
Объезд препятствия lego ev3
Обновлено: 15.05.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Изучаем ультразвуковой датчик
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego Mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.


Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах - от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов). Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов.
У нашего робота, собранного по инструкции, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача 1: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.


Решение
Если мы хотим чтобы робот выполнял данную программу постоянно, следует добавить цикл и внести некоторые усовершенствования в виде разворота

Задача 2. написать программу для робота, держащего дистанцию в 15 см от препятствия.

Задача 3. Объезд препятствия

Теперь если мы захотим чтобы робот выполнял данное действие постоянно. Добавим цикл и создадим условие.

Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим "Присутствие/слушать". В этом режиме датчик не излучает ультразвуковые импульсы, но способен обнаруживать импульсы другого ультразвукового датчика.
Результатом обнаружения является логическое значение: "Да" , если найдено ультразвуковое излучение, или "Нет" , если ничего не найдено. Данный режим можно использовать, например, в состязаниях роботов-шпионов (описание режима уже говорит о том, что для его использования необходимо минимум два робота).
Предлагаю проверить, как работает данный режим. Для этого потребуется написать следующую программу:
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
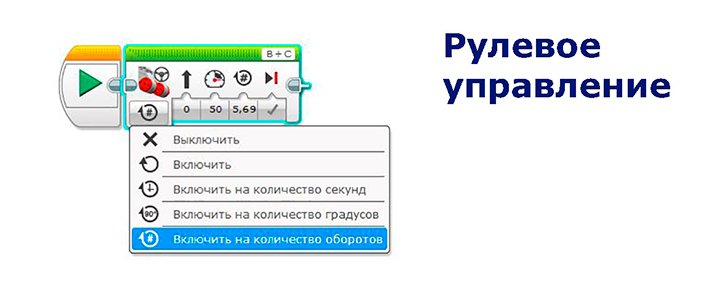
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
рулевое управление движение по прямой на один метр
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.

робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
Разворот на месте
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или — 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
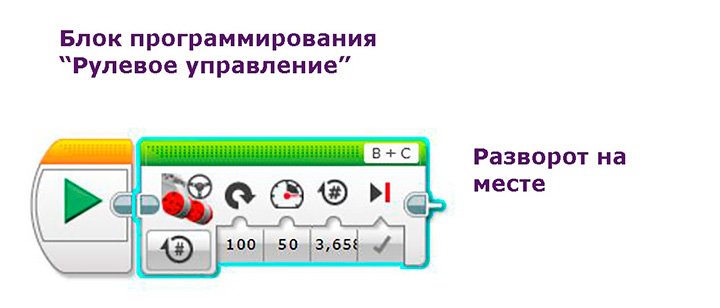
разворот робота на месте рулевое управление
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
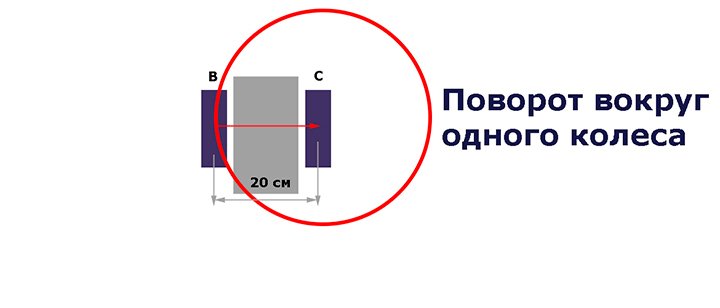
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
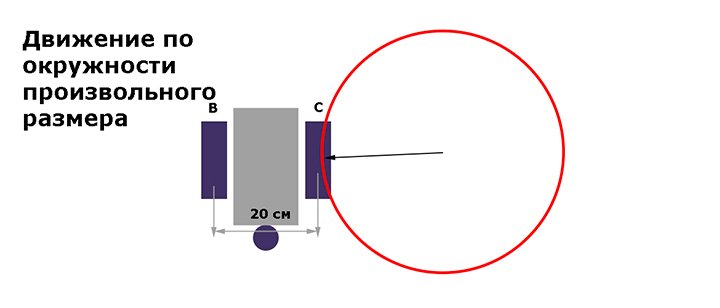
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
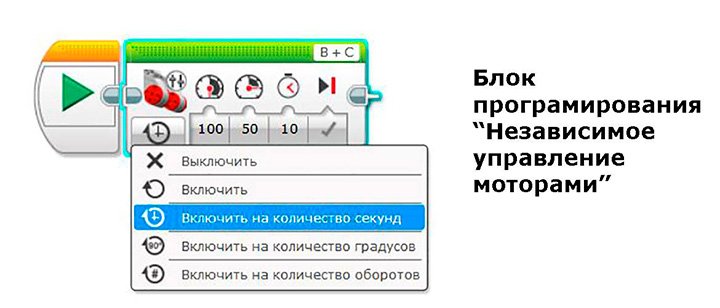
Независимое управление моторами Lego EV3 произвольная окружность
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Одним из часто встречающихся видов соревнований является соревнование “Движение робота вдоль черной линии”. В последнее время активно развивается робототехника, открывается множество кружков. Как следствие проводится множество соревнований и конкурсов по робототехнике различного уровня. Это направление называется соревновательная робототехника.

Это соревнование проводится в разных номинациях и категориях. Есть движение по широкой линии (5 см), по узкой линии (1,5 см), включают в движение по линии участки с прерывистой линией. Часто еще используется объезд роботом препятствий (например объезд кирпича) или преодоление препятствий (например, качающийся мост). После преодоления препятствий робот должен вернуться на линию и успешно финишировать.
Так как сейчас есть много типов робототехнических конструкторов, то соревнования также разделяют по категориям. Т.е. движение по линии Lego EV3, отдельно движение по линии Arduino и т.д. Побеждает робот, преодолевший дистанцию за минимальное время не потеряв трассу.
Алгоритмы движения робота
Есть несколько основных алгоритмов движения робота вдоль черной линии с использованием различных типов регуляторов:
- Релейный регулятор
- Пропорциональный регулятор
- Пропорциональный дифференциальный регулятор
- Кубический регулятор
- Пропорциональный интегральный регулятор
- Пропорциональный интегральный дифференциальный регулятор
Можно использовать эти алгоритмы с применением одного, двух, трех и даже четырех датчиков цвета. Количество применяемых датчиков зависит от сложности соревнований и каждый раз подбирается индивидуально..
Зрение робота EV3
Робот EV3 не обладает зрением и может воспринимать информацию о линии при помощи датчика цвета EV3.

Робот и человек по разному видят черную линию. У человека границы черного и белого четко различимы. Робот же видит размытую картину границы черного и белого. Для того, чтобы более точно определить линию, датчик робота должен быть расположен на границе черной линии и белого поля посередине.

При этом высота расположения датчика над линией должна быть около 1 см. Но это рекомендуемая высота. На соревнованиях встречаются различные варианты расположения датчика и подбираются они участниками индивидуально.
Калибровка датчика цвета
Для того, чтобы применить указанные алгоритмы нужно откалибровать датчик цвета на реальном поле. Есть два способа калибровки:
- ручной способ — все вычисления проводятся самостоятельно
- автоматическая калибровка — вычисления производятся при помощи блоков операций с данными
Датчик работает в режиме отраженного света. Суть метода состоит в том, что мы находим пороговое значение белого и черного цвета.
На практике нужно измерить значение белого цвета, затем черного цвета, суммировать их и разделить на два. Т.е. если обозначить пороговое значение буквой C, значение белого цвета буквой A и значение черного цвета буквой B, то формула будет выглядеть следующим образом:
С = ( A + B ) / 2
Измерить значение белого и черного цвета можно просто поочередно расположив датчик над белой и черной линией и записать значения.
Ручной режим калибровки датчика цвета EV3
В ручном режиме делается это просто, при помощи меню, расположенном на экране блока Lego EV3. Для этого нужно на экране блока EV3 зайти в третью вкладку и открыть первое приложение из пяти. Это приложение называется представление порта.
Здесь можно быстро посмотреть к какому порту присоединены датчики или сервомоторы. При помощи кнопок управления микроконтроллером EV3 нужно перейти к любому из занятых портов, и тогда можно посмотреть текущие показания, которые в данный момент получены с сенсоров или сервомоторов.
Для примера установлю датчик цвета в порт под номером 3 и сниму показания на белом поле.

На экране блока EV3 отобразилось показание в 43 условных единицы. Таким же образом определяем показания датчика на черной линии. Например показания будут 3 условных единицы. Подставляем эти значения в формулу.
С = ( A + B ) / 2 = (43 + 3) / 2 = 46 / 2 = 23
В результате получаем пороговое значение 23 условных единицы.
Автоматическая калибровка датчика цвета
Таким же точно образом измеряем пороговое значение (его еще называют значение серого) при автоматической калибровке, но на этот раз значение записывается в переменную. Назовем переменную, например, porog. В среде программирования Lego EV3 пишем программу для калибровки.

В первой части программы нужно расположить датчик над белым фоном. Датчик касания расположен в 1 порту. В программе используется блок ожидания действия с датчиком касания. В данном случае установлен параметр “щелчок” — цифра 2 в нижней части блока ожидания. Т.е. нужно нажать и отпустить кнопку датчика.
После этого датчик цвета в режиме отраженного света измеряет значение белого цвета и значение записывается в переменную A.
Во второй части программы нужно расположить датчик над черной линией и также нажать на кнопку датчика касания. Значения черного цвета записываются в переменную B.
В третьей части программы мы считываем значения датчиков из переменной A и B и передаем их значения в блок математики, который находится в режиме “Дополнения”. В этом блоке происходит вычисление по формуле С = ( A + B ) / 2 ирезультат вычисления записывается в переменную С.
Теперь значение переменной С можно использовать в качестве порогового значения серого для дальнейшего использования в алгоритмах движения по линии.
Движение по тонкой линии Arduino
Фрагмент соревнований по робототехнике «Движение по тонкой линии». Также это соревнование называют «Тонкий Триал». Этот очень быстрый робот в номинации роботов Arduino является победителем региональных соревнований.
По условиям соревнований робот Arduino должен совершить объезд кирпича и преодолеть качающийся мост. После преодоления препятствий робот должен вернуться на линию и финишировать не сойдя с трассы. Тонкий триал есть и в категории Lego EV3 роботов.
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
На втором занятии мы детальнее познакомимся со средой программирования и подробно изучим команды, задающие движение нашему роботу-тележке, собранному на первом занятии. Итак, давайте запустим среду программирования Lego mindstorms EV3, загрузим наш проект lessons.ev3, созданный ранее и добавим в проект новую программу - lesson-2-1. Программу можно добавить двумя способами:
· Выбрать команду "Файл"-"Добавить программу" (Ctrl+N).
· Нажать "+" на вкладке программ.

2.1. Палитры программирования и программные блоки
Давайте теперь обратим свой взгляд в нижний раздел среды программирования. Из материала первого занятия мы уже знаем, что здесь находятся команды для программирования робота. Разработчики применили оригинальный прием и, сгруппировав программные блоки, присвоили каждой группе свой цвет, назвав группы палитрами.
Зеленая палитра называется: "Действие":

На данной палитре расположены программные блоки управления моторами, блок вывода на экран, блок управления индикатором состояния модуля. Сейчас мы начнем изучение этих программных блоков.
2.2. Зеленая палитра – блоки действия
Первый программный блок зеленой палитры предназначен для управления средним мотором, второй блок - для управления большим мотором. Так как параметры этих блоков идентичны - рассмотрим настройку на примере блока - большой мотор.

Для правильной настройки блока управления большим мотором мы должны:
1. Выбрать порт, к которому подключен мотор (A, B, C или D) (Рис. 3 поз. 1)
2. Выбрать режим работы мотора (Рис. 3 поз. 2)
3. Настроить параметры выбранного режима (Рис. 3 поз. 3)
Чем же отличаются режимы? Режим: "Включить" включает мотор с заданным параметром "Мощность" и после этого управление передается следующему программному блоку программы. Мотор будет продолжать вращаться, пока не будет остановлен следующим блоком "Большой мотор" с режимом "Выключить" или следующий блок "Большой мотор" не будет содержать другие параметры выполнения. Режим "Включить на количество секунд" включает большой мотор с установленной мощностью на указанное количество секунд, и только по завершению времени мотор остановится, а управление в программе перейдет к следующему программному блоку. Аналогично поведет мотор себя в режимах "Включить на количество градусов" и "Включить на количество оборотов": только после выполнения установленного вращения мотора, он остановится и управление в программе перейдет к следующему блоку.
Параметр мощность (на Рис. 3 мощность установлена в 75) может принимать значения от -100 до 100. Положительные значения мощности задают вращение мотора по часовой стрелке, отрицательные - против часовой. При значении мощности равном 0 мотор вращаться не будет, чем "выше" значение мощности, тем быстрее вращается мотор.
Параметр мощность задается только целыми значениями, параметры: секунды, градусы, обороты могут принимать значения с десятичной дробью. Но следует помнить, что минимальный шаг вращения мотора равен одному градусу.
Отдельно следует сказать о параметре "Тормозить в конце". Данный параметр, если установлен в значение "Тормозить" заставляет мотор тормозить после выполнения команды, а если установлен в значение "Двигаться накатом", то мотор будет вращаться по инерции, пока сам не остановится.
Следующие два программных блока "Рулевое управление" и "Независимое управление моторами" реализуют управление парой больших моторов. По умолчанию левый большой мотор подключается к порту "В", а правый - к порту "С". Но вы можете в настройках блока поменять порты подключения в соответствии с требованиями вашей конструкции (Рис. 4 поз. 1).

Параметр "Рулевое управление" (Рис. 4 поз. 2) может принимать значения от -100 до 100. Отрицательные значения параметра заставляют робота поворачивать налево, при значении равном 0 робот движется прямо, а положительные значения заставляют робота поворачивать направо. Стрелка над числовым параметром меняет свою ориентацию в зависимости от значения, подсказывая тем самым направление движения робота (Рис. 5).

Рис. 5
Программный блок "Независимое управление моторами" похож на программный блок "Рулевое управление". Он также управляет двумя большими моторами, только вместо параметра "Рулевое управление" появляется возможность независимого управления мощностью каждого мотора. При равном значении параметра "Мощность" для левого и правого мотора робот будет двигаться прямолинейно. Если на один мотор подать отрицательное значение мощности (например -50), а на второй - положительное значение (например 50), то робот будет разворачиваться на месте (Рис. 6).

Режимы работы этих блоков аналогичны режимам блока управления одним мотором, поэтому дополнительного описания не требуют.
2.3. Прямолинейное движение, повороты, разворот на месте остановка
Итак, теперь мы можем написать программу движения робота по какому-либо маршруту.
2.4. Экран, звук, индикатор состояния модуля
Программный блок "Экран" позволяет выводить текстовую или графическую информацию на жидкокристаллический экран блока EV3. Какое это может иметь практическое применение? Во-первых, на этапе программирования и отладки программы можно выводить на экран текущие показания датчиков во время работы робота. Во-вторых, можно выводить на экран название промежуточных этапов выполнения программы. Ну а в-третьих, с помощью графических изображений можно "оживить" экран робота, например с помощью мультипликации.

Программный блок "Экран" имеет четыре режима работы: режим "Текст" позволяет выводить текстовую строку на экран, режим "Фигуры" позволяет отображать на экране одну из четырех геометрических фигур (прямая, круг, прямоугольник, точка), режим "Изображение" может вывести на экран одно изображение. Изображение можно выбрать из богатой коллекции изображений или нарисовать свое, используя редактор изображений. Режим "Окно сброса настроек" сбрасывает экран модуля EV3 к стандартному информационному экрану, показываемому во время работы программы.

Рассмотрим параметры программного блока "Экран" в режиме "Текст" (Рис. 9 поз.1). Строка, предназначенная для вывода на экран, вводится в специальное поле (Рис. 9 поз. 2). К сожалению, в поле ввода текста можно вводить только буквы латинского алфавита, цифры и знаки препинания. Если режим "Очистить экран" установлен в значение "Истина", то экран перед выводом информации будет очищен. Поэтому, если вам требуется объединить текущий вывод с информацией уже находящейся на экране, то установите этот режим в значение "Ложь". Режимы "X" и "Y" определяют точку на экране, с которой начинается вывод информации. Экран блока EV3 имеет 178 пикселей (точек) в ширину и 128 пикселей в высоту. Режим "X" может принимать значения от 0 до 177, режим "Y" может принимать значения от 0 до 127. Верхняя левая точка имеет координаты (0, 0), правая нижняя (177, 127)

Во время настройки программного блока "Экран" можно включить режим предварительного просмотра (Рис. 9 поз. 3) и визуально оценить результат настроек вывода информации.
В режиме "Фигуры" (Рис. 11 поз. 1) настройки программного блока меняются в зависимости от типа фигуры. Так при отображении круга необходимо будет задать координаты "X" и "Y" центра окружности, а также значение "Радиуса". Параметр "Заполнить" (Рис. 11 поз. 2) отвечает за то, что будет отображен либо контур фигуры, либо внутренняя область фигуры будет заполнена цветом, заданным в параметре "Цвет" (Рис. 11 поз. 3).

Для отображения прямой необходимо задать координаты двух крайних точек, между которыми располагается прямая.

Чтобы отобразить прямоугольник следует задать координаты "X" и "Y" левого верхнего угла прямоугольника, а также его "Ширину" и "Высоту".

Отобразить точку проще всего! Укажите лишь её координаты "X" и "Y".
Режим "Изображение", наверное, самый интересный и самый используемый режим. Он позволяет выводить на экран изображения. Среда программирования содержит огромную библиотеку изображений, отсортированную по категориям. В дополнение к имеющимся изображениям вы всегда можете создать свой рисунок и, вставив его в проект, вывести на экран. ("Главное меню среды программирования" - "Инструменты" - "Редактор изображения"). Создавая своё изображение, вы можете также вывести на экран символы русского алфавита.

Как вы видите - отображению информации на экране главного модуля EV3 среда программирования придает огромное значение. Давайте рассмотрим следующий важный программный блок "Звук". С помощью этого блока мы можем выводить на встроенный динамик блока EV3 звуковые файлы, тона произвольной длительности и частоты, а также музыкальные ноты. Давайте рассмотрим настройки программного блока в режиме "Воспроизвести тон" (Рис. 15). В этом режиме необходимо задать "Частоту" тона (Рис. 15 поз. 1), "Продолжительность" звучания в секундах (Рис. 15 поз. 2), а также громкость звучания (Рис. 15 поз. 3).

В режиме "Воспроизвести ноту" вам вместо частоты тона необходимо выбрать ноту на виртуальной клавиатуре, а также установить длительность звучания и громкость (Рис. 16).

В режиме "Воспроизвести файл" вы можете выбрать один из звуковых файлов из библиотеки (Рис. 17 поз. 1), либо, подключив к компьютеру микрофон, с помощью Редактора звука ("Главное меню среды программирования" - "Инструменты" - "Редактор звука") записать собственный звуковой файл и включить его в проект.

Давайте отдельно рассмотрим параметр "Тип воспроизведения" (Рис. 17 поз. 2), общий для всех режимов программного блока "Звук". Если данный параметр установлен в значение "Ожидать завершения", то управление следующему программному блоку будет передано только после полного воспроизведения звука или звукового файла. В случае установки одного из двух следующих значений начнется воспроизведение звука и управление в программе перейдет к следующему программному блоку, только звук или звуковой файл будет воспроизведен один раз или будет повторяться, пока не его не остановит другой программный блок "Звук".
Нам осталось познакомиться с последним программным блоком зеленой палитры - блоком "Индикатор состояния модуля". Вокруг кнопок управления модулем EV3 смонтирована цветовая индикация, которая может светиться одним из трех цветов: зеленым, оранжевым или красным. За включение - выключение цветовой индикации отвечает соответствующий режим (Рис. 18 поз. 1). Параметр "Цвет" задает цветовое оформление индикации (Рис. 18 поз. 2). Параметр "Импульсный" отвечает за включение - отключение режима мерцания цветовой индикации (Рис. 18 поз. 3). Как можно использовать цветовую индикацию? Например, можно во время различных режимов работы робота использовать различные цветовые сигналы. Это поможет понять: так ли выполняется программа, как мы запланировали.

Давайте используем полученные знания на практике и немного "раскрасим" нашу программу из Задачи 1.
Воспользуйтесь Ультразвуковым датчиком, чтобы обнаружить Кубоид и вовремя среагировать.

План урока
1. Подготовка
- Ознакомьтесь с материалами для учащихся в приложении Education EV3 Classroom.
- Соберите информацию о принципе работы Ультразвукового датчика.
- Вам понадобится рулетка, чтобы определить, куда поместить Кубоид. К концу урока ученики должны собрать модель Приводной платформы. Это займёт около 30 минут.
- Используйте идеи, приведенные в разделе Начало обсуждения, чтобы вовлечь учеников в дискуссию по теме урока.
- Разделите класс на пары.
3. Исследование (20 мин.)
- Попросите каждую пару учащихся собрать Кубоид и устройство «Ультразвуковой датчик» для Приводной платформы.
- Дайте им время воспользоваться предоставляемыми подпрограммами, чтобы понять, как использовать Ультразвуковой датчик.
4. Объяснение (5 мин.)
- Обсудите, как можно использовать Ультразвуковой датчик для измерения расстояния.
5. Дополнение (15 мин.)
- Дайте учащимся задание запрограммировать Приводную платформу так, чтобы её звуковой сигнал становился чаще или громче при приближении к Кубоиду.
- Не забудьте оставить время на уборку.
6. Оценка
- Дайте оценку работе каждого учащегося.
- Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Модульные роботы полезны тем, что их функционал можно расширить и перенастроить для выполнения широкого спектра задач. Добавление датчиков позволяет им реагировать на окружающую среду: распознавать препятствия и избегать столкновений.

Используйте эти вопросы для начала дискуссии о роботах, способных распознавать объекты.
- Знаете ли вы о роботах, которые могут распознавать объекты?
- Почему полезно использовать роботов, умеющих распознавать объекты?
- Что такое ультразвук и как работает Ультразвуковой датчик?
Советы по сборке

Инструкции по сборке
Не разбирайте Приводную платформу после использования.
Советы по программированию
Основная программа
Пример решения
Индивидуальный подход
Способы упростить задание
- Уделите больше времени разъяснению, как использовать Ультразвуковой датчик.
Способы сделать задание ещё интереснее
- Дайте ученикам задание запрограммировать автономного робота, объезжающего препятствия.
- Пусть они попробуют обнаруживать препятствия, заменив Ультразвуковой датчик на Датчик касания.
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
- Задание выполнено частично.
- Задание выполнено полностью.
- Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся обнаруживают объекты с помощью Ультразвукового датчика.
- Учащиеся обнаруживают объекты на разных расстояниях, меняя параметры блоков Ультразвукового датчика.
- Учащиеся могут дополнить программу, чтобы научить Приводную платформу реагировать движением на измеренное датчиком расстояние.
Самостоятельная оценка
Попросите каждого ребёнка выбрать уровень, который, по его мнению, соответствует качеству его работы на занятии.
- Бронзовый. Я остановил (-а) модель перед предметом с помощью Ультразвукового датчика.
- Серебряный. Я измерил (-а) расстояние до предмета с помощью Ультразвукового датчика.
- Золотой. Я внес (-ла) одно дополнение в программу, чтобы модель реагировала движением на измеренное расстояние до предмета.
- Платиновый. Я внес (-ла) несколько дополнений в программу, чтобы модель реагировала движением на измеренное расстояние до предмета.

Развитие языковых навыков
Для разностороннего развития языковых навыков предложите ученикам следующие задания.
- Подготовить презентацию о том, как работают Ультразвуковые датчики.
Примечание. Для выполнения этого задания требуется дополнительное время.
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности.
Читайте также: