
Робот из металлического конструктора своими руками
Обновлено: 29.04.2024
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать. Правда, с немецкой педантичностью создатели отложили винтиков ровно столько сколько нужно, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина: 228 мм
Высота: 380 мм
Ширина: 160 мм
Вес в сборке: 658 гр.
Питание: 4 батарейки типа D
Вес поднимаемых предметов: до 100 гр
Подсветка: 1 светодиод
Тип управления: проводной дистанционный пульт
Примерное время сборки: 6 часов
Движение: 5 коллекторных моторов
Защита конструкции при движении: храповик
Подвижность:
Механизм захвата: 0-1,77''
Движение запястья: в пределах 120 градусов
Движение локтя: в пределах 300 градусов
Движение плеча: в пределах 180 градусов
Вращение на платформе: в пределах 270 градусов
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Процесс сборки
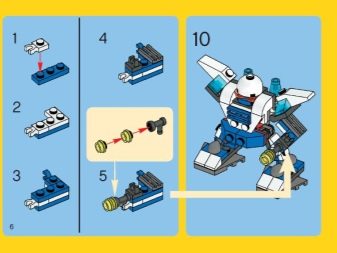
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
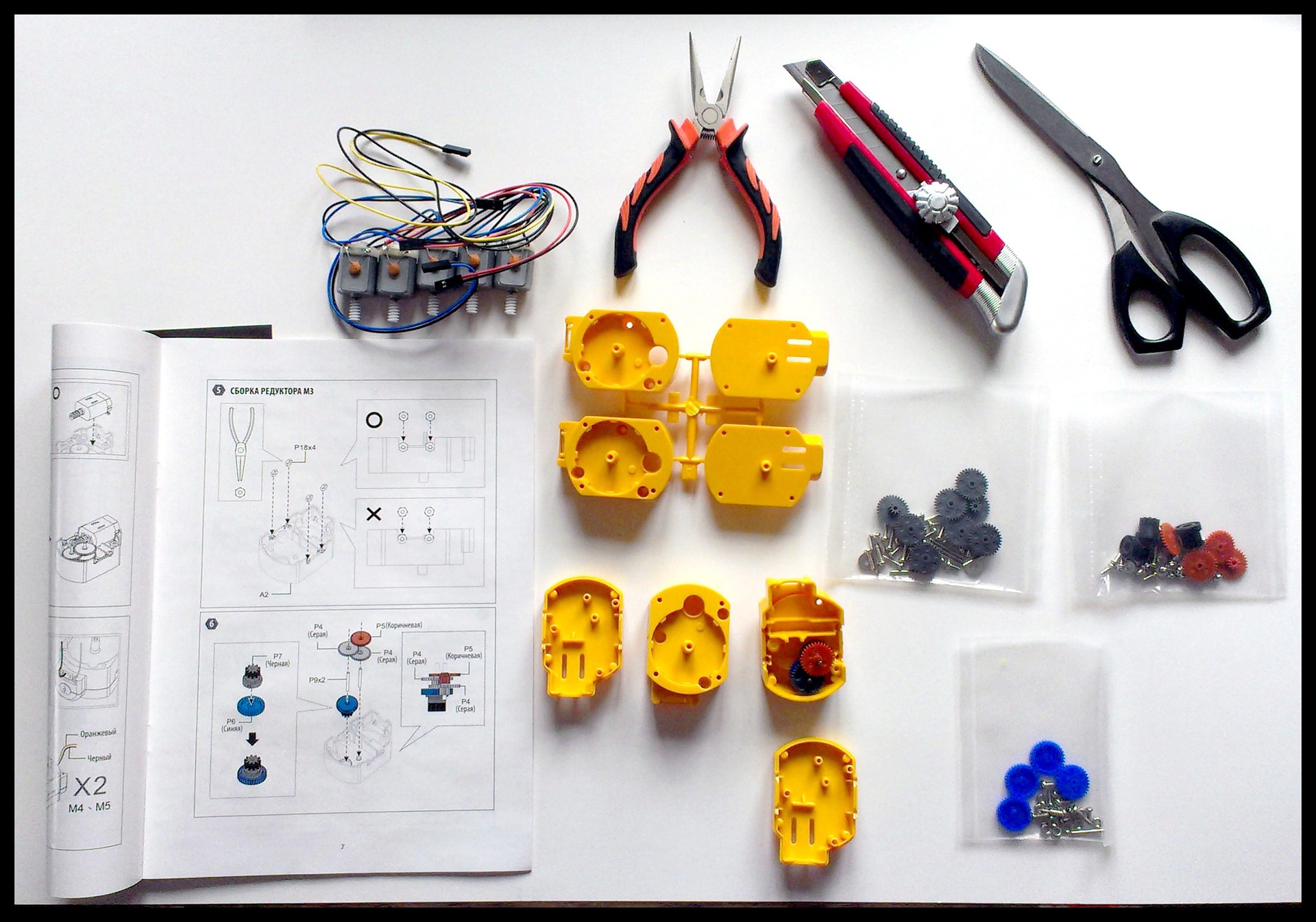
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! :)
Важно: в 3 из 5 корпусов моторчиков нужно утопить гайки по бокам — на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.

Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше: три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
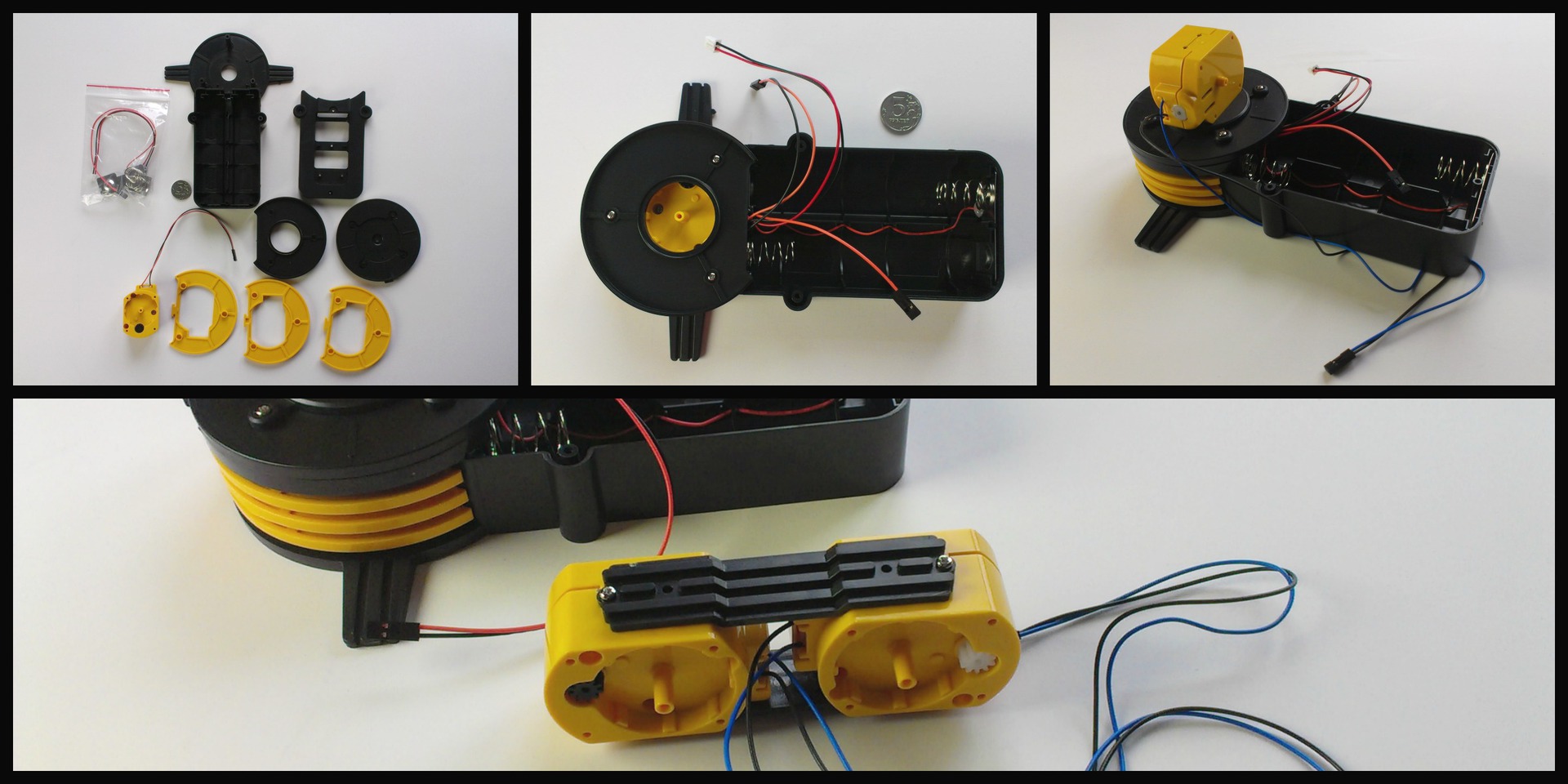
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
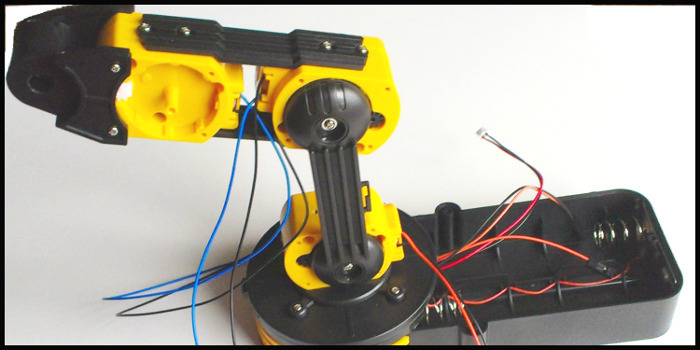
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!

Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
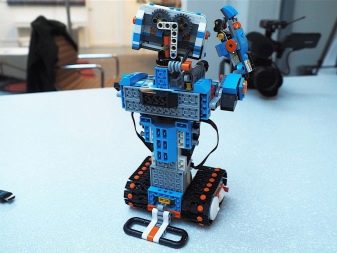
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно. Вот как это выглядело:
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим робо-мастером!

Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет: первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Итоги
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо, Даджет!
Кто занимается робототехникой, конечно, хочет сделать робота своими руками. Но далеко не у всех, особенно у начинающих, хватает знаний для создания робота самостоятельно. И сразу возникает вопрос: как сделать робота, если очень хочется?
Для создания робота, помимо идеи, понадобятся различные по сложности радиокомпоненты. Также не обойтись без шасси для будущего робота и различных механических частей. Конечно, всё будет зависеть от размаха вашего проекта. Но без механики вряд ли вам обойтись.
Возможно, кто-то предпочитает использовать готовый конструктор для создания различных роботов. К примеру, «Lego». В данном конструкторе имеется всё необходимое для создания роботов различной сложности, но такой конструктор не из дешёвых. Да и согласитесь, куда приятнее созерцать свое творение, если оно было изготовлено самостоятельно от «А» до «Я», от набросков на листе бумаги до полного его воплощения в задуманных масштабах.
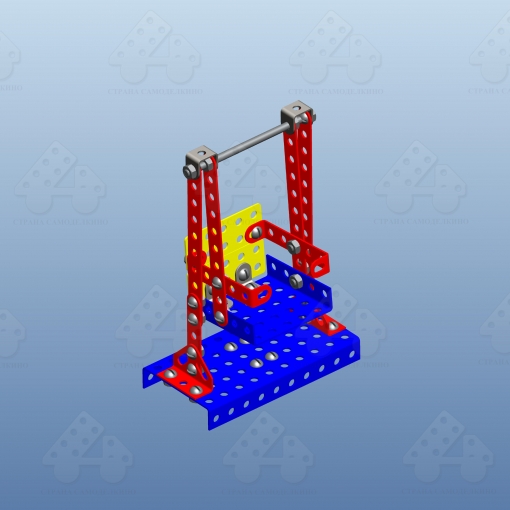
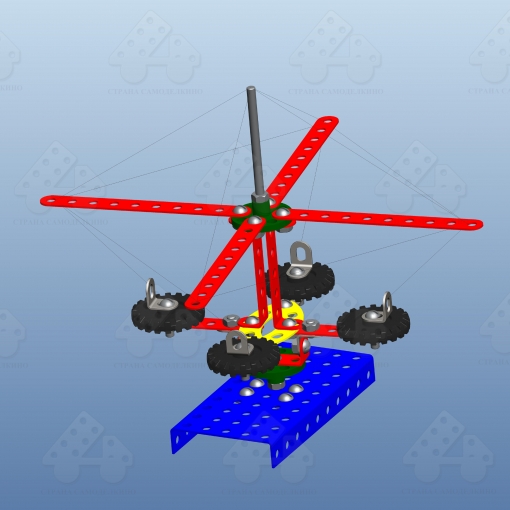
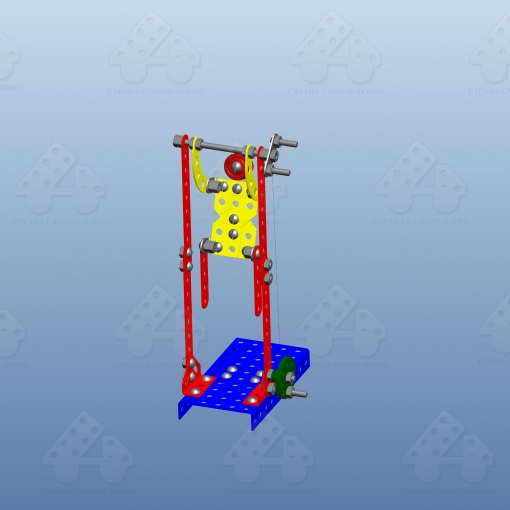
Для таких творческих людей, не боящихся поработать своими руками совместно со своим ребенком сделать робота, а также для детских радиокружков была разработана модель «Турель». Конечно, это не робот, но на основе моего проекта можно создать различные увлекательные роботизированные устройства. Тем более, что всё выполнено из бюджетных материалов.
Сборка поворотного шасси

Поворотное шасси для турели выполняется из двухстороннего фольгированного текстолита, как и большинство комплектующих для данной самоделки. Данный материал очень лёгкий и простой в обработке и имеет достаточную прочность. При помощи ножниц по металлу можно вырезать любую подходящую деталь.
Круговое вращение орудия в данном проекте не требуется, так как нужен небольшой сектор обстрела. Соответственно, для данной задачи подошёл бюджетный сервопривод SG90.
Шасси должно удерживать на месте турель при выстреле и не дать ей перевернуться, так как при испытании данной модели отдача орудия от выстрела оказалась достаточно большой.
Для поворотного шасси я применил самодельный упорный подшипник. Таким образом, шасси получилось поворотным, и благодаря весу металлических шариков являлось достаточно устойчивым, хотя при выстреле турель всё-таки слегка перемещается. Пришлось даже уменьшить немного силу выстрела.
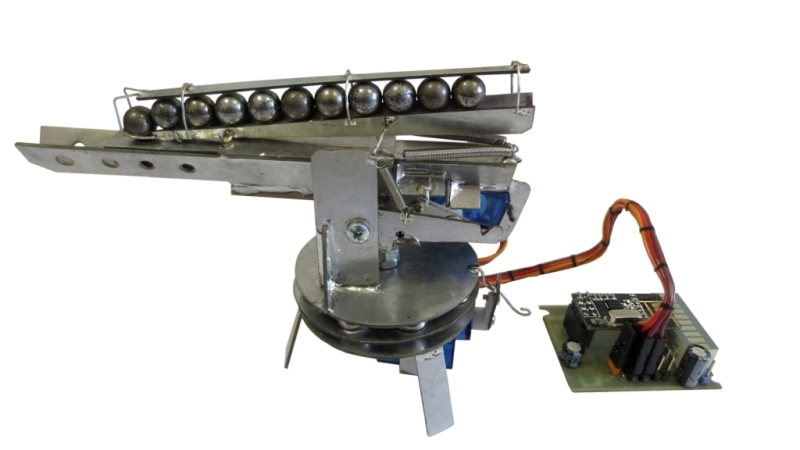
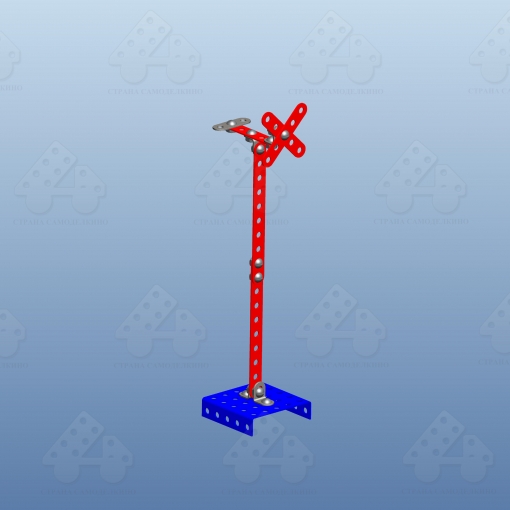
Сборка орудия или пушки
С пушкой для турели пришлось повозиться. Из многочисленных опробованных конструктивных вариантов я выбрал данный вариант (рис. 1). В таком исполнении в ствол легко можно было загрузить металлические шарики диаметром 8 мм, так как конструкция пушки была весьма крепкой. Чтобы шарик не катался по стволу и его положение было четко зафиксированным, в стволе были сделаны сквозные отверстия.
Установка орудия на поворотное шасси и механизм взвода и спуска орудия
Установив на поворотном шасси орудие, я начал процесс сборки взводящего механизма. Осуществить данную цель мне помог сервопривод SG90. Усилия сервопривода достаточно, чтобы натянуть пружины. Как только ударная часть оказывалась в позиции, срабатывала защёлка, которая и удерживала ствол во взведённом состоянии. В таком положении взводящий рычаг сервопривода, размещённый в нижней части ствола, просто мешал осуществить выстрел.
Для реализации выстрела я применил простой и надежный способ. Как только защёлка зафиксировала ствол (рис. 1), сервопривод должен возвращаться в исходное состояние. В определённый момент своего пути сервопривод нажимал на спусковой механизм и одновременно сбрасывал защёлку, удерживающую ударную часть. При этом производился выстрел.
Магазин рассчитан на 12 металлических шариков, взятых из подшипника, хотя можно запросто стрелять крупными бусинками. Чтобы упростить подачу шариков в ствол, я расположил магазин под небольшим углом. Загрузка ствола шариками осуществлялась под собственным весом, они просто скатывались туда, куда нужно.Начальное положение ударника перекрывает подачу металлических шариков (рис. 1). Как только ударник уходит, верхний шарик падает.
Но возникла проблема: при падении металлический шар начинал катиться. Чтобы ее решить, я сделал боковые отверстия в стволе. Они удерживают положение шарика, не давая ему перемещаться (рис. 2).
Применяемая электроника
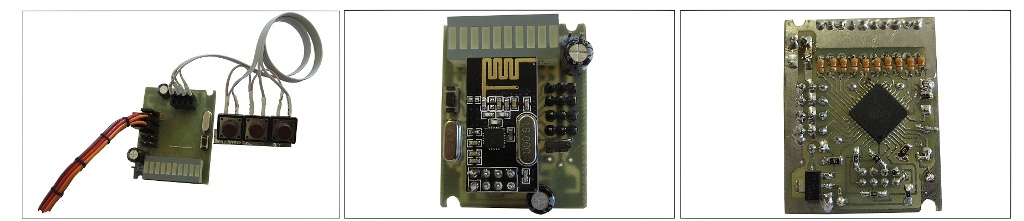
Для радиоуправления роботизированной турели я применил плату, разработанную ранее для проекта "Осадная катапульта"
Учитывая, что вряд ли кто-то будет повторять радиоджойстик, изготовленный мною, так как он достаточно сложен, представляю вариант значительно более простой в исполнении, хотя разводку на печатной плате оставил под радиомодуль.
Как вы видите из принципиальной схемы, джойстик достаточно простой и состоит из трех тактовых кнопок, подключенных к микроконтроллеру. Две тактовые кнопки осуществляют поворот турели вправо либо влево. Оставшаяся тактовая кнопка даёт команду на выстрел. Те, кто имеют определенные знания в программировании микроконтроллеров, могут написать свою версию программы для микроконтроллера.
К примеру, оснастив устройство датчиком расстояния, можно реализовать автоматический огонь, как только будет обнаружен объект на заданном расстоянии. Поскольку данную самоделку я разрабатывал как базовую модель для детского радиокружка, то соответственно комплектация и сложность изделия также могут меняться.

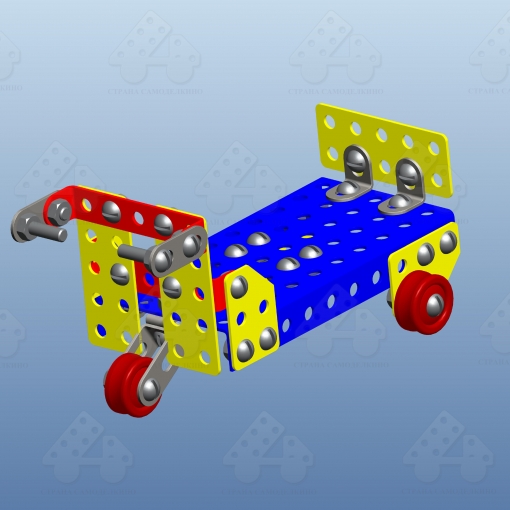
Модель робота ВАЛЛ-И можно собрать из конструктора серии "Самоделкин-80". Перед началом сборки выкладываем детали из набора согласно таблице. Данная подготовка облегчает сборку модели. Этот подход рекомендован при сборке любых моделей из металлического конструктора.
Детали подготовлены, приступаем к сборке. Хоть модель и небольшая, но может вызвать затруднения при небольшом опыте знакомства с металлическим конструктором. Поэтому рассмотрим сборку подробнее. При сборке применен поузловой метод сборки.
Начинаем сборку с головы и ног-гусениц. Длинные винты при сборке гусениц - М4x20.


Сборку тела робота разделим на две части:
И так, собираем первую часть

Собираем вторую часть

К первой части тела присоединяем голову и ноги-гусеницы

К получившейся первой части тела присоединяем вторую часть тела с помощью длинных винтов M4x16. Данная длина винтов взята для удобства монтажа, при должной сноровке можно использовать винты М4x6.
АЛЬБОМ МОДЕЛЕЙ ИЗ МЕТАЛЛИЧЕСКОГО КОНСТРУКТОРА













































































© 2000-2021 Страна Самоделкино ТМ. Любое использование материалов допускается с указанием активной ссылки на источник.

Конструктивно робот – не просто механический человек-гуманоид, запрограммированный на конкретные функции, например, устойчиво передвигаться, совершать примитивные движения и переносить грузы. Идея робота опирается на вооружённого киборга.



Как сделать робота из большого конструктора?
Для изготовления макета настоящего робота из большого конструкторского набора могут потребоваться следующие детали и функциональные узлы, делающие сложный механизм ценным с точки зрения подвижной и управляемой конструкции, а не просто неподвижной статуей, поставленной в детской или мастерской как элемент технико-дизайнерской роскоши.
В качестве примера – крупногабаритные детали конструктора марки «Полесье», похожего на легендарный LEGO. Отличие первых наборов LEGO от «Полесья» в сравнительной компактности первого: «кирпичи» и другие элементы набора схожи по строению с «Полесьем». Но в «Полесье», в отличие от LEGO, присутствуют внутренние перегородки, разделяющие пространство на отсеки, соответствующие площади размещения конкретного шипа. Эти перегородки позволяют укладывать ряды блоков вполовину по посадочному месту, а не целиком, что позволяет сооружать диагональные «лестничные» переходы, не применяя специальные косые, сглаженные и сгруглённые комплектующие. Те, в свою очередь, содержатся далеко не в каждом из конкретных конструкторских наборов. В данном руководстве используется комплект из не менее чем 200 деталей. Выполните следующие шаги.
Соберите две подошвы (ступни) робота. Потребуется два квадратных яруса блоков, поставленные один на другой.
Надстройте над ними голени и бёдра, используя несколько вышележащих рядов блоков. Ноги почти готовы, для наглядности – например, когда показываете процесс сборки детям – предпочтительно использовать разноцветные и высококонтрастные друг по отношению к другу детали.
Соберите нижнюю часть туловища, расположив ряды блоков друг над другом. Длина и ширина этой части по площади равна площади ног конструкции, расположенной на ширине плеч.
Продолжите надстраивать туловище, меняя цвета. Например, нижняя часть туловища – из голубых, средняя – из красных и жёлтых, верхняя – из розовых и также жёлтых элементов. Оставьте посадочное место для рук робота – в один ряд шипов. Туловище собрано.
Приступите к плечам, параллельно наращивая руки из таких же блоков. Руки обычно направлены вперёд, а не свисают по бокам – если это боевой робот, а не производственная его модель.
Соорудив туловище и шею, закончите сборку рук. Поскольку руки не имеют опоры снизу, то они могут отваливаться. Если бы это был одноразовый конструктор, то можно было бы посадить все соединения на эпоксидный клей, зашкурив все стыки наждачной бумагой для наиболее устойчивого сцепления.
Соберите до конца шею и голову. Для головы используется в основном квадратный массив, состоящий из соединённых в обычную «стенку» блоков. По сути, полученный робот толщиной не более стенки дома, если не считать выступы стоп, рук и конструкции, напоминающей автомат.
Присоедините к рукам сборки, обозначающие, к примеру, автомат и пистолет. На голову конструкции присоедините «пирамидку», обозначающую головной убор. Например, красная верхушка служит отсылкой к краповому берету.
Читайте также: