
Овсяницкий курс программирования робота ev3 в среде lego mindstorms ev3
Обновлено: 11.05.2024
Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии, Овсяницкая Л.Ю., Овсяницкий Д.Н., Овсяницкий А.Д., 2015.
В книге рассмотрены алгоритмы движения робота Lego Mindstorms EV3 по линии от простых до профессиональных, предназначенных для скоростного движения по сложным траекториям. Представлены варианты прохождения инверсии, перекрестков, штрих-кодов, прерывистой линии и объезда препятствий. Все алгоритмы сопровождаются подробным объяснением и программным кодом.
Книга будет полезна педагогам начального, среднего, высшего и дополнительного образования, учащимся, студентам и всем, интересующимся вопросами робототехники.
Калибровка датчиков.
Калибровка датчиков является первым шагом реализации алгоритма движения по линии.
Датчик цвета, работая в режиме измерения количества отраженного света, освещает светодиодом поверхность и фиксирует по 100-значной шкале количество отраженного от нее света. Если 100 % света, созданного датчиком, отразится, то датчик передает значение 100. Если от поверхности ничего не отразится, то значение датчика будет равно 0 (рис. 2.1.1).
Поскольку датчик цвета в указанном режиме фиксирует только процент отраженного света, то получаемые значения удобно сравнивать со шкалой градаций серого цвета. Можно сказать, что датчик различает 100 градаций серого цвета.
Перед началом реализации любого алгоритма следования по линии необходимо проводить калибровку датчиков. Она заключается в том, что мы должны найти то состояние, к которому будет стремиться датчик. Если мы хотим, чтобы робот двигался так, чтобы датчик цвета находился на границе черного и белого цвета, мы должны рассчитать числовое значение, соответствующее этому положению. Будем называть это состояние «среднее значение серого».
Оглавление.
ВВЕДЕНИЕ.
1. ОСОБЕННОСТИ КОНСТРУИРОВАНИЯ РОБОТА ДЛЯ ДВИЖЕНИЯ ПО ЛИНИИ.
2. АЛГОРИТМЫ ДВИЖЕНИЯ ПО ЛИНИИ.
2.1. Калибровка датчиков.
2.2. Особенности использования датчиков цвета и освещенности NXT.
2.3. Дискретная система управления.
2.3.1. Алгоритм движения по линии «Зигзаг» с одним и двумя датчиками цвета.
2.3.2. Алгоритм «Волна».
2.3.3. Алгоритм автоматической калибровки. Создание блоков подпрограмм.
2.4. Пропорциональное управление.
2.4.1. Адаптация алгоритмов пропорционального управления к среде Lego Mindstorms EV3. Принцип работы блока рулевого управления.
2.4.2. Пропорциональный регулятор (П-регулятор).
2.4.3. Добавление кубической составляющей к П-регулятору.
2.4.4. Реализация П-регулятора на основе грех датчиков с дискретным изменением коэффициента н скорости.
2.4.5. Реализация П-регулятора на основе независимого управления моторами.
2.4.6. Встроенный режим калибровки (нормализации).
2.4.7. Пропорциональный интегральный регулятор (ПИ-регулятор).
Курс программирования робота EV3 в среде Lego Mindstorms EV3, Овсяницкая Л.Ю., Овсяницкий Д.Н., Овсяницкий А.Д., 2016.
Книга посвящена программированию робота EV3 в среде Lego Mindstorms EV3. Работа является результатом многолетнего опыта непосредственного участия авторов в региональных, всероссийских и международных состязаниях по робототехнике и педагогической деятельности, направленной на подготовку учителей, преподавателей и тренеров по данной тематике.
Книга будет полезна педагогам начального, среднего, высшего и дополнительного образования, учащимся, студентам и всем, интересующимся вопросами робототехники.
Создание первого проекта.
Проект - это новая составляющая среды программирования, которая отсутствовала в предыдущих версиях. Проект содержит:
- программы;
- объекты, используемые в программах проекта:
- подпрограммы;
- звуки, изображения, видеоролики, текстовые файлы;
- переменные;
- константы.
Можно привести сравнение проекта с книгой MS Excel, которая состоит из листов. Причём листы могут быть автономны или содержать информацию, относящуюся к общей теме книги. При сохранении книги сохраняются все листы, при сохранении проекта в среде Lego Mindstorms EV3 сохраняются все входящие в него программы и используемые в них объекты.
Программы, содержащиеся в проекте EV3, могут относиться к выполнению одного задания для робота (например, варианты прохождения лабиринта или захват определённых предметов в зависимости от их расположения) или быть совершенно не связанными друг с другом.
ОГЛАВЛЕНИЕ.
Введение.
Глава 1. Характеристики робота. Создание и запуск первого проекта.
1.1. Краткая характеристика роботизированных платформ. Обзор среды программирования Lego Mindstorms EV3.
1.2. Способы подключения робота к компьютеру. Обновление прошивки блока EV3. Загрузка программ в блок EV3.
Глава 2. Программирование робота.
2.1. Моторы. Программирование движений по различным траекториям.
2.2. Работа с подсветкой, экраном и звуком.
2.2.1. Работа с экраном.
2.2.2. Работа с подсветкой кнопок на блоке EV3.
2.2.3. Работа со звуком.
2.3. Программные структуры.
2.3.1. Структура Ожидание.
2.3.2. Структура Цикл.
2.3.3. Структура Переключатель.
2.4. Работа с данными.
2.4.1. Типы данных. Проводники.
2.4.2. Переменные и константы.
2.4.3. Математические операции с данными.
2.4.4. Другие блоки работы с данными.
2.4.5. Работа с массивами.
2.4.6. Логические операции с данными.
2.5. Работа с датчиками.
2.5.1. Датчик касания.
2.5.2. Датчик цвета.
2.5.3. Гироскопический датчик.
2.5.4. Ультразвуковой датчик.
2.5.5. Инфракрасный датчик и маяк.
2.5.6. Датчик Вращение мотора (определение угла/количества оборотов и мощности мотора».
2.5.7. Кнопки управления модулем.
2.6. Работа с файлами.
2.7. Совместная работа нескольких роботов.
2.7.1. Соединение роботов кабелем USB.
2.7.2. Связь роботов с помощью Bluetooth-соединения.
2.8. Полезные блоки и инструменты.
2.8.1. Блок «Поддерживать в активном состоянии».
2.8.2. Блок «Остановить программу».
2.8.3. Создание подпрограмм.
2.8.4. Запись комментариев.
2.8.5. Использование проводного ввода порта.
Глава 3. Основные виды соревнований и элементы заданий.
3.1. Соревнования Сумо.
3.2. Кегельринг.
3.3. Слалом (объезд препятствий).
3.4. Программирование движения полиции.
3.4.1. Алгоритм движения по линии «Зигзаг» с одним и двумя датчиками цвета.
3.4.2. Алгоритм «Волна».
3.4.3. Алгоритм автоматическом калибровки датчика цвета.
3.5. Пропорциональное линейное управление.
3.5.1. Движение но линии на основе пропорционального управления.
3.5.2. Поиск и подсчёт перекрёстков при пропорциональном управлении движением по линии.
3.5.3. Проезд инверсии.
3.5.4. Движение робота вдоль стены.
3.6. Поиск цели в лабиринте.
Глава 4. Обновление встроенного ПО и перезапуск блока EV3.
Глава 5. Использование сторонних датчиков.
5.1. Работа с HiTech датчиком цвета.
5.2. Использование других датчиков.
Заключение.
На этой странице собраны инструкции по сборке роботов или механизмов из стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544). Кроме инструкций вы найдёте здесь видео, показывающие возможности собранных моделей, и демонстрационные программы. Для некоторых моделей даны рекомендации, с помощью каких приложений можно дистанционно управлять роботами и как настраивать эти приложения.


Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.

Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.

Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.
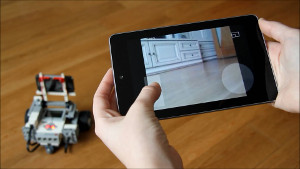
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.

Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.

Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.

Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».

В базовом образовательном наборе LEGO Mindstorms Education EV3 (45544) оказалось достаточно шестерёнок и других деталей, чтобы собрать часы с часовой и минутной стрелками. Кроме того, что часы точно отображают время, они издают звуковой сигнал каждый час.

В образовательном наборе конструктора Mindstorms Education EV3 всё обучение робототехники в классе ведётся с помощью приводной платформы, на колёсном ходу. Мне же захотелось сделать точно такую же платформу, чтобы на неё точно также можно было установить все датчики, но только, чтобы она передвигалась с помощью гусениц.
Имея под рукой образовательный набор LEGO Mindstorms EV3 (45544) и шарики для пинг-понга вполне можно собрать пушку, стреляющую шариками. Пушкой можно управлять со смартфона с помощью приложения RoboCam.
Если вы горите желанием сделать робота с большими колёсами из образовательного набора LEGO Mindstorms EV3 (45544), но у вас нет таких колёс, не расстраивайтесь. Вы можете изготовить их самостоятельно из толстого гофрированного картона. Как сделать робота с большими картонными колёсами, чтобы колёса нормально крутились и не отваливались, я предлагаю вам прочитать в этой статье.
Чтобы программировать робота LEGO Mindstorms EV3 на языке Python мало знать только этот язык. Необходимо ещё иметь представление о библиотеке ev3dev.ev3, для работы с датчиками и моторами. А также не помешало бы иметь под рукой полноценную среду разработки с подсказками, подсветкой синтаксиса и отладчиком. В статье я опишу, как настроить EV3 и компьютер для комфортной разработки вашего проекта на Python.
Мне очень понравился проект робота-художника EV3 Print3rbot, в котором, к сожалению, используются нестандартные детали, которые нужно печатать на 3D-принтере. Я решил собрать такого же робота, но используя детали только из образовательного набора LEGO Mindstorms EV3 (45544). И у меня это получилось, правда, пришлось добавить ещё резинок.

Чтобы программировать робота LEGO Mindstorms EV3 на любимом языке программирования, использовать огромное количество продвинутых библиотек и получить доступ к дополнительному подключаемому оборудованию, такому как клавиатура, джойстики, мышки и камеры, вам просто необходимо использовать полноценную операционную систему. Здесь на помощь придёт ev3dev – операционная система, базирующаяся на Debian Linux. Я предлагаю вам познакомиться с процессом установки и настройки этой операционной системы.

С помощью дополнительных блоков можно существенно расширить возможности своей программы, созданной в среде разработке LEGO Mindstorms EV3. Читая эту статью вы изучите анатомию блока и научитесь создавать свои собственные блоки.
Роботом, собранным из конструктора LEGO Mindstorms EV3, вы легко можете управлять дистанционно от первого лица. Для этого вам дополнительно понадобится два смартфона, с установленным приложением RoboCam на один из них. Давайте познакомимся подробнее с приложением RoboCam и научимся им пользоваться.
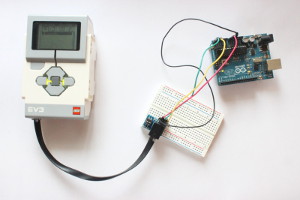
Иногда, при создании роботов возникает необходимость использования нескольких различных платформ в одном проекте, например, EV3 и Arduino. Так вы сможете использовать сильные стороны каждой из платформ и распараллелить выполняемые задачи. Я предлагаю вам ознакомиться с переводом статьи, в которой описано, как соединить EV3 и Arduino и как использовать Arduino совместно с EV3.
Используя конструктор LEGO MINDSTORMS EV3 и веб-камеру, вы сможете провести эксперимент по обнаружению лиц в помещении. Для эксперимента подойдёт любой колёсный робот EV3, который умеет вращаться на месте, и на который вы сможете закрепить веб камеру. Робот будет сканировать помещение, поворачиваясь вокруг, а, увидев лица, будет останавливаться и дёргаться столько раз, сколько лиц увидел.

Open Roberta Lab или открытая лаборатория Роберты, робо-леди, которую вы видите на картинке – это облачная среда программирования роботов Lego Mindstorms EV3 очень похожая на Scratch 2, но не требующая установки на компьютер. Ваши готовые программы вы можете протестировать здесь же на симуляторе. Для программирования и использования симулятора вам достаточно иметь браузер и доступ в интернет.
![]()
С помощью веб-камеры и образовательного набора конструктора LEGO MINDSTORMS Education EV3 (45544) вполне можно сделать робота, отслеживающего двигающийся объект. Робот сможет не только поворачивать камеру в сторону объекта, но и выдерживать определённую дистанцию до него, т.е. подъехать поближе, если объект удаляется от камеры, или отъехать подальше, если объект приближается. О том, как это сделать поговорим в этой статье.
Гимнаста выполняющего различные упражнения на турнике сделать достаточно просто, если у вас есть образовательный конструктор LEGO MINDSTORMS Education EV3 (45544). Я научил гимнаста выполнять три упражнения, а вы можете научить его и другим различным трюкам.
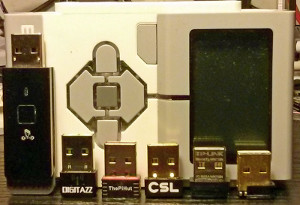
Как известно, виртуальная Java-машина leJOS, которую мы можем использовать для программирования роботизированного конструктора LEGO Mindstorms EV3, совместима не только с официально поддерживаемым адаптером NETGEAR N150, но и с рядом других адаптеров. Здесь я предлагаю вам перевод статьи с официального блога leJOS, в которой приводится сравнение различных поддерживаемых WiFi-адаптеров.
Гоночную машину, имитирующую болид формулы 1, можно сделать с помощью образовательного набора LEGO MINDSTORMS Education EV3 (45544). В машине сидит водитель и держится за руль. Машина дистанционно управляется с Android-смартфона.

Эта статья будет интересна тем, кто хочет сделать программу для дистанционного управления роботом EV3 со стандартной заводской прошивкой через Bluetooth, WiFi или USB и не важно, с какого устройства или операционной системы. Здесь мы рассмотрим протокол взаимодействия между модулем EV3 и вашей программой.
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

С помощью чего только не программируются роботы LEGO Mindstorms EV3. Поддерживается большое количество языков программирования на любой вкус. Но сегодня я хочу рассказать вам, о самом, на мой взгляд, удобном и богатом, в плане возможностей, способе программирования роботов LEGO Mindstorms EV3. Удобный, потому что разрабатывать можно в среде разработки Eclipse на языке Java, а богатый, потому, что виртуальная машина Java для EV3, которая называется leJOS, поддерживает не только стандартные возможности EV3, но даёт и гораздо больше.
Если вам нравится графическая среда программирования Scratch 2.0, то вам необязательно отказываться от неё для программирования роботов Lego Mindstorms EV3. Достаточно лишь установить и настроить нужное программное обеспечение, о чём и будет написано в этой статье.
Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.
Селеноход – это луноход, созданный российской командой для участия в конкурсе Google Lunar X PRIZE. В настоящий момент проект закрыт, но интересная конструкция с не менее интересной системой передвижения по лунной поверхности остались. С помощью стартового образовательного набора LEGO MINDSTORMS Education EV3 (45544) возможно собрать модель Селенохода, который будет передвигаться по такому же принципу и так же поднимать и опускать «голову».
Книжная полка робототехника
Открылась Книжная полка Городского методического Центра по образовательной робототехнике. В данном разделе каждый из вас может ознакомиться с новыми книгами.

Использование LEGO-роботов в инженерных проектах школьников. Отраслевой подход
В методическом пособии представлены проекты школьников, которые были реализованы на научно-образовательных школах «Лифт в будущее» Некоммерческого партнёрства содействия развитию интеллектуального и творческого потенциала молодёжи. Ученики вместе с экспертами и представителями российских инновационных компаний разрабатывали решения, направленные на модернизацию существующих в регионах России производств и на внедрение новых технологий. Осуществляя обучение школьника в той или иной отрасли, авторы формируют осознанный подход к выбору специальности и стремятся к тому, чтобы будущие технологические лидеры нашли применение своим идеям в России. Такой инженерно-отраслевой принцип позволит развить существующие подходы в преподавании робототехники в школе и даст новое направление в развитии проектной деятельности учащихся.
Издание рассчитано на учителей средней и старшей школы, а также будет полезно школьникам основной школы при проведении проектной деятельности.
Оглавление и отрывки из глав из методического пособия «Использование LEGO-роботов в инженерных проектах школьников. Отраслевой подход»
Книга посвящена программированию робота LEGO Mindstorms EV3, который был впервые представлен компанией LEGO в начале 2013 года. Книга является результатом многолетнего опыта авторов. Книга будет полезна педагогам начального, среднего и дополнительного образования, а также учащимся и студентам, интересующимся вопросами робототехники.
С оглавлением книги «Курс программирования Lego Mindstorms EV3 робота в среде EV3» познакомиться здесь.
Белиовская Л.Г. Узнайте, как программировать на LabVIEW. – Изд-во ДМК, 2013. – 140 с.
Автор книги – победитель конкурса лучших учителей России, тренер сборной команды школьников России по робототехнике.
Руководство преподавателя по ROBOTC ® для LEGO ® MINDSTORMS ®
Перевод на русский язык базовой части официального руководства по программированию на РОБОТС для LEGO MINDSTORMS – Teacher’s Guide for the ROBOTC for MINDSTORMS. Данные учебно-методические материалы содержат 30 базовых уроков по программированию на языке ROBOTC ® для LEGO ® MINDSTORMS ® по таким темам, как основы языка, управление движением, работа с контактным, ультразвуковым, звуковым и световым датчиками, отладка программ и др. на примере задач обнаружения препятствий, отслеживания линии и т. п.
Переведено и издано с разрешения Carnegie Mellon Robotics Academy. 175 стр., мягкий переплет, Москва, 2013. Издание второе, исправленное и дополненное.
© Carnegie Mellon Robotics Academy, 2009-2012 © Перевод: А. Федулеев, 2012
Филиппов С.А. Робототехника для детей и родителей. – 3-е издание
Уже много лет мы читаем в книгах и газетах, слышим по радио и из телевизора, что скоро нас будут окружать умные, добрые и интересные роботы. Однако в реальной жизни роботов всё нет и нет. Лишь несколько лет назад знаменитая датская компания Lego сделала роскошный подарок любителям мехатроники, роботов и других кибернетических игр и игрушек – выпустила робототехнический конструктор Lego Mindstorms NXT, который с успехом используется как дома, так и в учебе.
Эта книга одна из первых на русском языке поможет не только самому строить и программировать разнообразных роботов из Lego, но и научить этому других школьников, студентов. В ней рассматриваются основы конструирования, программирования на языках NXT-G, Robolab и RobotC, а также элементы теории автоматического управления.
В третьем издании добавлены описания усовершенствованых конструкций роботов, а также рассмотрены новые задачи: прохождение лабиринта, роботы-манипуляторы, инверсная линия и др. По-прежнему большое внимание уделено алгоритмам управления: от П- и ПД-регулятора для движения по линии до ПИД-регулятора для балансирующего робота-сигвея.
Предназначена для преподавателей кружков робототехники школ и вузов, для широкого круга читателей.

Книга «Программируем NXT в Lab VIEW 2009». Издательство «ДМК Пресс»
В книге представлены уроки изучения популярного инженерного языка программирования LabVIEW 2009 в школе в соответствии со школьной программой по информатике, подробно рассмотрен процесс создания оконных приложений в среде LabVIEW.
2009 Education Edition с использованием NXT.
Книга поступила в продажу в конце апреля 2010.
Первый шаг в робототехнику. Практикум для 5–6 классов
Практикум является частью учебно-методического комплекта для средней школы, в который также входит рабочая тетрадь для 5–6 классов. Цель практикума – дать школьникам современное представление о прикладной науке, занимающейся разработкой автоматизированных технических систем, – робототехнике. Его можно использовать как для занятий в классе, так и для самостоятельной подготовки.
Учебные занятия с использованием данного практикума способствуют развитию конструкторских, инженерных и общенаучных навыков, помогают по-другому посмотреть на вопросы, связанные с изучением естественных наук, информационных технологий и математики, обеспечивают вовлечение учащихся в научно-техническое творчество.
Практикум содержит описание актуальных социальных, научных и технических задач и проблем, решение которых еще предстоит найти будущим поколениям, и позволяет учащимся почувствовать себя исследователями, конструкторами и изобретателями технических устройств.
Заглянуть внутрь (несколько страниц в формате PDF)
Книга «Уроки ЛЕГО-конструирования в школе». – М.: Издательство БИНОМ, 2011.
Методическое пособие содержит описание методики, позволяющей встроить в учебный процесс технологии конструирования с использованием ИКТ, ознакомить учителей с особенностями ЛЕГО-конструирования, возможностями ЛЕГО-конструирования и вариантами проектирования ЛЕГО-моделей для школьников разного возраста. Книга содержит материалы по обеспечению методической поддержки конкурсов для учащихся, нормативному обеспечению подготовки и проведения соревнований по ЛЕГО-конструированию.
Книга предназначается для учителей-предметиков, учителей начальных классов, педагогов дополнительного образования, методистов; содержит материалы по обеспечению методической поддержки конкурсов для учащихся, нормативному обеспечению подготовки и проведения соревнований по ЛЕГО-конструированию.
Юревич Е. П. Основы робототехники. – 3-е изд.
Написанное крупнейшим специалистом и талантливым популяризатором идей робототехники, учебное пособие восполняет отсутствие простых, доступных, но в тоже время профессионально строгих и достаточно ёмких книг, вводящих читателя в мир современной робототехники.
Робототехника охватывает практически все сферы человеческой деятельности: промышленность, транспорт, сельское хозяйство, здравоохранение, быт, исследование и освоение океана и космоса, выполнение работ в других экстремальных условиях, научные исследования. В книге отражены все этапы развития робототехники от возникновения первых «механических людей» до перспектив создания роботов разумных, постепенно приближающиеся по своим возможностям к человеку. Рассмотрено устройство роботов и других средств робототехники, способы и системы управления, принципы проектирования и применения.
Книга соответствует государственному стандарту по дисциплине «Основы робототехники» и предназначено для студентов профильных направлений. Также представляет интерес для широкого круга читателей. + СД. В книгу вложен компакт-диск, который содержит динамические иллюстрации с комментариями автора.
Клаузен, Петер. Компьютеры и роботы. – М.: Мир книги, 2006.
Термину «робот» в нынешнем году исполняется 85 лет. Это широко использующееся сейчас слово впервые применил чешский писатель Карел Чапек в пьесе R.U.R. (Rossum's Universal Robots) для описания человекоподобных механизмов, выполняющих рутинную работу.
Макаров И.М., Топчеев Ю.И. РОБОТОТЕХНИКА. История и перспективы. М.: Наука, Издательство МАИ, 2003.
Авторы книги – Игорь Михайлович Макаров и Юрий Иванович Топчеев – популярно рассказывают о той роли, которую сыграли роботы в истории развития цивилизации: от роботов Средневековья до новых типов роботов для применения в космосе. Книга имеется в издательстве «Наука».
Читайте также: