
Роботы из лего майндстормс ev3 сумо
Обновлено: 26.07.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Министерство образования Республики Саха (Якутия)
Муниципальное казенное учреждение «Управление образования»
муниципального образования «Кобяйский улус (район)»
МКОУ-Ситтинская СОШ имени В.Е. Колмогорова
УЧЕБНО–МЕТОДИЧЕСКИЕ МАТЕРИАЛЫ
«РОБОТОТЕХНИКА»
Для MINDSTORMS Education EV 3»
приложение к дополнительной образовательной программе
РУКОВОДИТЕЛЬ КРУЖКА: Дьяконов Н.Н
учитель физики и информатики
Раздел 1. Введение в образовательную робототехнику
1.2 Введение в образовательную робототехнику
Раздел 2. Базовый набор LEGO MINDSTORMS Education EV3
2.1. Компоненты базового набора
2.2. Система программирования LEGO MINDSTORMS Education EV3
Раздел 3. Практические задания для самостоятельного выполнения
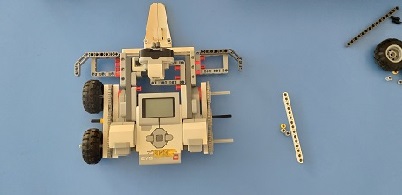
3.1 Вездеход «Тундра»
3.2 Сортировщик шариков
3.5 Вездеход 4 WD
3.6 Робот кресло
3.7 Робот мусорная корзина
3.8 Робот на Треножере
3.9 Амфибия СЛ -007
4. Ожидаемый результат
7. Список использованной литературы.
1.1 ВВЕДЕНИЕ
Учебно-методические материалы (приложение к дополнительной образовательной программе «Робототехника») разработаны для руководителей кружков по робототехнике и предназначена для формирования практических умений и навыков использования базового набора LEGO MINDSTORMS Education EV 3 v 45544.
Учебно-методические материалы документ, фотографии, иллюстрации, проекты детей, доклады и другие графические материалы для самостоятельного выполнения.
Современный человек участвует в разработке, создании и потреблении огромного количества артефактов: материальных, энергетических, и нформационных. Соответственно, он должен ориентироваться в окружающем мире как сознательный субъект, адекватно воспринимающий появление нового, умеющий ориентироваться в окружающем, постоянно изменяющемся мире, готовый непрерывно учиться. Понимание феномена технологии, знание законов техники, позволит младшему школьнику соответствовать запросам времени и найти своё место в современной жизни. Особенно важно не упустить имеющийся у младшего школьника познавательный интерес к окружающим его рукотворным предметам, законам их функционирования, принципам, которые легли в основу их возникновения.
Программа «Робототехника» предназначена для того, чтобы положить начало формированию у учащихся начальной школы целостного представления о мире техники, устройстве конструкций, механизмов и машин, их месте в окружающем мире. Реализация данного курса позволяет стимулировать интерес и любознательность, развивать способности к решению проблемных ситуаций умению исследовать проблему, анализировать имеющиеся ресурсы, выдвигать идеи, планировать решения и реализовывать их, расширить технический и математический словари ученика.
Кроме этого, реализация этого курса в рамках начальной школы помогает развитию коммуникативных навыков учащихся за счет активного взаимодействия детей в ходе групповой проектной деятельности.
Курс разработан для учащихся групп начальной школы.
Учащиеся, работая по инструкциям и заданиям учителя, испытывают собранные модели и анализируют предложенные конструкции. Далее они выполняют самостоятельную работу по теме, предложенной учителем. Помощь учителя при данной форме работы сводится к определению основных направлений работы и к консультированию учащихся.
Самостоятельная работа выполняется учащимися в форме проектной деятельности, может быть индивидуальной, парной и групповой. Выполнение проектов требует от детей широкого поиска, структурирования и анализирования дополнительной информации по теме.
Занятия направления «Робототехника» представляют уникальную возможность для детей младшего школьного возраста освоить основы робототехники, создав действующие модели роботов Mindstorms WEDO и Mindstorms ev 3 45544 .
Благодаря датчикам поворота и расстояния, созданные конструкции реагируют на окружающих мир. С помощью программирования на персональном компьютере ребенок наделяет интеллектом свои модели и использует их для решения задач, которые, по сути, являются упражнениями из курсов математики, информатики.
Программа «Робототехника»рассчитана на 9 час в неделю на протяжении всего учебного года.
Успешность изучения «Робототехника» обеспечивает результативность обучения начальной школы.
На современном этапе экономического и социального развития общества по требованиям ФГОС образования должно быть ориентировано на:
Ø формирование у подрастающего поколения адекватной современному уровню знаний картины мира;
Ø обеспечение самоопределения личности;
Ø создание условий для самореализации личности;
Ø формирование человека, интегрированного в современное общество и нацеленного на совершенствование этого общества;
Ø воспроизводство и развитие кадрового потенциала общества.
Новизна: заключается в изменении подхода к обучению ребят, а именно – внедрению в образовательный процесс новых информационных технологий, побуждающих учащихся решать самые разнообразные логические и конструкторские проблемы
Актуальность: в связи с современным глобальным развитием компьютеризации и роботизации данная дополнительная образовательная программа является актуальной.
Цель программы:
Ø организация внеурочной деятельности детей, раскрытие их творческого потенциала с использованием возможностей робототехники и практическое применение учениками знаний, полученных в ходе работы по курсу, для разработки и внедрения инноваций в дальнейшей жизни, воспитание информационной, технической и исследовательской культуры.
Задачи программы:
Ø развитие интереса к научно-техническому творчеству, технике, высоким технологиям;
Ø развитие алгоритмического и логического мышления;
Ø развитие способности учащихся творчески подходить к проблемным ситуациям и самостоятельно находить решения;
Ø умение выстраивать гипотезу и сопоставлять ее с полученным результатом;
Ø воспитание интереса к конструированию и программированию;
Ø овладение навыками научно-технического конструирования и моделирования;
Ø развитие обще учебных навыков, связанных с поиском, обработкой; информации и представлением результатов своей деятельности;
Ø формирование навыков коллективного труда;
Ø развитие коммуникативных навыков;
Ø робототехника помогает совместно обучаться в рамках одной бригады;
Ø распределять обязанности в своей бригаде;
Ø проявлять повышенное внимание культуре и этике общения;
Ø проявлять творческий подход к решению поставленной задачи;
Ø создавать модели реальных объектов и процессов;
Ø видеть реальный результат своей работы позволяет учащимся.
Просветительно- досуговая работа:
Ø основной задачей просветительной и досуговой работы является: знакомство детей с творчеством ведущих конструкторов, с историей развития роботов, развитие электронного творчества, формирование нравственных и эстетических взглядов, мировоззрения, расширение общего кругозора, развитие культуры общения.
Структура и содержание программы.
В программе «Робототехника»включены содержательные линии:
- аудирование (А)- умение слушать и слышать, т.е. адекватно воспринимать инструкции.
- чтение (Ч) – осознанное самостоятельное чтение языка программирования.
- говорение (Г) – умение участвовать в диалоге, отвечать на заданные вопросы, создавать монолог, высказывать свои впечатления.
- пропедевтика (П) – круг понятий для практического освоения детьми с целью ознакомления с первоначальными представлениями о робототехнике и программирование.
- творческая деятельность(Т)- конструирование, моделирование, проектирование.
В структуре изучаемой программы выделяются следующие основные разделы - «Конструирование» и «Программирование».
Курс носит сугубо практический характер, поэтому центральное место в программе занимают практические умения и навыки конструирования и работы на компьютере.
Изучение каждой темы предполагает выполнение небольших проектных заданий, реализуемых с помощью изучаемых технологий.
Программа предусматривает проведение занятий во внеурочной деятельности с нетрадиционными формами обучения (игровые упражнения, творческие упражнения, создание проектов).
Форма промежуточной аттестации – обобщающий урок рефлексии и защита проектов.
Основные методы обучения , применяемые в прохождении программы в начальной школе:
Образовательная робототехника — современный подход к организации детского технического творчества. Робототехника вошла в мир в 60-е годы как одно из передовых направлений машиностроения. Ее фундаментом были механика и вычислительная техника, электроника и энергетика, измерительная техника, теория управления и многие другие, научные и технические дисциплины. В начале XXI века робототехника и мехатроника пронизывают все без исключения сферы экономики. Высокопрофессиональные специалисты, обладающие знаниями в этой области, необычайно востребованы. Готовить таких специалистов, с учетом постоянного роста объемов информации, необходимо со школьной скамьи.
Таким образом, для допрофессиональных ступеней образования востребовано и перспективно обучение, направленное на формирование и развитие конструкторских, исследовательских, технико-ориентированных компетенций обучаемых. При этом, одним из принципов построения методической системы допрофессиональной подготовки должен являться принцип преемственности при продвижении по этапам обучения.
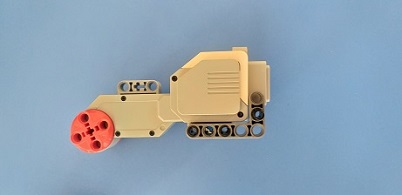
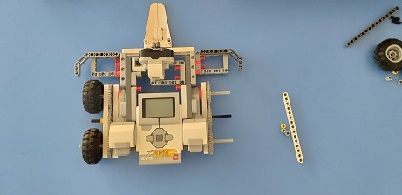
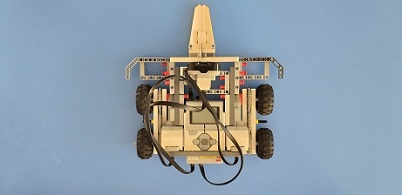
Приведена схема и инструкция по сборке полно приводного мощного робота lego ev3 для соревнований сумо.В соревновании сумо роботов lego робот должен вытолкнуть робота соперника за круг, при этом самому остаться в круге. Чтобы обнаруживать робота соперника необходим датчик расстояния, чтобы не вылететь за границу круга необходим датчик цвета. Робот Lego сумо должен иметь поддевающий или толкающий ковш и обладать хорошей мощностью. На основе опыта участия в соревнованиях лего сумо создана данная модель робота ev3 сумо, такая модель и ее модификации помогут вам успешно выступать в соревнованиях сумо роботов. Программа для сумо lego роботов

1
2

3

4
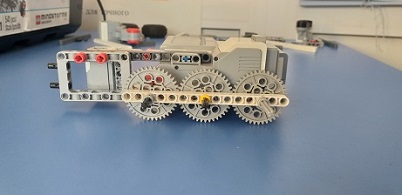
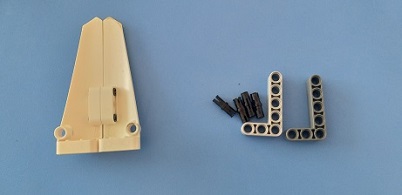
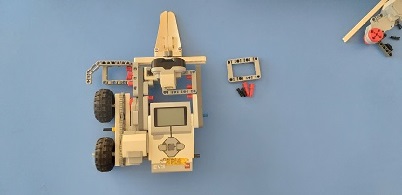
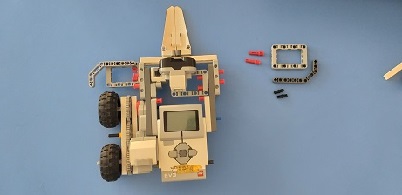
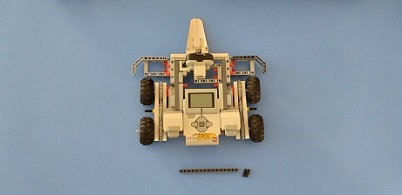
Полный привод собирается на 3 крупных шестеренках, которые сжимаются двумя длянными балками

5
6
7
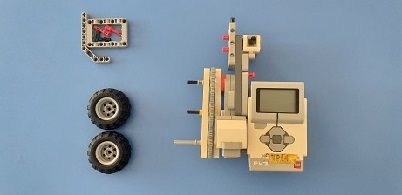
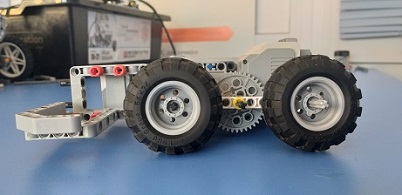
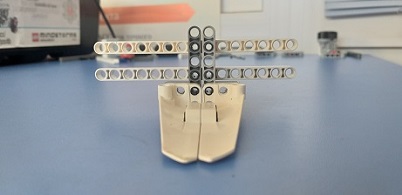
Крепим колеса к роботу лего сумо и прикрепляем прямоугольную рамку к боковой стороне вертикальной прямоугольной рамки

8
9
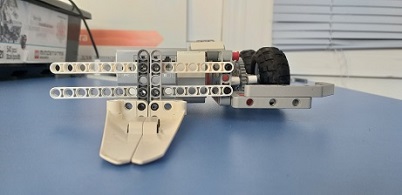
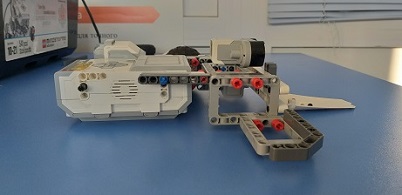
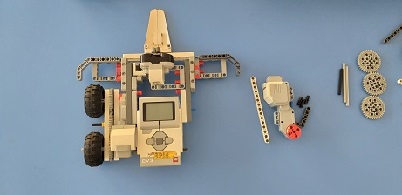
Сборка поддевающего ковша робота ev3 сумо

10
11

12
13
14
15
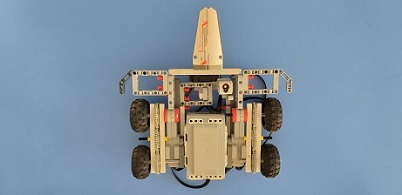
Собираем правую сторону робота ev3 сумо
16
17
18

19
20
21
22

23
24
25
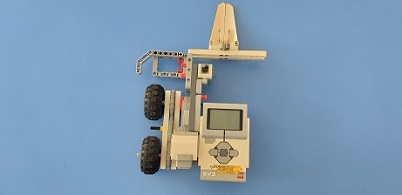
Подсоединяем проводами моторы к портам A и B датчик цвета к порту 3 датчик расстояния к порту 4
26
Для победы в боевых соревнованиях по робототехнике необходимо правильно собрать робота сумо ev3, инструкция по сборке поможет в этом. Результативность обеспечивается задействованием всех функциональных возможностей, включая датчики расстояния, цвета, толкающие и поддевающие ковши. Роботы-участники представлены в базовых и усовершенствованных комплектациях (шагающие, гусеничные боты).

Необходимые детали для робота-сумо ev3
Модели для сумо состоят из следующих блоков и элементов:
- 3 большие шестеренки, скрепленные парой балок для полного привода;
- колеса;
- прямоугольная рамка для размещения боковой платформы;
- поддевающий и распорный ковши;
- моторы;
- датчики и портальные разъемы;
- конструкционные элементы (поперечины, крепеж, направляющие, продольные, диагональные рейки).
Датчики и моторы
Для робота предусмотрено два больших двигателя, подсоединяемые к портам «В» и «С». Движущая конструкция расположена во фронтальной части, моторы вращаются по часовой стрелке.
Полноценное функционирование ev3 невозможно без датчиков. У рассматриваемого конструктора применяется пять основных видов индикаторов:
- Инфракрасный маяк служит для передачи сигналов роботу. Он агрегирует с другими лего-ботами.
- Температурный датчик работает по принципу органов чувств человека и других живых организмов.
- Ультразвуковой индикатор реагирует на соперника, что важно на соревнованиях любого уровня.
- Индикатор цвета расширяет возможности робота, ориентируя его на ринге.
- Датчик касания — самый простой и важный элемент.

Одно состязание робо-сумо состоит из 3-х раундов, общая продолжительность которых составляет 3 минуты.
Программный блок
Стандартное ПО рассчитано на два больших мотора, два датчика (инфракрасный и цветовой). Работает программа по следующей схеме:
- «Ожидание» – 5 секунд.
- «Звуковой сигнал» – начало работы.
- Два цикла «Начало» и «Неограниченный» – старт движения.
- «Определение цвета» – по умолчанию робот видит черный колер; при этом механизм отъезжает на два вращения назад.
- «Управление рулевое» – корректируется количество оборотов.
- Режим «Нет цвета» – ведется расчет имеющихся препятствий, расстояния до них и последующих манипуляций.
- «Инфракрасный индикатор» – действует по принципу распознавания и приближения объектов.
- «Истина» – ветка, которая активируется, если до препятствия менее 60 единиц.
- «Лож» – противоположность восьмой позиции в списке.
- «Независимое управление» – на противоположных мощностях двигателей бот будет вертеться на месте, пока дистанция до соперника не станет менее 60 единиц.
Выставив указанные параметры, проводят тестирование робота ev3 для сумо.
Моторы большой и средний
Основной двигатель серверного типа сделан под NXT с увеличенной корпусной частью. Характеристики:
- оборотистость предельная (об./мин.) — 170;
- заданный/рабочий момент кручения (Н/см) — 40/20;
- индикатор поворотного угла – есть, погрешность – до одного градуса.
Средний сервомотор «ев3» базируется на Power Function, ориентирован на высокие скорости и низкие нагрузки. Параметры:
- максимум оборотов (об./мин.) — 250;
- крутящий момент (Н/см) — 12/8;
- энкодер, отвечающий за угол поворота с точностью до одного градуса.
Новый блок для соревнований настроен универсально, подходит для всех модификаций рассматриваемых конструкций.

Удаленный инфракрасный маяк
ИК-маяк может определять дистанцию до соперника, посылая сведения о примерном своем расположении и удаленности. Для использования функции потребуются батарейки типа «ААА».
Датчик цвета и прикосновения
Цветовой индикатор «сумоиста» отличает семь оттенков с возможностью определения отсутствия колера. Дополнительная функция – работа в режиме подсветки.
- улавливание красного и его окружающего фона;
- контроль разницы между контрастными оттенками;
- рабочая частота – 1 кГц.
Датчик касания фиксирует активацию или отпускание кнопки, подсчитывает число нажатий.
Инфракрасный сенсор
Этот индикатор позволяет определять не только оттенок, но и степень освещенности, дистанцию до ближайших предметов. В качестве контроллера выступает специальный блок, к которому подсоединяются сопутствующие «движки» и датчики.

Роботы-сумоисты могут иметь различную конфигурацию, однако, они должны соответствовать регламенту соревнований — находиться в пределах назначенного размера и веса.
Пошаговая инструкция по сборке
Собрать мощного робота-сумоиста Lego не сложно, если знать все операции по этапам.
Боевой бот Mindstorms ev3 конструируется следующим образом:
- Собирается передний привод с тремя большими шестернями и обжимной парой длинных балок.
- Крепятся колеса, горизонтальная и вертикальная прямоугольная рамка.
- Цепляется поддевающий ковш.
- Комплектуется вся правая сторона боевого робота для сумо.
- Подсоединяются датчики к моторам посредством проводов и специальных портальных гнезд.
Бота собирают в нескольких базовых исполнениях. Таблица ориентирует пользователей на выбор модели, подходящей для заданных целей, по сравнению с категорией Education.
| Характеристика | NXT | EV3 |
| Основной процессор | ARM AT91-SAM 7S256, Atmel. 48 МГц, «Флеш-память» – 256 кБ, RAM – 64 кБ | ARM9, 300 МГц, Память – 16/64 кБ |
| Вспомогательное ПО | «Восьмибитный» «Амтел», 8 МГц, «Флеш»/«РАМ» – 4,0/0,52 кБ | Не предусмотрено |
| Операционная система | Propietary | Linux |
| Ввод | Четыре гнезда с цифровыми и аналоговыми портами. Скорость – 9600 бит/с | Аналоговые и цифровые разъемы со скоростью 460,8 Кбит/с |
| Вывод | 3 | 4 |
| Передача сведений | Full speed 12 Мбит/с | High speed 480 Мбит/с |
| Способ подключения | Отсутствует | Wi-Fi, Flash (до трех носителей и передатчиков) |
| Чтение карт SD | Нет | miniSD до 32 Гб |
| Совместимость с мобильными девайсами | «Андроид» | «Андроид», iOS |
| Монитор | Монохромный LCD (100×64 Px) | LCD (178×128 Px) |
| Взаимодействие | Bluetooth, USB | Bluetooth 2.1, USB 2.0/1.1, Wi-Fi |
Коротко о программировании сумо-робота
Регламент состязаний предполагает расположение «бойцов» во внутреннем секторе круга. Диаметр арены составляет 1540 мм, черная приграничная окантовка имеет ширину 50 мм. В середине круга предусмотрены две стартовые линии. На них соревнующиеся машины должны выждать 5 секунд до того, как броситься в схватку. В связи с этим секундомер пуска настраивается с соответствующей задержкой.
«Фишка» подобных соревнований заключается в том, что программировать робота «на успех» не получится. Направление движения определяет судья. Во избежание попадания бота в «молоко» используется программа «Цикл» с независимым управлением.
Настройка предполагает создание для мотора «А» предельной скорости перемещения вперед. Соответственно, мотор «В» на гусеницах альтернативно вращается назад. Независимое управление позволяет вращаться конструкции в пределах одной оси.
Пользователь корректирует робота, вращая его на одной точке. В этом помогает инфракрасный датчик, определяющий цель. Используют опцию «Приближение», настроив дистанцию 0,5 м. Рабочий диаметр для сражения ботов составляет по диагонали 1,5 м.
В соответствии с правилами предельное расстояние между соперниками не превышает 1000 мм. Колесо каждого участника не должно заступать за стартовую линию. Уловив цель, индикатор передает сведения на микропроцессор. Включается независимое управление, робот начинает перемещаться вперед и в стороны.
Для того чтобы лего-боец сумо смог уловить направление движения и стратегию ведения борьбы, включается датчик цвета. С его помощью бот доходит до черной черты с последующим включением задней передачи. Если на протяжении одной секунды ситуация остается без изменений, «сумоист» останавливается автоматически.
После настройки всех портов с моторами и датчиками, программа представит собой схему, в которой задействованы два двигателя, индикаторы света и инфракрасного излучения на движение.
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
Программирование, подготовка и комплектация борца-робота «СУМО» на базе конструктора Mindstorms LEGO EV 3.
Мы живем в веке информационных технологий, поэтому робототехника становится неотъемлемой частью учебного процесса. И если в рамках стандартной школьной программы мы изучаем теоретические основы программирования, то с помощью лего-роботов мы можем наглядно показать как выполняются те или иные функции.
Робототехника поощряет детей мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения.
Робототехника в школе приучает детей смотреть на проблемы шире и решать их в комплексе. Созданная модель всегда находит аналог в реальном мире. Задачи, которые ученики ставят роботу, предельно конкретны, но в процессе создания машины обнаруживаются ранее непредсказуемые свойства аппарата или открываются новые возможности его использования. Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
В данной статье, мы рассмотрим программирование, подготовку и комплектацию борца-робота «СУМО». По данному направлению в любом регионе России и в мире в целом постоянно проводятся всевозможные мероприятия.
Цель: Научить учащихся к самостоятельному программированию робота сумоиста, с применением датчиков: 2 датчика цвета, ультразвукового датчика и датчика касания для дальнейшего участия в соревнованиях борцов-роботов «СУМО».
Задача работы: Познакомить учащихся со способом программирования робота сумо.
Новизна: По новым требованиям ФГОС нового поколения введены новые направления в дополнительном образовании. Направление «Робототехника» представляет собой конструирование и программирование робота, т.е. развивает малую моторику, технические навыки у учащихся, а также укрепляет межпредметную связь.
Данная работа представляет собой инструкцию программирования робота с пояснениями.
· Роботы устанавливаются в центре круга (на линии старта) в любом направлении (кроме как внутрь круга)
· После включения программы робот ожидает 3 секунды и начинает выполнять программу
· Робот должен доехать до края площадки (белая или черная линия)
· Коснувшись линии робот приступает к поиску соперника
· В соревнованиях побеждает тот, кто выталкивает робота соперника за черный круг.
Конструкция данного робота будет наглядно приведена (изображения) в приложении к данной работе.

Рис. 1 Программа СУМО робота
По регламенту соревнования роботы должны находиться внутри круга с диаметром 122 см с черной или белой границей в 4 см, в середине круга расположены две линии старта, после сигнала они должны стоять на линии в течение 3 секунд, только потом начинать движения, поэтому необходимо использовать оператор времени, настроив его на время.

Рис. 2
Далее робот движется до белой или черной линии (границы круга)

Рис. 3
Коснувшись линии, робот приступает к поиску соперника. То есть начинаем кружиться вокруг. Это можно сделать с помощью блока независимого управления моторами, который так же будет действовать в цикле с постусловием. Но здесь мы будем использовать показания другого датчика в качестве условия. Ультразвуковой датчик отправляет ультразвуковой сигнал и замеряет скорость, за какой промежуток времени сигнал приходит обратно. Таким образом этот датчик в состоянии определить расстояние до объекта. Поскольку наше поле диаметром 122 см, наш робот продолжит выполнять программу после того, как обнаружит объект на расстоянии меньшем или равном 90 см.

Рис. 4
Далее, как только датчик расстояния заметит перед собой цель, программа переключается на независимое управление моторами, движением вперед моторамиA и B. Для этого просто включим оператор управления с независимыми моторами, присоединённых к порту A и B, на движение вперед. Тем самым обеспечив роботу движение вперед. Но не стоит забывать, что робот соперника, может совершить маневр, и мы проедем мимо него. Или попытавшись вытолкнуть соперника, наш робот сам может покинуть пределы площадки. Чтобы избежать этого нам помогут датчики цвета. В нашем роботе используется 2 датчика. Так как на практике столкнулись с ситуацией. Когда датчик, расположенный с одной стороны просто не успевает среагировать, когда робота выталкивают с площадки другой стороной. И это будет одной из самых сложных частей программы, так как для считывания информации параллельно с обоих датчиков, придется использовать логическую операцию и работу датчиков цвета разбирать во вложенном цикле. Потребуется логическая операция ИЛИ, известная каждому школьнику, и значение истинности одного из условий. После того, как один из датчиков цвета обнаружил линию черного или белого цвета ему необходимо отъехать назад от края площадки и вновь приступить к поиску противника.


Для того, чтобы нашего робота было не так просто вытолкнуть за пределы поля, если он не успел развернуться и увидеть робота, или если проехал мимо и оказался в невыгодном положении, когда робот соперника находится сзади и уже выталкивает с поля, мы используем датчик касания. Его работа будет выполняться в параллельном цикле, который начнет свое действие только тогда, когда будет произведено нажатие. И остановит выполнение основного цикла. После нажатия датчика робот совершит маневр разворота с радиусом, чтобы избежать своего соперника, при этом учитывая данные показаний датчиков цвета, чтобы не покинуть пределы площадки.

После чего мы начинаем выполнение основной программы. Таким образом получается следующее:
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Пахомов Максим Семенович, учитель математики и информатики
МБОУ « АМ Саха-Бельгийская гимназия », с.Ке птени , Усть-Алданский райо н , Республики Саха(Якутия)
Программирование робота «Сумо» конструктора LEGO на базе MINDSTORMSEV 3
Робототехника быстро становится неотъемлемой частью учебного процесса, потому что она легко вписывается в школьную программу обучения по техническим предметам. Ключевые опыты в физике и математике можно наглядно показать с помощью лего роботов.
Робототехника поощряет детей мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения без потери уважения среди сверстников.
Робототехника в школе приучает детей смотреть на проблемы шире и решать их в комплексе. Созданная модель всегда находит аналог в реальном мире. Задачи, которые ученики ставят роботу, предельно конкретны, но в процессе создания машины обнаруживаются ранее непредсказуемые свойства аппарата или открываются новые возможности его использования. Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
В частности мы рассмотрим программу, составленную для соревнования лего робота к категории «Сумо».
Цель: Научить учащихся к самостоятельному программированию робота сумоиста, с минимальным применением датчиков: датчика света и инфракрасного датчика для дальнейшего участия в конкурсе «Робото-Сумо».
Задача работы: Ознакомить учащихся с самым простым способом программирования робота сумо.
Новизна: По новым требованиям ФГОС нового поколения введены новые направления в дополнительном образовании. Направление «Робототехника» представляет собой конструирование и программирование робота, т.е. развивает малую моторику, технические навыки у учащихся, а также укрепляет межпредметную связь.
Данная работа представляет собой краткую инструкцию программирования робота. В соревнованиях побеждает тот, кто выталкивает робота соперника за черный круг. Конструирование данного робота ссылается на сборку стандартного гусеничного робота по инструкции LEGOMINDSTORMSEV 3 с дополнительным применением датчика света, для определения границы поля, и инфракрасного датчика, для определения цели и направления движения.
 |
По регламенту соревнования роботы должны находиться внутри круга с диаметром 100 см с черной границей в 2 см, в середине круга расположены две линии старта, после сигнала они должны стоять на линии в течение 5 секунд, только потом начинать движения, поэтому необходимо использовать оператор времени, настроив его на время.
Неопределенность этого соревнования заключается в том, что направления робота определяется судьей.
 |
Во избежание того, что робот пройдет мимо (в случае, когда используется прямое движение) используем оператор «цикл» с использованием независимое управления моторами для поворота на месте.
Настроим его так, чтобы двигатель A двигался c максимальной скоростью вперед, а двигатель B c максимальной скоростью назад. Тем самым независимое управление моторами даст роботу поворачиваться на одной оси.
Во избежание того, что робот будет стоять и кружиться на одном месте в операторе цикл используем инфракрасный датчик для определения цели, настроив егок порту 1 на «Приближение» меньше или равно 50 см, так как роботы будут стоять в центре круга с диаметром 1м.
 |
Таким образом, максимальная расстояние между нами не будет превышать 100 см, так как линия старта будет в середине поля, то расстояние между роботами будет меньше 50 см.
 |
Далее, как только датчик расстояния заметит перед собой цель, программа переключается на независимое управление моторами, движением вперед моторами A и B . Для этого просто включим оператор управления с независимыми моторами присоединённых к порту A и B , на движение вперед. Тем самым обеспечив роботу движение вперед.
 |
Прямое движение робота рано или поздно приведет его к черной линии, во избежание выхода из границы (поля сражения) используем датчик цвета. Настроим датчик для определения черного цвета к порту 2.
 |
Для этого настраиваем его на определение черного цвета, как только датчик дойдет до черной линии включается мотор с движением назад (настроим независимые двигатели движения назад в течение 1 секунды) и автоматически останавливается.
 |
После того как настроим все порты к моторам и к датчикам наша программа для соревнования сумо-роботов целиком будет иметь следующий вид с применением 2 моторов и датчика света с инфракрасным датчиком
Список использованной литературы:
1. Инструкция по сборке робота TRACK 3 R 01 Прицельное измельщение С.1-17.
Читайте также: