
Робот пылесос из лего
Обновлено: 24.04.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Муниципальное бюджетное учреждение дополнительного образования
Центр внешкольной работы г. Белорецк
муниципального района Белорецкий район Республики Башкортостан
муниципальный конкурс исследовательских работ
«Взгляд в будущее»
«РОБОТ -ЛИСТОЕД»

Работу выполнил :
МБУ ДО ЦВР г. Белорецк
Научный руководитель:
Бодрова Е.А., педагог дополнительного образования
Белорецк, 2019 г.
С самого раннего возраста родители учат нас не мусорить на улице, всегда убирать за собой мусор и не бросать его просто так, а обязательно нести в урну. Когда я иду по улице, я всегда обращаю внимание на чистоту и думаю, какая сложная работа у дворников. Современные люди стремятся к комфортной жизни в условиях «умной среды». Труд человека заменяется бытовыми приборами. Дома, снабженные техникой, подключают к системе «Умный дом», которым хозяин управляет на расстоянии. Роботы уже давно вошли в нашу жизнь и помогают делать ее проще. Сегодня во многих сферах деятельности, человека заменяют автоматические устройства, которые способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую [ 3 ,20]
При всем при этом на улицах нашего города по-прежнему работают мусороуборочные машины, в кабинах которых сидят люди, и чистят они исключительно только дороги и редко тротуары, площади. Осень доставляет немало хлопот дворникам: надо убирать опавшие листья, подметать дорожки, собирать и утилизировать накопившийся за лето мусор. Работу дворников тоже может выполнить робот, и такого робота я решил создать.
Цель : разработка модели автономного робота уборщика, облегчающего труд дворников по сбору опавших листьев.
· собрать необходимый информационный материал по данной теме;
· изучить алгоритмы движения робота LEGO Mindstorms EV 3;
· создать конструкцию робота, способного в автоматическом режиме собирать листья и помещать в определенный контейнер;
· разработать программу для автоматической работы робота в среде EV 3;
· обработать результаты, сделать выводы и подготовить презентационный материал.
Для решения поставленных задач использовался комплекс методов: изучение и анализ литературы по проблеме исследования, в том числе из сети Интернет, сбор информационного материала, его анализ; обобщение, эксперимент; формулирование выводов по результатам исследования.
Следующим этапом подготовки к работе было составление плана работы:
1) изучение проблемы, которую будет решать робот;
2) изучение интернет ресурсов, выбор конструкции изделия;
3) конструирование корпуса;
4) конструирование установки захвата листьев;
5) разработка плана движения робота;
6) подготовка презентации и разработка инженерной книги;
Решать экологические проблемы нужно комплексно, задействуя все доступные инструменты. Все чаще роботы становятся частью борьбы за «зеленое» будущее , я познакомился с роботами, помогающие решить экологические проблемы
1) DustClean – уборщик улиц (рис 1 )– это часть проекта DustBot итальянских ученых, с помощью чувствительных сенсоров робот распознает препятствия, людей и не представляет опасности для транспортного движения. Уборщик DustClean компактный и мобильный, он предназначен для работы на узких улицах, в пешеходных зонах. Для запуска достаточно задать маршрут.

3) Сlark (рис 2) – сортировщик на заводе . Это т робот с искусственным интеллектом, запрограммированный на распознавание и отбор упаковок TetraPak. С помощью камеры Clark сканирует содержимое сортировочной ленты, при обнаружении нужного вида сырья роботизированная «рука» с присосками убирает его в отдельный контейнер.Clark отбирает мусор со скоростью 60 единиц в минуту, точность сортировки – до 90%.

4) Recycler (рис3) – сортировщик строительного мусора. Финская компания ZenRobotics создала искусственный интеллект для сортировки строительного мусора. Его научили находить и распознавать около десяти видов отходов.

5) Hoola One (рис 4) – пылесос для пляжей. Микропластик является одним из опаснейших загрязнителей среды, так как извлечь его оттуда не представляется возможным. Но появляются изобретения, бросающие вызов этому утверждению. Пылесос для пляжей Hoola One втягивает в себя песок с загрязнениями, сортирует содержимое по весу: песок и камни тяжелее, они идут на дно аппарата и возвращаются на пляж, а пластик отправляется в отдельный контейнер[7, 46]

6) WasteShark (Рис 5 ) – плавающий poбот. WasteShark разработан по прототипу китовой акулы, только вместо рыб он питается мусором. Робот предназначен для закрытых водных пространств: порты, пруды, озера

7 ) So cial Trash Box (рис 6) – урна на колесах . Японские ученые создали умные передвижные урны. Работают они так: 20-литровый контейнер на колесах с помощью датчика тепла находит человека, приближается к нему, с помощью камеры и распознавательного алгоритма он идентифицирует мусор в руках людей, затем звуком и движениями привлекает внимание того, кто держит мусор и просит бросить его в контейнер .

8) Geckon – уборщик космоса (рис 7) Группа инженеров сконструировала аппарат по образу лапы геккона. «Лапки» робота оборудованы манипуляторами с поверхностями для захвата объектов. На них расположены тысячи липких волосков, которые и ловят космический мусор.

9) «Колосс» – робот-пожарный (рис 8). В 2017 году французская компания Shark Robotics разработала водонепроницаемого и огнеупорного робота для тушения пожаров в экстремальных условиях. Для пожарных работа в горящих деревянных зданиях очень опасна.

Прочитав и проанализировав данную информацию, я считаю, что РОБОТЫ — могут нам помочь: собирать, сортировать, утилизировать и перерабатывать мусор.
Цель: выбрать модель будущего робота и сконструировать его из деталей конструктора LEGO Mindstorms EV 3.
Рассмотрение различных вариантов конструкции робота.
1. Конструирование корпуса .
2. Конструирование захват ывающего механизма
3. Сбор всех частей робота.
В ходе работы над моделью робота, я понял что, для очистки территории чаще всего используют грабли или жесткие метлы, которыми вооружают дворников, но эти инструменты не слишком эффективны, а также не универсальны, ведь метлы хорошо подходят только для очистки твердых и гладких поверхностей, а грабли применяют для очистки неровных территорий, таких, как: гравийные покрытия, газоны с невысокой травой, участки с раскисшей от влаги землей или глиной.
Было принято решение создать робота – листоеда, который на определенной территории, путем захвата, собирал опавшие листья, попадавшие в специальный контейнер.
Конструкция робота-листоеда
Ходовая часть.
1) Ходовая часть робота состоит из двух моторов, подсоединённых к портам B и D , и двух пар больших колёс.


2) Добавил вал для захвата листьев

3) Я поставил захватывающий механизм для сбора листьев в определенный контейнер

Захватывающий механизм
Захватывающий механизм состоит из среднего мотора и 3 зубчатых колёс и гусениц


Процесс сборки


Программирование движения робота для уборки листьев
1. Изучение новых блоков языка программирования EV 3.
2.Рассмотрение различных алгоритмов выполнения задания.
3.Знакомство с циклом, установкой комментариев.
Программа для робота – листоеда

Выводы: выполнив данный проект, я достиг своей цели, создал своего собственного робота-листоеда! В результате проделанной работы я узнал много нового, прочитал много литературы.
Как видите, мой робот не требует особых навыков в работе . Конечно, мой проект не решит все задачи, связанные с уборкой уличной территории, н о собрать листья в определенный контейнер вполне сможет.
LEGO ® MINDSTORMS ® EV 3
Ресурсный набор LEGO ® MINDSTORMS ® EV 3
Используемые контроллеры, моторы, датчики (модель EV 3)
Модуль EV3 – 1 шт.
Средний сервомотор -2 шт
Большой мотор - 2 шт.


Список использованной литературы
1. Барсуков, А.П. Кто есть, кто в робототехнике / А.П. Барсуков. - М.: Книга по Требованию, 2014. - 128 c.
2. Иванов, А. А. Основы робототехники / А.А. Иванов. - М.: Форум, 2014. - 224 c.
3. Копосов, Д. Г. Первый шаг в робототехнику. 5-6 классы. Рабочая тетрадь / Д.Г. Копосов. - М.: Бином. Лаборатория знаний, 2016. - 229 c.
4. Макаров, И. М. Робототехника. История и перспективы / И.М. Макаров, Ю.И. Топчеев. - М.: Наука, МАИ, 2017. - 352 c.
5. Филиппов С.А. Робототехника для детей и родителей. - СПб.: Наука, 2015. – 319 с.
Чем чаще натыкаюсь на рекламные статьи роботов-пылесосов, тем более непреодолимое желание у меня возникает поделиться с вами своим опытом его эксплуатации.
Тем более, в комментариях к моим статьям про швабры , многие писали: "Купите себе робот-пылесос и не будет у вас проблем)))" Ну, ну..
Купили мы его в 2011 году, как раз когда они только начали активно появляться. Выбрали на тот момент одну из самых хороших моделей. Да и сейчас, в сравнении с современными, она не особо уступает.
Наша модель: iClebo Arte
Что он может:
✅ При первом запуске, с помощью камеры, робот сканируем потолок и определяет и запоминает границы комнат.
✅ В дальнейшем, он проходит все комнаты и возвращается на базу.
✅ Если зарядка подходит к концу, а уборка еще не закончена, пылесос возвращается на базу для подзарядки, а затем продолжает уборку с того места, где остановился.
✅ В комплекте есть тряпка для влажно уборки. Можно ее прикрепить и пылесос будет одновременно и собирать пыль и мыть пол.
А теперь, как реально работает робот-пылесос
⚠️ Во-первых, шумно ! И это касается не только нашего робота пылесоса, а всех.
Недавно были в гостях у родственников, они недавно купили себе 2 новых робота (на первый и второй этаж дома) последнего поколения iRobot. И когда мы были в доме, один из роботов как раз делал уборку. Так вот шумит он точно также как и наш.
Это, конечно, не тот шум, что создает обычный пылесос :))) Нет! Но это постоянный, длительный шум. Это отвлекает и раздражает. Робот работает долго. Чтобы пройти нашу квартиру в 112 кв.м. ему требовалось около 1-1,5ч.
Когда был маленький ребенок, мы его не включали на время сна, а когда ребенок бодрствовал, то он все время норовил сесть на работающий пылесос. В общем, года два он у нас простоял.
Таким образом робот можно запускать только когда никого нет дома, а у нас это редкость.
⚠️ Во-вторых , его боковые щетки запутываются во всех проводах, шнурках, тонкой ткани, шторах (тюль). И робот встаёт, мигая ошибкой. Чтобы его перезапустить, нужно для начала распутать его, а потом отнести его обратно на базу и затем он начнет уборку с самого начала, даже если запутался в конце уборки.


Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.

Конструкция робота простая и собрать его можно очень быстро. Инструкцию для сборки вы можете найти ниже. Я использовал набор LEGO Mindstorms Education EV3 (45544), при большом желании можно сделать аналогичного робота из домашней версии (31313), но тогда нужно будет менять программу.
Чтобы робот помыл пол, написана простая демонстрационная программа. Программа рассчитана на то, что помещение будет прямоугольное. Робота нужно расположить в углу комнаты, чтобы рядом слева была стенка. После этого программу можно запускать. Ниже на схеме показано как двигается робот.
К сожалению, стандартный гироскоп LEGO не очень точно измеряет угол поворота и робот может постепенно уходить с прямой линии, поэтому лучше, если помещение будет поменьше. А ещё лучше использовать более точный гироскоп стороннего производителя.

А вот видео, где вы сможете оценить, как двигается робот:
Инструкция для сборки робота мойщика пола из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Демонстрационная программа для робота мойщика пола, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.

Домашнее задание к проекту 4 "WeDo 2.0. Ременная передача" КЭС: 1. Конструирование и моделирование 2. Практика работы на компьютере 3. Робототехника 4. Учебно-исследовательская и проектная деятельность 5. Владение терминологией, понятиями, методами и приемами конструирования, моделирования и роботостроения 6. Моделирование, конструирование и оформление модели конструкций и роботов 7. Создание роботов различного вида
Тетрадь для домашних заданий Домашнее задание к четвертому занятию.
Помнишь робота уборщика?
Соберём такого же в LEGO DIGITAL DESIGNER.
В подарок – пошаговая инструкция.
Выберете тему: LDD Extended.
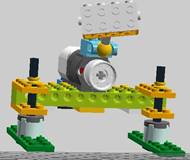
Найдите PLATE 2X6 W. HOLES. Сразу раскрасьте: Bright Yellow. Поставьте сверху BRICK 2X4.
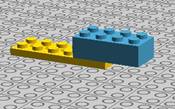
И ещё два BRICK 2X4.
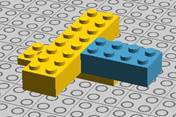
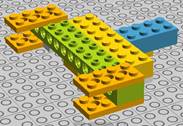
Рядом ставим два TECHNIC BRICK 1X12, Ø4,9.
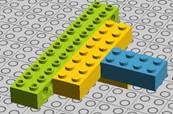
Снизу две PLATE 1X4.
Рядом с ними PLATE 2X4, 3XØ4.9.
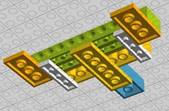
И две такие же сверху.
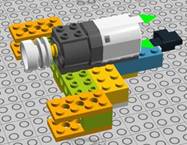
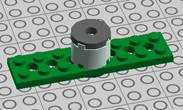
Укрепляем мотор: LPF2.0 MEDIUM MOTOR.
Вставьте ось CROSS AXLE 3M в мотор и оденьте на неё втулку 1/2 BUSH.
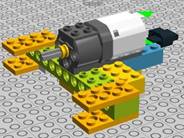
Затем оденьте шкив RIM WIDE 18x14 W. CROSS Ø4.8.
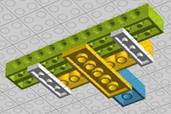
Соберём руки-ноги для уборки J
PLATE 2X8 W. HOLES, BRICK Ø16 W. CROSS, FLAT TILE 2x2 ROUND W. HOLE Ø4.85
SLIDE SHOE ROUND 2X2
(для лучшего скольжения – лучше деталей не найти)

Сгруппируем: Ctrl+G, переместим группу, как показано на рисунке ниже, и воткнем сверху черную ось на 6: CROSS AXLE 6M.

Скопируйте группу, пользуясь кнопкой копировать:
Как называется передача с большого ведущего на малый ведомый шкив?
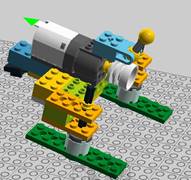
Займёмся головой робота.
Сначала соберём шею:
в BRICK 2X2 W. CUP FOR BALL вставим VOODOO BALL Ø10,2.
Это подвижное соединение, наш любознательный робот сможет легко поворачивать голову.

Закончим шею робота:
VOODOO BALL Ø10,2 и ещё один VOODOO BALL Ø10,2.
Скопируем и повернём CUP FOR BALL:
Добавим PLATE 2X4, 3XØ4.9 и по бокам головы два:
BRICK 1X1 W. 1 KNOB– для крепления ушей-антенн.
Основой лица робота будут служить два ANGLE PLATE 1X2 / 2X2.
Вставим ушки-антенны: MINI ANTENNA

И заключительные штрихи – глаз и щёчки J FLAT TILE 2X2, ROUND и две FLAT TILE 1X2
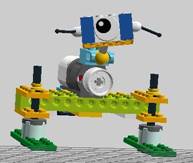
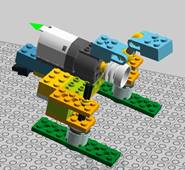
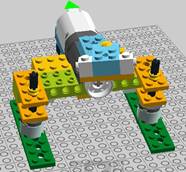
Младший братишка Валли и Майло готов!
Придумайте ему имя и вспомните, как называется передача, позволяющая нашему роботу заниматься уборкой.
Задание 2 (для терпеливых и настойчивых)
Прикрепите к нашему роботу хаб на колёсах, чтобы он мог возить с собой источник питания.
Выложите своего робота в галерею LDD.
На следующем занятии мы познакомимся с ещё одним полезным видом передачи – аналогичным ременной полуперекрёстной: коронной зубчатой. Она поможет нам изменить угол вращения мотора на 90 градусов в моделях карусель и тележка с попкорном.

Диаметр робота 34 сантиметра, высота 9 сантиметров. Корпус робота сделан из вспененного ПВХ толщиной 4 мм.
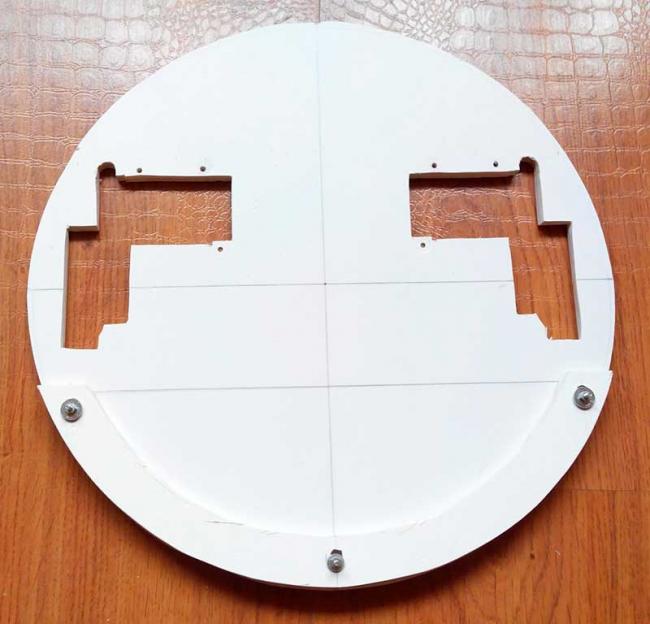
Сначала основание вырезал из фанеры, но она крошится и отслаивается. Решил делать из ПВХ. Склеил вместе два куска 4 миллиметрового ПВХ и вырезал из этого бутерброда основание диаметром 33 сантиметра. Потом прорезал отверстия для колес.
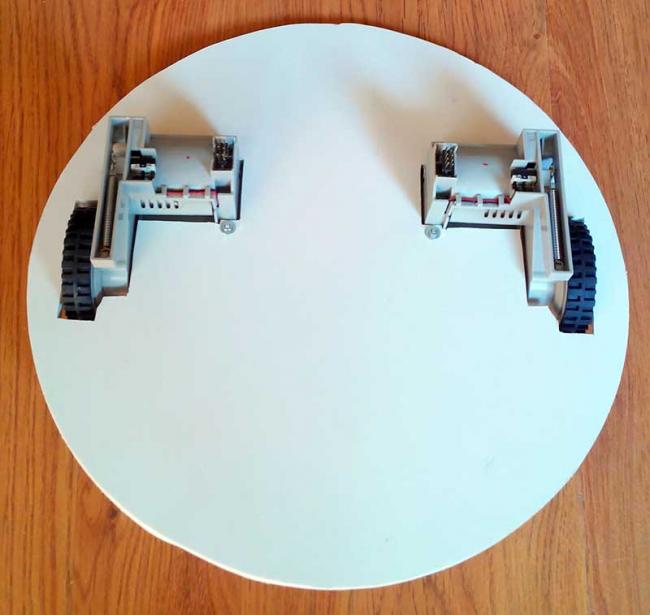
Примерил колеса.
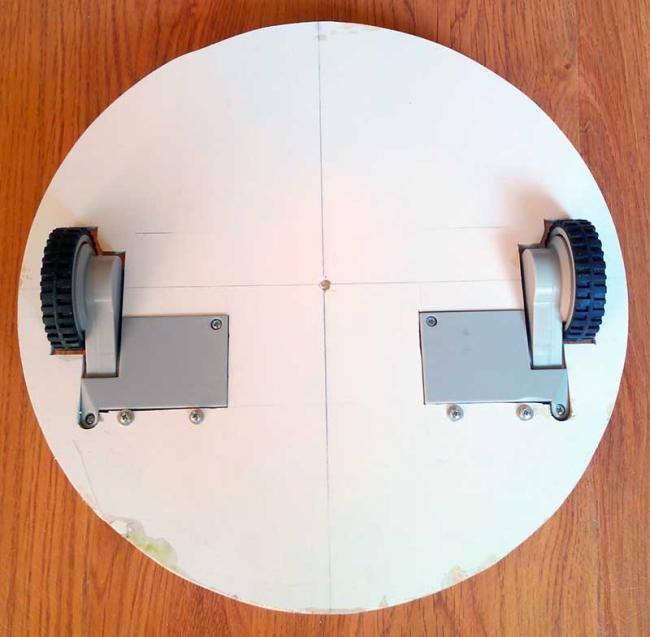
Вид снизу.
Сделал крепления для бампера.
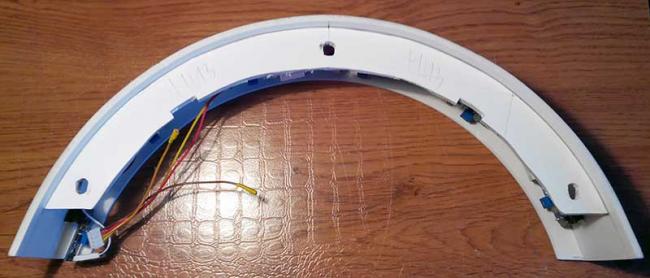
Чтобы ровно согнуть переднюю часть бампера, воспользовался большой кастрюлей. Взял полоску ПВХ, нагрел обычным феном , прижал к кастрюле с помощью ремня и продолжал греть, подтягивая ремень. Когда все это дело остыло, приклеил крепление бампера.
Вырезал дугу и приклеил её сверху бампера, для жесткости.
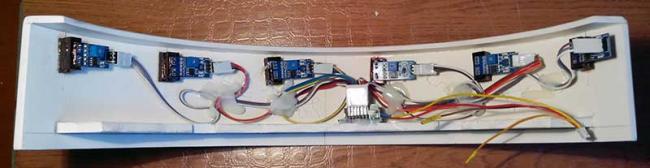
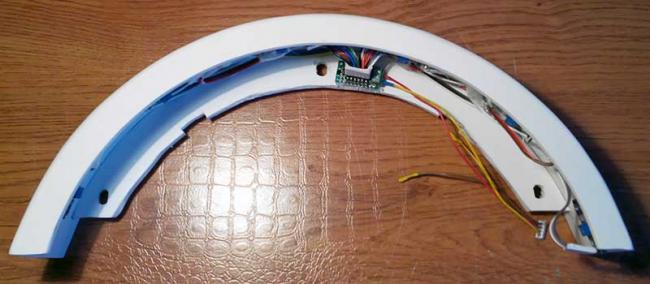
Насверлил отверстий и приклеил инфракрасные датчики препятствия. Датчики пришлось немного перепаять. У них ИК-диоды были припаяны с другой стороны платы и не было бы возможности регулировать расстояние до препятствия с помощью подстроечных резисторов.

Соорудил такую конструкцию, чтобы не тянуть от каждого датчика по три провода к основной плате. Получилось вместо 18 проводов, всего 8, шесть сигнальных и два питание.

Крыльчатку для турбины вытащил из автомобильного пылесоса, который приобрел за 200 рублей.
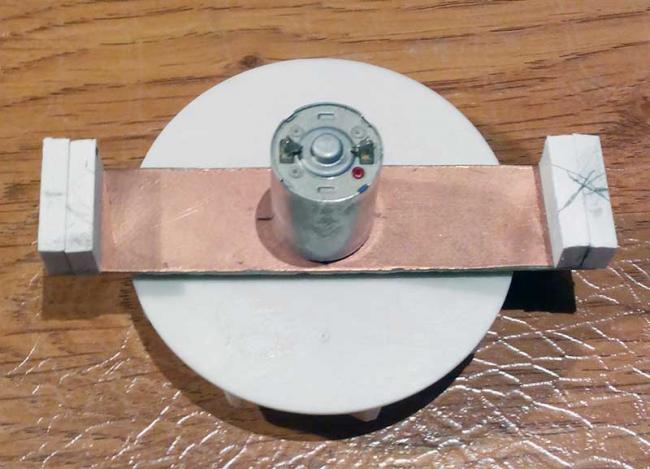
Вырезал крепление для мотора, закрепил мотор и одел не него крыльчатку.
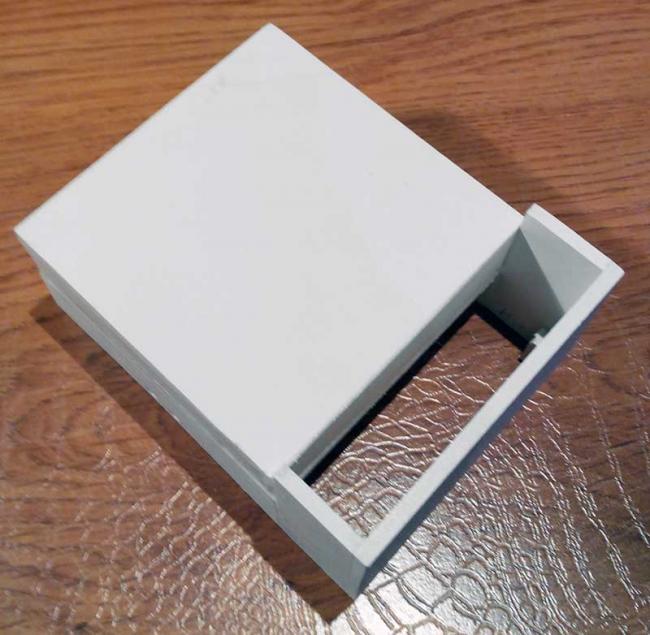
Корпус турбины.

Вид снизу.
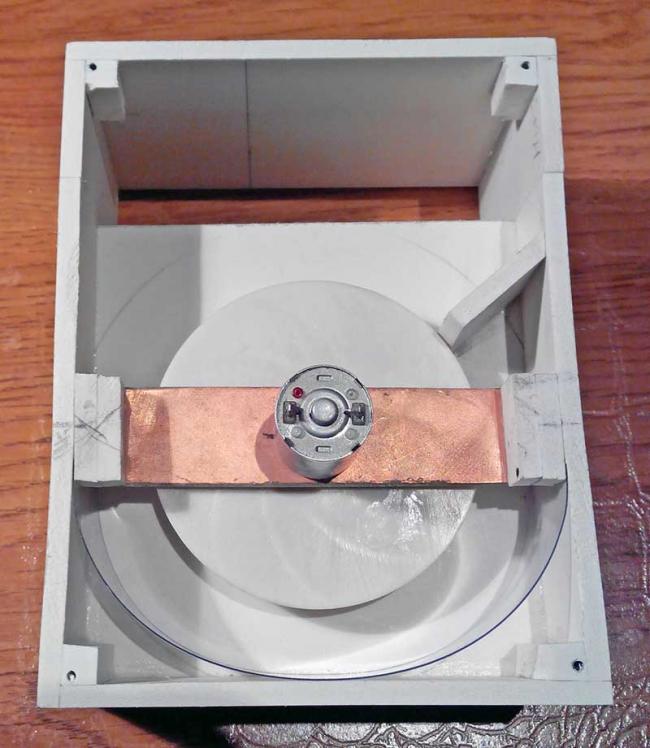
Закрепил мотор с крыльчаткой в корпусе.

Мотор оказался немного длиннее и пришлось вырезать под него отверстие в дне турбины и в основании пылесоса.
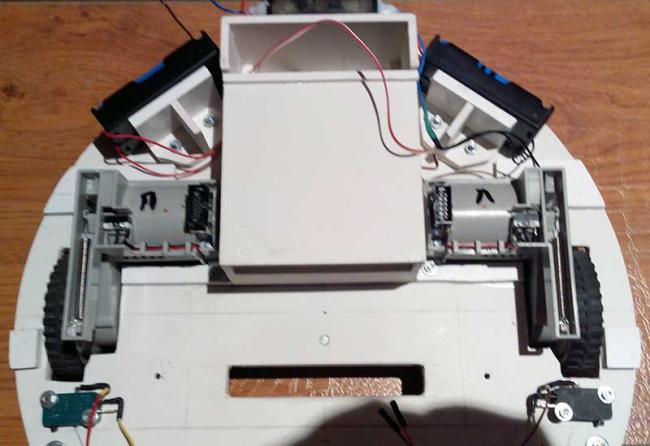
Прикрутил турбину к основанию, сделал крепления для аккумуляторов, закрепил выключатели столкновения и прорезал отверстие для пылесборника.
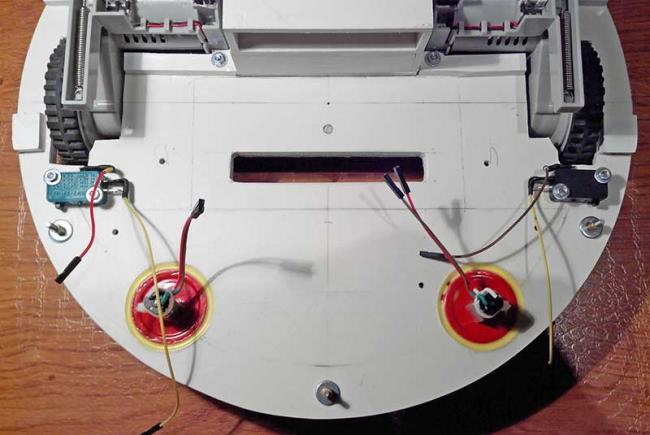
Проплавил два отверстия для моторов, которые будут крутить щетки.
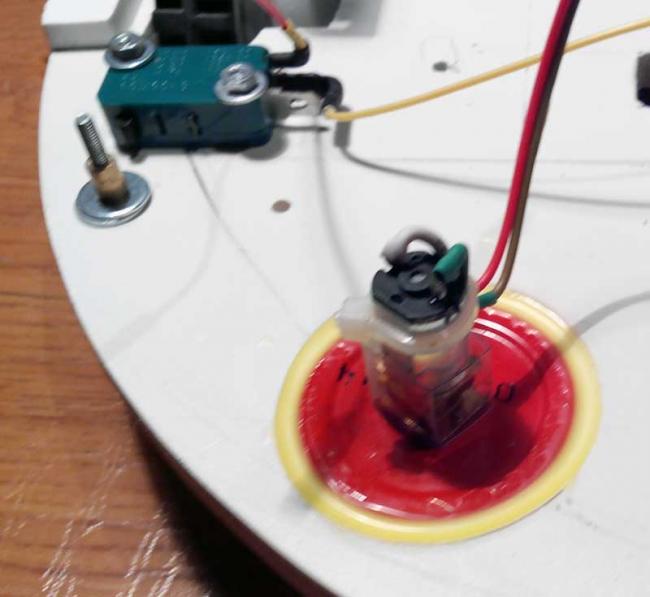
Моторы закрепил на железных крышках из-под соуса, а сами крышки вклеил в основание.
Прикрутил бампер.
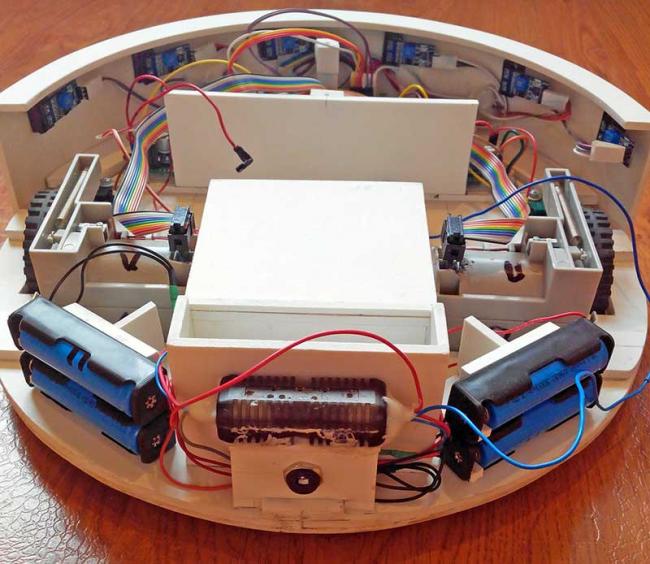
С задней стороны робота стоят аккумуляторы формата 18650. Подключены две пары последовательно.
В черной коробочке находится контроллер заряда — разряда аккумуляторов. Когда АКБ подходит к минимально допустимому разряду, контроллер отключает пылесос, когда заряжается и достигает полной зарядки, то отключает зарядное устройство.
Пылесос с бампером, вид спереди.
Одел верхнюю крышку.

На передней крышке выключатель и разъем для подключения программатора.

Контейнер для пыли и мусора сделал из 4 мм. ПВХ. Фильтр из двух слоев тряпичной салфетки (продается в любом магазине, где торгуют чистящими средствами для дома) и вклеил их в рамку из плотного картона.

Чтобы крышка на контейнере хорошо держалась приклеил к ней и к контейнеру магнитные полоски, от магнитов на холодильник.

Контейнер, вид снизу. Серая точка это магнит, который притягивает контейнер к основанию.
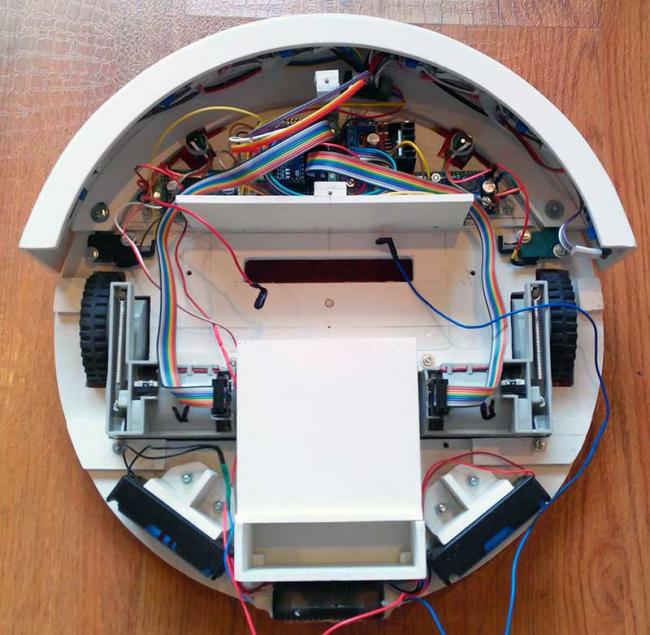
Робот-пылесос вид снизу.
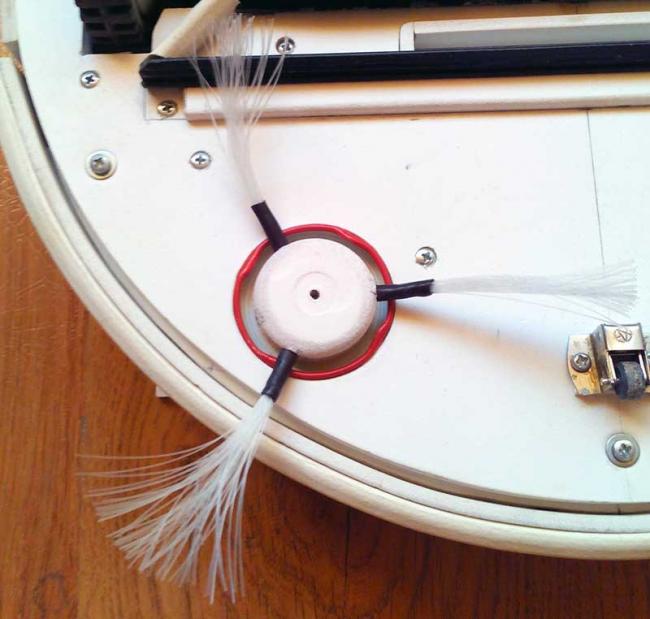
Щетки сделал из лески и вклеил между слоями ПВХ. Колесики временные, пока не найду шариковые высотой не более 2 сантиметров.
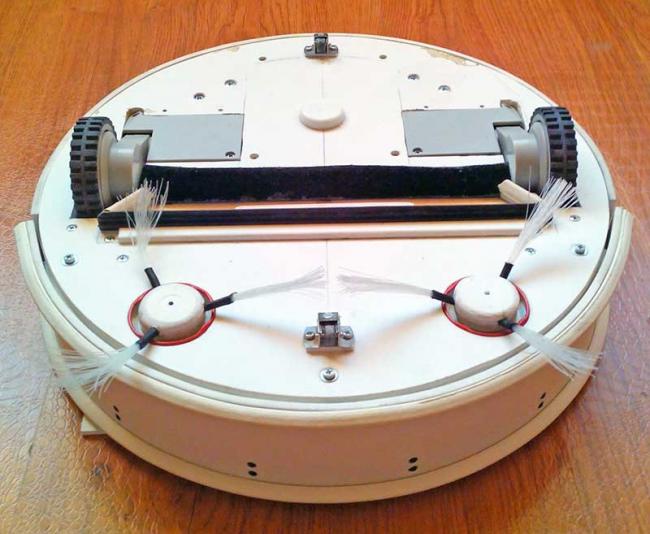
Черная юбка сделана из войлока и крепится на неодимовых магнитах.

Робот-пылесос в сборе.
В следующей части будет электроника, схема, скетч и видео работы робота-пылесоса.
Читайте также: