревнований победа присуждается за проезд по заданной траектории за наименьшее время. Размер поля: 2440 x 1220 мм. Файл поля в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader) Положения для проведения соревнований, конкурсов и высотавок по робототехникеМы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
Инструкции для MINDSTORMS NXT PDF (13 шт.)
Разное о MINDSTORMS
Инструкции к роботам LEGO TETRIXЧЕРТЁЖНИК
В Челябинске собирают ЛЕГО » Обзор выставок роботов
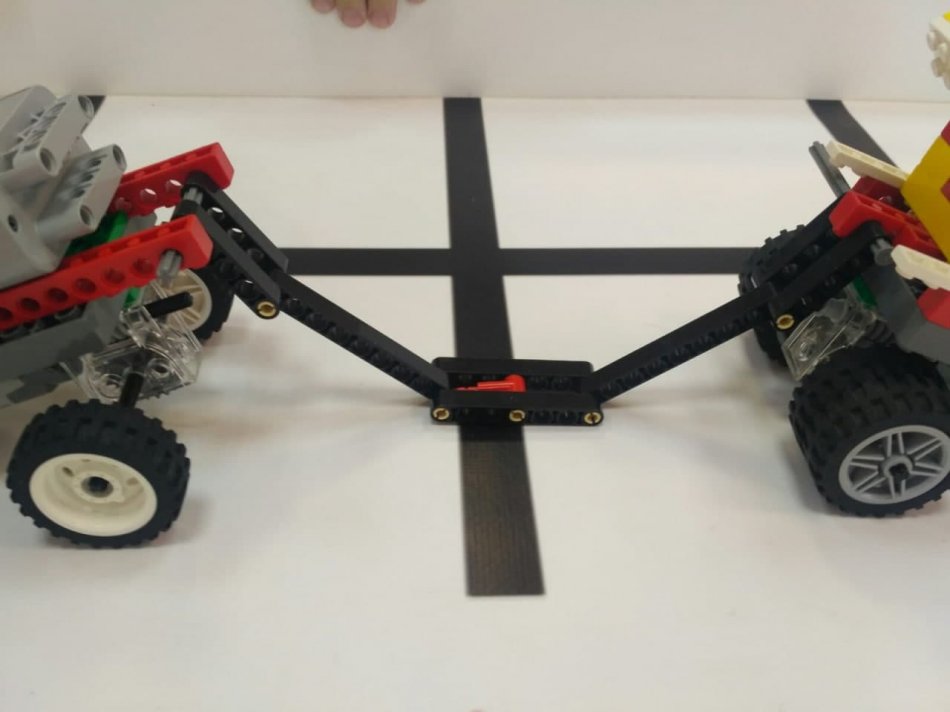
Поединок «перетягивание каната» проводится между двумя командами. Каждая команда выставляет на поединок одного робота. Поле представляет собой стол с нанесенной на его поверхность разделительной полосой. В качестве каната будет использоваться жесткая сцепка из деталей Lego Technic.
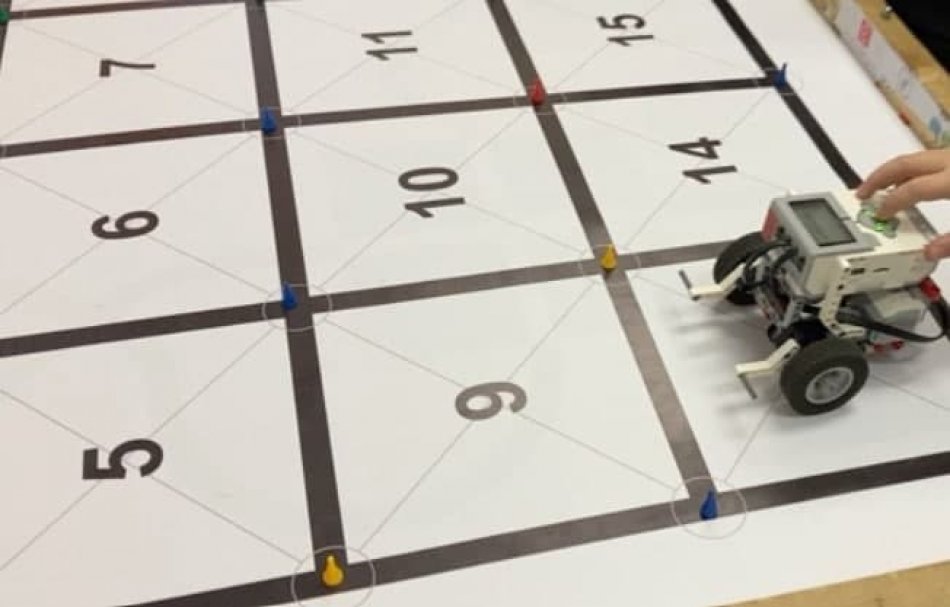
2 . Пятнашки
Категория для учащихся начальной ступени обучения робототехнике (до 11 лет, включительно) на образовательных наборах LEGO Mindstorms EV3®. Помогите роботу за кратчайшее время «собрать» максимальную сумму баллов на поле из 15-ти клеток. Максимальное время прохождения дистанции - 2 минуты.
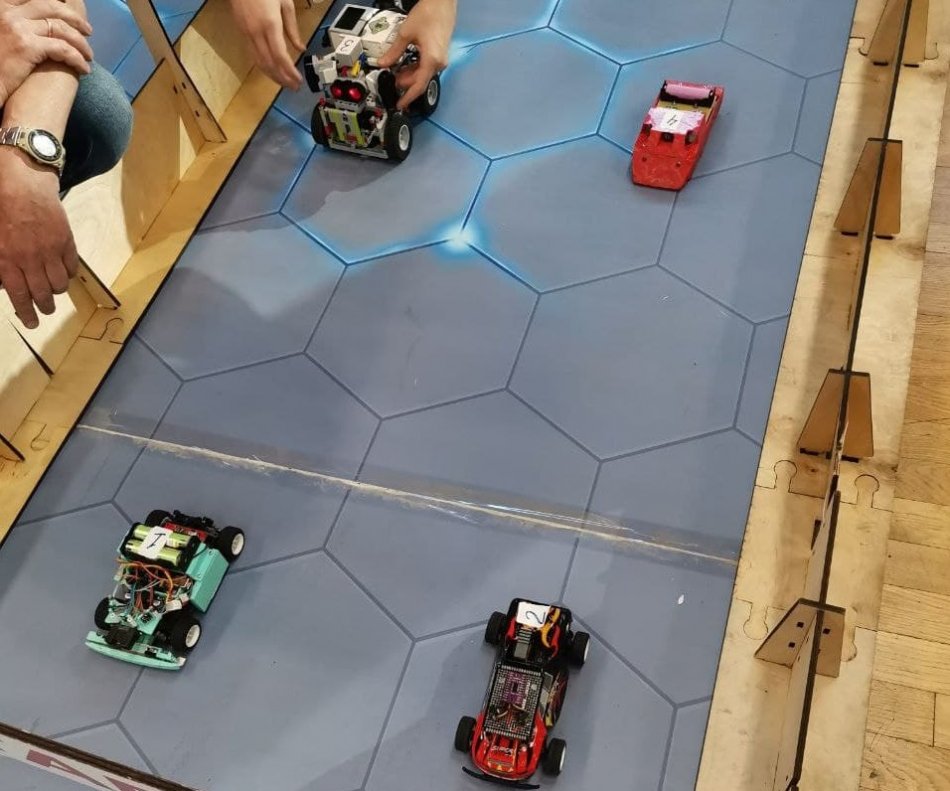
3 . Roborace. PRO
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
4 . Roborace. PRO mini
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
5 . Roborace. Образовательные конструкторы
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
6 . Roborace. Образовательные конструкторы. Junior
Соревнования Roborace во многом похожи на соревнования Формулы 1, но с тем отличием, что соревнуются не управляемые пилотами болиды, а полностью автономные роботы. Роботы полагаются на показания своих датчиков, чтобы ориентироваться по трассе (ограниченной бортами), маневрировать, выбирать скорость движения и избегать столкновений с соперниками.
7 . Следование по линии. PRO
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме.
8 . Следование по линии. Юниоры
Задачей для робота в этом виде является преодоление трассы вдоль черной линии за наименьшее время. Робот должен ехать по черной линии в автоматическом режиме.
9 . Следование по линии. Образовательные конструкторы
10 . Линия Профи. Computer Vision
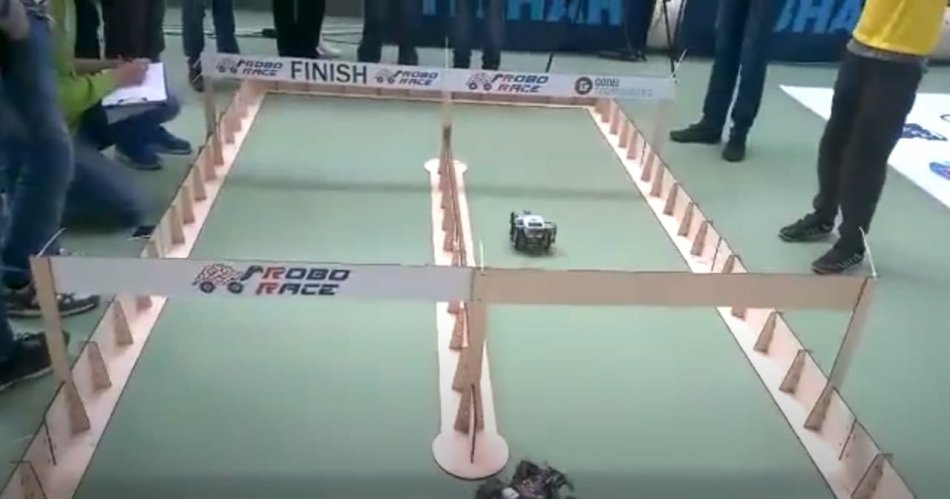
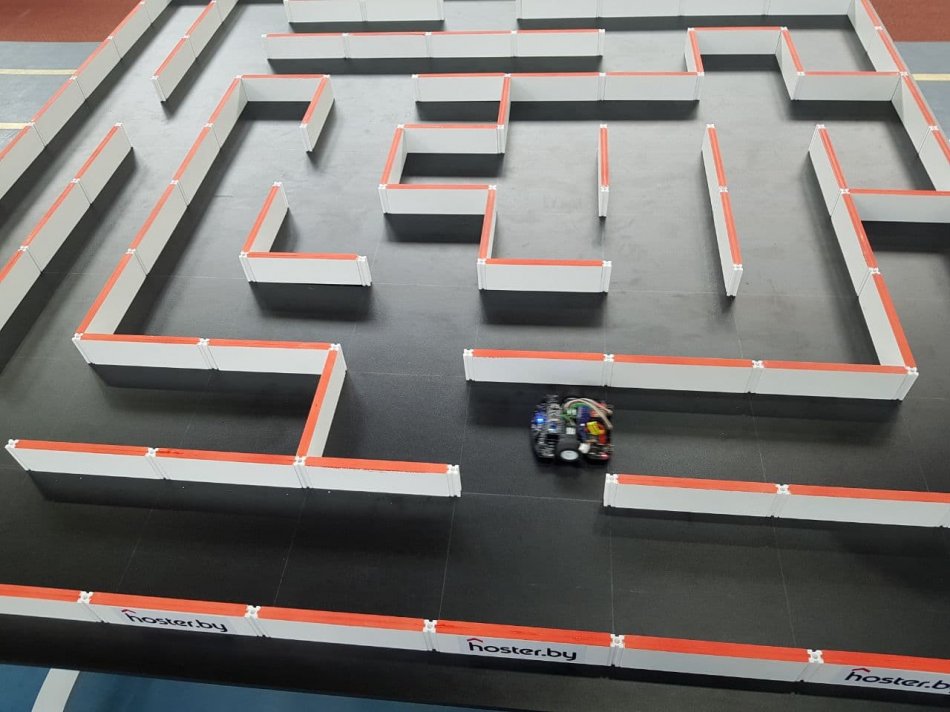
11 . Лабиринт
В этом виде состязаний участникам необходимо подготовить автономного мобильного робота, способного наиболее быстро добраться из одного конца лабиринта в другой. Конфигурация лабиринта заранее не известна участникам.
12 . Большое путешествие: младшая категория
«Большое путешествие» — это дисциплина, составленная из нескольких классических упражнений, которые робот должен выполнить последовательно и без остановки. За пять минут роботу предстоит: проехать по линии, обогнув препятствие, преодолеть лабиринт, линию с горкой, а также выбить все банки в кегельринге.
13 . Большое путешествие: старшая категория
«Большое путешествие» — это дисциплина, составленная из нескольких классических упражнений, которые робот должен выполнить последовательно и без остановки. За пять минут роботу предстоит: проехать по линии, обогнув движущееся препятствие, преодолеть лабиринт, линию с инверсией, а также выбить все банки в кегельринге, кроме одной. Оставшуюся банку необходимо вернуть на старт, пройдя все препятствия в обратном порядке. Побеждает тот, чей робот набрал наибольшее количество баллов при прохождении трассы.
14 . Программируемые дроны
Соревнование состоит из полетного задания. Задача пилота - показать свои навыки программирования БПЛА на прохождение трассы с препятствиями за минимальное время. Прохождение трассы считается засчитанным, если автономный БПЛА не сбился с заданного курса. Задача БПЛА - за минимальное время пройти трассу от места старта до места финиша, преодолев как можно больше препятствий с наименьшим количеством штрафных баллов. Победителем является команда, набравшая максимальное количество баллов по итогам результатов двух полетных заданий.
15 . Футбол управляемых роботов 4х4
Участникам футбола управляемых роботов 4×4 предстоит проявить себя не только в конструировании роботов, но и продемонстрировать сплоченную командную работу. На поле соревнуются 8 роботов, каждым из которых управляет участник. Полигон представляет собой уменьшенную копию настоящего футбольного поля. Задача каждой команды – забить наибольшее количество голов в ворота соперника. © 2019-2022 Федерация Спортивной и Образовательной Робототехники
Тотальная автоматизация и развитие искусственного интеллекта приведут к тому что многие профессии, в будущем будут не нужны. Везде, где машина может заменить человека - она его заменит. Самыми востребованными специалистами станут те, кто будут создавать и программировать эти машины. Дайте своему ребенку возможность попробовать себя в этой роли уже сейчас! Сначала мы позвали самых крутых IT Специалистов, практиков, разработчиков. Потом, нашли опытных методистов, детских психологов и педагогов. Соединили знания первых с компетентностью вторых и получили образовательные курсы, аналогов которым нет на рынке!
Занятие 1: Робофутбол. Занятие 1: Вводное занятие. Знакомство с конструктором. Конструирование модели подъемник. Изучат работу мотора. Познакомятся с ПО и запрограммируют подъемник на движение. Занятие 11: Робот – погрузчик. Продолжат знакомиться с набором Lego EV3; Соберут модель «Ворота»; Продолжат работать со средним мотором; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран); Занятие 31: Дети доделывают проект, вносят коррективы. Защищают проекты перед родителями. Занятие 32: Итоговый тест. Cертифицированный педагог Lego Education, диплом с отличием ГАОУ ВО МГПУ Институт СПО им. К.Д. Ушинского, специальность «Дошкольное образование». Читайте также:
|