
Защита проекта по робототехнике lego ev3
Обновлено: 19.04.2024
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Обращаем Ваше внимание, что c 1 сентября 2022 года вступают в силу новые федеральные государственные стандарты (ФГОС) начального общего образования (НОО) №286 и основного общего образования (ООО) №287. Теперь требования к преподаванию каждого предмета сформулированы предельно четко: прописано, каких конкретных результатов должны достичь ученики. Упор делается на практические навыки и их применение в жизни.
Мы подготовили 2 курса по обновлённым ФГОС, которые помогут Вам разобраться во всех тонкостях и успешно применять их в работе. Только до 30 июня Вы можете пройти дистанционное обучение со скидкой 40% и получить удостоверение.
Столичный центр образовательных технологий г. Москва
Получите квалификацию учитель математики за 2 месяца
от 3 170 руб. 1900 руб.
Количество часов 300 ч. / 600 ч.
Успеть записаться со скидкой
Форма обучения дистанционная
« Использование датчика цвета Lego Mindstorms EV 3 для решения задач компьютерного зрения »
Даже простой ученический набор Lego Mindstorms EV 3 позволяет сконструировать и запрограммировать робота, который может «видеть» объекты. Точнее, робот может измерить расстояние до ближайшего объекта по ходу движения. Этого достаточно, чтобы заставить робота «искать» себе подобных (например, в соревнованиях «Робосуммо»), или следовать за объектом на заданном расстоянии и т.п.
Но этого «умения» катастрофически недостаточно для идентификации объекта! Как заставить робота распознать объекты перед ним? Как отличить кубик от шарика? Как понять какое число написано перед ним? Ведь в наборе Lego Mindstorms EV 3 присутствуют только датчик цвета (позволяющий оценить яркость освещения, яркость отраженного света или определять один из семи предустановленных цветов) и ультразвуковой датчик (позволяет измерять расстояние до объекта перед датчиком).
Мы же в своей работе, на основе только этих датчиков, попытались создать робота, который «видит» арифметическое выражение, составленное из кубиков, способен различить цифры и знаки арифметических операций и может проверить правильность ответа в арифметическом приложении.
Цель работы: создание робота из набора Lego Mindstorms EV 3, способного распознавать арифметические выражения на игральных кубиках и проверять их правильность
Сегодня уже практически в каждой школе преподается курс «Робототехники» на основе наборов Lego Mindstorms EV 3. Наши школьные роботы совсем как дети – они развиваются вместе с нами: первое, что мы учимся с ними делать – это передвигаться в пространстве («ползать» и «ходить»): сначала хаотично, затем осмысленно (езда по черной линии, распознавание препятствий на пути следования). Затем возникают все более сложные задачи, которые требуют уже умения не только управляться с моторами, но и задействовать ряд датчиков из набора. Также и с детьми: с взрослением приходит понимание происходящих вокруг процессов и понимание того, как можно управлять и взаимодействовать с окружающим миром.
Еще с детства, всем хорошо известна детская игра кубики, когда на каждой грани кубика нарисована одна из букв русского алфавита, и поворачивая и комбинируя различные грани можно составлять различные слова. Психологи рекомендуют начинать заниматься с такими кубиками малышам с трёх лет. Такие кубики как правило достаточно красочные и кроме самих букв содержат иллюстрации. После того, как буквы изучены, любой малыш учится считать, приходит первое знакомство с цифрами и простейшими арифметическими операциями.
Наши роботы (вместе с «робототехниками») уже «доросли» до того возраста, когда пора учиться считать и читать. И здесь на первый план выходят задачи компьютерного зрения. Компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений. Видеоданные могут быть представлены множеством форм, таких как видеопоследовательность, изображения с различных камер или трехмерными данными.
Вопросы обработки видеоданных с помощью наборов Lego Mindstorms EV 3 являются скорее прикладными, потому что в набор не входит видеокамера и в программном обеспечении отсутствуют команды, способные работать с видеоданными. Хотя «зачатки» таких команд имеются: с помощью стандартного программного обеспечения возможно выводить информацию (и не только в текстовом виде) на монохромный дисплей микрокомпьютера Lego Mindstorms EV 3 с разрешением 178 на 128 пикселей. Но это скорее умение «писать», чем «читать».
Справедливости ради, стоит отметить, что с конца 2015 года за отдельную плату предлагается видеокамера Pixy LEGO (CMUcam5). Она подключается напрямую к контроллеру Lego Mindstorms NXT или EV3 с помощью прилагаемого кабеля и интегрируется в программную среду Lego. Камера позволяет снимать с разрешением 640*400 пикселей и частотой 50 кадров в секунду. Pixy выполняет обработку изображения на своем борту, освобождая мощности микроконтроллера для других задач. Для обнаружения объектов Pixy использует алгоритм фильтрации, основанный на цветах. Большинство из нас знакомы с цветовой моделью RGB (красный, зеленый и синий), Pixy вычисляет цвет (оттенок) и насыщенность каждого пикселя изображения и использует в качестве параметров первичной фильтрации. Pixy помнит до 7 подписей разных цветов, если вам нужно больше, вы можете использовать коды цвета.
Но цена самого дешевого варианта такой камеры (посылкой из Китая) начинается от 5000 рублей (а это почти 25% всего набора) – дорогое удовольствие.
Ввиду отсутствия средств на закупку камер, мы решили обучать «чтению» наших роботов с самых основ – а именно, научить их сначала определять цифры. Но даже эта тривиальная задача оказывается достаточно сложной при детальном рассмотрении. Посудите сами: в наборе Lego Mindstorms EV 3 из датчиков, хоть как-то способных помочь нам в решении нашей задачи, присутствуют только датчик цвета (позволяющий оценить яркость освещения, яркость отраженного света или определять один из семи предустановленных цветов) и ультразвуковой датчик (позволяет измерять расстояние до объекта перед датчиком).
Проанализировав литературу по кодированию и передачи информации было найдено гениальное в своей простоте решение: если в наборе есть датчик, который позволяет распознать цвета, необходимо каждую цифру или букву представить цветовым кодом. Таким образом, наш робот Lego Mindstorms EV 3 будет способен воспринимать гораздо больший объем информации об окружающем мире.
Итак, задача: создать робота из стандартного набора Lego Mindstorms EV 3, способного распознавать арифметические выражения на игральных кубиках и проверять правильность этих арифметических выражений.
Для набора, были построены 6-гранные игральные кубики, которые можно встретить в любом магазине игрушек: на каждой грани кубика расположена цифра (от нуля до десяти) или знак простейшей арифметической операции (сложение, вычитание, деление).
Для упрощения длины программного кода были наложены искусственные ограничения: работа только с двузначными положительными целыми числами (от 0 до 99 включительно), только целочисленное деление. Последнее ограничение введено из-за особенностей работы с различными типами данных. Кроме этого, был введен дополнительный символ «точка» для определения конца арифметического выражения.
Все цифры и арифметические выражения на кубиках были закодированы равномерным двоичным кодом с длинною равной четырём. Как всем известно из курса информатики, количество различных значений для равномерного кода такой длины составляет 2 4 =16. Этого количества нам будет достаточно для кодирования 10 цифр, 5 знаков арифметических операций (сложение, вычитание, равенство, умножение, деление (данная операция будет реализована в перспективе)) и одного специального символа окончания строки (точка).
Проект собран из набора для робототехники LegoMindstorms NXT 2.0 и EV3.
Вспомогательный двигатель используется для управления косилкой и другим навесным оборудованием. Программа для управления роботом написана на языке программирования NXT-G. Управление роботом-косильщиком в дистанционном режиме происходит по каналу Bluetooth через приложение для системы Android.
- системный блок
- подвеска (3 двигателя,4 колеса)
- навесное оборудование
Процесс работы. Оператор робота будет следить за передвижением робота с помощью специальных камер, которые будут установлены на роботе и системы Глонасс. На косилку будет установлен тепловизор, ультразвуковой датчик и динамик, чтобы отпугивать животных и предупреждать людей. Эти системы необходимы для того, что не позволить роботу задавить кого-нибудь или нанести вред другой технике и постройкам.
Помимо основного применения, косилка может измельчать большой мусор (сухие стволы, кусты и ветки).
Робот-перевозчик из Lego
Проект из набора для робототехники LegoMindstorms NXT 2.0 или EV3.
Робот-превозчик собран на гусеничной базе. Вспомогательный двигатель используется для управления косилкой и другим навесным оборудованием. Программа для управления роботом написана на языке программирования NXT-G. Управление роботом в дистанционном режиме происходит по каналу Bluetooth через приложение для системы Android.
Компоновка робота
- системный блок
- подвеска (2 двигателя, 2 гусеницы)
- навесное оборудование
Процесс работы. Оператор робота будет следить за передвижением робота с помощью специальных камер, которые будут установлены на роботе и системы Глонасс. На роботе будет установлен ультразвуковой датчик и динамик, чтобы отпугивать животных и предупреждать людей. Эти системы необходимы для того, что не позволить роботу задавить кого-нибудь или нанести вред другой технике и постройкам.
Робот трактор-перевозчик предназначен для перемещения (погрузки) любых деталей, это может быть как стог сена, так и любое техническое оборудование.
Заключение
Наша робо-сельскохозяйственная техника является передовой и перспективной сельскохозяйственной техникой будущего.
Для того чтобы реализовать этот проект нужно затратить много средств и ресурсов. Этот минус частично компенсируется тем, что один робот может выполнять функции нескольких сельскохозяйственных машин.
Необходимо обучить человека для того, чтобы управлять роботом. Получается, нужен человек с хорошим образованием, и надо открывать новые кафедры в высших учебных заведениях Мордовии, чтобы люди могли обучаться и идти работать операторами робота.
С помощью таких роботов наш район сможет покрыть свои потребности в технике, рабочей силе.
А стоит ли вообще тогда заниматься изучением и развитием роботостроения?
Однозначно — да, ведь робот это незаменимый инструмент помогающий ускорить и автоматизировать многие сложные, и рутинные процессы в жизни человека.
Роботы глубоко и прочно входят в нашу жизнь. На данном этапе их помощь просто неоценима.
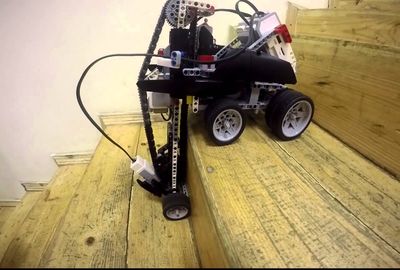
Индивидуальный исследовательский проект по робототехнике "Ступенькоход" содержит доступное описание проведенной учащимся работы по созданию модели робота–ступенькохода, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
Подробнее о проекте:
Творческая работа учащегося 11 класса о создании робота-помощника для колясочников подымает важный социальный вопрос о достижении независимости и самостоятельности людей с ОВЗ в сфере самообслуживания. По мнению автора проекта, для этого необходимо приспособить жилища и общественные здания к особенностям и специфическим потребностям инвалидов, то есть спроектировать устройство для беспрепятственного доступа инвалидов в любое помещение.
Готовая творческая работа по робототехнике на тему "Ступенькоход" демонстрирует этапы работы автора над сборкой робота-ступенькохода, используя конструктор Lego Mindstorms EV3. Изучив программное обеспечение данной версии конструктора, автор собрал запланированную модель и запрограммировал ее на передвижение по прямой и по лестничным маршам.
Оглавление
Введение
1. Изготовление робота-ступенькохода.
Выводы и практические рекомендации
Заключение
Список литературы
Приложения
Введение
В настоящие время перед современным обществом стоит непростая задача кардинального изменения отношения к людям с ограниченными возможностями здоровья путем создания им условий для самореализации, равных возможностей; разработки и внедрения различных способов и мер, позволяющих им полноценно осваивать социальный опыт, существующую систему общественных отношений.
Для этого необходимо создать систему эффективной социальной поддержки, включающей социальные, медицинские, педагогические, психологические разделы их реабилитации, позволяющих равноправно инвалидам входить в общество здоровых людей. Статус инвалида характеризуется социальной изоляцией, ограничением практически всех видов его жизнедеятельности. Преодоление социально-психологической дезадаптации инвалидов предполагает, прежде всего, изменение отношения общества к этой категории.
Актуальность. В настоящее время актуальной является проблема организации социальной поддержки людей с ограниченными возможностями. Участие в различных видах досуговой деятельности является необходимой областью социализации, самоутверждения и самореализации инвалидов, но ограничено, в связи с недостаточным уровнем развитости и доступности.
Часть инвалидов ограниченны в передвижении (маломобильны) и их миром являются стены квартиры. Много мероприятий, проводимых в районе на сегодняшний день, не предусматривают участия в них данной социальной группы.
Цель проекта: создать модель робот – ступенькоход, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
- сконструировать модель робота, выполняющего функции подъемника;
- создать программу для робота, которая позволила бы ему двигаться по лестничным пролетам, перемещая людей с ОВЗ;
- Обеспечить доступ к жилому зданию и возможность перемещения внутри. Обеспечить безопасные лестницы для всех пользователей, в том числе и для людей пожилого возраста, детей, людей со сниженным зрением и проблемами моторно-двигательной сферы.
Субъект проекта: помощь людям с ограниченными возможностями при перемещении по лестничным пролетам в заданиях, не оборудованных лифтом.
Объект проекта: «Робот – ступенькоход».
Гипотеза: робототехника позволяет создавать роботов-помощников для социализации людей с ОВЗ.
- в ходе выполнения проекта будут созданы:
- модель «робот-ступенькоход»;
- программа, которая обеспечит работу робота;
- презентация проекта.
Методы реализации проекта:
- Объяснительно-иллюстративный – предъявление информации различными способами (объяснение, рассказ, беседа, инструктаж, демонстрация, работа с литературой и др);
- Эвристический – метод творческой деятельности (создание творческой модели);
- Проблемный – постановка проблемы и самостоятельный поиск её решения;
- Программированный – набор операций, которые необходимо выполнить в ходе выполнения практических работ (компьютерный практикум);
- Частично-поисковый – решение проблемных задач с помощью педагога;
- Поисковый – самостоятельное решение проблем.
Материальные ресурсы: конструктор с программным обеспечением Lego Mindstorms EV 3 – 1 основной набор+ 1 набор дополнительный.
Создание робота-ступенькохода
Для достижения независимости и самостоятельности людей с ОВЗ в сфере самообслуживания необходимо приспособление жилищ и общественных зданий к особенностям и специфическим потребностям инвалидов, устройство для беспрепятственного доступа инвалидов в любое помещение.
Это пандусы при входе в здание, определенные типы, размеры и конструкции дверей и тамбуров, лифты и подъемники для инвалидов на кресло-колясках, дополнительные ограждения лестничных проемов, приспособления, облегчающее инвалидам самообслуживание в раздевальных, душевых и уборных помещениях. Данные мероприятия играют немаловажную роль, но здесь встает вопрос о том, как быть людям маломобильной группы внутри самого здания, если ему необходимо подняться на 2 или выше этажи и попасть к специалистам.
Чтобы ответить на этот вопрос, обратился в центр социального развития, где получил ответ:
- «Все социально-значимые учреждения оборудованы пандусами и кнопкой «Вызов специалиста».
Но подтвердилась проблема, которая возникает внутри здания-отсутствие лифта в социально - значимых учреждениях.
В помощь, людям, ограниченным в передвижении, мы решили изобрести робот-ступенькоход.
На подготовительном этапе инициативная группа изучила материал в Интернет - сети, о том, какие существуют приспособления для передвижения людей инвалидов. Выяснили, что существуют разные виды ступенькоходов.
Занимаясь в творческом объединении «Рободем» с конструктором Lego Mindstorms EV3, изучил программное обеспечение к данной версии конструктора. Программа состоит из различных групп программных блоков. Блоки выстраиваются последовательно, при необходимости заключаются в цикл. Программа загружается через USB шнур.
Из деталей конструктора собрал ходовую часть робота, установил аккумулятор, большие и средние моторы, датчик касания, гироскопический датчик, отвечающий за равновесие робота. Большой мотор осуществляет движение робота, что позволяет данной модели передвигаться не только по лестничным маршам, но и по ровной поверхности. Средний мотор отвечает за гусеничный ход, позволяющий перемещать заднюю часть робота в нужном направлении.
На этапе конструирования столкнулся с проблемой выбора диаметра колес для передвижения по ступеням (ведущие колеса передней части робота должны быть более мощными для устойчивого положения во время передвижения по ступенькам).
На следующем этапе (программировании) разработал программу, приводящую ступенькоход в движение с учетом встроенных датчиков.
Выводы и практические рекомендации
Мы задались вопросом:
- доволен ли результатами своей работы?
- нравится ли получившееся изделие?
- получит ли оно дальнейшее применение?
По результатам тестирования модели остался доволен выполненной работой, но пришел к выводу, что необходимо разработать механическую систему блокировки движения устройства на краю ступенек. Устройство решает серьезную задачу – обеспечивает безопасный и комфортный спуск-подъем по лестнице инвалида-колясочника там, где отсутствуют другие возможности, такие как лифт, пандус или стационарный подъемник.
Цель проекта достигнута, задачи в ходе работы выполнены полностью
Заключение
Мне кажется, что полученные навыки по робототехнике обязательно пригодятся в жизни. Можно не только изобретать роботов из готовых наборов, но и использовать подручные материалы для создания действующих моделей.
Надеюсь, что модель заинтересует инженеров, которые смогут реализовать мою идею в жизнь в промышленных масштабах. Такой робот станет незаменимым помощником людям с ограниченными возможностями здоровья, ведь качество жизни инвалидов показывает уровень развития и осознанности общества в целом. Поэтому создание безбарьерной среды заявлено как одно из приоритетных направлений в государственной политике.
И в сознании все большего количества людей появляется понимание по отношению к людям «с расширенными потребностями».

Этот подраздел посвящен исследовательским работам по робототехнике учеников 1 и 2 класса начальной школы и старше, в которых дается теоретическое обоснование прикладной науки робототехники, осуществляется конструирование lego, а также рассматриваются преимущества введения данного предмета для детей дошкольного и младшего школьного возраста в качестве развития у них интереса в области моделирования и программирования.
Детские проекты по робототехнике в ДОУ (детском саду) и в 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 и 11 классах школы предполагают описание методов моделирования и конструирования роботов с применением конструкторов лего (lego ev3 и wedo). Дети в готовых исследовательских проектах описывают историю робототехники и LEGO, а многие дошкольники и учащиеся пошагово проектируют и собирают робота-помощника, манипулятора, робота-сортировщика мусора, робота-пожарного и другие модели роботов.
Робот-подсолнечник из конструктора LEGO MINDSTORMS EV3

В ученической исследовательской работе по робототехнике "Робот-подсолнечник из конструктора LEGO MINDSTORMS EV3" автор изучает основы аутэкологии и действие абиогенных факторов на движения растений на примере подсолнечника, а также с помощью образовательного конструктора LEGO MINDSTORMS EV3 создает робота-подсолнечника.
Проект "Игра «Электронное пианино»"

Детская исследовательская работа по робототехнике "Игра «Электронное пианино»" была создана учащимся 6 класса школы с целью самостоятельно изготовить игрушку, которая бы выполняла функцию пианино.
Проект "Цветная атмосфера"

Предложенный учебный исследовательский проект по робототехнике "История возникновения языков программирования" рассматривает интересную информацию о цветотерапии и ее роли в современном обществе, а также предлагает разработку светодиодного светильника.
Проект «Луноход – Т»

В ученической исследовательской работе по робототехнике "Луноход – Т" автор утверждает, что уже в мифологии описывались существа, напоминающие современных роботов, а также подробно описывает процесс самостоятельной работы по проектированию робота-лунохода.
Робот-футболист

В учебном творческом проекте по робототехнике на тему "Робот-футболист" ученики 10 и 11 класса школы проводят практическую работу по проектированию и конструированию модели робота-футболиста с использованием конструктора LegoMindstorm.
Робот - эколог из Lego

В учебном творческом проекте по робототехнике на тему "Робот - эколог из Lego" ученики 3 и 4 класса школы представляют разработку и конструирования модели робота-эколога с использованием конструктора лего.
Световой будильник

В учебном творческом проекте по робототехнике на тему "Световой будильник" ученик 10 класса гимназии представляет разработку приложения и программы для работы светового будильника при помощи NodeMCU и Blynk IoT Platform.
Вторая жизнь сломанной машинки

В данном творческом проекте по робототехнике на тему "Вторая жизнь сломанной машинки" ученик 2 класса школы представляет разработку новых игрушек, которые можно создать, используя детали от поломанной машинки.
Сайт Обучонок содержит исследовательские работы и проекты учащихся, темы творческих проектов по предметам и правила их оформления, обучающие программы для детей.
Код баннера:
Исследовательские работы и проекты
Проект «Луноход – Т»

Готовая исследовательская работа по робототехнике "Луноход – Т" является результатом самостоятельной работы ученика 6 класса, целью которой было создать робота из конструктора LEGO Mindstorms для применения в космосе и в жизни человека.
Подробнее о работе:
Проект по созданию робота при помощи конструктора LegoMindstorm, выполняющего функции лунохода, актуален, потому что, по последним данным, сегодня в мире работают 1,5 млн. самых различных роботов. Бывают ситуации, когда применение робот безопасно для человека. Например, в космонавтике робототехника позволяет существенно помочь космонавтам при работах в открытом космосе.
Автором индивидуальной исследовательской работы по робототехнике на тему "Луноход – Т" была изучена история возникновения роботов и история развития робототехники, выяснены сведения о создании и применении роботов в космонавтике. В рамках практической части исследования школьник собрал подвижного робота «Луноход – Т» из конструктора Lego Mindstorms EV3 и составил программу для работы этого робота.
Оглавление
Введение
1. История и развитие роботов.
1.1 История возникновения термина «Что такое робот?».
1.2 Современный этап развития робототехники.
2. Космонавтика и робототехника.
2.1 Исследование Луны.
3. Конструирование и программирование.
3.1 Создание робота «Луноход – Т».
Заключение
Список литературы
Приложение
Роботы ассоциируются у большинства людей исключительно с новыми технологиями. Однако идее создавать машины подобные людям, уже сотни лет. Существа, напоминающие современных роботов, можно найти даже в мифологии и литературе. В наше время их придумывают и создают не только писатели и художники, но и инженеры-робототехники.
С появлением конструктора Lego Mindstorms, роботы пришли и в нашу школу. Для робототехники нет границ: она представляет для нас такие возможности учебного творчества, о которых многие даже не подозревают. Я решил исследовать возможности конструктора и создать робота для применение в космосе.
В работе изложен материалы о роботах и робототехнике, исследование Луны, применение данного робота в изучение поверхности Луны. Результаты работа могут быть полезны в космонавтике, так же данного робота «Лунохода - Т» можно использовать в жизни человека.
Проект состоит из введения, трех глав, заключения, списка литературы 4 приложений, изложен на 19 страницах, включая 4 рисунка, 2 фотографии. Список литературы включает 1 наименование, 2 электронных ресурса.
Введение
Роботы сегодня вошли в нашу жизнь в разных областях. Они летают в космос, исследуют другие планеты; помогают в военных целях — разминируют бомбы и разведывают обстановку с воздуха. В промышленности многие области уже немыслимы без роботов: они собирают автомобили, помогают находить новые лекарства. Многие устройства, принимающие решения на основе полученных от сенсоров данных, тоже можно считать роботами — таковы, например, лифты и системы антиблокировочного торможения в автомобилях, помогающие избежать аварий.
Актуальность темы: робототехника вошла в мир в 60-е годы 20 века как одно из направлений машиностроения. По последним данным, сегодня в мире работают 1,5 млн. самых различных роботов. Бывают ситуации когда применение робот безопасно для человека. Например, в космонавтике робототехника позволяет существенно помочь космонавтам при работах, в открытом космосе.
Вообще-то, то же самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать:
- перенести запуск
- работать в сложных условиях враждебной среды
- весить как можно меньше
- потреблять мало энергии и, иметь долгий срок службы
- работать в автоматическом режиме
- обладать чрезвычайной надежностью.
Основной целью моей работы является: создать робота из конструктора LEGO Mindstorms для применения в космосе и в жизни человека.
Для достижения цели поставлены следующие задачи:
- Познакомиться с историей возникновение роботов;
- Узнать историю развития робототехнике;
- Создание роботов в космонавтике;
- Собрать подвижного робота «Луноход – Т» из конструктора Lego Mindstorms EV3.
- Составит программу для работы робота «Луноход - Т»
- Сделать вывод.
Оборудование: компьютер с программной средой LEGOMINDSTORMS Education EV3, конструктор LEGO MINDSTORMS Education
История и развитие роботов
Что приходит на ум, когда мы слышим слово «робот»? В научной фантастике этот термин предполагает, что робот имеет человекоподобный вид или обладает возможностями человека, но в действительности современные роботы мало похожи на людей. Разновидностей роботов столько же, сколько существует для них видов работ. Для человекоподобных роботов используется специальный термин – андроид.
Первым промышленным роботом стал Unimate, выпущенный в 1961 году – это механическая рука, использовавшаяся корпорацией General Motors при производстве автомобилей. Робот выполнял последовательность действий, которая была записана на магнитный барабан (приложение 1).
Роботы успешно выполняют рутинные задания, они особенно удобны при выполнении многократно повторяющихся работ, сложных или опасных для людей. Сегодня в мире во всех сферах человеческой деятельности нашлось применение миллионам роботом. Они используются при управлении самолетами и поездами, спускаются на дно океана, работаю в космосе, собирают автомобили, охраняют здания, производят микрочипы, используются военными, помогают спасателям.
Робот – это автоматическое устройство для осуществления производственных и других операций по определенной программе. Действиями робота всегда управляет микропроцессор, который запрограммирован в соответствии с заданием. Робота всегда можно быстро перепрограммировать на выполнение нового задания.
- Автоматическая машина;
- Отвечает на внешние воздействия;
- Работает по программе.
У робота есть три важных характеристики:
- Мобильность (быстрая смена видов роботов);
- Универсальность (выполнение большого числа заданий);
- Автоматизм (После программирования работает автоматически).
Роботов используют в области робототехнике. Понятие «робототехника» принадлежит Айзеку Азимову. Робототехника (от робот и техника; англ. robotics) - прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Основные законы робототехники:
- Робот не может причинить вред человеку.
- Робот должен подчиняться командам человека.
- Робот должен заботиться о своей безопасности.
Современный этап развития робототехники
Развитие технологии электричества дало человечеству новый источник энергии, которым можно было питать устройства гораздо более продолжительное время. В то же время начинаются первые попытки заставить сложные механизмы работать на человека, заменяя его труд на производстве.
Уже в 1808 году французский ткач Жозеф Мари Жаккар изобрел ткацкий станок, программируемый с помощью перфокарт. Пока это был еще не робот – скорее, аналог современных автоматизированных линий. Но именно в нем впервые в промышленности был реализован принцип программирования, на котором держится современная робототехника.
В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио.
И все же считается, что человек, создавший первого действующего робота – американский инженер Рой Уэнсли. Разработанный им в 1928 году механизм под названием « Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д.
Еще одним претендентом на роль родоначальника роботов был Эрик, разработанный в том же 1928 году британским военным Уильямом Ричардсом. Механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
Первый прообраз промышленного робота появился еще в 1898 году – это был созданный американским инженером Бэббитом манипулятор, с помощью которого выхватывались заготовки из раскаленной печи.
В 1948 году в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе. Его особенностью было наличие обратной связи – оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно.
Сегодня роботы проникли практически во все сферы деятельности. Промышленность, научные исследования, энергетика, медицина, развлечения, военные действия и даже космос – современные автоматические или дистанционно контролируемые механизмы используются очень широко и даже постепенно вытесняют человеческий труд. Так наше общество незаметно для себя вошло в будущее.
Космонавтика и робототехника
В жизни всегда существует дата – отправная точка, после которой о событии, явлении или объекте узнает весь мир. В робототехнике тоже есть такая дата, это 17 ноября 1970 года. В этот день самоходный аппарата 8ЕЛ, более известный как «Луноход - 1», в составе автоматической станции Е8 № 203 впервые в истории успешно покорил лунную поверхность. Всего он проехал 10 540м и передал на Землю 211 лунных панорам и 2 тысяч фотографий. Общая масса первого лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи – 4,42 м, ширина – 2,15 м, высота – 1, 92м.
Но дата рождения лунохода можно считать 18 мая 1966 года, когда главный конструктор Машиностроительного завода имени С.А. Лавочкина Григорий Николаевич Бабакин подписал проект «Е8».
Космонавтика – это процесс исследования космического пространства с помощью автоматических космических аппаратов.
Отметим основные этапы космонавтики:
- 4 октября 1957 года было положено начало освоению космоса: совершен запуск Советским Союзом первого искусственного спутника Земли.
- 12 апреля 1961 года – день полета первого космонавта Юрия Алексеевича Гагарина – стал отправной точкой развития пилотируемой космонавтики.
- 18 марта 1965 г. — первый выход человека в открытый космос (СССР);
- 24 декабря 1968 г. — первый вывод пилотируемого корабля на орбиту спутника Земли (США);
- 20 июля 1969 г. — день первой высадки людей на Луне (США);
- 19 апреля 1971 г. — впервые запущена орбитальная станция (СССР);
- 17 июля 1975 г. — впервые произошла стыковка двух кораблей (советского и американского);
- 19 августа 1960 г.- «Спутник -5» вывел на орбиту живой груз – собак Белку и Стрелку, 40 мышей, двух крыс и ряд растений. Аппарат с выжившими животными успешно вернулся на землю.
Настоящее и будущее космонавтики характеризуется новыми проектами и планами. В проекте Международной пилотируемой космической станции активно сотрудничают уже 19 государств.
Луна – небесное тело, веками сопровождающее нашу планету. Она не излучает свет, а только отражает его. Луна является спутником Земли, который ближе всего расположен к Солнцу. Луна обладает разнообразными полезными ископаемыми – железом, алюминием, титаном. В поверхностном слое лунного грунта обнаружен элемент гелий – 3, который может использоваться в качестве топлива для будущих термоядерных реакторов, найдены залежи льда.
В начале 21 века Китай опубликовал свою программу освоения Луны, включающая доставку лунохода (2011), отправку грунта на Землю (2012), постройку обитаемых лунных баз (2030). Это заставило ведущие космические державы снова развернуть свои лунные программы.
Меня это заинтересовало, и я то же решил освоить Луну.
Создание робота «Луноход – Т»
Существует много видов конструкторов, но самым популярным и уникальным является Лего. На занятиях по робототехнике мы работаем с конструктором Lego Mindstorms EV3, это самая последняя модель обучающего конструктора фирмы ЛЕГО. Из него можно конструировать модели различных роботов. Роботы старательно трудятся на благо исследования космоса.
Мой робот тоже будет трудится на благо космоса и человека. Я его назвал «Луноход - Т».
Задача моего робота, нужно взят грунт с поверхности Луны для изучения состава.
Несмотря на кажущуюся простоту поставленной задачи, сделать робота, который сможет взять грунт на Луне не так-то и просто.
Для создания робота были использованы:
- Микрокомпьютер EV3 (1 шт);
- Моторы – 4 штуки;
- Датчики касания – 1 штука;
- Датчики цвета – 1 штука;
- Детали конструктора ЛЕГО.
Технология сбора робота
Для создания робота «Луноход - Т» я с начало сконструировал роботизированную руку, используя датчик цвета и датчик касания для управления своими движениями. Робот должен передвигаться по Луне, поэтому так же я создал робота на гусеничном ходу (Приложение 4). Написал программу в среде программирования – MINDSTORMS EV3. Так же мой робот может помогать человеку не только в космосе, но и на Земле (капать, убирать мусор, поднимать предметы). В итоге я достиг поставленной задачи.
Занятие робототехникой развивает навыки информатики, математики, технологии, умение объемно видеть предмет и творческие способности.
Во многих школах уже появляется данное направление, как дополнительные занятия, но я считаю такой предмет нужно ввести в каждой школе, он очень полезен, ведь за инженерами, программистами, технологами - будущее нашей страны.
Заключение
В наши дни робототехника применяется абсолютно во всех областях и профессиях: в промышленности, в медицине, на войне и даже в космосе, роботы помогают нам по дому, а возможно в будущем и заменят многие профессии человека вообще.
В моей работе, я хотел показать, что изготовление робота очень интересный, увлекательный и познавательный процесс. Над созданием роботов трудятся настоящие ученые и инженеры, но каждый школьник может придумать своего робота. Нужно поставить перед собой задачу, какого робота я хочу сконструировать и тогда всё получиться.
Мой робот берёт грунт с поверхности Луны, так же он может служить помощником для человека в других целях (капать, убирать мусор, поднимать предметы).
Я очень хочу, чтобы мое увлечение стало моей профессией, но если я не стану конструктором, я знаю, что навыки, приобретенные при занятиях робототехникой, пригодятся мне в дальнейшем и в учебе, и в работе.
Читайте также: