
Лего совершить в управление
Обновлено: 25.04.2024
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
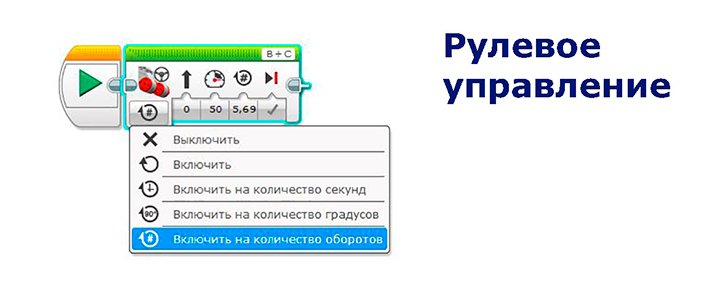
Программа для Lego EV3 для движения робота на заданное количество оборотов.
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
рулевое управление движение по прямой на один метр
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.

робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
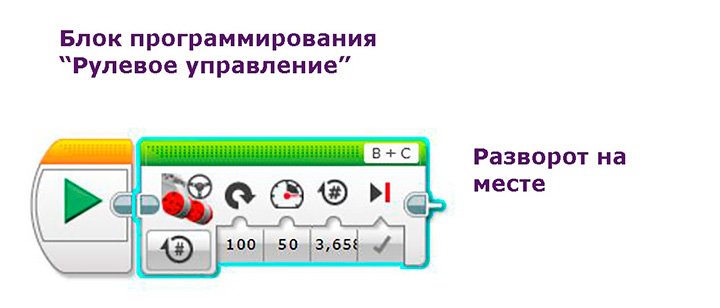
Разворот на месте
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
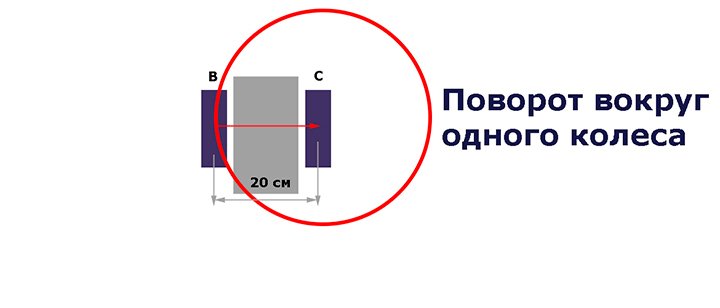
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
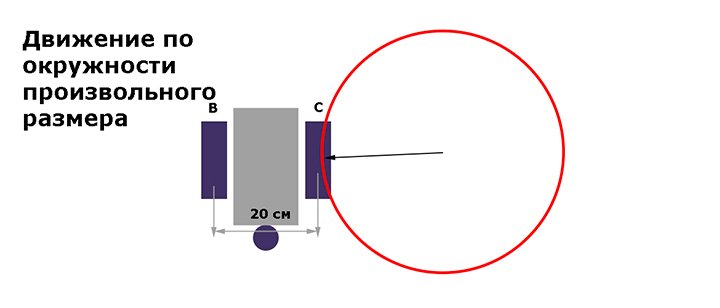
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
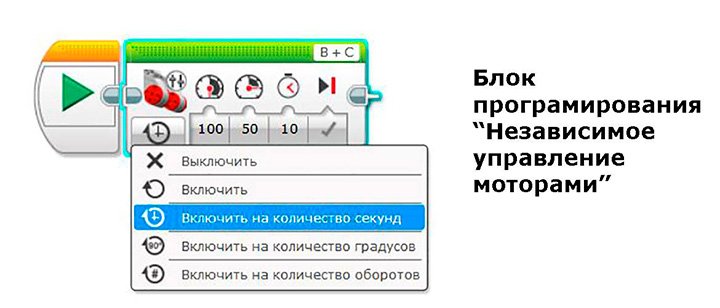
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Теперь и дети, и взрослые смогут дистанционно управлять некоторыми из моделей Technic, как никогда раньше! Это бесплатное приложение открывает вам мир реалистичных элементов управления и эксклюзивных функций, представленных на настраиваемых приборных панелях. В приложении больше автоматизации, и вас ждут реалистичные звуки, игровые испытания, а также данные от модели, поступающие в реальном времени. Еще хоть немного реалистичности — и модели бы ездили по дорогам.
Загрузите приложение здесь:
Наборы CONTROL+ для детей и новичков
В этих сложных наборах вас ждут непростые задачи по сборке. Вы будете создавать превосходные моторизованные машины с продвинутым дистанционным управлением, обеспечивающие часы веселья и игры.
Жмите на газ!
Грузовик Mercedes-Benz Zetros 4x4 с дистанционным управлением (42129) Смотрите, как с помощью CONTROL+ ваш ребенок подвергает эту могучую машину самым серьезным испытаниям! Приложение позволяет блокировать дифференциал грузовика для преодоления самых крутых склонов, а также предлагает множество испытаний и достижений для бесконечной игры!
Быстрый на дороге. Еще быстрее без.
Багги-внедорожник (42124) Этот великолепный набор создан в духе прежних машинок на радиоуправлении, но с CONTROL+ он приобрел современный вид! Дети могут использовать приложение для тонкой настройки всего, что связано с их багги, — от звуков, которые он издает, до калибровки колес перед выполнением невероятных трюков!
Водите как Стиг
Гоночный автомобиль Top Gear на дистанционном управлении (42109) Включайте высшую передачу! Воспроизводите звуковые эффекты, получайте данные от модели в реальном времени и смотрите, как ваш ребенок совершенствует навыки вождения, управляя гоночным автомобилем на дистанционном управлении, как ему захочется!
Когда 4х4 уже недостаточно.
Самосвал Volvo 6х6 (42114) Маневрировать этой громадиной лучше всего с помощью CONTROL+! Проходите различные испытания, переключайте передачи и даже опрокидывайте кузов всего несколькими касаниями!

На Хабре есть два типа статей про робототехнику компании Лего: условно «хейтерские», с лейтмотивом «Lego не нужен» и от самой компании Лего. Оправдано это, или не очень – тема отдельной статьи, но, по всей видимости, в Лего понимают, что робо-конструкторы становятся все более востребованными и нужно быть гибче, если не хочешь полностью потерять эту нишу. До сих пор на рынке были представлены два основных набора: это Mindstorms EVE3 и WeDo 2.0. Что изменилось и чем Boost круче? Я попробую сравнить «новичка» с этими двумя решениями, что бы вы поняли, насколько Лего продвинулись вперед.
Итак: WeDo 2.0
Из «умных» компонентов: смартхаб, мотор и пара датчиков (расстояния\наклона), при том, что одновременно подключить можно только мотор и один датчик, либо два датчика и… все. Не густо. Лего объясняет это тем, что при должной фантазии даже на этом наборе компонентов можно реализовать «сотни проектов» (продолжение риторики о том, что три стандартных «кирпичика» лего можно соединить1060 различными способами… Интересно, что на эту сентенцию скажет ребенок, которому предложат поиграть тремя кирпичиками?) и действительно – методические материалы серии education предлагают довольно много различных «поделок», но… 12 000 рублей минимум. Это видимо какие-то нюансы лицензирования, может быть – софта и методических материалов, но факт остается фактом – ОДИН МОТОР!
Вопрос на засыпку: можно ли собрать на одном моторе нечто, способное двигаться и поворачивать? (Ответ: можно.)
Что же Boost? Ну, формально тоже самое, даже меньше: база (продвинутый смартхаб), мотор и датчик (один!).

Но дьявол кроется в деталях: Один датчик – это на самом деле интегрированные два: датчик препятствий и датчик цвета/освещенности (почти три!). Кроме того, база имеет встроенный гироскоп. Таким образом Boost по датчикам умеет все то же самое, что WeDо, плюс цвет. И что важно – одновременно! А еще база имеет два встроенных ходовых мотора, т.е. с дополнительным моторов– три! И все это, повторюсь, одновременно – нет нужды выбирать – моторы или датчики – все сразу. Это уже качественное превосходство – в разы. При этом Boost в два раза дешевле WeDо (ну, почти… На момент написания статьи можно найти по 7000-7500). Возможно потому, что не относится к серии education.
Так что же Mindstorm EV3? Потенциально — крутая штука.

До 4-х моторов плюс до 4 датчиков (а по факту на первом порту быстрый I2C, что позволяет хаб и почти не ограниченные возможности расширения), экран (вывод мимики – вполне себе востребовано), динамик (эх…), USB (с возможностью подключения WiFi, хоть и из весьма скромного списка совместимого оборудования) – в общем полный фарш. В теории. На практике в базовом наборе (31313) моторов 3 – два больших, один маленький… Прям как в Boost – два ходовых и дополнительный, только в Boost все будет ГОРАЗДО компактнее. А по датчикам? По датчикам тоже не очень: их громко заявлено три, но один из них – кнопка. Цвет и ик-дальномер – это два разных датчика. И… Все. Гироскопа в 31313 нет: или покупай отдельно, или – прощай самобалансирующие модели! Как видно Boost впереди – вместо кнопки – целый гироскоп. Цвет и дальномер примерно эквивалентны интегрированному датчику из Boost. Ну да – в Mindstorm еще есть ИК маяк, он же пульт ДУ. Но его применение в эпоху ориентации на смартфон/планшет весьма ограничено. А цена… Ну можете погуглить – минимум в 3 раза дороже Boost!
Еще мне показалось плюсом большая ориентированность Boost на Лего Classic, а не на серию mechanic technic, как у Mindstorm… Дело в том, что механизмы – штука крутая, но ребенку (а все мы помним, что это все-таки детский конструктор?) хочется больше в игру. Техник — он для механизмов, а классик – для творчества. Кроме того, Boost без проблем совместим с обеими «технологиями».
А еще, чтобы подружить Boost с планшетом, нужно просто нажать зеленую кнопку. Mindstorm требует создания пары, по-разному работает с apple/android девайсами (нужно проводить настройку в самом блоке), и периодически теряет соединение так, что требуется перезагрузка блока! С Boost у меня пока не так много практики, но проблем еще не было – все работает и доступно ребенку пяти лет.
Взаимодействие с Boost ребенка реализовано в виде непрерывного процесса в сопутствующем приложении. Сначала нужно собрать модель по прилагаемой инструкции. Потом включить (одна зеленая кнопка, помните?) и игрушка сразу оживет! Предыдущие серии требовали программирования, чтобы начать играть. Здесь программирование – элемент игры.
Неужели все идеально? Ну, может не совсем, но на твердую четверку с плюсом! Немного расстроило отсутствие в блоке динамика. При достаточно обширной коллекции звуков, и приемов работы с ними, все это реализовано на сопрягаемом устройстве, а не в базе. А хотелось бы, что бы робот разговаривал сам. Без дисплея можно обойтись (тем более, что основная модель – робот Верни, вполне годно реализует мимику с помощью дополнительного мотора), а без динамика не очень. С другой стороны – приложение запускается на телефоне, и если телефон запихнуть в робота, то… ;) Короче – есть варианты!
Возможностей расширения в плане электронных компонентов нет от слова «совсем»: портов на базе два и оба нужны под существующие модули. Однако имеющихся вполне достаточно, а совместимость практически со всеми наборами лего значительно расширяет границы юзер-кейсов в плане механики.
Таким образом Boost – серьезная заявка на победу. Цена позволяет конкурировать с аналогами (вроде продукции Xiaomi), а качество как всегда на высоте. Надеюсь на продолжение в том же духе!
Disclaimer: статья не проплачена и не ангажирована. Хотелось бы конечно получить наборчик нахаляву, но нет – куплен за свои, кровные… ;) Как и Майндсторм в свое время.
UPD1: drobzik в комментариях указал на серьезное отличие, которое от части проливает свет на разницу в цене Mindstorm и Boost: «роль мозгов в Boost выполняет мобильное устройство». Действительно — в Ev3 мы имеем полноценный комп под юникс и программа перед исполнением загружается на устройство, после чего может быть запущена автономно. Boost без телефона/планшета не работает совсем. Хорошо это или плохо — вопрос. Все-таки производительность современных телефонов растет по экспоненте, и телефон в роли мозга робота выглядит вполне логичным.
UPD2: nikolayv81 в комментариях указывает на то, что проблемы с производительностью возможно имеют место быть… Не до конца понятно — это канал связи, или неоптимизированность самого решения на устройстве, но параллельные процессы с интенсивной обратной связью могут не успевать обрабатываться с приемлемой скоростью. Возможно более быстрое устройство не дает таких проблем, возможно поможет оптимизация софта, но если для вас цель покупки — не совсем уж начальное освоение робототехники, а нечто более серьезное, это стоит иметь ввиду.
UPD3: Lego официально выложила документацию на BLE протокол для Boost (ну там не только буст, там смартхаб WeDo и еще какие-то решения от них). Таки образом, пользователи больше не ограничены средой разработки Лего и могут писать программы на любом языке. Кейсы использования так же значительно расширяются!
-
— библиотека для Python. — интерфейс для node.js. — расширение BLE для App Inventor 2, что в сочетании с открытой спецификацией интерфейса, позволяет делать программы управления Boost под андроид, с использованием, например, голосовых команд.
UPD5: Собственно готовый пример под App Inventor 2 — управление Верни со смартфона.
В оранжевой закладке палитры редактора Lego EV3 находятся блоки «Управление операторами». Это алгоритмические структуры, без которых невозможно создавать программы. С их помощью происходит запуск кода, переключение, прерывание, зацикливание и прочее. Еще их называют блоками последовательности действий. В верхней части пиктограмм расположена узкая оранжевая горизонтальная полоса.

блоки управления операторами Lego Education EV3
Всего во вкладке «Управление операторами» находится пять иконок слева направо:
- Начало
- Ожидание
- Цикл
- Переключатель
- Прерывание
«Начало»
Он всегда расположен в начале и служит для запуска программы на выполнение. На пиктограмме изображена стрелка зеленого цвета. Без него код работать не будет и другие значки не будут активными. В окне редактора если значка «Начало» нет или он не соединен с другими, остальные фрагменты программы выглядят немного замутненными.

программный блок «Начало»
Если добавить еще одну или несколько пиктограмм «Начало» в окно редактора Lego, то можно создать несколько параллельных программ, работающих независимо друг от друга. При отладке каждую подпрограмму можно запустить отдельно. Но при запуске на выполнение все параллельные ветки работают одновременно и автономно.
«Ожидание»
На значке нарисованы песочные часы. С помощью ожидания можно ждать наступления какого-нибудь события. Если это событие наступит, то происходит переход программы к другой части.
Всего есть тринадцать вкладок с типами сенсоров, кнопками, счетчиками и т.д. в блоке ожидания EV3:
У каждой закладки есть режимы сравнения, изменения или обновления, которые имеют свои подпункты. В целом это мощный инструмент, позволяющий создавать сложные программы, зависящие от конкретных условий.
Для того чтобы повторить нужную последовательность кода определенное число раз при соблюдении нужных условий в редакторе Lego Education EV3 предусмотрен программный блок. Фактически он представляет собой контейнер с визуальным кодом. Проверка условий происходит после однократного выполнения кода. Конструкция «Цикл» является алгоритмической структурой типа «while» с постусловием.
Фрагмент программы внутри контейнера будет повторяться. Блоки, не входящие в него повторяться не будут. По завершению произойдет переход к следующим блокам, которые не входят в цикл. Иконка цикла расположена третьей по счету слева во вкладке «Управление операторами». Управление режимами находится в правом нижнем углу пиктограммы.

программный блок «Цикл» Lego Mindstorms-EV3
Всего есть шестнадцать закладок. Тринадцать из них такие же, как и у блока «Ожидание». Добавлены еще три пункта:
- Неограниченный
- Подсчет
- Логическое значение
В левой части иконки расположен вывод «Параметры цикла». С его помощью можно выполнить подсчет числа повторений, времени, логического значения, типов сравнения, порогового значения и прочее. Введенное значение зависит от заданного режима или от переданного по шине данных значения от выводов других блоков.
Циклы можно вкладывать друг в друга. Если в конструкцию добавляются фрагменты, то размер значка увеличивается. Также размер пиктограммы можно изменять с помощью маркеров, находящихся на границах изображения. Это очень похоже на изменения размера картинки в документе Word.
«Переключатель»
Находится четвертым слева в оранжевой закладке алгоритмических структур. По сравнению с циклом у него на одну вкладку меньше. Отсутствует пункт «Неограниченный». Он соответствует конструкции «if»… «else» или «если»… «то».

блок «Переключатель» Lego EV3
«Переключатель» может включать в себя 2 и более последовательности блоков. Эти последовательности называют вариантами. В зависимости от выбранной закладки определяется входное значение сенсора или какого-нибудь параметра. Исходя из входного параметра запускается только один из возможных вариантов.
Если нужно чтобы проверка вариантов выполнялась несколько раз, «Переключатель» нужно поместить в циклический блок.
«Прерывания цикла»
Это последний пятый значок во вкладке «Управление операторами». Он предназначен для завершения циклического блока. Имя прерывания выбирается в верхней части пиктограммы и больше никаких настроек нет.

программный блок «Прерывание цикла»
«Прерывание цикла» можно использовать по условиям, можно прерывать цикл, находящийся в цикле, из другой подпрограммы или ветки. После остановки последовательности начнут выполняться блоки, расположенные после циклического.
Для одновременного управления двумя моторами Lego EV3 в зеленой палитре блоков программирования существует два блока:
Блок «Рулевое управление»

Рулевое управление
Блок «Независимое управление моторами»

Независимое управление
Блок рулевого управления третий слева в блоках «Действия» палитры блоков EV3. Блок независимого управления четвертый по счету. Режимы управления у блоков одинаковые. Всего есть пять режимов работы:
Эти пять режимов аналогичны режимам работы среднего и большого мотора и подробно описаны в статьях «Большой мотор EV3» и «Средний мотор EV3», поэтому останавливаться на режимах работы и режимах остановки не имеет смысла.
Блок программирования «Рулевое управление»
При помощи блока «Рулевое управление» робот может двигаться вперед, назад, по траектории, останавливаться. При рулевом управлении моторы могут передвигаться со скоростями от – 100 условных единиц до 100 условных единиц. Это позволяет моторам вращаться в разных направлениях.
Есть два входных параметра для управления блоком – мощность и рулевое управление.
Эти значения можно указывать непосредственно на блоке. Также можно задавать значения при помощи проводников. Такое управление часто используется для соревнований автономных роботов.

Параметры входа
Максимальную скорость моторов можно задать любую. Значения рулевого управления, т.е. повороты, задаются ползунком. На рисунке приведен пример, где скорость или мощность равна 50 условных единиц, а значение рулевое управление установлено 20 условных единиц.
Это значит, что максимальная скорость левого мотора будет 50, а правого меньше. При таких заданных значениях робот совершает правый поворот. Если изменять положение ползунка, то будет изменяться вид стрелки и значение рулевого управления. Можно сказать, что блок «Рулевое управление» напоминает рулевое управление обычных автомобилей.

значение рулевое управление
Отличие заключается в том, что в обычном автомобиле поворот осуществляется за счет поворота колес при одинаковой скорости ведущих колес, а у роботизированной платформы поворот происходит за счет разной скорости моторов.
Недостатком такого управления является трудность вычисления угла поворота. Поэтому часто значение рулевого управления подбирается опытным путем.
Блок программирования «Независимое управление»
В этом блоке реализована возможность одновременного управления двух моторов с одинаковой скоростью или различными скоростями. Выбор порта для моторов происходит, если щелкнуть по букве в верхней части блока.

выбор порта выхода
Если у нас левый мотор подключен к порту В, а правый к порту С, то при значениях В = 100 и С = -100 происходит разворот на месте в правую сторону с максимальной скоростью. При В = 100 и С = 0 робот поворачивается вокруг правого неподвижного колеса. При В = 100 и 0 < С < 100 происходит движение роботизированной тележки по дуге.

повороты «Независимое управление»
При помощи этого блока можно легко задавать траектории движения и точно вычислять радиусы разворотов. Блок «Независимое управление» моторами очень похож на управление танком, трактором или любой другой техникой где повороты осуществляются за счет разных скоростей левых и правых гусениц или колес.
Читайте также: