
Робот из конструктора как сделать
Обновлено: 01.05.2024
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77''
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
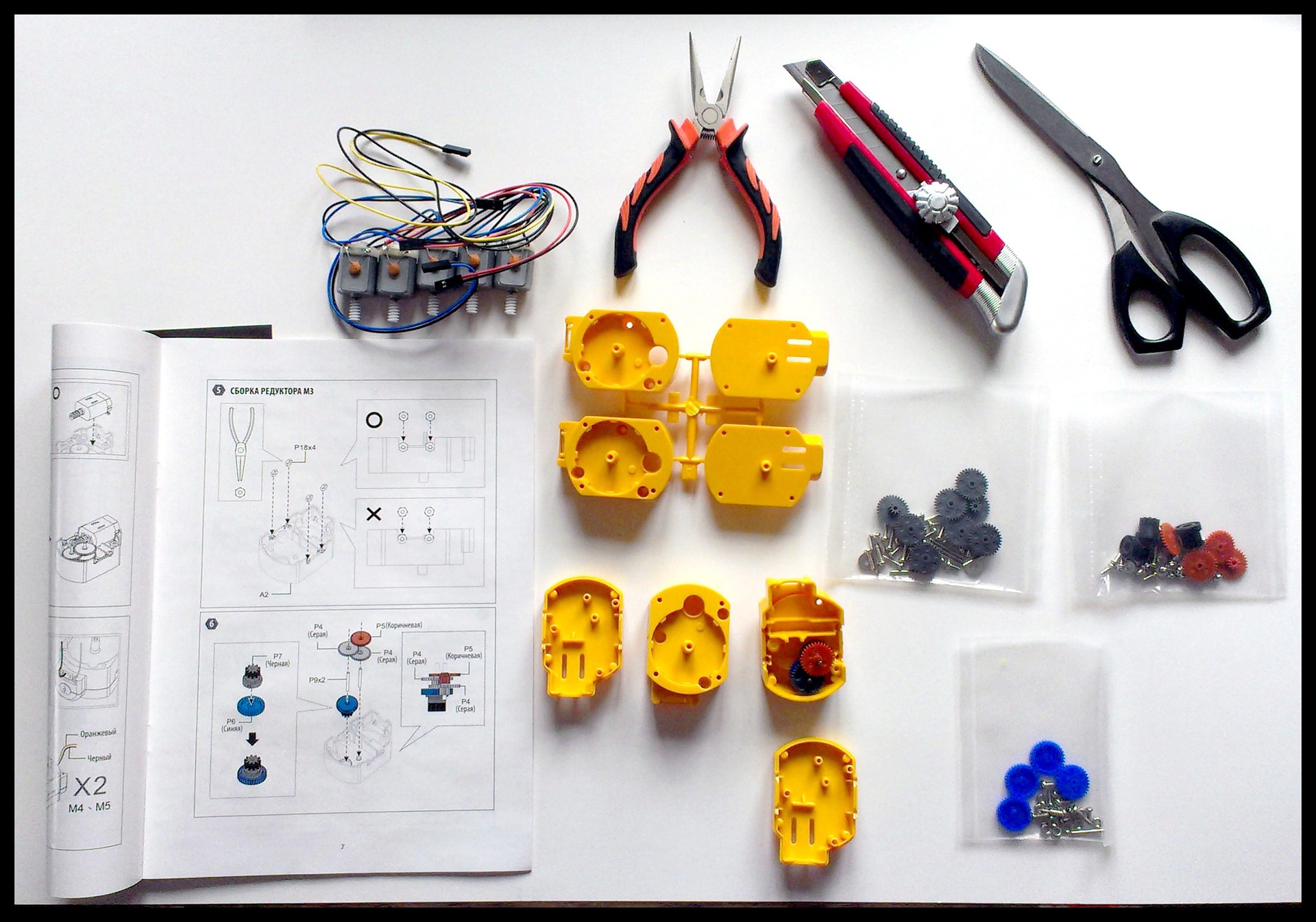
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! :)
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.

Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
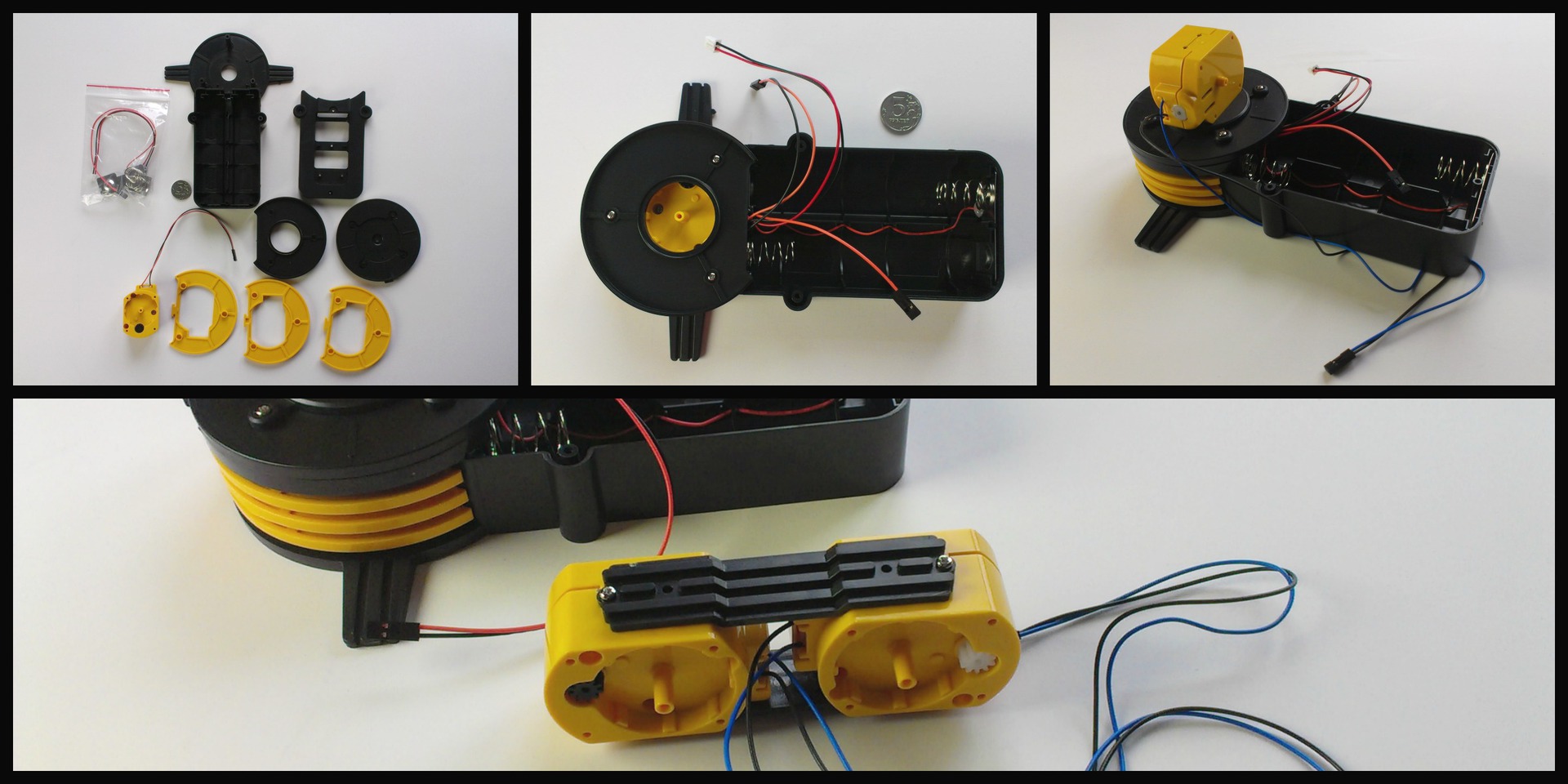
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
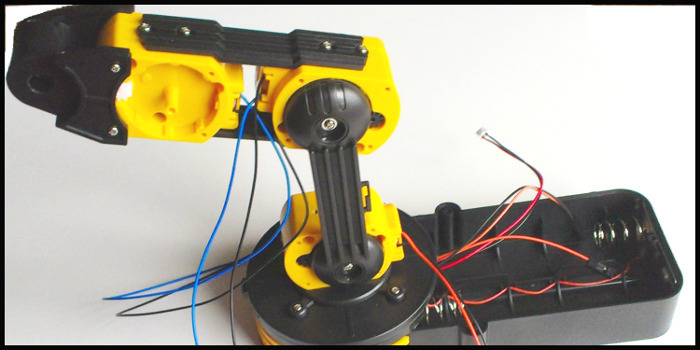
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!

Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
Конструктивно робот – не просто механический человек-гуманоид, запрограммированный на конкретные функции, например, устойчиво передвигаться, совершать примитивные движения и переносить грузы. Идея робота опирается на вооружённого киборга.
Как сделать робота из большого конструктора?
Для изготовления макета настоящего робота из большого конструкторского набора могут потребоваться следующие детали и функциональные узлы, делающие сложный механизм ценным с точки зрения подвижной и управляемой конструкции, а не просто неподвижной статуей, поставленной в детской или мастерской как элемент технико-дизайнерской роскоши.
В качестве примера – крупногабаритные детали конструктора марки «Полесье», похожего на легендарный LEGO. Отличие первых наборов LEGO от «Полесья» в сравнительной компактности первого: «кирпичи» и другие элементы набора схожи по строению с «Полесьем». Но в «Полесье», в отличие от LEGO, присутствуют внутренние перегородки, разделяющие пространство на отсеки, соответствующие площади размещения конкретного шипа. Эти перегородки позволяют укладывать ряды блоков вполовину по посадочному месту, а не целиком, что позволяет сооружать диагональные «лестничные» переходы, не применяя специальные косые, сглаженные и сгруглённые комплектующие. Те, в свою очередь, содержатся далеко не в каждом из конкретных конструкторских наборов. В данном руководстве используется комплект из не менее чем 200 деталей. Выполните следующие шаги.
Соберите две подошвы (ступни) робота. Потребуется два квадратных яруса блоков, поставленные один на другой.
Надстройте над ними голени и бёдра, используя несколько вышележащих рядов блоков. Ноги почти готовы, для наглядности – например, когда показываете процесс сборки детям – предпочтительно использовать разноцветные и высококонтрастные друг по отношению к другу детали.
Соберите нижнюю часть туловища, расположив ряды блоков друг над другом. Длина и ширина этой части по площади равна площади ног конструкции, расположенной на ширине плеч.
Продолжите надстраивать туловище, меняя цвета. Например, нижняя часть туловища – из голубых, средняя – из красных и жёлтых, верхняя – из розовых и также жёлтых элементов. Оставьте посадочное место для рук робота – в один ряд шипов. Туловище собрано.
Приступите к плечам, параллельно наращивая руки из таких же блоков. Руки обычно направлены вперёд, а не свисают по бокам – если это боевой робот, а не производственная его модель.
Соорудив туловище и шею, закончите сборку рук. Поскольку руки не имеют опоры снизу, то они могут отваливаться. Если бы это был одноразовый конструктор, то можно было бы посадить все соединения на эпоксидный клей, зашкурив все стыки наждачной бумагой для наиболее устойчивого сцепления.
Соберите до конца шею и голову. Для головы используется в основном квадратный массив, состоящий из соединённых в обычную «стенку» блоков. По сути, полученный робот толщиной не более стенки дома, если не считать выступы стоп, рук и конструкции, напоминающей автомат.
Присоедините к рукам сборки, обозначающие, к примеру, автомат и пистолет. На голову конструкции присоедините «пирамидку», обозначающую головной убор. Например, красная верхушка служит отсылкой к краповому берету.
Согласно актуальной статистике конструкторы LEGO пользуются рекордной популярностью не только у детей, но и у представителей других возрастных категорий. Благодаря многообразию, продуманности и универсальности деталей, проработанных до мелочей, не возникает проблем с тем, как можно сделать робота из LEGO. Важно, что собрать простую модель легко сможет даже маленький ребенок, создав своими руками удивительную игрушку, и такой робот будет намного интереснее, чем неразбираемый.
Но, как показывает практика, данный процесс строительства конструкций по различным схемам выглядит привлекательным и для взрослых.

Как построить маленькую модель?
Сделать мини-робота, который будет маленьким, но при этом достаточно «удаленьким», очень просто. Для такой поделки можно использовать имеющиеся в наличии детали легендарного конструктора. В принципе результат будет определяться исключительно воображением самого создателя компактного образца фантастической робототехники. При этом сам процесс постройки небольшого робота является максимально простым и включает в себя несколько этапов.

В первую очередь необходимо будет сделать ноги будущего мини-робота. Для этого потребуется:
взять две одинаковых детали, которые внешне похожи на ступни;
прикрепить к каждой из них высокий куб;
выделить коленные узлы;
установить маленькие квадраты.
В качестве примера можно привести следующие схемы.
На ноги необходимо будет установить туловище робота-малыша. Если имеется в наличии гнущаяся деталь LEGO, то изначально устанавливают именно ее.
Следующий этап – это непосредственно формирование туловища конструкции. Здесь важно заметить, что торс должен быть массивным, даже с учетом компактности создаваемой модели.
По желанию можно установить решетки, а также заглушки разных цветов.
Схематически процесс создания туловища и его установка продемонстрированы на рисунках.
Теперь можно приступать к рукам будущей игрушки. Верхние конечности очень удобно делать из сопряженных цилиндров. Завершающими элементами при этом могут стать конусы. Здесь главное – не забыть установить хватающие элементы, то есть кисти. Стоит напомнить, что такие детали присутствуют во многих наборах LEGO. С другой стороны, можно обойтись и без данного пункта, но в таком случае не получится вооружить робота.
Все рассмотренные манипуляции, связанные с формированием рук, отображены наглядно на схемах.
На завершающей стадии останется сделать роботу голову. Ее роль здесь может сыграть обычный кубик, сформированный из двух квадратов. Как интересный вариант, можно по центру конструкции установить голову человечка, если таковая есть в распоряжении.
Кстати, возле головы робота нередко размещают колеса и прочие дополнительные элементы.

Создание большого робота
Может показаться, что создание большой по размерам модели робота окажется сложнее описанного выше процесса. Однако это не совсем соответствует действительности. Здесь, опять же, важно учесть, что постройка роботов, независимо от их габаритов, конфигурации и назначения, – это очень увлекательное занятие, и чаще всего не только для детей.

В принципе такую игрушку вполне можно сделать, используя уже рассмотренную схему, просто задействовав большее число компонентов. С другой стороны, подключив фантазию и воображение, создают самых необычных крупногабаритных роботов. Кстати, в такой ситуации наиболее правильным решением будет доверить проектирование именно юному конструктору.

Как в ситуации с мини-роботом, здесь следует начинать сборку с нижних конечностей. Для формирования ног понадобятся деталь в виде куба с крепежными элементами на каждой стороне, а также 3 круглые серые заглушки и синий квадрат. Важно, чтобы последний был на лицевой стороне срезан. Здесь имеется в виду гладкая поверхность, расположенная под углом 45 градусов.
Все перечисленные детали следует разместить по бокам кубика, как это показано на рисунке.
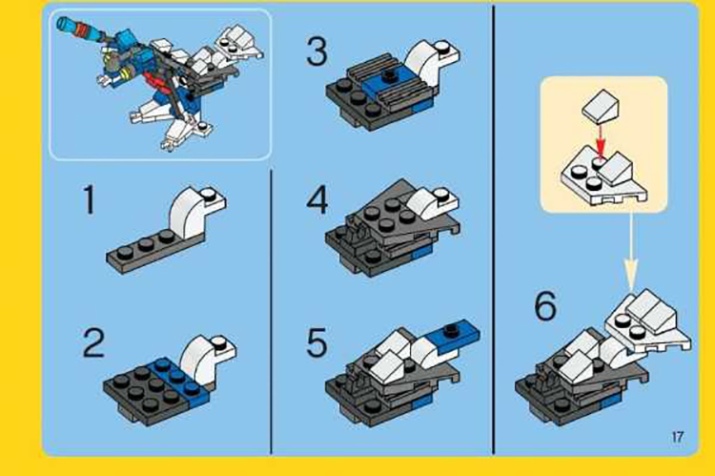
Дальнейшим алгоритм действий выглядит следующим образом.
По бокам устанавливают по одной заглушке, после чего необходимо будет подобрать две скругленные и вытянутые детали, у которых будет по два отверстия и сквозные крепежные элементы на концах. Их соединяют и крепят к установленным ранее заглушкам. Кстати, здесь расположенные сверху отверстия можно заглушить. В итоге могут потребоваться 4 заглушки.
В сквозное отверстие собранного элемента вставляют длинный шток, соединяя эту деталь с цилиндром. Остается на конец штока установить круглую заглушку.
Перемещаясь ниже, монтируемую ногу продолжают серым кубиком. Важно, чтобы у него снизу лицевой плоскости имелось крепление.
Ставят квадрат, имеющий на конце круг. Параллельно в качестве еще одного фиксатора монтируются еще один квадрат, а также деталь с треугольной лицевой стороной. В данном случае имеется в виду срезанный под углом 45 градусов квадратик.
Посредством установленного круглого крепления монтируют конструктивный элемент, состоящий из двух кубиков.
Добавляют снизу еще одну пластину, которая обеспечит максимальную устойчивость.
Весь описанный процесс сборки продемонстрирован на рисунке.
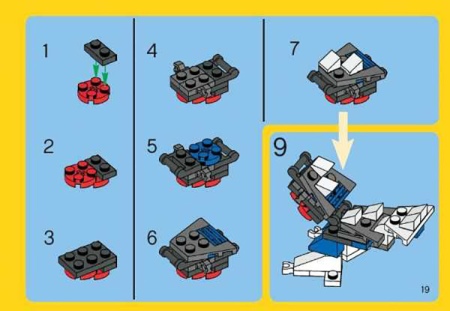
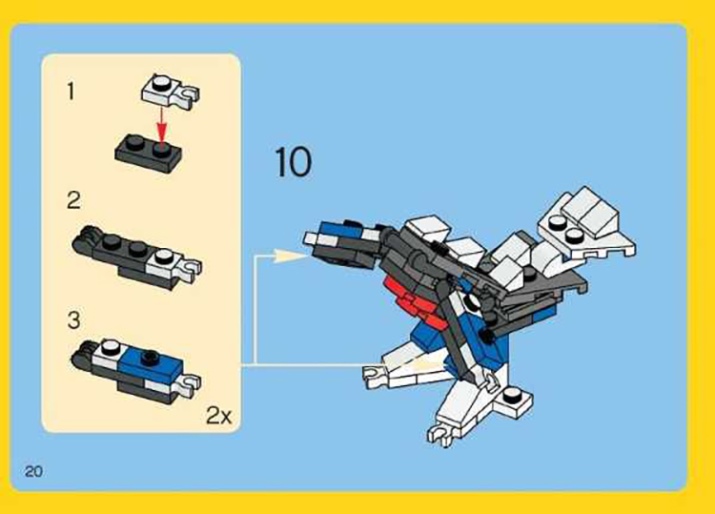
Следующий этап строительства большого робота – это создание его туловища. Эта процедура состоит из следующих действий.
Над собранными ранее ногами робота устанавливается деталь в виде круга с четырьмя квадратами.
В центре этого круга располагается пластина из двух квадратных элементов.
По бокам выстраиваются высокие кубики, между которыми необходимо установить один куб с дополнительным креплением или же отверстием на лицевой стороне.
Выкладываются по двум флангам элементы, сформированные из двух квадратов.
Сверху ставят еще одну круглую деталь.
На ней крепится массивная пластина, составленная из 6 квадратных деталей, а с тыльной стороны надо будет установить 2 квадрата с ручкой. Речь идет о том, что задняя часть должна оказаться немного выступающей за габариты всей конструкции. А вот под нее ставят элемент, имеющий трапециевидную форму, срезанный на конце. Важно, чтобы его вершина оказалась расположенной по направлению вниз.
На противоположной стороне устанавливается аналогичная деталь.
В центре помещается один круг, который закрывается элементом серого цвета, имеющим соответствующий размер.
Крепятся срезанные серые кубы так, чтобы острые края были направлены вверх.
Как правильно собрать туловище, показано здесь.
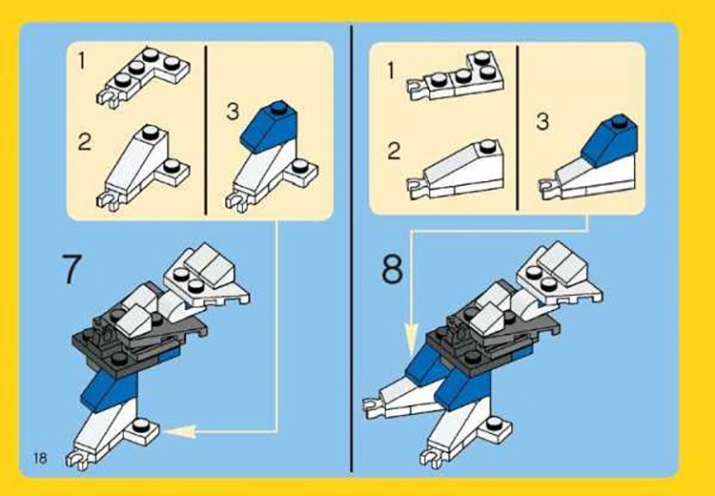
Теперь можно перейти к созданию верхних конечностей игрушки. Наглядно данный процесс можно увидеть на рисунке.
Как в ситуации с остальными частями создаваемой конструкции, сборка рук тоже не вызовет каких-либо трудностей. И здесь, опять же, все будет зависеть от фантазии юного или же более взрослого автора проекта. Сам же процесс включает в себя следующие шаги.
Берут элемент в виде небольшой полосы на два крепления.
Сверху монтируют квадрат с хватательным элементом, который будет выполнять функции кисти робота.
Устанавливают маленькую деталь с заглушенным концом.
Как показано на рисунке выше, делают конструкцию в двух экземплярах.

Сборка боевого робота
Главное отличие такого образца техники, пусть и игрушечного, заключается в способности эффективно защищаться от нападений и атаковать самому. Как правило, с вооружением такого бойца проблем не возникает, поскольку во многих наборах его хватает. Для создания военной модели робота потребуются:
белый или прозрачный срезанный треугольником кубик – 1;
одинарные квадраты белого цвета – 2 (важно, чтобы один из них имел ровную верхнюю плоскость);
высокие кубы (одинарные) – 2;
сдвоенные кубы – 3;
высокие цилиндры – 2;
«краники» – 4 (по 2 серых и черных);
усеченные конусы – 2;
одинарные кубы, имеющие так называемые захватки – 2;
черные скругленные «квадраты» – 2;
кубы со срезанными (треугольными) верхами серого цвета – 2;
плоский сдвоенный куб серого цвета – 1;
кубы с пятью креплениями черного цвета – 3.

Подготовив все необходимое, можно приступать к самой сборке боевого робота. Первым делом концентрируются на формировании головы, постепенно переходя к туловищу.
Порядок действий будет следующим.
Взять два высоких кубика, имеющих со всех сторон крепления. Важно соединять детали с боков, а не ставить их друг на друга. Низ одного куба должен сочленяться не с верхом, а с боковой стороной второго.
На боковые крепления верхнего куба установить «круглые квадраты». Подобным образом формируются плечи будущего робота. Можно, конечно же, использовать детали обычной (квадратной) формы, но в таком случае руки модели не будут поворотными.
Добавить к плечам захваты.
Рассмотренные этапы сборки отображены наглядно на рисунках.

Следующая стадия – сборка ног, которые также можно сделать двигающимися в «суставах». Все необходимые детали соединяются так, как это продемонстрировано на рисунке.
После останется только прикрепить стопы, которыми станут кубы со срезанными концами.
Схема сборки ног боевого робота выглядит следующим образом.

Теперь самое время вернуться к созданию верхних конечностей будущей игрушки. Именно в них будет размещаться вся огневая мощь этой боевой машины. Само оружие можно сформировать из прямоугольных элементов.
Завершающий этап строительства настоящей боевой машины.
Подводя итог, стоит заметить, что рекомендуется верхние, вооруженные «до зубов» конечности игрушки развести в стороны. Это минимизирует риск того, что руки могут сломаться или же будут мешать. На этом создание самодельного боевого робота можно считать завершенным.
Другие идеи
Здесь стоит рассмотреть, как быстро построить простейший вариант робота из «кирпичиков» LEGO. Такая модель станет оптимальным решением создания игрушки, когда у ребенка ограниченный ассортимент деталей. Как было отмечено, все элементы этих легендарных конструкторов имеют определенное предназначение.
При постройке простого робота можно подбирать детали одного цвета или схожих оттенков. Однако можно создать и креативную модель.

Первоначальный этап сборки предусматривает формирование туловища и выглядит следующим образом.
Подобрать элемент из двух блоков по четыре кубика в каждом. Сзади прикрепить два высоких кубика, то есть имеющих по два квадрата, а на фронтальной части установить деталь аналогичной высоты во всю длину конструкции. Важно, чтобы у последней крепеж был спереди и вверху.
На втором ярусе закрепить еще один высокий кубик (на один квадратик), а также аналогичный по высоте сдвоенный элемент и еще одиночный кубик. Следует помнить о наличии по бокам одинарных запчастей отверстий для рук.
На фронтальной стороне установить длинную деталь из четырех квадратов.
Поверх всей конструкции разместить две пластины.
Процесс постройки туловища.
После сборки торса переходят к нижним конечностям робота.
Взять фрагмент на три блока по два квадрата.
Закрепить три пластины, имеющие по одному креплению в центре. Эти детали должны расположиться под прямым углом к основе.
Подобрать для создания ступней детали на три секции (желательно, чтобы они отличались по цвету).
Сверху установить угловую деталь, которая рассчитана на два куба (верхняя часть первого срезана под 45 градусов). В результате должен получиться конструктивный элемент, напоминающий тапок.
За собранным фрагментом разместить квадрат, который позволит выровнять форму получившегося тапка.
На оставшемся свободным месте закрепить сдвоенный кубик другого цвета.
Сочленить нижние конечности с уже собранным ранее торсом.
Вот так схематически выглядит сборка ног робота.
Для создания рук робота потребуется:
в крепежные отверстия, расположенные по бокам, поместить круглые элементы, внешне напоминающие автомобильные фары;
прикрепить узкую деталь на четыре квадрата;
на сформированной основе установить черные квадраты, на концах которых должны находиться захваты.
Руки собирают по следующей схеме.
Следующий шаг в строительстве робота – это формирование его головы. Для этого поверх туловища устанавливается любая деталь, которая внешне будет похожа на соответствующий элемент собираемой конструкции. Подвижную голову делают из комплектующих с круглым (вращающимся) механизмом.
Создание головы отображено на этом рисунке.
На последнем этапе можно уделить внимание оформлению грудной клетки робота. Здесь можно использовать практически любые имеющиеся элементы. Это могут быть, к примеру, решетки и разноцветные заглушки, имитирующие кнопки. Так же эффектно будут смотреться плоские детали в виде пластин. По желанию создателя робота можно вооружить.
Завершение постройки простого робота.
Не секрет, что трансформеры покорили сердца широкой зрительской аудитории, и дети (актуально как для мальчиков, так и для многих юных представительниц прекрасного пола) не стали в данном случае исключением. Благодаря наборам LEGO у каждого поклонника этих роботов может появиться собственный и при этом самодельный Оптимус Прайм. Естественно, изначально необходимо будет позаботиться о наличии всех необходимых для сборки деталей. Кстати, этот процесс нередко увлекает всю семью. Ниже будет наглядно показано, как можно довольно быстро построить трансформера.
Начальная стадия создания популярного робота.

Сборка трансформера.
Для окончательного завершения всех работ необходимо просто поставить сделанного Оптимуса на ноги. Если необходимо будет трансформировать его в машину, то действуют по обратной схеме.
Естественно, рассмотренные выше варианты строительства роботов – это далеко не полный перечень возможностей, которые предоставляет любителям конструирования LEGO. И здесь уникальность моделей будет определяться не только габаритами и количеством использованных при сборке деталей. Имеется в виду создание механизированных и управляемых конструкций. В итоге нередко миниатюрный робот с интересными функциями произведет на ребенка и его родителей лучшее впечатление, чем его большой родственник.
Речь идет о том, что разработчик позаботился о доступности, помимо стандартных деталей, таких элементов, как контроллеры, различные датчики, моторчики и специальное программное обеспечение.


Примеры самоделок роботов из Lego можно найти в следующем видео.

Конструктор LEGO – это хобби и увлечение очень многих людей: и детей, и взрослых. Из него можно построить новую полноценную игрушку, например: машину или робота. О том, как сконструировать из LEGO трансформера, рассказывается в статье.
![]()
![]()
Как построить простого робота?
Дети часто собирают из разных наборов что-то новое. Пусть конструкция машины или фигурки, сделанная своими руками из разных модулей, не такая продуманная, как у покупных моделей, зато вариантов игр с ней юный изобретатель находит гораздо больше. В помощь родителям и тем, кто исчерпал свою фантазию, предлагаем несколько схем по сборке фигурок из LEGO.
Простой робот
Потребуется следующий набор:
![]()
![]()
![]()
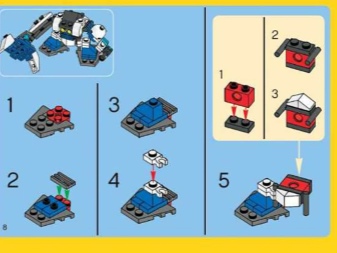
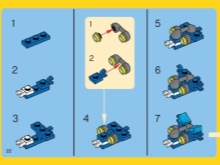
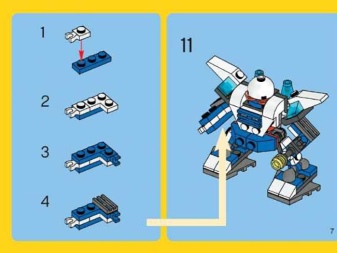
Опишем поэтапную схему сборки.
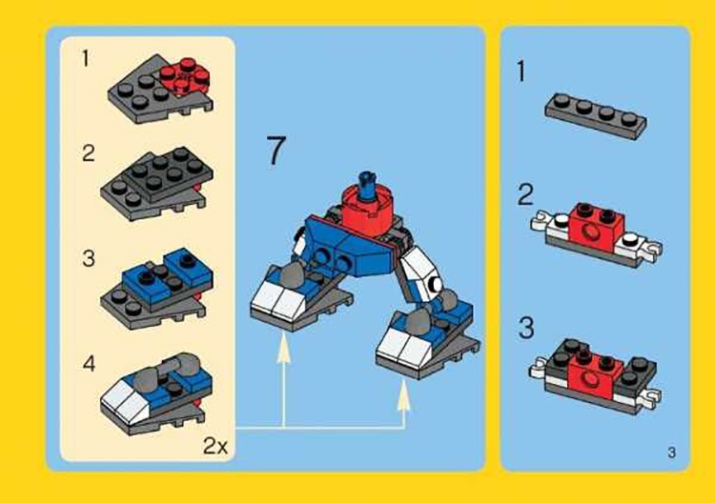
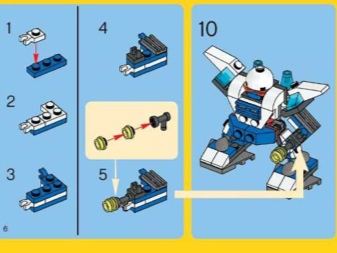
- Возьмем 1-й набор. На половинке круглой детали с 4 бугорками крепится выпуклая овальная, а на другой – квадратик с 2-мя отверстиями.
- В отверстие овальной панельки вставляют квадрат с выступающей скобкой.
- В скобу крепится черный прямоугольник, а сверху – серый рифленый фрагмент.
- Сбоку в квадрат вставляют стержень и накладывают изогнутый фрагмент с двумя выступами.
- В результате должен получиться вот такой пулемет, их потребуется 2 шт.
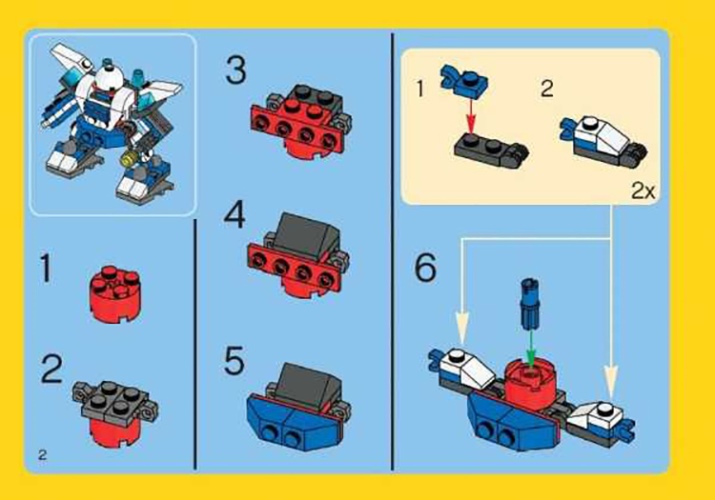
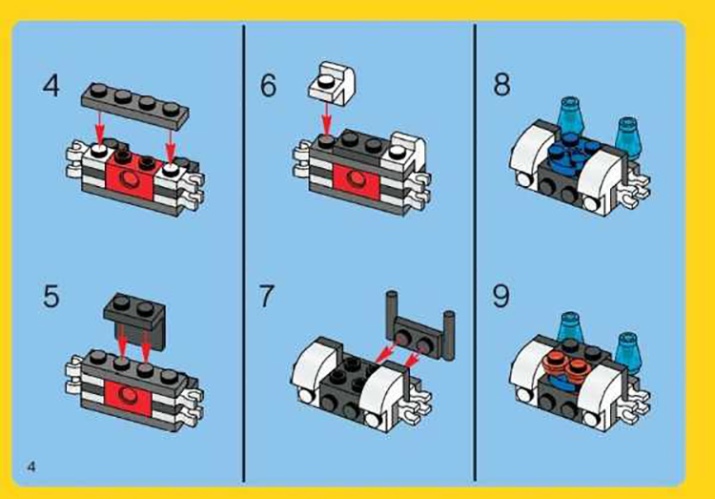
- Собираем корпус: для этого нужен комплект со второго фото.
- Устанавливаем квадратный элемент на вытянутый с двумя бугорками, с одной из сторон крепится треугольный прозрачный модуль, а с другой – такой же матовый.
- Трапецию присоединяем снизу, эта часть корпуса готова.
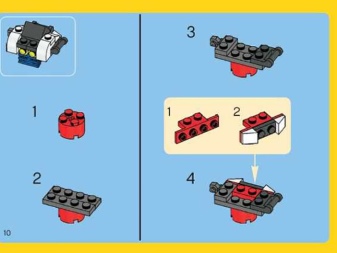
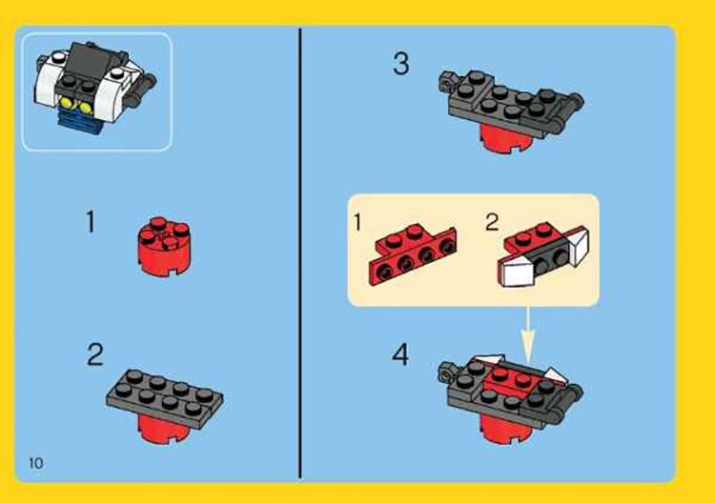
- Переходим к следующей сборке, берем набор с 3 фото.
![]()
![]()
![]()
- Маленькую деталь со скобкой крепим к прямоугольной, а наверху ставим треугольник.
- К прямоугольнику с боковины крепится пластинка со скобой, а на нее – треугольник.
- Цилиндр вставляем в отверстие снизу, а поверху — небольшой треугольник.
- Надо 2 таких.
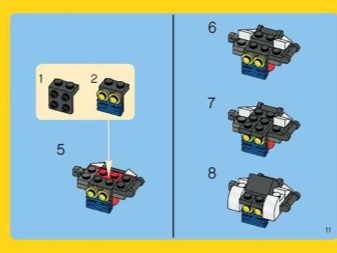
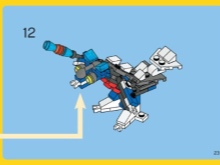
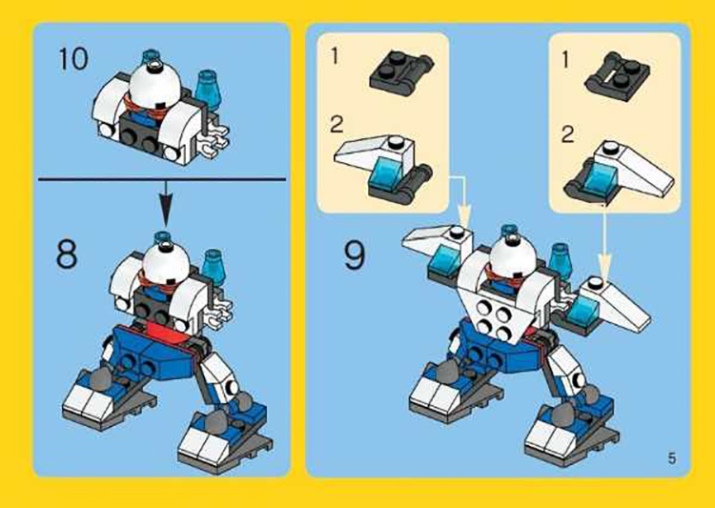
- Теперь собираем киборга.
- Для этого потребуется руль от мотоцикла. Сбоку на стержни прикрепляем ноги.
- В середину устанавливаем корпус.
- К корпусу прикрепляем руки-пулеметы.
Должен получиться вот такой кибервоин.
![]()
![]()
![]()
Огромной популярностью в мире сейчас пользуются трансформеры — это роботоподобные персонажи из комиксов.
Мультсериалы о роботах, способных преобразовываться в автомобили, смотрят дети разного возраста. Как сделать игрушку, которую можно превратить в машину, сейчас узнаем.
Мини-трансформер
Для создания фигурки трансформера потребуется:
![]()
![]()
Распишем последовательность сборки.
- Берем квадратик с отверстиями и устанавливаем на ней элемент в виде шайбы.
- Поверх нее ставится такая же, но из прозрачного пластика.
- Сверху крепят плоский квадратик.
- Сбоку ставится закругленный модуль с небольшим стержнем, к нему прикрепляется двойной прямоугольник со скобочкой.
- На противоположной стороне расположить аналогично панельку с креплением.
- Два небольших треугольника надо установить изнутри конструкции.
- Берутся две небольшие детали с боковой скобой и крепятся снаружи.
![]()
![]()
![]()
- На собранную основу прикрепляют 4 колеса.
- Накладывают поверх одной из половинок четырехугольник.
- Берут 2 скобки и соединяют с округлыми пластинками с особым креплением.
- Их размещают наверху квадратной панельки, после — маленький прямоугольник.
- Затем к особым выемкам присоединяют два квадратика с рожками, а в нижней части крепят длинный бампер.
- Два цилиндра ставят вверху, на них – еще два квадрата с зубцами.
- Над бампером устанавливают две прозрачные пластины, а сверху — два небольших гладких прямоугольных фрагмента.
- Поделка готова.
![]()
![]()
![]()
Ее можно трансформировать, как это показано на фото.
На самом деле небольшого робота можно собрать даже по стандартной схеме из LEGO – хватило бы только необходимых модулей на поделку.
![]()
![]()
![]()
Как собрать Оптимуса Прайма?
Яркие и харизматичные персонажи из многочисленных сериалов про трансформеров выпускаются брендом LEGO довольно давно. Но самодельные игрушки, построенные из стандартных кирпичиков, все равно обладают особой притягательностью. Несмотря на покупные модели, дети продолжают создавать своими руками новые варианты конструкций. Для тех, кто хочет попробовать сделать трансформера из LEGO (из имеющихся в арсенале наборов), можно предложить несколько вариантов.
Самый известный из все роботов, бессменный предводитель автоботов пользуется огромной популярностью у детей. Чтобы собрать фигурку, которая трансформируется, понадобятся кирпичики красные, синие и серые, но подойдут и других цветов. Все элементы из этой схемы довольно часто встречаются в разных комплектах. Потребуется следующее. Из каждого отдельного набора будут собираться определенные части автобота.
![]()
![]()
![]()
![]()
![]()
![]()
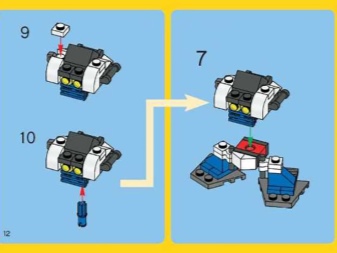
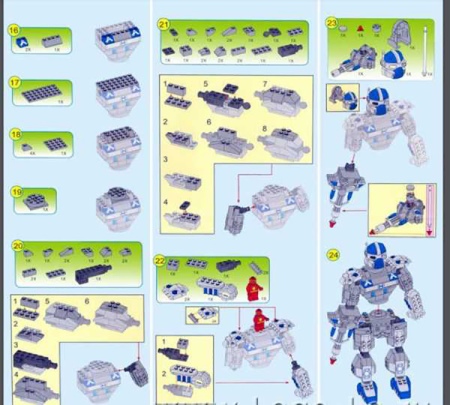
Берется 1 набор деталей, и собирается голова Оптимуса. На кубик с отверстиями с одной из сторон устанавливают серый треугольник — это лицо автобота. С противоположной — прикрепляют плоский квадрат. Снизу ставят выпуклую шайбу, а сверху – синий треугольник. По бокам устанавливают 2 длинные полоски — это шлем. Из 2 комплекта делают части бампера в двух экземплярах. На пластину с 3 выступами перпендикулярно крепится панелька с двумя делениями. На нее поместить еще одну поменьше. На пластину с 3 выступами кладут сверху с 2, в оставшуюся выемку поместить прозрачную шайбу — это фара. На перпендикулярную деталь ложится гладкий прямоугольник. Оставшиеся два бугорка закрывают решеткой.
Из 3 комплекта изготавливаются 2 трубы для тягача. На модуль с двумя выступами крепят квадратный, а поверх — еще один со скобкой и еще один. На свободное место рядом ставится кубик. Поверх устанавливают квадрат с отрезанной гранью. А наверху – плоский. На стержень надевают две шайбы — это труба. Трубу вставляют в скобы.
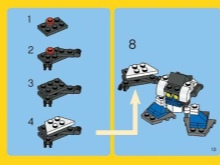
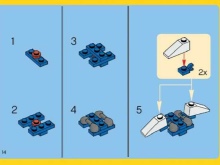
Из 4 комплекта делаются колеса, их создают в двух экземплярах. Берут панельку с 2 бугорками и боковым креплением, на нее укладывают квадратик, а рядом – ровную квадратную пластинку. Следом задействуют фрагмент с 6 выступами: по одному краю крепят гладкую длинную пластину, а под выступом снизу – прозрачный квадратик. В верхней части ставят модуль с отверстием в середине. Рядом – такой же, только с выступающим краем. На нем размещают квадратик. На получившуюся конструкцию снаружи устанавливают два плоских круга. На них надевают шины. С внутренней стороны помещают деталь с боковым креплением. В результате должны получиться два вот таких элемента.
![]()
![]()
![]()
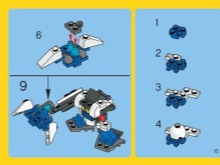
Затем берут одну из частей с колесами и крепят к ней еще несколько фрагментов: сначала кубик с 3 выступами, а затем – двойной. На другую — присоединяют тем же способом, но так как целых кубиков не было, их собирают из нескольких пластинок.
Из 5 набора делают кабину тягача. Для нее собирают 2 секции. На панельку с 6 выступами снизу надо положить прямоугольный фрагмент. На него устанавливают такой же, но с боковым стержнем. Сверху прикрепляют еще один прямоугольный модуль. Сбоку — два одинаковых кубика с отверстиями. Наверху размещают прямоугольник, а рядом – кубик с движущимся элементом. На прямоугольный фрагмент ставят ровный квадрат и треугольник. Сбоку крепят два квадратика (один на другой). На движущийся модуль помещают еще плоский квадрат. Рядом размещается гладкая пластинка. На свободный участок помещают 3 шайбы, последняя – гладкая. Затем собирают колесо и закрепляют с одной из сторон. Таких половинок должно быть две.
Из 6 комплекта делают низ для кабины. На деталь с 6 выступами ставят пластинку. Рядом — еще две, в середине размещают деталь с отверстием. Снизу поместить панель с прорезью наверху. Поверху крепится планка со стержнем, а на нее устанавливают два квадрата со скобками. К ним присоединяют 2 уголка. На каждый из уголков крепят квадратный элемент. На свободные места устанавливают по фрагменту со скобкой. Вниз помещают квадратики. На выступающие части ставят еще две, их закрывают плоскими панельками. Изнутри укладывают прямоугольную пластину. Выступающие столбики поворачивают на 90 градусов.
![]()
![]()
![]()
Из 7 набора делают стенку кабины. Для этого берут панель с 8 бугорками и на нее крепят раздвижную деталь из 2 пластин. С другой стороны точно так же крепится еще одна. На раздвижные «ушки» уложить по кубику. На выступающие «ушки» поместить квадратную скобку. И точно такую же – с другой стороны. «Ушки» отгибают вниз, а в середину надо поместить модуль с подвижной панелькой вверху. На подвижную пластину кладут прямоугольник с одним отверстием. Затем ставят квадратный фрагмент. Рядом с ним промежуток закрывают ровной пластинкой. По бокам размещают еще детали, каждую скрывают под плоским квадратом. В середину помещают прозрачные кубики, подвижную панель отодвигают. На прозрачные кубики закрепляют два прямоугольных уголка. Сверху их закрывают гладкими элементами. Теперь стенка кабины готова.
Приступаем к сборке робота из разных конструкций. Берем стенку и крепим книзу кабины. На скобки надеваем левую и правую части кабины. На кабине спереди устанавливаем бампер. По краям размещаем трубы. По бокам в специальные рожки вставляем секцию с колесами. Теперь их можно отогнуть вдоль корпуса тягача. В получившуюся выемку помещают голову Оптимуса Прайма. Так выглядит лидер автоботов в виде автомобиля, а так – в облике трансформера.
![]()
![]()
![]()
О том, как сделать это поэтапно, смотрите в следующем видео.
Другие идеи
Для игры с детьми часто не требуются огромные и сложные игрушки, тем более малышам очень нравятся маленькие фигурки. Их легко собрать из мелкого LEGO. Для изготовления этого персонажа потребуется следующий комплект.
![]()
![]()
Опишем последовательно все выполняемые действия.
- Надо сделать вот такую конструкцию. На квадратный элемент крепится еще один такой же, но со скобкой, а поверх – прямоугольная пластинка. Сверху ставятся плоский квадрат и шайба. Таких надо 2 шт.
- Затем делаем № 2. Для этого берут квадратный фрагмент с боковой скобой и поверх накладывают планку с двумя бугорками. На них одевают две одинаковые шайбы. Сборка готова, но понадобится еще одна такая же.
- Следующий № 3 состоит из прямоугольника с 2 выступами и стержнем для крепления, обычной прямоугольной детали и такой же по формату, но в виде треугольника.
- Конструкция № 4: на модуль со стержнем для крепления надевают скобку, а поверх – панель с одним отверстием в середине.
![]()
![]()
![]()
- Надо сделать вот такой фрагмент. Для этого потребуются квадратик с держателем и треугольник.
- Берем пластинку с креплением, поверх накладываем 2 плоских детали. В нижнюю часть ставим еще одну прямоугольную пластину.
- Приступаем к сборке. Берутся конструкции № 3 и № 4, их соединяют при помощи специальных креплений. Затем объект № 1 устанавливают сбоку: сначала – слева, а затем – с правой стороны. Берут часть № 2 и крепят сбоку на выступающий стержень, с двух сторон. Конструкцию № 6 прикрепляют сверху на прямоугольник. Элемент из № 5 надевают на стержень изнутри и убирают в нишу. Вот такая модель должна получиться. Ее легко трансформировать в робота. Для этого две ровные боковые панели передних колес разворачивают наружу. Затем отгибают в противоположные стороны, затем то же проделывают с кабиной. Пластины разворачивают под углом 90 градусов. Плоскую часть кузова разворачивают под углом 360 градусов. Голову и руки опускают. Трансформер готов.
Такого самодельного автобота сделать довольно быстро, это не отнимет много времени, зато остальное можно потратить на игру ребенком.
Мы обожаем LEGO и Crazy Circuits [LEGO-совместимая электроника / прим. перев.], поэтому решили скомбинировать их в простого и интересного робота, умеющего обходить препятствия. Мы покажем, как собрать такого робота и подробно опишем этот процесс. Ваша версия робота может не полностью совпадать с нашей.

Приводим список необходимой электроники и деталек LEGO. Не бойтесь экспериментировать с ними.


Комплектующие
Электроника
- 1 x плата Robotics Board от Crazy Circuits
- 2 x совместимый с LEGO сервомотор полного вращения
- 1 x ультразвуковой датчик расстояния HC-SR04
- 4 x джампер-кабеля «мама-мама»
- 1 x внешний источник питания с USB
Мы использовали различные детальки, а вам рекомендуем сделать так, как вы считаете нужным, и из того, что есть у вас на руках. Важно, чтобы у вас был способ приделать сервомоторы снизу, ультразвуковой датчик – так, чтобы он смотрел вперёд, и каким-то образом закрепить плату и источник питания. Для этого можно использовать двусторонний скотч, резинки, липучку. Приводим ссылки на наши детальки в магазине BrickOwl, однако вы можете купить их где угодно, где продаётся LEGO и совместимые наборы.
- 2 x LEGO Wedge Belt Wheel (4185 / 49750)
- 1 x LEGO EV3 Technic Ball Pivots Set 5003245
- 1 x LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- 1 x LEGO Technic Brick 1 x 6 with Holes (3894)
- 2 x LEGO Axle 4 with End Stop (87083)
- 4 x LEGO Half Bushing (32123 / 42136)
- 4 x LEGO Brick 2 x 2 Round (3941 / 6143)
- 1 x LEGO Plate 6 x 12 (3028)
Шаг 1: строим шасси из LEGO

Мы начали с пластинки LEGO 6×12, это был минимальный размер, который нас устроил. Можно использовать более крупную, однако мельче уже будет сложнее.
Ширина робота определялась имеющимся у нас в наличии внешним источником питания, поскольку нам была нужна возможность вставлять его на место. Для аккумулятора большего размера потребуется робот большего размера.
Шасси должно быть достаточно высоким, чтобы на нём разместилась и батарея, и плата сверху.
Шаг 2: добавляем колёса







Каждый сервомотор нужно разместить снизу шасси. В итоге нам понадобились следующие комплектующие:
- Ось 4 LEGO со стопором (87083)
- Втулка LEGO (32123 / 42136)
- Круглый кирпичик LEGO 2 x 2 (3941 / 6143)
Как и с другими модельками LEGO, вариантов тут масса! У нас получилось с теми комплектующими, что мы перечислили, а вы можете попробовать что-нибудь другое.
Шаг 3: добавляем ролик




Наш ролик позволяет роботу кататься по плоскости на двух моторизованных колёсах, играя роль третьего колеса – так роботу легче поворачивать и двигаться.
Для его закрепления потребовались следующие детали:
- LEGO EV3 Technic Ball Pivots Set 5003245
- LEGO Technic Cross Block Beam 3 with Four Pins (48989 / 65489)
- LEGO Technic Brick 1 x 6 with Holes (3894)
Шаг 4: добавляем датчик расстояния



Ультразвуковой датчик расстояния нужно закрепить на передней части робота, чтобы он «видел», куда едет, и понимал, когда нужно остановиться, чтобы не столкнуться с препятствием.
Если 3D-принтера у вас нет, придумайте, как удержать датчик при помощи деталек LEGO, клейкой ленты, резинок, хомутов и т.п. Важно, чтобы он смотрел прямо – туда, куда едет робот, когда движется вперёд.
Шаг 5: добавляем плату




Плата – мозг всей операции. Она размещается наверху кубиков LEGO, поэтому её крепить легко.
Обычно плата Robotics Board используется совместно с проводящей плёнкой, позволяющей мастерить электрические цепи прямо поверх LEGO, но поскольку у нас тут всего лишь два мотора и датчик расстояния, их можно подключить напрямую к штырькам на плате.
Плату размещаем так, чтобы USB-кабель питания было легко воткнуть. Нам повезло найти в коробке с кабелями очень короткий USB-кабель.
Теперь можно подключать датчик и моторы!
По датчику: разъём echo нужно подключить к контакту 3 на плате, разъём trigger – к контакту 5, VCC – к 5 В, Gnd – к GND. Таким образом датчик будет получать питание и общаться с платой.
Затем нужно подключить каждый из моторов. Это сделать легко – коричневые провода на GND, красные – на 5 В, оранжевые – к контакту D6 для левого мотора и D9 для правого.
Шаг 6: программируем Robotics Board

Перед тем, как робот сможет работать, нужно загрузить код в микроконтроллер. Перед этим убедитесь, что у вас на компьютере установлена последняя версия Arduino IDE.
Свой код мы выложили в репозиторий на GitHub:
Код простой, в нём много комментариев, чтобы было понятно, что за что отвечает.
Вам также потребуется библиотека NewPing
Шаг 7: пускаем робота погулять



Построив робота и загрузив в него код, можно переходить к испытаниям!
Проще всего подключить внешний источник питания и дать роботу возможность ехать вперёд. Если выставить перед ним руку, он должен отодвинуться назад, повернуться и снова поехать вперёд (смотрите, чтобы он не съехал со стола!)
Мы построили простую шестиугольную «арену» из картона, чтобы роботу было где поездить. Не бойтесь экспериментировать с тем, что есть у вас.
Шаг 8: дальнейшее развитие


Если вам интересно развивать этот проект, вот вам вопросы:
— что вы узнали, собирая робота?
— что повлияло на ваш выбор деталей?
— поедет ли робот быстрее, если увеличить ему колёса?
В коде есть две переменных, исправив которые, вы измените время отката робота назад при обнаружении препятствия, и время, которое он будет поворачиваться. Попробуйте поменять goBackwardTime и turnRightTime и посмотреть, как это повлияет на поведение робота.
Читайте также: