
Подъемник лего первые механизмы
Обновлено: 03.05.2024
Выкладываем пошаговую инструкцию к мобильному манипулятору (подъемнику) на среднем моторе с цепной передачей на базе конструктора Lego Mindstorms Education EV3. Детально описана конструкция и принцип установки захвата. Манипулятор можно переделать в вилочный погрузчик. Устройство подойдет для занятий по робототехнике при обучении детей сортировке предметов, там где нужно ставить один предмет на другой (собирать башню из кубиков, ставить кубики на цилиндры и др.). В приложении приводятся примеры используемых механизмов в реальной жизни.
Оборудование: базовый набор Lego Mindstorms Education EV3.
Механизмы: цепная передача, зубчатая передача.
Модель: ММ-ЦП-СМ – мобильный манипулятор с цепной передачей на среднем моторе.
Описание. Устройство подъемного механизма собрано на основе цепной передачи, которая приводится в движение средним мотором. На цепь крепится захват любой подходящей конструкции. Для предотвращения опрокидывания тележки колеса смещены вперед относительно моторов.
Манипулятор имеет 1 степень свободы и перемещает захват вдоль оси Y. Двухпальцевый захват можно заменить вилочным захватом и робот превратится в вилочный погрузчик.
Чтобы захват под собственным весом при движении не опустился, а также для увеличения крутящего момента большого мотора и плавности подъема, используется понижающая зубчатая передача.
Захват крепится к цепи двумя штифтами и свободно переваливается через верхнюю точку. Можно дооснастить тележку кузовом для сборки нескольких предметов.
Недостатки:
- используется дополнительная зубчатая передача на ведущих колесах;
- блок EV3 повернут экраном к захвату.
Задачи:
- Собери мобильный манипулятор по инструкции.
- Попробуй устранить недостатки данной модели, которые перечислены выше.
- Выполни предложенные задачи по переносу или сортировке предметов.
- Попробуй переделать конструкцию данного манипулятора под вилочный погрузчик.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
5 практика - Простые механизмы (клешня, зубчатая передача <прямая, коническая>, ременная передача, катапульта, шлагбаум, блок, кран, волчок, локатор, ковш экскаватора, гусеничный ход. )

1. Волчок (Силаева Яна)
2. Карусель (Филиппова Анастасия)
3. Колёса и оси (Чуприна Лариса)
4. Ременные передачи (Дрягина Юлия)
5. Блок (Дрягина Юлия)
6. Рычаг
7. Катапульта (Сесикова Елена)
8. "Гусеница"
9. Шлагбаум
10. Кран(Мазяркина Виктория)
11. Ковш экскаватора
12. Локатор
13. Клешня (Задорожная Ольга)
14 колесо подвижное






Дополнительная образовательная программа объединения
научно-технического направления
«Робототехника»


Примерное планирование кружка «Робототехника»
Блок 22: Повторение способов передачи движения под углом 90 градусов (зубчатые передачи). Построение и программирование модели «Машина для разметки дорог». Анализ принципа управления машиной.
Блок 23: Построение и программирование сложной конструкции с применением нескольких видов передач (например производственный модуль – подъемный кран, транспортерная лента).
Тема: Управление механизмами с учетом внешних воздействий (14-28 часов)
Блок 24: Использование датчика касания, три режима работы: а) кратковременное нажатие, отпускание; б) долгое нажатие; в) количество щелчков. Построение и программирование модели с датчиком касания (задание лабиринт).
Блок 25: Нелинейное программирование. Понятие цикла, виды циклов, ветвления, безусловного перехода. Понятие контейнеров. Использование датчика освещённости. Построение машины с датчиком освещенности, калибровка датчика, запись значений в контейнеры.
Блок 26: Основы моделирования робота с 2 датчиками освещённости. Программирование «Ветвление» на 4 уровне "Инвентора" (задание – проехать по траектории).
Блок 27: Сборка робота с одним датчиком освещенности и программирование движения по траектории. Программирование циклов на 4 уровне «Инвентора».
Блок 28: Знакомство с Режимом «Исследователь». Исследование с датчиком освещённости «Измерение степени освещённости» (программирование, сборка модели, работа с данными).
Блок 29: Разработка сложного проекта с использованием датчиков освещенности и касания на основе конструктора с микропроцессором RCX.
Блок 30: Подготовка к соревнованиям.
Тема: Использование конструкторов ЛЕГО Перворобот NXT (10-20 часов).
Блок 31: Знакомство с конструктором. Обзор основных деталей, датчиков. Основные способы соединения деталей. Технологические узлы. Датчики: их возможности и ограничения.
Блок 32: Работа с технологическими картами. Создание простейших конструкций и механизмов.
Блок 33: Программирование в среде LEGO Mindstorms NXT. Программирование модели. Основные принципы программирования в Mindstorms (линейные программы). Палитра команд. Соединение пиктограмм. Сохранение программы. Передача программы в NXT. Тестирование модели. Настройка датчиков.
Блок 34: Разработка сложной модели на основе конструктора с микропроцессором NXT.
Блок 35: Подготовка к соревнованиям.
Примерные темы соревнований
1. Конец октября – соревнования по типу «Перетягивание каната», «Сумо». Требования к моделям – прочность конструкции, высокая мощность.
2. Середина ноября – соревнования по типу «Творческой категории». Основные требования к конструкциям – сложность сборки, использование не только деталей конструкторов, но и других материалов. Примерные темы – подъемный кран – кто выше поднимет стрелу…
3. Середина декабря – соревнование на прохождение траектории, преодоление препятствий, лабиринт. Требование к конструкции – наличие различных датчиков.
4. Конец января – отборочные соревнования младшая, средняя, старшая группы, творческая категория.
5. Середина февраля – муниципальные соревнования по результатам отборочного тура.
6. Середина апреля – тренировочные соревнования по правилам регионального тура.
Исследуйте воздействие массы и высоты на работу ножничного подъёмника.

1. Установление взаимосвязей
( 5-10 мин. )
Рычажные подъёмники предназначены для обеспечения легкого и безопасного доступа к местам работы на высоте и часто используются вместо лестниц-стремянок. Такие подъёмники способны поднимать тяжёлые грузы. На рабочей площадке достаточно места, чтобы разместить необходимые инструменты и не стеснять движения рабочих.
Учащимся предстоит собрать рычажный подъёмник и изучить, как масса груза и высота, на которую его поднимают, влияют на работоспособность механизма.

2. Конструирование
( 20-25 мин. )
Сборка рычажного подъёмника
Производится по Инструкциям 1А (полностью) и 1В (до с. 11, шаг 15).
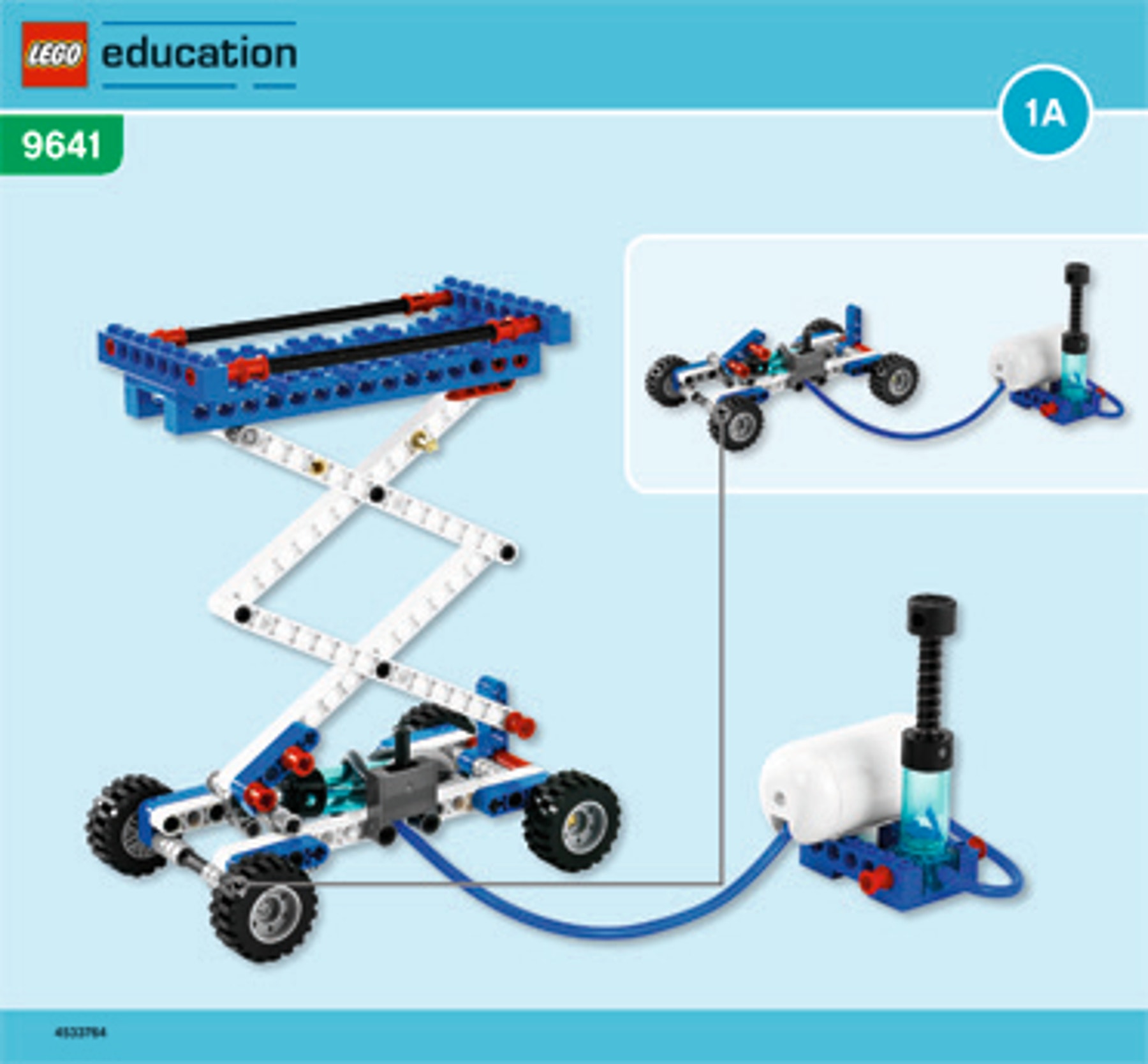
Накачивайте воздух в пневматическую систему так, чтобы обеспечить плавный подъём платформы.

Отпустите платформу – она должна резко вернуться в исходное положение. Если этого не произошло, проверьте, нет ли утечки воздуха из системы.
Опустите платформу и стравите сжатый воздух из баллона.
Полезный совет
Самый простой способ стравить сжатый воздух из баллона: отсоедините трубку, идущую от баллона к пневмопереключателю.

3. Рефлексия
( 20-25 мин. )
Исследование
Определите, как от массы груза и максимально возможной высоты его подъёма зависит, сколько раз потребуется нажать насос для подъёма платформы на эту высоту.
Сначала подумайте, сколько раз нужно нажать насос, чтобы поднять платформу А на максимальную высоту. Запишите свое предположение в Рабочий бланк.
Затем проверьте на практике, сколько раз пришлось нажимать насос.
Запишите полученные результаты в Рабочий бланк.
После этого проделайте то же самое с рычажными подъёмниками В, С и D. Повторите эксперимент несколько раз, чтобы удостовериться в воспроизводимости результатов.
Для варианта А (с. 11, шаг 15) потребуется нажать насос около 12 раз.
Для варианта В (с. 12, шаг 16) потребуется нажать насос около 20 раз.
Для варианта С (с. 17, шаг 21) потребуется нажать насос около 17 раз.
Для варианта D (с. 18, шаг 22) потребуется нажать насос около 28 раз.

Чтобы проверить, как учащиеся усвоили материал, задайте им следующие вопросы:
• Что должно произойти в соответствии с вашим предположением? Почему?
• Как работает рычажный подъёмник? Рычажный подъёмник представляет собой систему рычагов первого рода, соединённых между собой осями в центре каждого рычага (наподобие лезвий ножниц).
• Как можно проверить, «чисто» ли был поставлен эксперимент? Был ли стравлен сжатый воздух из баллона?
4. Развитие
( 25-30 мин. )
Какое давление потребуется?
Теперь вы знаете, сколько раз нужно нажать насос, чтобы поднять платформу на максимальную высоту. Подсоедините к пневматической системе манометр и определите, какое для этого понадобится давление (с. 20, шаг 24).
Сначала подумайте, какое давление необходимо, чтобы поднять платформу А на максимальную высоту. Запишите свое предположение в Рабочий бланк.
Затем проверьте на практике, какое потребовалось давление. Запишите полученные результаты в Рабочий бланк.
После этого проделайте то же самое с рычажными подъёмниками В, С и D. Повторите эксперимент несколько раз, чтобы удостовериться в воспроизводимости результатов.
Для варианта А (с. 11, шаг 15) потребуется давление около 1,0 бар.
Для варианта В (с. 12, шаг 16) потребуется давление около 1,5 бар.
Для варианта С (с. 17, шаг 21) потребуется давление около 1,4 бар.
Для варианта D (с. 18, шаг 22) потребуется давление около 2,1 бар.

Дополнительный вопрос
Почему, сразу после того, как платформа достигает максимальной высоты, давление в системе понижается?
При поднятии платформы поршень в гидравлическом цилиндре двигается вверх и, соответственно, площадь поверхности, на которую давит сжатый воздух, увеличивается, что и приводит к небольшому падению давления.
В помощь преподавателю
Естественные науки
• Площадь
• Свойства сжатых газов
• Силы
Технология
• Сборка модели
• Проверка механизмов
• Анализ результатов
• Использование механизмов – рычаги
Набор «Технология и основы механики»
Дополнительный набор «Пневматика»
Это относительно простое рычажное устройство ножничного типа, для работы которого требуется всего лишь один пневмопереключатель. На занятии исследуется работоспособность подъёмника, то есть, какую массу и на какую высоту он способен поднять (какой нужен насос, чтобы создать требуемое давление). Учащиеся должны высказать свои предположения и записать их в таблицу, а затем туда же внести результаты эксперимента.

Конструкторы «Первые механизмы» и «Первые конструкции» разработаны для ребят дошкольного возраста: 5 – 7 лет. Названия наборов очень похожи, но, на самом деле, различие есть. Конструктор «Первые конструкции» предназначен для изучения статических сооружений – мостов, небоскребов. Набор «Первые механизмы» хорошо подходит для исследования механизмов, в которых есть движущиеся части – шестерни, оси, колеса. Ребята могут начать изучение механизмов со статических конструкций, используя набор «Первые конструкции», а затем уже изучать их движения с набором «Первые механизмы».
В этой статье мы рассмотрим набор LEGO «Первые механизмы». Этот набор не предполагает каких-то начальных знаний у ребят – главное, чтобы было желание заниматься. Ребята могут заниматься индивидуально или в парах: второй вариант предпочтительней, поскольку он позволяет развивать навыки общения и командной работы.

Конструктор «Первые механизмы» включает в себя:
- 102 детали DUPLO
- Дополнительные пластиковые детали
- Инструкции по сборке 8 моделей
Комплект заданий к набору «Первые механизмы» содержит все методические материалы, необходимые преподавателю:
- Краткие истории и картинки, которые помогут ребятам лучше понять задание
- Рабочие тетради для учащихся
- Рекомендации для учителя
- Словарь терминов

В комплект также входит руководство для учителя и CD диск. Руководство учителя дает введение в учебный план для этого конструктора. Учебный план разделен на восемь 45-минутных занятий:
- Вертушка на палочке
- Волчок
- Качели
- Рафтинг
- Запуск машины
- Машина для измерения расстояния
- Хоккеист
- Новая собака Семена

Для каждого занятия предусмотрены дополнительные задания на 20 минут – они пригодятся для ребят, которые быстро выполнили основное задание. После выполнения учебных заданий можно переходить к творческим заданиям:
- Переправа через реку с крокодилами
- Жаркий день
- Пугало
- Качели
После изучения стандартных моделей ребята могут попробовать реализовать свои собственные идеи. Например, этот мальчик на видео создал механизм, который делает «гармошку» из полоски бумаги:
Набор «Первые механизмы» позволит ребятам:
- Изучить новые механизмы: шестерни, оси – и сконструировать механизмы с их использованием
- Проявить творческие способности
- Развить конструкторские навыки
Наборы «Первые механизмы» и «Первые конструкции» зародят у ребят интерес к конструированию, математике и физике, а для поддержания этого интереса можно воспользоваться другими наборами. Здесь есть два варианта:
- Набор «Построй свою историю» больше направлен на развитие творческих и коммуникативных навыков
- Набор простых механизмов позволит ребятам изучить инженерные и технические приемы
В любом случае, оба набора являются отличным инструментом для разностороннего развития детей.
1. Модели без мотора: механизмы и механические передачи из Lego EV3
Здесь собраны модели, в которых изучается работа механизмов и механических передач.

2. Модели с мотором: программируем сервомоторы и запускаем механизмы
Здесь собраны модели, в которых нужно программировать сервомоторы и собирать сложные механизмы.
3. Модели с датчиками: изучаем работу сенсоров и пишем программы на визуальном языке
Здесь изучаем работу датчиков и программируем модели на внешние реакции.
4. Шагающие роботы
Здесь изучаем работу шагающих механизмов из Lego EV3 и собираем модели, которые перемещаются с помощью конечностей.
5. Игры и соревнования
Здесь собраны модели и регламенты к играм и соревнованиям для Lego Education EV3.
6. Захваты
Здесь собраны разные варианты конструкций захватов для набора Lego EV3.
7. Манипуляторы
Здесь найдете инструкции к моделям для манипуляций с различными предметами.
Читайте также: