
Поля для lego mindstorms
Обновлено: 30.04.2024


Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв

Отзывов (12) | Оставить отзыв
Белое поле размером 1500 х1500 мм с нанечеными черными линиями, изображающими сложную траекторию движения, по которой двигаются роботы во время тренировки или соревнования. Поле предназначено для опытных робототехников.
Белое поле размером 1500 х1500 мм с нанечеными черными линиями, изображающими сложную траекторию движения, по которой двигаются роботы во время тре.
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Небольшое поле "Гантеля" идеально подходит не только для тренировки роботов, но и для соревнований, в которых могут участвовать как начинающие, так и опытные робототехники.
Небольшое поле "Гантеля" идеально подходит не только для тренировки роботов, но и для соревнований, в которых могут участвовать как начинающие, так.

Отзывов (12) | Оставить отзыв
Небольшое тренировочное поле, изготовленное на высококачественном баннере из плотного материала. Подходит для опытных робототехников.
Небольшое тренировочное поле, изготовленное на высококачественном баннере из плотного материала. Подходит для опытных робототехников.

Отзывов (12) | Оставить отзыв
Поле для проведения соревнований роботов. Набор предназначен для проведения силовых соревнований между роботами, рассчитан на опытных робототехников.
Поле для проведения соревнований роботов. Набор предназначен для проведения силовых соревнований между роботами, рассчитан на опытных робототехников.

Отзывов (12) | Оставить отзыв
Поле предназначено для тренировок и силовых соревнований роботов. Изготовлено из плотной баннерной такани высокого качества.
Поле предназначено для тренировок и силовых соревнований роботов. Изготовлено из плотной баннерной такани высокого качества.

Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.

Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.

Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.


Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Готовое тренировочное полея для соревнований WRO 2018 в Основной категории в средней возрастной группе
Готовое тренировочное полея для соревнований WRO 2018 в Основной категории в средней возрастной группе

Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Гибкий гладкий лист размером 1200х900 мм, плотностью 350 гр.м2, разрешение печати 720 dpi/м2. Поверхность поля позволяет рисовать на ней маркером на водной основе и стирать изображение без следов. Примерный вес - 1 кг.
Гибкий гладкий лист размером 1200х900 мм, плотностью 350 гр.м2, разрешение печати 720 dpi/м2. Поверхность поля позволяет рисовать на ней маркером н.
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.

Отзывов (12) | Оставить отзыв

Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.Размер изображения 1143х2362 мм. Можно использовать совместно с Основанием поля 1200х2400. (универсальное) и с Комплектом внутренних бортиков WRO/FLL к Основанию.
Отзывов (12) | Оставить отзыв

Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Небольшое поле "Гантеля" идеально подходит не только для тренировки роботов, но и для соревнований, в которых могут участвовать как начинающие, так и опытные робототехники.
Небольшое поле "Гантеля" идеально подходит не только для тренировки роботов, но и для соревнований, в которых могут участвовать как начинающие, так.
Отзывов (12) | Оставить отзыв
Небольшое тренировочное поле, изготовленное на высококачественном баннере из плотного материала. Подходит для опытных робототехников.
Небольшое тренировочное поле, изготовленное на высококачественном баннере из плотного материала. Подходит для опытных робототехников.
Отзывов (12) | Оставить отзыв
Поле для проведения соревнований роботов. Набор предназначен для проведения силовых соревнований между роботами, рассчитан на опытных робототехников.
Поле для проведения соревнований роботов. Набор предназначен для проведения силовых соревнований между роботами, рассчитан на опытных робототехников.
Отзывов (12) | Оставить отзыв
Белое поле размером 1500 х1500 мм с нанечеными черными линиями, изображающими сложную траекторию движения, по которой двигаются роботы во время тренировки или соревнования. Поле предназначено для опытных робототехников.
Белое поле размером 1500 х1500 мм с нанечеными черными линиями, изображающими сложную траекторию движения, по которой двигаются роботы во время тре.
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Поле предназначено для тренировок и силовых соревнований роботов. Изготовлено из плотной баннерной такани высокого качества.
Поле предназначено для тренировок и силовых соревнований роботов. Изготовлено из плотной баннерной такани высокого качества.
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Готовое тренировочное полея для соревнований WRO 2018 в Основной категории в средней возрастной группе
Готовое тренировочное полея для соревнований WRO 2018 в Основной категории в средней возрастной группе
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Гибкий гладкий лист размером 1200х900 мм, плотностью 350 гр.м2, разрешение печати 720 dpi/м2. Поверхность поля позволяет рисовать на ней маркером на водной основе и стирать изображение без следов. Примерный вес - 1 кг.
Гибкий гладкий лист размером 1200х900 мм, плотностью 350 гр.м2, разрешение печати 720 dpi/м2. Поверхность поля позволяет рисовать на ней маркером н.
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.
Отзывов (12) | Оставить отзыв
Отзывов (12) | Оставить отзыв
Литой баннер размером 1200х2400 мм, плотностью 520 гр.м2, разрешение печати 1440 dpi/м2. Примерный вес - 2 кг.Размер изображения 1143х2362 мм. Можно использовать совместно с Основанием поля 1200х2400. (универсальное) и с Комплектом внутренних бортиков WRO/FLL к Основанию.

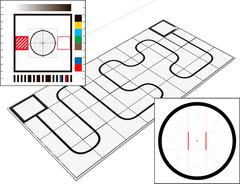
На данной странице представлена подборка макетов полей для проведения тренировок и соревнований в рамках курса робототехники. Все представленные макеты содержат краткую характеристику и уменьшенное изображение. Нажав на изображение поля, вы скачаете файл макета, который затем можете распечатать в цифровой типографии.
Макет поля для подготовки и проведения соревнований в дисциплинах Сумо и Кегельринг
В дисциплине Кегельринг робот должен за наименьшее время вытолкнуть кегли (жестяные банки для напитков 0,33 л.), расставленные внутри круга, за пределы черной линии.
В дисциплине Сумо робот должен вытолкнуть соперника из зоны круга за пределы черной линии.
Размер поля: 1250x1250 мм.
Файл макета в формате Adobe Illustrator.
(для просмотра макета можно воспользоваться программой Adobe Acrobat Reader)

Макет поля для отработки скоростного движения вдоль черной линии и проведения соревнований
Поле позволяет одновременно стартовать двум роботам. Правила соревнований предполагают, что робот должен пропустить соперника, находящегося на перекрестке.
Размер поля: 2400x1200 мм.
Файл макета в формате Adobe Illustrator.
(для просмотра макета можно воспользоваться программой Adobe Acrobat Reader)

Макет поля для отработки алгоритмов движения вдоль черной линии
Поле содержит множество перекрестков и извилистых линий. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время.
Размер поля: 2440x1220 мм.
Файл макета в формате Adobe Illustrator.
(для просмотра макета можно воспользоваться программой Adobe Acrobat Reader)

Макет поля для отработки алгоритмов движения вдоль черной линии
Поле в дополнение к перекресткам и извилистым линиям содержит блоки инверсной линии (белая линия на черном поле) и штриховую разметку. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время.
Размер поля: 2440x1220 мм.
Файл макета в формате Adobe Illustrator.
(для просмотра макета можно воспользоваться программой Adobe Acrobat Reader)

Введение:
Раздел "Практика" являет собой продолжение курса "Первые шаги". На протяжении ряда уроков мы разберем решение базовых задач робототехники., научимся получать и обрабатывать информацию от нескольких датчиков. Надеемся, что полученные знания помогут вам в дальнейшем при самостоятельном решении творческих и соревновательных задач.
Урок №11 посвятим разбору соревновательной дисциплины под названием "Кегельринг".
11.1 Правила соревнования. Подготовка поля для проведения соревнований.
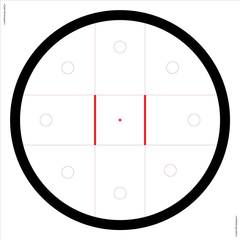
Основные правила "Кегельринга" довольно просты: необходимо собрать и запрограммировать робота, который выталкивает кегли за пределы ринга. Кеглями, как правило, выступают жестяные банки емкостью 0,33 л, а роль ринга выполняет белое поле, ограниченное черной окружностью с шириной линии 50 мм. С одним из вариантов регламента проведения соревнования можете ознакомиться под спойлером ниже:
1. Условия состязания
- За наиболее короткое время робот, не выходя более чем на 5 секунд за пределы круга, очерчивающего ринг, должен вытолкнуть расположенные в нем кегли.
- На очистку ринга от кеглей дается максимум 2 минуты.
- Если робот полностью выйдет за линию круга более чем на 5 секунд, попытка не засчитывается.
- Во время проведения состязания участники команд не должны касаться роботов, кеглей или ринга.
2. Ринг
- Цвет ринга - светлый.
- Цвет ограничительной линии - черный.
- Диаметр ринга - 1 м (белый круг).
- Ширина ограничительной линии - 50 мм.
3. Кегли
- Кегли представляют собой жестяные цилиндры и изготовлены из пустых стандартных жестяных банок (330 мл), использующихся для напитков.
- Диаметр кегли - 70 мм.
- Высота кегли - 120 мм.
- Вес кегли - не более 50 гр.
- Цвет кегли - белый.
4. Робот
- Максимальная ширина робота 20 см, длина - 20 см.
- Высота и вес робота не ограничены.
- Робот должен быть автономным.
- Во время соревнования размеры робота должны оставаться неизменными и не должны выходить за пределы 20 х 20 см.
- Робот не должен иметь никаких приспособлений для выталкивания кеглей (механических, пневматических, вибрационных, акустических и др.).
- Робот должен выталкивать кегли исключительно своим корпусом.
- Запрещено использование каких-либо клейких приспособлений на корпусе робота для сбора кеглей.
5. Игра
6. Правила отбора победителя
- Каждой команде дается не менее двух попыток (точное число определяется судейской коллегией в день проведения соревнований).
- В зачет принимается лучшее время из попыток или максимальное число вытолкнутых кеглей за отведенное время.
- Победителем объявляется команда, чей робот затратил на очистку ринга от кеглей наименьшее время, или, если ни одна команда не справилась с полной очисткой ринга, команда, чей робот вытолкнул за пределы ринга наибольшее количество кеглей.
Итак: для проведения соревнования нам понадобится поле, точно такое же, которое мы использовали при решении Задачи №12 Урока №6 курса "Первые шаги" . Вы можете скачать макет подходящего поля на странице "Макеты полей для тренировки и соревнований" нашего сайта, а затем распечатать его в цифровой типографии на баннерной ткани, либо изготовить поле самостоятельно, используя плакатную бумагу подходящего размера, большой циркуль, линейку и черную тушь.
Жестяные банки лучше всего обклеить по периметру самоклеящейся бумагой (нам понадобятся 2 - 4 банки белого цвета и столько же - черного).
Реквизит для урока готов!
11.2 Конструирование робота для конкретного вида соревнования.
На первоначальном этапе решения задачи давайте сделаем пару маленьких допущений: не будем обращать внимание на удовлетворение требования к размерам нашего робота, ограничимся поиском и выталкиванием всего одной кегли.
Наступает важный этап моделирования робота - перед нами стоят две взаимосвязанных задачи:
- Разработка ключевого алгоритма поведения нашего робота;
- Разработка механической конструкции робота, позволяющей реализовать требуемое поведение.
Рассмотрим следующую поведенческую модель:
Следовательно, наш робот должен:
- уметь вращаться на месте вокруг своей оси;
- уметь двигаться прямолинейно;
- уметь обнаруживать предмет, удаленный на некоторое расстояние;
- уметь обнаруживать границу поля.
Данные требования диктуют нам условия конструкции робота:
- для реализации первых двух условий применим уже известную нам подвижную платформу, использующую два больших мотора и вращающуюся опору (робот-тележка);
- для обнаружения кегли воспользуемся одним из имеющихся в наличии датчиков: инфракрасным или ультразвуковым;
- границу поля нам поможет обнаружить датчик цвета.
Всем условиям в полной мере отвечает наш робот, которым мы пользовались, когда проходили курс "Первые шаги".
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Вы можете воспользоваться предложенной инструкцией или собрать собственного робота, отвечающего определенным нами требованиям к его конструкции. В процессе сборки конструкции не забудьте подключить моторы и датчики к модулю EV3: левый мотор - к порту "B", правый мотор - к порту "C", ультразвуковой или инфракрасный датчик - к порту "2", датчик цвета - к порту "3".
После сборки робота приступим к созданию программы.
11.3 Создание программы для соревнования "Кегельринг".
Подробно пропишем последовательность действий нашего робота для обнаружения одной кегли на поле:
- вращаться вокруг своей оси по часовой стрелке, пока впереди расположенный датчик не обнаружит кеглю;
- остановиться напротив кегли;
- двигаться вперед, пока датчик цвета не обнаружит черную границу поля;
- остановиться;
- двигаться назад в центр поля.
Приступим к реализации и отладке п. 1, 2 - научим нашего робота обнаруживать кеглю и останавливаться точно напротив. Сначала нам необходимо выбрать пороговое значение для обнаружения кегли напротив нашего робота. Для этого загрузим среду программирования, создадим новый проект - "lessons-2", новую программу в проекте назовем "lesson-11". Подключим робота к среде программирования, затем установим его точно в центр поля, поставим напротив робота кеглю.
В нашем случае ультразвуковой датчик в режиме "Расстояние в сантиметрах" показывает значение - 25,9 (Рис. 1 поз. 2).
Рис. 1
Инфракрасный датчик в режиме "Приближение" показывает значение - 48 (Рис. 2 поз. 2)
Рис. 2

Рис. 3
Верхний ряд блоков отображает показания моторов, подключенных к модулю EV3 (Рис. 4 поз. 1).
Нижний ряд блоков отображает показания датчиков, подключенных к модулю EV3. Управляя клавишами модуля EV3 можно перемещаться между показаниями для получения подробной информации о датчике и выводимом значении (Рис. 4 поз. 2).

Рис. 4
Теперь мы можем запрограммировать нахождение роботом кегли:
Ультразвуковой датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком "Независимое управление моторами""Зеленой палитры", Режим работы блока установим "Включить", значение мощности для порта "B" установим равным 30, значение мощности для порта "C" установим равным -30(Рис. 5 поз.1),
- Для поиска кегли используем программный блок "Ожидание""Оранжевой палитры" в режиме "Ультразвуковой датчик - Сравнение - Расстояние в сантиметрах". Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 35(Рис. 5 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок "Независимое управление моторами""Зеленой палитры" выключим моторы (Рис. 5 поз. 3).

Рис. 5
Инфракрасный датчик
- Для того, чтобы заставить робота вращаться вокруг своей оси, воспользуемся программным блоком "Независимое управление моторами""Зеленой палитры", Режим работы блока установим "Включить", значение мощности для порта "B" установим равным 30, значение мощности для порта "C" установим равным -30(Рис. 6 поз.1),
- Для поиска кегли воспользуемся программным блоком "Ожидание""Оранжевой палитры" в режиме "Инфракрасный датчик - Сравнение - Приближение". Для гарантированного нахождения увеличим пороговое значение срабатывания датчика до 55(Рис. 6 поз. 2)
- После того, как робот окажется напротив кегли, используя программный блок "Независимое управление моторами""Зеленой палитры" выключим моторы (Рис. 6 поз. 3).

Рис. 6
Загрузим получившуюся программу в робота и запустим её на выполнение. Раз за разом, выполняя программу, мы можем заметить, что наш робот останавливается не совсем точно напротив банки. Связано это с тем, что датчик может обнаруживать предмет не только строго напротив себя, а и на некотором отклонении от направления взгляда датчика. В этом случае можно, либо после остановки робота немного довернуть его на необходимый угол, используя дополнительный блок "Независимое управление моторами", либо постепенно увеличивать скорость вращения, подбирая параметр мощность (Рис. 5, 6 поз. 1), пока робот не станет останавливаться точно напротив кегли. Например, нам потребовалось увеличить мощность до 50 единиц для робота, собранного из образовательной версии набора, и до 40 единиц для робота, собранного из домашней версии набора.
Переходим к реализации п. 3, 4 нашей последовательности действий.
Двигаться вперед и останавливаться при пересечении черной линии мы уже научились, когда разбирали Задачу №11 Урока №6 курса "Первые шаги". Установим робота таким образом, чтобы датчик цвета находился точно над черной границей поля и измерим его значение в режиме "Яркость отраженного света" любым удобным вам способом, рассмотренным выше. В нашем случае получилось значение, равное 7. В качестве порогового значение примем число 10.
Добавим к нашей программе обнаружения кегли следующие программные блоки:
- Для того, чтобы заставить робота двигаться прямолинейно, воспользуемся программным блоком "Рулевое управление""Зеленой палитры". Режим работы блока установим "Включить", параметр "Рулевое управление " = 0, параметр "Мощность" = 50. (Рис. 7 поз. 1)
- Для поиска датчиком цвета черной границы воспользуемся программным блоком "Ожидание""Оранжевой палитры" в режиме "Датчик цвета - Сравнение - Яркость отраженного сигнала", параметр "Тип сравнения" = 4, параметр "Пороговое значение" = 10. (Рис. 7 поз. 2)
- После того, как робот пересечет черную линию, используя программный блок "Рулевое управление""Зеленой палитры" выключим моторы (Рис. 7 поз. 3) .

Рис. 7
Наш робот научился успешно находить и выталкивать кеглю, но текущая конструкция не позволяет роботу уверено её фиксировать при транспортировке за пределы поля. Давайте немного доработаем конструкцию робота, прикрепив к нему клешни, которые увеличат ширину захвата и позволят прочно удерживать кеглю. На переднем бампере робота слева и справа закрепите детали, как показано на рисунках ниже:
Lego mindstorms EV3 Home

Lego mindstorms EV3 Education

Теперь наш робот просто отлично справляется со своей работой! Осталось только научить его возвращаться в центр круга.
Рис. 8
Программный блок "Вращение мотора" "Желтой палитры" позволяет получать и обрабатывать это значение в программе. Режим "Сброс" программного блока "Вращение мотора" устанавливает нулевое значение датчика и отсчет оборотов начинается сначала. (Рис. 9)

Рис. 9
Воспользуемся этой возможностью: если мы сбросим показание одного из датчиков моторов в 0 (в данном случае можно обнулить значение любого из моторов "B" и "C", ведь робот поедет прямо, а значит оба колеса провернутся на одинаковое значение), то после остановки робота над черной линией, можно будет получить значение датчика в "Градусах" или "Оборотах" и, подав его на вход соответствующего параметра блока "Рулевое управление", заставить робота проехать точно такое же расстояние. А для того, чтобы робот двигался назад, необходимо изменить значение параметра "Мощность" на отрицательное значение.
Внесем необходимые изменения в нашу программу:
- Перед началом движения вперед сбросим в 0 показания датчика вращения мотора, подключенного к порту "B"(Рис. 10 поз. 1).
- После остановки на черной границе поля считаем расстояние, пройденное мотором "B" в градусах (Рис. 10 поз. 1).
- Полученное значение подадим в параметр "Градусы" программного блока "Рулевое управление", значение параметра "Мощность" = -50(Рис. 10 поз. 1)!

Рис. 10
Загрузим получившуюся программу в робота и убедимся, что робот нашел кеглю, вытолкал её за пределы поля и вернулся в центр поля!
Для того, чтобы заставить нашего робота выталкивать требуемое количество кеглей, все наши программные блоки поместим внутрь программного блока "Цикл" "Оранжевой палитры". Режим программного блока "Цикл" установим в значение "Подсчет", параметр "Подсчет" установим равным количеству кеглей (Рис. 11, 12 поз. 1) Для удобства отображения на экране нам пришлось оформить программу в две строки - вы же вполне можете сложить её в одну строку.

Рис. 11

Рис. 12
Программа готова!
11.4 Соревнование "Кегельринг" с дополнительм условием
На сайте myROBOT.ru опубликованы еще два регламента проведения соревнования "Кегельринг": "Кегельринг-КВАДРО" и "Кегельринг-МАКРО". Основное условие - необходимо выталкивать за пределы поля белые кегли, оставляя на месте черные.
Как научить робота на расстоянии определять цвет кегли? Можно впереди, по ходу движения робота расположить еще один датчик цвета и, приблизившись к кегле на расстояние 1 - 2 см, определить её цвет, теряя при этом драгоценное время, отведенное на выполнение задания. Но, если вы внимательно изучили п. 8.2 Урока №8 курса "Первые шаги", то уже знаете, что на показания инфракрасного датчика в режиме "Приближение" влияет также цвет предмета. Проведем эксперимент: установим робота с инфракрасным датчиком в центр поля, напротив поместим белую кеглю и зафиксируем показания датчика. В нашем случае это значение равно 49. Теперь напротив робота установим черную кеглю - показание датчика изменилось и теперь, не смотря на одинаковое расстояние, составляет 64. Следовательно, для успешного обнаружения белых кеглей и игнорирования черных, необходимо выбрать в качестве порогового - значение, находящееся между этими числами. Число 55 полностью удовлетворяет этому условию. Нам даже не придется переделывать основной алгоритм программы! Попробуйте и убедитесь в этом сами!
К сожалению, решить данную задачу с использованием только ультразвукового датчика, не представляется возможным.
Заключение:
При решении практической задачи робототехники успех приходит только при многократном тестировании робота. В процессе тестирования возможно возникновение ситуации, когда вам потребуется вносить изменения не только в программу, но и конструкцию робота. Не бойтесь экспериментировать, не бойтесь ошибаться. Вдумчивый анализ ошибок обязательно принесет вам положительный результат! Удачи!
Здравствуйте, а что делать, если надо возвести в цикл так, чтобы при совершении одного оборота, без встречи кегль, робот останавливался
Здравствуйте буквально позовчера я ездил на серевнования в месте с напарником мы учавствовали в серевнование робот в мешке. К сожалению не выйграли . И ещё там был кегелеринг у всех робота крутились на один оборот вокруг своей оси и проезжали между банками. Спасибо за статью дома все сделал и всё работает
Всё на русском языке о роботах LEGO MINDSTORMS EV3 и NXT: различные инструкции к конструкторам разных версий, информация о версиях, скриншоты готовых моделей, фото и видео занятий по робототехнике. Также мы выкладываем пошаговые инструкции по созданию и программированию разных видов роботов лего из конструктора версии 8547. У нас можно скачать поурочное планирование факультатива робототехники для учеников 6-8 классов. Планируем добавить всю необходимую для роботехника-любителя информацию. Всё будет доступно всегда и бесплатно!

Концепт роботизированного пылесоса Puppy
Полет мысли творческого человека непредсказуем, источником вдохновения для художника может послужить все, что угодно. К примеру, дизайнер Хьюн Сек Ким (Hyun-Seok Kim) пре.

В Японии работают над роботом-хамелеоном
Исследователи из японского университета Цукуба Томофуми Хатакеяма и Хироми Мочияма работают над созданием робота-хамелеона. До завершения дело еще далеко, специалистам по.
Рубрика: Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXT
Конструктор Lego WeDo
Конструктор Lego WeDo 2.0
Программирование и алгоритмы для lego mindstorms nxt 2.0
Соревнования роботов
- Соревнования
- Настраиваем робота
- Готовимся к кегельрингу
- Правила соревнования роботов под названием 'Очисти круг'
- Регламент соревнования ГОНКИ ПО ЛИНИИ
- Регламент соревнования КЕГЕЛЬРИНГ
- Регламент соревнования КЕГЕЛЬРИНГ КВАДРО
- Регламент соревнования КЕГЕЛЬРИНГ МАКРО
- Регламент соревнования МИНИСУМО (ВАРИАНТ 1)
- Регламент соревнования МИНИСУМО (ВАРИАНТ 2)
- Регламент соревнования ПЕРЕТЯГИВАНИЕ КАНАТА
- Регламент соревнования ПОДЪЁМ ПО КАНАТУ
- Регламент соревнования СЛАЛОМ ПО ЛИНИИ
- Регламент соревнования ТЕННИС
- Регламент соревнования роботов по РОБОРЭГБИ
Поля для соревнований EV3, NXT и arduino
Ниже представлены поля для подготовки и проведения соревнований по робототехники возрастных категорий: младшая, средняя, старшая. Рекомендуем использовать поля в школах, лицеях и центрах дополнительного образования детей для подготовки и проведения школьных или городских соревнований.
Научив, конструировать роботов и создавать программы на этих соревновательных полях Вам будет гораздо проще перейти на ступеньку выше - подготовку и участие в районных, краевых / областных соревнованиях.
Часто конструкция и программа робота частично подходит на крупных соревнованиях. Экономится огромное количество времени. Вместо того, чтобы с нуля конструировать машину и писать программу Ваши подопечные могут заняться только доведением своего творения до логического конца.
Из личного опыта: при консультации с судьями они часто удивляются стремлению детишек уничтожить все наработки и сконструировать новое устройство . По их мнению - это лишняя трата времени. Более половины "горе конструкторов" не успевают за 1-2 дня соревнований создать что-либо новое. Это и понятно, ведь даже взрослый человек не сможет сделать профессиональную робототехническую машину в стрессовой ситуации и, одновременно сжатом по времени промежутке.
Поэтому, мой Вам совет как учителю робототехники - тренировки , тренировки и ещё раз тренировки на этих полях. Вот залог успеха! Наши поля для робототехники скачать можно абсолютно бесплатно. Пользуйтесь, удачи Вам, робототехники!
-
Макет поля для соревнования по скоростному движению вдоль черной линии
Поле позволяет одновременно стартовать двум роботам. Правила соревнований предполагают, что робот должен пропустить соперника, находящегося на перекрестке.
Размер поля: 2400 x 1200 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
В дисциплине Кегельринг задача робота - за наименьшее время вытолкнуть кегли за пределы черной линии. Банки расставлены внутри круга и, обычно, это банки из под напитков 0,33 л. оклеяные клеящей или цветной бумагой.
В дисциплине Сумо побеждает тот робот, который вытолкнет соперника из зоны круга за пределы черной линии первым.
Размер поля: 1250 x 1250 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
Макет поля для отработки алгоритмов движения вдоль черной линии
Поле в дополнение к перекрёсткам и извилистым линиям содержит блоки инверсной линии (белая линия на черном поле) и штриховую разметку. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время.
Размер поля: 2440 x 1220 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
Данное поле более сложное и содержит множество перекрестков и извилистых линий. В правилах соревнований победа присуждается за проезд по заданной траектории за наименьшее время.
Размер поля: 2440 x 1220 мм.
Файл поля в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
Положения для проведения соревнований, конкурсов и высотавок по робототехнике
Мы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
- Соревнование Твинфлэп
- Лего соревнование Траектория
- Соревнование роботов Шорт Трек
- Соревнование умных машин Сортировщик
- Интеллектуальное соревнование Сапёр
- Соревнование Гусарский турнир
- Соревнование lego nxt / ev3 Лестница
- Соревнование Ралли дистанционно управляемых машин
- Турнир Лабиринт
- Соревнование Гонки Таракароботов минироботов
- Соревнование быстрых автомашин Эстафета
- Соревнование интеллектуальных ботов Футбол
- Соревнование автономных машин Дрэг Рейсинг
- Соревнование умных ардуино и легороботов Боулинг
Инструкции для MINDSTORMS NXT PDF (13 шт.)

- Бот с большими колёсами из картона
- Инструкция для версии 8527 ALFAREX.pdf (классика - робот АЛЬФАРЭКС)
- Пошаговая инструкция "РОБОРУКА" (ROBOARM)
- Пошаговая инструкция "РОБОТ ПАУК" (SPIKE)
- Пошаговая инструкция "МНОГОБОТ" (TRIBOT) pdf
- Инструкция робота-сортировщика цветных шариков (ColourSorter3)
- СЕГВЭЙ из LEGO NXT инструкция pdf скачать
- Инструкция к роботу-многоножке
- Пошаговая инструкция "Робот-многоглазка" (Omnibot_BI.pdf)
- Инструкция lego-nxt-4x4-shassi.pdf
- Инструкция lego-nxt-cattbot.pdf
- Инструкция lego-nxt-uchebniy-robot.pdf
- Видео инструкция "Роборука из лего EV3"
Читайте также: