
Робот манипулятор лего ev3
Обновлено: 26.07.2024
Конспект урока по робототехнике в 7 классе.
Общее время занятия 2 академических часа.
Тема урока: Введение в робототехнику. Знакомство с конструктором Lego Mindstorms EV3.
Цель: Познакомить учащихся с конструктором LEGO Mindstorms, с предметом Робототехника, ввести понятие "робот", "андроид", "манипулятор".
- формирование умений работы конструктором;
- развитие исследовательских навыков учащихся;
- умения анализировать полученные результаты.
- развитие познавательной активности;
- развитие внимания и памяти учащихся.
- воспитание интереса к программированию.
Тип занятия: Комбинированное занятие.
Методы обучения: объяснительно-иллюстративный, частично-поисковый. Закрепление в
памяти учащихся знаний и умений, необходимых для дальнейшего обучения, проходит в форме практической работы.
Формы контроля: наблюдение в ходе обучения с фиксацией результата.
Оборудование занятия: Проектор, Lego -конструкторы 45544.
План занятия
Сконцентрировать внимание учащихся на учебной деятельности, повторить ранее пройденный материал.
Приветствие участников занятия, постановка цели занятия, подготовка рабочих мест.
Настроить класс на рабочий ритм.
Мобилизовать учащихся для включения в учебный процесс.
Педагог сообщает учащимся новую информацию, рассказ сопровождается показом изображений на интерактивной доске.
Учащиеся слушают, задают вопросы, записывают в тетрадь необходимую информацию.
Выполнение учащимися практической работы с использованием конструктора Lego Mindstorms.
Педагог рекомендует учащимся применить новый полученный материал в практической работе.
Учащиеся выполняют задания под руководством педагога.
Подведение итогов занятия
Оценка занятия, выявление плюсов и минусов.
Учащиеся оценивают свою работу, говорят, что получилось, и что нет, убирают рабочие места.
1. Организационный момент.
Тема нашего первого урока — «Введение в робототехнику. Знакомство с конструктором Lego Mindstorms EV3.». Сегодня на уроке мы п ознакомимся с предметом Робототехника, с конструктором LEGO Mindstorms, узнаем, что такое "робот".
2. Изучение нового материала
Робототехника - (от робот и техника; англ. robotics) прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робот - (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма. Как вы думаете, для чего создан робот? (Для помощи людям.)
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животным).
При этом робот может как и иметь связь с человеком (то есть получать от него команды), так и действовать автономно (самостоятельно).
Обычный робот создается лишь с некоторыми качествами от человека, нужными для выполнения определенных работ. Но есть такие роботы, созданные по абслютному подобию живого организма. Такие роботы называются Андроиды.
1. Манипуляционные роботы - автоматическая машина, состоящая из исполнительного устройства в виде манипулятора и устройства программного управления, которое служит для выполнения в производственном процессе двигательных и управляющих функций.
Такие роботы делятся на передвижные( передвигаются только по заранее заложенной траектории) и стационарные (не передвигаются вообще).
Манипулятор — это механизм для управления пространственным положением предметов. Для этого у таких роботов существует два вида движения: Поступательное движение и угловое перемещение.
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства похожи на руку человека — захват осуществляется с помощью механических «пальцев». Как вы думаете, где можно использовать таких роботов? (На производстве: фабриках, цехах и т.д.)
2. Мобильные роботы в свою очередь делятся на колесные, шагающие, гусеничные, ползающие, плавающие и летающие.
В этом году мы будем работать с мобильными роботами, но в следующем познакомимся и с манипуляторами.
Итак, что такое робот мы узнали, теперь познакомимся с конструктором. Наш конструктор называется Lego Minstorms EV3, в его состав входит более 300 деталей.
Все эти детали можно разделить на 5 групп:
1. Моторы (приводят робота в движение)
2. Датчики (средство для получения роботом информации из внешнего мира)
3. Кабели (для подключения моторов и датчиков к микрокомпьютеру)
4. Детали (для сборки робота)
5. Микрокомпьютер (цент всего набора)
Разберемся по порядку с каждой группой.
1. Моторы. В состав конструктора входят два больших мотора и один средний.
Большой мотор — это мощный «умный» мотор. У него есть встроенный датчик вращения, который измеряет обороты мотора (в градусах или оборотах).Эта особенность позволяет делать движения робота очень точными.
Средний мотор также имеет встроенный датчик вращения (с разрешением 1 градус), но он меньше и легче, чем большой мотор. Это означает, что он способен реагировать быстрее, чем большой мотор.
2. Датчики. В состав конструктора входят три вида датчиков: датчик цвета, датчик расстояния и датчик касания и гироскопический датчик (о немпоговорим чуть позже).
Датчик касания - это аналоговый датчик, который может определять, когда красная кнопка датчика нажата, а когда отпущена. Имеет три варианта работы: нажатие, отпускание и щелчок.
Датчик цвета - это цифровой датчик, который может определять цвет или яркость света, поступающего в небольшое окошко на лицевой стороне датчика.
«Цвет»
В режиме «Цвет» датчик цвета распознает: черный, синий, зеленый, желтый, красный, белый, коричневый цвета. Также датчик может обнаружить отсутствие цвета (когда определить цвет невозможно).
«Яркость отраженного света»
В режиме «Яркость отраженного света» датчик цвета определяет яркость света, отраженного от лампы, излучающей красный свет.
«Яркость внешнего освещения»
В режиме «Яркость внешнего освещения» датчик цвета определяет силу света, входящего в окошко из окружающей среды (солнечного света или луча фонарика).
Датчик расстояния
С помощью ультразвукового датчика робот сможет обнаруживать препятствия и определять их удаленность в дюймах или сантиметрах.
5. Микрокомпьютер
Кнопки управления модулем:
2. Центральная - подтверждение различных запросов — завершить работу, выбрать необходимые настройки или блоки в программе модуля.
3. Влево, Вправо, Вверх, Вниз - перемещение по содержанию модуля EV3.
4. Практическая работа
Теперь я предлагаю вам разделиться на группы по четыре человека. У каждой группы есть по одному набору Lego Mindstorms EV3. До завершения урока осталось всего 20 минут, это время я предлагаю вам посвятить созданию своей первой модели робота. Работая в команде, пофантазируйте и создайте одну модель на свободную тему, а в конце урока обсдим, что у вас получилось.
5. Заключение. Рефлексия
Наш урок подходит к концу. Давайте проанализируем, что мы с вами сегодня успели сделать (ответы учеников)
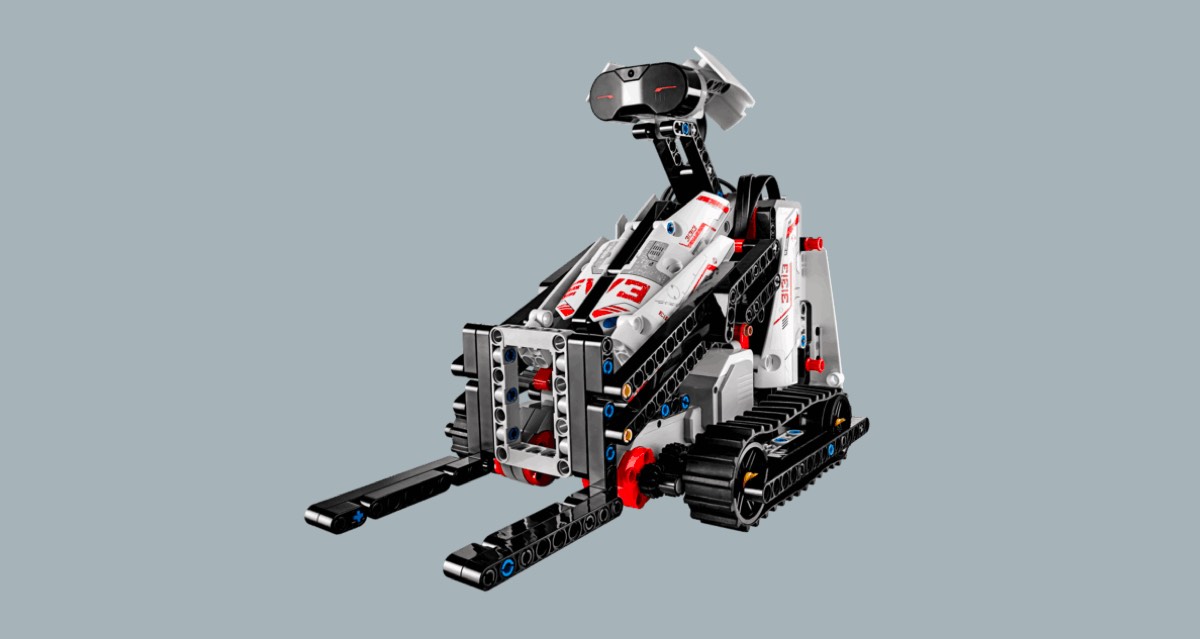
Эти роботы дадут тебе возможность в полной мере познакомиться с серией EV3. В комплекте идут инструкция по сборке, задания для программирования и инструмент программирования, собранные в новом приложении для программирования EV3. Новичкам в создании роботов рекомендуется начинать с этой модели.
Если ты еще никогда не собирал роботов LEGO MINDSTORMS, мы рекомендуем начать с этого! TRACK3R представляет собой робота высокой проходимости на гусеничном ходу с четырьмя взаимозаменяемыми инструментами. Начни с создания корпуса робота, а затем познакомься с возможностями, которые дают 4 разных инструмента TRACK3R: измельчитель с двойным лезвием, разрушительная базука, захватная клешня и молот.
Управляй роботом TRACK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Это шестилапое создание не только выглядит как скорпион, но и ведет себя соответственно. Он может резко развернуться, схватить предмет своей клешней-дробилкой, а хвост-молния готов дать отпор всему, что окажется на его пути.
Управляй роботом SPIK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Один из самых популярных роботов R3PTAR (высота — 35 см) может скользить по полу как настоящая кобра и с нереальной скоростью атаковать предметы своими красными клыками.
Управляй роботом R3PTAR с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Робот GRIPP3R создан для поднятия тяжестей У него достаточно сил, чтобы своими мощными захватами поднять и кинуть жестяную банку.
Управляй роботом GRIPP3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

EV3RSTORM — самый усовершенствованный робот LEGO® MINDSTORMS®. Высокий уровень интеллекта и боевая мощь в сочетании с разрушительной базукой и вращающимся тройным лезвием делают робота EV3RSTORM непобедимым.
Загрузи бесплатное приложение Robot commander LEGO® MINDSTORMS® и управляй роботом EV3RSTORM с планшета или смартфона.

Роботы, созданные фанатами
Эти роботы были созданы самыми преданными поклонниками; они могут стать источником нового необыкновенного опыта в сборке и программировании. Мы рекомендуем приступать к сборке этих моделей после того, как тебе удалось собрать 2–3 робота из основной серии.
Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
Роботом-погрузчиком Bobcat® с дистанционным управлением можно управлять при помощи кнопок ИК-маяка, заставляя его двигаться или поднимать предметы.
Разработчик Ральф Хемпел (Ralph Hempel)
Это робот, который умеет рисовать? Точно! Используя обычный маркер, этот принтер рисует линии на бумаге для кассовых аппаратов. Воспользуйся существующей программой,чтобы написать LEGO EV3, или создай свою собственную, чтобы нарисовать всё, что захочется!

Разработчик Лоренс Валк (Laurens Valk).
Хочешь грузовик с дистанционным управлением? Понятно! Крутой автомобиль для увлекательной игры. RAC3 легко модифицируется для движения с большей скоростью за счет дополнительных приводов; кроме того, к нему можно добавить специально собранный прицеп и использовать грузовик как средство для транспортировки.

Разработчик Лассе Стенбэк Лауесен (Lasse Stenbæk Lauesen).
Очаровательный робот-трицератопс может передвигаться и поворачиваться на четырёх ногах.

Разработчик Марк-Андре Базергуи (Marc-Andre Bazergui)
Этот робот — забавный сумасбродный компаньон, реагирующий на ИК-маяк своего друга-жучка. Вы можете управлять роботом KRAZ3 с помощью настраиваемой программы, ИК-маяка или запрограммировать его так, чтобы он двигался по комнате за своим другом-жучком. Разработчик Марк-Андре Базерги (Marc-Andre Bazergui)

Разработчик Вассилис Чриссантакопулос (Vassilis Chryssanthakopoulos)
Робот, созданный по мотивам R2D2 из «Звездных войн», может общаться, следовать за владельцем или перемещаться по комнате туда, куда ему укажут, — через ИК-маяк. Он поддерживает большой набор сценариев, которые легко запрограммировать или расширить, используя новое программное обеспечение EV3.

Разработчик Даниэле Бенедеттелли (Daniele Benedettelli)
Готов сыграть рок-н-ролл? На гитаре LEGO можно играть почти как на настоящем инструменте. Ударяй по одной струне, перебирай пальцами по безладовому грифу и создавай звуки, используя тремоло-систему, чтобы сыграть самые невероятные гитарные соло!

Разработчик Мартин Боогаартс (Martyn Boogaarts)
Дружелюбный робот-помощник, у которого лучше всего получается перемещаться по линиям разного цвета при помощи датчика освещенности, который позволяет ему обнаруживать препятствия на своем пути и реагировать на них. Робот может перемещаться самостоятельно или управляться с помощью ИК-маяка.

Разработчик Рикардо Оливейра (Ricardo Oliveira)
Этот робот хочет поиграть с тобой. Положи красный мяч под стаканчик, используй ИК-маяк, чтобы задать свой уровень, и посмотри, как робот меняет стаканчики. Теперь тебе нужно угадать, где же спрятан мяч? Предложи друзьям посоревноваться, кто быстрее всех найдет красный мяч!

Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
Этот робот поможет рассортировать все имеющиеся у тебя балки LEGO®Technic. Просто вставь балку в механизм, а MR-B3AM определит её цвет и размер.

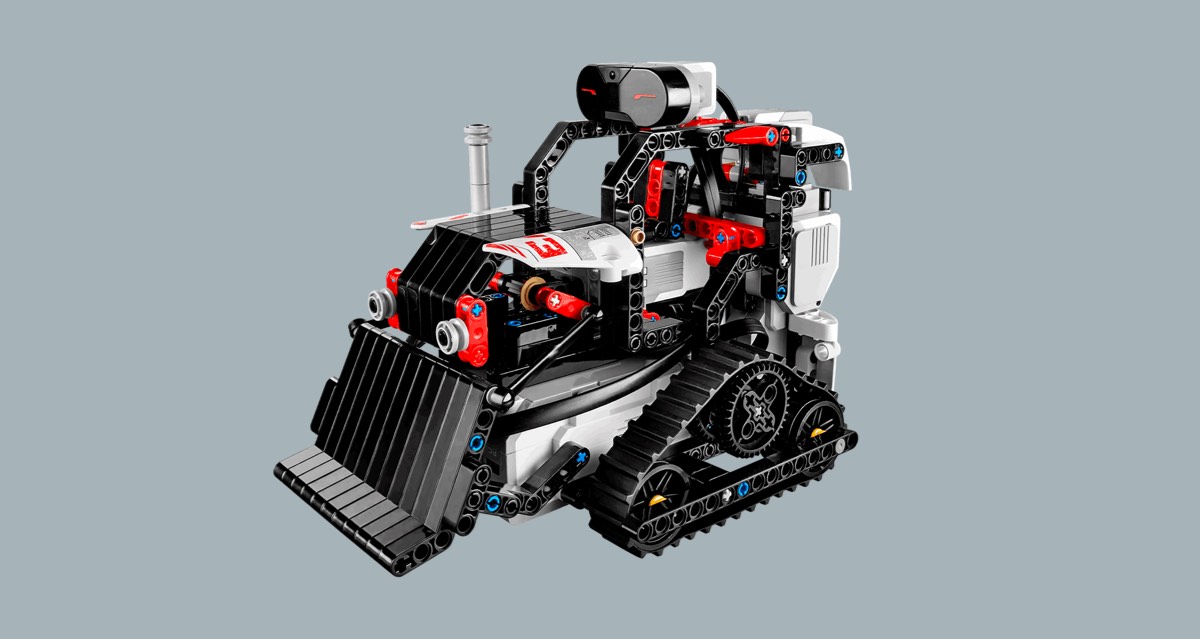
Разработчик Марк Кросби (Mark Crosbie)
Этот робот-бульдозер управляется с помощью ИК-маяка, но может двигаться и самостоятельно, объезжая препятствия, пока расчищает дорогу и передвигает предметы своим бульдозерным ковшом.
Разработчик Мартин Боогаартс (Martyn Boogaarts)
Эта игра в стиле традиционных игровых автоматов проверяет скорость реакции. Робот поднимет диски, а ты должен как можно быстрее ударить по ним молотком. Предложи друзьям устроить соревнование, чтобы выяснить, кто из вас быстрее всех!
Конкурс по сборке Remix Challenge
Собирай крутых новых роботов, смешивая детали LEGO® MINDSTORMS® с деталями своего любимого набора из серии LEGO Technic. LEGO MINDSTORMS и LEGO Technic — идеальное сочетание для создания совершенно нового семейства роботов LEGO с классным дизайном и интересными возможностями. Нажми на изображения ниже, чтобы изучить и построить модели-победители ежегодного конкурса LEGO Remix Challenge: «Часы с кукушкой», собранные из деталей наборов EV3 (31313) и «Грузовой вертолёт» LEGO Technic (42052), и DOODLEBOT, собранный из деталей наборов EV3 и «Экстремальные приключения» LEGO Technic (42069).
Создавай собственные рисунки с помощью модели DOODLEBOT от LEGO® MINDSTORMS® или же переключи её в режим автопортрета, чтобы она нарисовала саму себя. Положи под руку робота чистый лист бумаги, дай ему карандаш и создавай свои шедевры, управляя им с помощью пульта ДУ EV3. Робот уже запрограммирован на три различных режима рисования.
DOODLEBOT — победитель конкурса сборки моделей LEGO MINDSTORMS Remix Challenge 2017 года. Его построили из деталей двух популярных наборов: LEGO MINDSTORMS EV3 (31313) и «Экстремальные приключения» LEGO Technic (42069).
Разработайте, соберите и запрограммируйте роботизированную систему, которая могла бы захватывать и переставлять предметы.

План урока
Подготовка
— Ознакомьтесь с материалами для учителя.
— Если необходимо, разработайте план урока, используя материалы для начала работы из ПО «Лаборатория EV3» или Приложения для программирования EV3. Это поможет познакомить учащихся с конструкторами LEGO ® MINDSTORMS ® Education EV3.
Объяснение (30 мин.)
— Дайте учащимся задание придумать несколько прототипов.
— Предложите им найти новые конструкторские и программные решения.
— Попросите каждую пару учащихся собрать и испытать два решения.
— Раздайте учащимся большие листы клетчатой бумаги, цветные карандаши или маркеры.
Объяснение (60 мин.)
— Попросите учащихся протестировать свои решения и выбрать лучшее из них.
— Убедитесь, что они могут подготовить свои таблицы результатов испытаний.
— Дайте каждой команде немного времени, чтобы завершить свой проект; затем соберите материалы, в которых они зафиксировали результаты своей работы.
Дополнение (60 мин.)
— Дайте учащимся немного времени, чтобы подготовить итоговые отчёты.
— Проведите обсуждение, в ходе которого каждая группа расскажет о результатах своей работы.
Оценка
— Дайте оценку работе каждого учащегося.
— Для упрощения этой задачи вы можете использовать раздел оценки.
Начало обсуждения
Манипуляторы — один из видов промышленных роботов, которые могут перемещать предметы с одного заданного места на другое. Для более точного и безопасного захвата и установки предметов различной формы, веса и уровня хрупкости можно использовать разные виды захватов.

PLAY
Поощряйте активное обсуждение идей.
Предложите учащимся ответить на следующие вопросы.
- Что представляют собой манипуляторы и где они используются?
- Какой приводной механизм можно использовать, чтобы поднять предмет?
- Как робот может переместить предмет?
- Каким образом робот может осторожно и точно переместить предмет?
Попросите учащихся задокументировать свои первоначальные идеи и объяснить, почему они выбрали то или иное решение для создания своего первого прототипа. Попросите их описать, каким образом они будут оценивать свои идеи в процессе выполнения данного проекта. В процессе рассмотрения и повторения учащиеся получат определённую информацию, которую смогут использовать для оценки эффективности своих решений.
Дополнительно
Развитие языковых навыков
Для развития языковых навыков попросите учащихся:
- использовать свои записи, наброски и/или фотографии, чтобы подвести итоги этапа разработки и подготовить итоговый отчёт;
- снять видео, в котором рассказывалось бы о процессе разработки их решения, начиная с первоначальных идей и заканчивая финальным этапом реализации проекта;
- подготовить презентацию, рассказывающую об их программе;
- подготовить презентацию, рассказывающую об их решении и аналогичных системах, используемых в реальной жизни, а также описывающую новые изобретения, которые можно создать на основе их решения.
Вариант 2
Для развития языковых навыков попросите учащихся:
Исследуйте различные механизмы, использующиеся для производства лекарственных препаратов и вакцин, и затем подготовьте рассказ о работе в автоматизированной фармацевтический лаборатории, сделав акцент на преимуществах и недостатках автоматизации процесса приготовления лекарств.
Обсудите вопросы обеспечения безопасности данных и защиты авторских прав на формулы лекарств, способных принести владельцам миллиардные прибыли и хранящихся в онлайн-системах, в том числе:
возможные последствия утери формул лекарств;
преимущества хранения конфиденциальной информации в онлайн-системах.
Развитие математических навыков
На этом уроке учащиеся собрали робота-манипулятора. Оценка и улучшение производительности крайне важны для любых автоматизированных систем. Машинное обучение — процесс, при помощи которого роботы-манипуляторы оценивают собственную производительность и вносят в производственные процессы изменения, необходимые для ее улучшения.
Для развития математических навыков и изучения машинного обучения попросите учащихся:
- дать определения терминов точности и аккуратности и применить их в своих робототехнических проектах;
- определить переменные, по которым можно оценить точность и аккуратность разработанных учащимися систем (например, скорость робота может влиять на аккуратность, точность или на обе эти характеристики);
- подготовить и провести мини-эксперимент, чтобы определить, влияют ли выбранные переменные на аккуратность, точность или на обе эти характеристики.
Советы по сборке
Идеи для вдохновения
Дайте учащимся возможность собрать несколько моделей, инструкции для которых можно найти по следующим ссылкам. Предложите им изучить работу этих систем и на их основе подготовить Техническое задание.
Советы по тестированию
Предложите учащимся сконструировать собственную испытательную установку и разработать порядок испытаний, который позволил бы выбрать наилучшее решение. Следующие советы помогут учащимся провести испытания.
- Отметьте положение карандаша/маркера, установленного в механизме, на клетчатой бумаге. Это позволит возвращать его в то же положение каждый раз при проведении нового испытания.
- Используйте квадраты 1 x 1 см на клетчатой бумаге, чтобы записывать результаты каждого испытания.
- Используйте цветные карандаши или маркеры, чтобы отметить ожидаемое и фактическое положение перемещённого роботом предмета.
- Подготовьте таблицы результатов испытаний, чтобы записывать в них результаты своих наблюдений.
- Оцените точность работы своего робота, сравнив ожидаемые и фактические результаты.
- Проведите испытания по меньшей мере три раза.
Пример решения
Далее приведён пример решения, соответствующего критериям Технического задания.


PLAY
Советы по программированию
Пример программы, созданной в EV3 MicroPython
Перспективы профессионального развития
Учащиеся, которым было интересно данное задание, могут попробовать себя в следующих сферах деятельности:
- информационные технологии (программирование);
- производство и инженерное дело (машиностроение).
Возможности для оценки
Журнал педагога
Разработайте критерии оценки, максимально соответствующие вашим задачам, например следующие.
1. Задание выполнено не полностью.
2. Задание выполнено полностью.
3. Результаты превзошли ожидания.
Используйте следующие критерии для оценки успеваемости учащихся.
- Учащиеся могут оценить различные варианты решений на основе выбранных критериев и компромиссов между ними.
- Учащиеся самостоятельно разрабатывают работающие и креативные решения.
- Учащиеся могут понятно рассказать о своих идеях.
Самостоятельная оценка
Когда учащиеся получат первые сведения об эффективности моделей, дайте им время, чтобы оценить свои решения. Вы можете задать следующие вопросы.
- Ваше решение соответствует критериям технического задания?
- Можно ли сделать движения вашего робота более точными?
- Какие способы решения этой задачи нашли другие команды?
Попросите учащихся придумать и задокументировать два варианта усовершенствования их решений.
Оценка одноклассников
Организуйте процесс оценки решения одноклассниками, в ходе которого каждая группа должна оценить свой собственный проект и проекты других групп. Это поможет развивать навыки высказывания конструктивного мнения, а также совершенствовать навыки анализа и умение использовать объективные данные для аргументации своей позиции.
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение. Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов.


Оборудование: базовый набор Lego Mindstorms Education EV3, мячик для пинг-понга, ёмкость/корзина.
Описание. Манипулятор (лат. manipulare — руководить, управлять с помощью рук) — сложный механизм для управления положением предметов. Манипуляторы могут перемещать, вращать, переставлять, сортировать различные предметы.
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение.
Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов. Корзины может и не быть, а рабочий сектор поиска руки манипулятора ограничен 180 градусами.
Нам нужно придумать такую программу, которая позволила бы решить поставленную задачу, не выведя манипулятор из строя (нужно вращать руку и корпус манипулятора только в рабочем диапазоне углов поворота).
Язык программирования: EV3-G.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Занимаясь на спецкурсе «Конструирование» мне приходилось собирать разные модели из конструктора Лего, но модель манипулятора я не собирал. За последнее время появилось много видеороликов про такие устройства, можно увидеть, как они устроены и как работают. Но всегда интереснее увидеть работу такого устройства вживую, поэтому я решил собрать эту модель.
Актуальность темы.
На уроках технологии в 7 классе при изучении технологических систем рассматривают разные механизмы и электротехнические устройства, в том числе на примере манипулятора. Этот материал подробно изложен в учебниках, при выполнении заданий учащиеся пользуются теоретической информацией. Если построить модель манипулятора, то урок будет проходить интереснее и более наглядно.
Постановка проблемы.
Хотелось, чтобы для проведения уроков технологии по изучению механизмов и электротехнических устройств в технологических системах использовалась рабочая модель манипулятора, но в настоящее время такой модели нет.
Цель проекта.
Разработать и построить действующую модель манипулятора в форме руки из конструктора Лего на основе микропроцессора EV–3.
План работы над проектом.
- Проанализировать существующие решения.
- Составить техническое задание на проектирование.
- Разработать и описать конструкцию манипулятора.
- Написать программу управления конструкцией.
- Протестировать модель.
- Оценить получившиеся результаты.
I. Исследование по проблеме.
1.1 Анализ существующих решений.
Манипулятор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века , благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности. Используется для перемещения различных грузов, получил широкое развитие в современном обществе. Дело в том, что многие материалы, с которыми приходится иметь дело в этой области науки, обладают радиоактивностью – свойством выделять в окружающее пространство опасные для здоровья человека лучи. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.


Рисунок 1. Манипулятор в металлургии
Кран-манипулятор — кран стрелового типа, установленный на автомобильном шасси и служащий для его загрузки и разгрузки одиночными и сыпучими грузами в контейнерах и их транспортировки.

Рисунок 2. Передвижной кран-манипулятор
Для людей с ампутированной конечностью существует Бионический протез.
Bebionic —биоэлектрическая искусственная кисть с приводом электромеханическим и микропроцессорным контролем, созданная для восстановления функции ампутированной конечности.

Рисунок 3. Бионический протез
Принцип действия бионического протеза:
После травмы или в ходе болезни конечность ампутируют. Оставшаяся культя состоит из множества тканей: кожи, мышц, костей, сосудов и нервов. Хирург во время операции выводит сохранившийся двигательный нерв на остающуюся крупную мышцу. После заживления операционной раны нерв может передавать двигательный сигнал. Этот сигнал воспринимает датчик, установленный на протезе. В процессе восприятия нервного импульса участвует сложная компьютерная программа.
Минусы такого протеза:
У такого протеза единственный минус. Это его стоимость.Стоимость бионического протезирования пока высока и может достигать в сложных случаях миллионов рублей. Однако возврат к полноценной жизни трудно оценить в материальном исчислении. По сути, установка бионических протезов – единственная возможность для инвалида вернуться к нормальной жизни: строить и осуществлять планы, содержать семью, добиваться карьерных вершин.
NiryoOne – это 6-осевой манипулятор, созданный специально для производителей, системы обучения и небольших компаний. Согласно Niryo, имеющий шесть осей перемещения манипулятор позволяет выполнять задачи, которые до сих пор были доступны исключительно промышленным роботам. Манипулятор может выбрать и положить на место предметы с помощью вакуумного насоса, захвата или электромагнита. Он поможет автоматизировать 3D-принтер, позволит сверлить отверстия в изделиях. Он может выполнять необходимые домашние работы и даже творчески развлекать детей.

Рисунок 4. Манипулятор серии NiryoOne
Минусом такого манипулятора является его большая стоимость, его можно приобрести за сумму 20000 – 200000 долларов.
1.2 Техническое задание на проектирование.
Проведя анализ существующих манипуляторов, делаем вывод, что форма устройства напоминает руку человека, движения осуществляются с помощью механизмов, таких как рычаг, зубчатые передачи.
Необходимо спроектировать и собрать механическую руку из конструктора ЛЕГО. Манипулятор должен захватывать предметы и перемещать их в нужное место. Для обеспечения автоматической работы устройства необходимо программное обеспечение.
II. Практическое решение проблемы.
2.1 Разработка и описание конструкции манипулятора.
1 ) Для создания самой руки требуется основание, которое могло бы удержать эту руку. После сборки основания на него нужно установить Миникомпьютер Lego MINDSTORMS EV3 и Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом, которые приводили бы в движение руку, а также датчик касания, при нажатии на который рука бы останавливалась в нужном месте.

2) После сборки основания создаем саму руку. Для того, чтобы рука могла подниматься или опускаться, ставим на конструкцию руки Большой Сервомотор Lego MINDSTORMS EV3 с зубчатым механизмом и датчиком цвета, для того чтобы рука поднималось на определенную высоту.

3) После сборки конструкции руки нужно собрать захватывающий механизм из Среднего Сервомотора Lego MINDSTORMS EV3, с зубчатым механизмом выполняющий роль пальцев.




4 ) После сборки захватывающего механизма устанавливаем его на конструкцию руки и подключаем все сервомоторы и датчики к Миникомпьютеру.

2.2 Разработка и описание ПО.
Прежде чем приступать к составлению компьютерной программы, необходимо составить логическую последовательность действий манипулятора.
Сомкнуть захват, захватив предмет.
Повернуть манипулятор на определенный угол.
Повернуть манипулятор в исходное положение.
Повторить программу необходимое число раз.
В системе ПО записывается подпрограмма для калибровки и синхронизации моторов:

Затем записываем основную программу. Для этого мы должны в программе запрограммировать две кнопки, при нажатии одной из них рука повернулась в определенную сторону, в зависимости от того, где находится предмет:

Потом мы должны запрограммировать средний и большой сервомотор, находящиеся на конструкции руки для того, чтобы рука опустилась с помощью большого сервомотора и захватила предмет с помощью среднего сервомотора:

После того, как рука захватила предмет, мы записываем в программе для большого сервомотора на основании программу для возращения руки в то же положение, в котором она была изначальна. И для среднего, и большого сервомотора находящиеся на конструкции руки мы записываем программу для того, чтобы рука опустилась и отпустила предмет:

1.Оценка проекта.
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует техническому заданию на проектирование. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, затем поворачивается на заданный угол, опускает предмет и раскрывает захват, долее поднимается и возвращается в исходное положение. Работа манипулятора выполняется по заданной программе.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии в 7 классе при изучении механизмов и электротехнических устройств в технологических систем.
Работая над этим проектом, мне потребовались такие умения, как: находить и обрабатывать информацию, читать схемы, чертежи, моделировать и конструировать устройства из конструктора Лего, составлять компьютерную программу, используя язык объектно-ориентированного программирования, работать с текстовым редактором, создавать презентацию в приложении Power point.
Читайте также: