
Игрушка мануал на руку
Обновлено: 15.05.2024
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:
Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).

Все дети, без исключения, обожают подвижные игрушки. Конечно, проще купить их в магазине, но гораздо интереснее и полезнее сделать своими руками.
С дергунчиками можно играть, можно сделать их актёрами домашнего театра, можно просто подарить детям, но лучше – делать эти игрушки вместе с ними!
Дети будут в восторге от такого занятия.
Дергунчик – вариант механической игрушки, части которой слабо соединены и приводятся в движение с помощью нитей, закреплённых на задней стороне игрушки.
Игрушки- дергунчики известны ещё со времён античного мира. В XIX веке они были популярны во всех странах Европы. В Германии их называли «Хампельман», во Франции – «Пантин», а в англоязычных странах – «Прыгающий Джек». Мастерили такие игрушки и в России, назывались они «плясуны».
Класический дергунчик – это человечек или человекообразное существо с туловищем, двумя подвижными руками и двумя ногами. Изначально дергунчиков делали из дерева, с появлением цветной печати заготовки для них стали появляться в журналах. Над созданием эскизов таких игрушек работали настоящие художники. Картонные дергунчики – это что-то среднее между марионеткой и бумажной куклой.
Значение поделки и её роль:
Игрушка- дергунчик способствует развитию у ребенка образного и логического мышления, творческих и игровых способностей, координации движений, внимания, усидчивости, мелкой моторики пальчиков, тактильных ощущений.
- шаблон будущей поделки;
-цветная бумага или самоклеющаяся.

Технология изготовления
1. Обведите шаблон на картон.

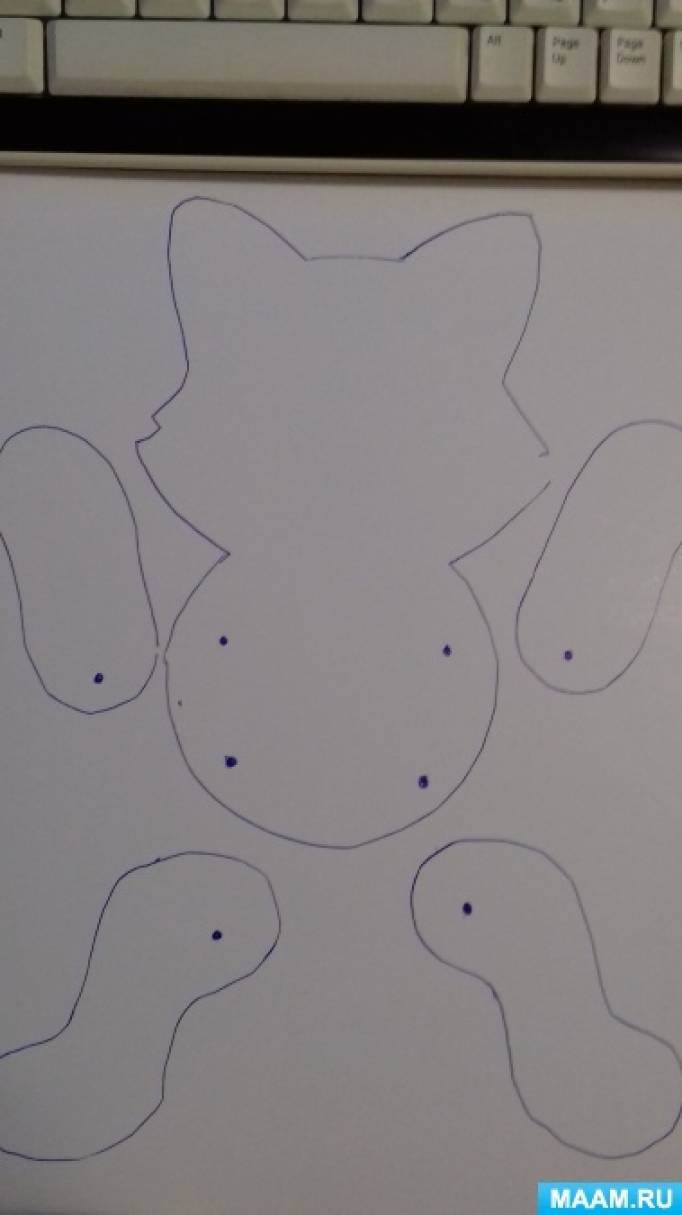
2. Укрась с помощью цветной бумаги или самоклеющего картона мордочку животного,туловище, лапки.


3. Вырежи детали.

4. Разложить детали дергунчика: туловище, две руки, две ноги, четыре проволоки, палочка для накручивания проволоки, две короткие нити для горизонтального связывания, одна длинная нить для приведения дергунчика в движение, большая палка – держатель дергунчика.
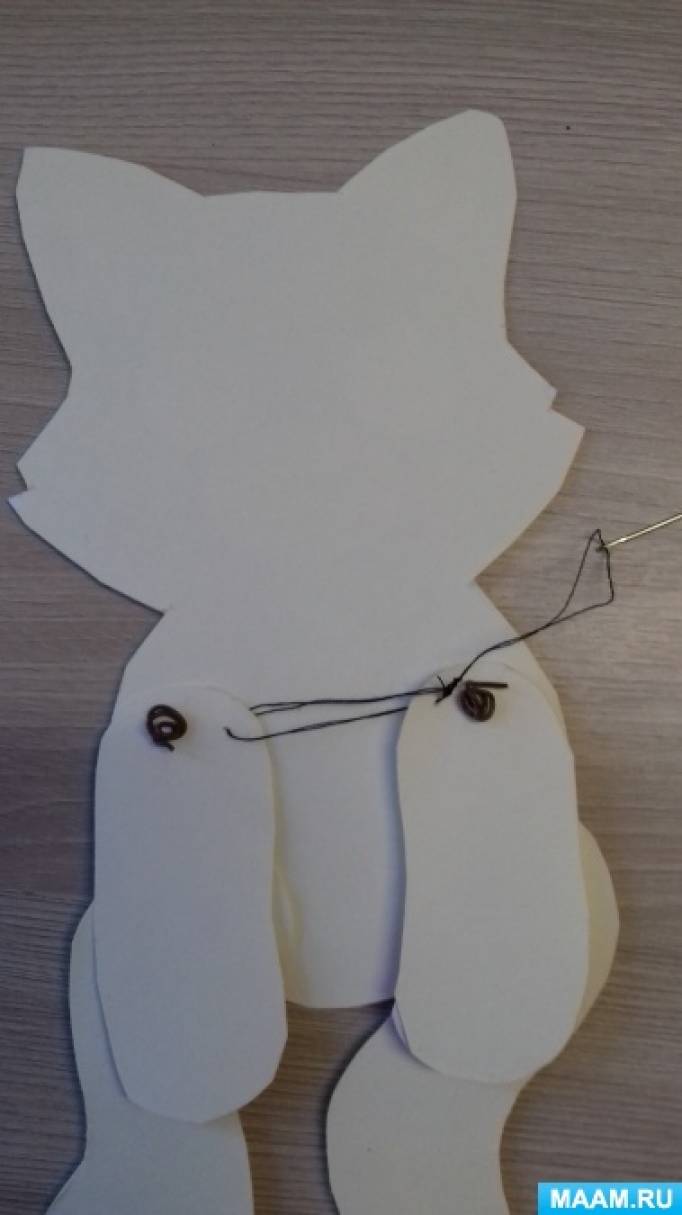
5. Просовываем проволоку в проделанные большой иглой отверстия на туловище, на руках и ногах.

6. Накручиваем проволоку на счётную палочку и сплющиваем её.

7. Вставляем горизонтально нитки, соединяем руки и ноги, связывая их. Отрезаем лишние концы ниток.

8. К горизонтально натянутым нитям привязываем длинную нить, вертикально и приклеиваем большую палку-держатель.

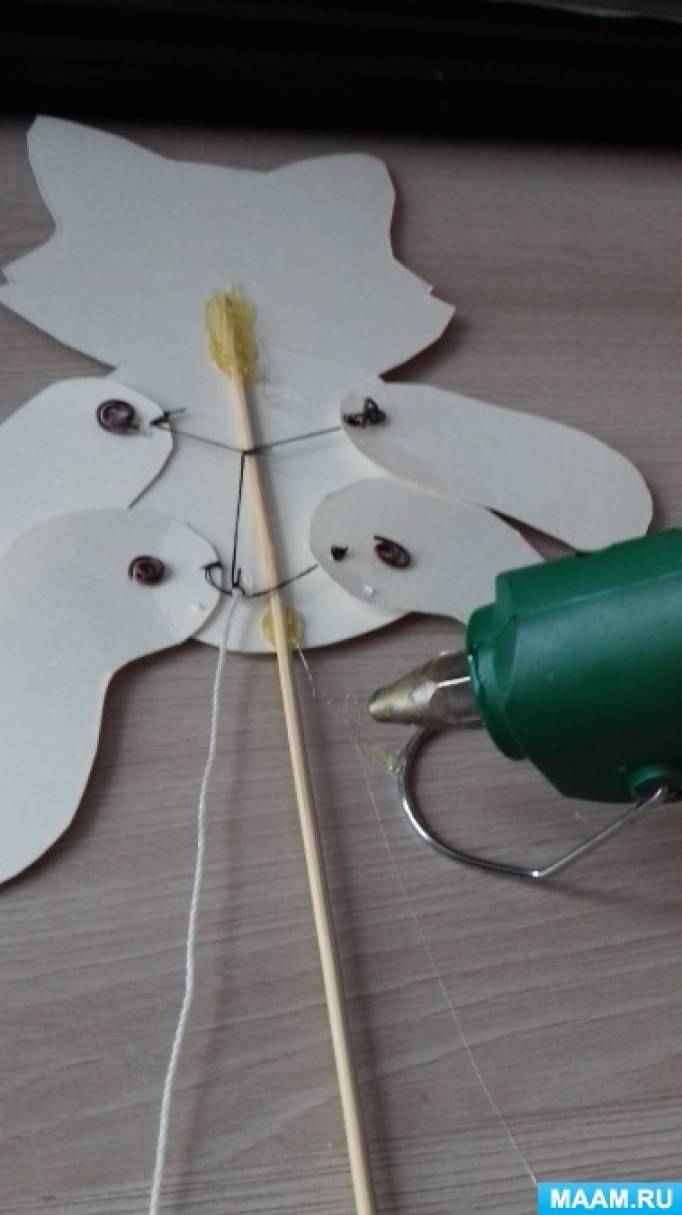
9. Привязываем любую пуговку,что бы было удобно дергать за нить.

Вот какая забавная игрушка - дергунчик получилась.


Мастер-класс по вязанию «Дидактическая игрушка «Зайчиха» Мастер-класс "Дидактическая игрушка Зайчиха" предназначен для педагогов или родителей хоть немного владеющих крючком. У Зайчихи широкая.

Мастер-класс для родителей «Елочная игрушка» Цель: привлекать родителей к совместному творчеству с детьми, познакомить родителей и детей с простыми способами декорирования новогодних.

Мастер-класс «Игрушка из фетра «Кот в сапогах» В последнее время появилось очень много интересного материала для творческой деятельности детей и взрослых:это декоративный пенистый материал.

Мастер-класс по сенсорному развитию «Подвижная игрушка» Цель мастер-класса: повышение профессионального мастерства педагогов в процессе активного педагогичного общения по освоению техники изготовления.
Мастер-класс для воспитателей «Забавная игрушка» МК для воспитателей «Забавная игрушка» Развитие мелкой моторики (гибкости и точности движений пальцев рук) и тактильной чувствительности.

Дергунчики из картона популярны с давних пор, потому что все дети без исключения обожают подвижные игрушки. Такие механические поделки на шарнирном механизме (с помощью нитей) в виде животных, птиц или человечков словно оживают, у них появляется свой характер, душа. А бурная детская фантазия каждому такому персонажу сразу придумывает и свою «особенную» сказочную историю.
- Как делаются дергунчики
- Необходимые материалы и инструменты
- Виды дергунчиков с инструкциями как делать из картона и бумаги
- Сова дергунчик
- Белка дергунчик
- Мишка дергунчик
- Дергунчик клоун
- Привидение
- Дергунчик зайка
- Большой осьминог
- Видео мастер классы
- Шаблоны и готовые игрушки из картона

Любая поделка, сделанная своими руками, получается яркой, красивой. Ее можно подарить близкому человеку или использовать в детских играх. Изготовив сразу несколько персонажей, например, на тему какой-нибудь сказки, можно создать целый кукольный театр, и устраивать необычные представления. Рассмотрим подробно, как самостоятельно создать кукол дергунчиков из картона: схемы, инструкции, видео, шаблоны и варианты готовых поделок.

Как делаются дергунчики
В далеком прошлом поделки-плясуны создавались из дерева, но позднее творческий процесс удалось упростить. И теперь замечательные дергунчики может сделать даже ребенок из картона, бумаги своими руками. Еще больше упрощает процесс изготовление поделки использование готовых шаблонов дергунчика из картона. Теперь «мастером-умельцем» станет и малыш.

Необходимые материалы и инструменты
Для создания желанных дергунчиков из картона потребуются материалы и инструменты:
- картон, плотная бумага – можно цветные;
- проволока;
- шило;
- шпажки, палочки из дерева или пластмассы – для удобного хвата во время игры;
- клей, скотч;
- ножницы или канцелярский нож;
- декор, бусины, пуговки;
- нитки, ленточки или веревочки.
Краски и фломастеры можно выбирать для раскрашивания, если не используются в декоре элементы из цветной бумаги.
Чтобы регулировка движения конечностей у дергунчиков была максимально удобной, можно концы веревочек или нитей поместить между двух кружочков (из картона) диаметром 1,5-2 см и проклеить, или привязать к пуговице, бусине.
Виды дергунчиков с инструкциями как делать из картона и бумаги
Создание дергунчика это увлекательное занятие, как сделать из картона сразу несколько разных поделок разберем подробно далее.
Сова дергунчик
Занимательный дергунчик из картона в виде совы детвора обожает. Создают ее пошагово:
- По готовому трафарету выстригают элементы птицы, или рисую самостоятельно по желанию.
- Заготовки разукрашивают, выбирая оттенки, которые присутствуют в оперении выбранной совы. Можно фантазировать, использовать аппликацию – делать оперение в виде элементов из цветной бумаги.
- Шпажку приклеивают клеем, скотчем на изнанке посередине туловища.
- Шилом прокалывают крылья и корпус – в местах крепления.
- Бусину крепят на конец проволоки, затем ею соединяют крылья с телом.
- Оба крыла соединяют ниткой с тыльной стороны, оставляют длинный конец – для «оживления» совы.
Дергая за нитку, играющий будет приводить в движения крылья – поделка станет подвижной.
Белка дергунчик
Энергичная дергунчик белка собирается по такому же принципу, как сова:
- рисуют шаблон или используют уже готовый – разукрашивают, выстригают детали;
- делают отверстия шилом (по 2 шт.) на лапках, хвосте и туловище в местах крепления;
- элементы скрепляют проволокой, во 2-е отверстия продевают нитки и закрепляют.
Принцип использования тот же.

Мишка дергунчик
Поделка дергунчик медведь создается аналогично этапам создания совы:
- самостоятельно или по шаблоны выстригают детали поделки из картона и одежду из цветной бумаги;
- приклеивают одежду на картонный корпус медведя;
- мелкие детали мордочки прорисовывают фломастером, или приклеивают из цветной бумаги;
- получится пять заготовок – туловище с головой и четыре лапы;
- в местах крепления лап и тела протыкают отверстия шилом, соединяют проволокой (скручивая ее в пружинку);
- в лапах делают еще по одному отверстию, куда продевают веревочки, попарно соединяют;
- веревочки верхних и нижних лапок соединяют с изнанки.
Подвижный мишка дергунчик готов – у него все четыре лапки шевелятся.
Для прочного крепежа в местах крепления проволокой можно добавить круглые «шайбы» из картона.
Дергунчик клоун
Одна из самых любимы игрушек у детей – дергунчик клоун собирается так же просто, как предыдущие поделки. Эта модель имеет свой нюанс сборки – руки и ноги делаются подвижными не только в местах крепления к туловищу, но и в локтях и коленях соответственно. Таким образом, создается максимально подвижная конструкция, фигурка просто танцует, как живая. Сборка по этапам:
- по шаблону выстригают элементы из цветного картона, или белого и раскрашивают;
- в четырех подвижных деталях (руках, ногах) делают по два отверстия шилом – в руках и верхних частях ног (бедрах);
- соединяют ноги – нижние части ног прикрепляют проволокой за колени к верхней части ног;
- ноги и руки проволокой фиксируют к туловищу;
- в оставшиеся отверстия аккуратно вставляют нитки – попарно соединяя между собой руки и ноги (с изнанки);
- нити от рук и ног соединяют в один регулирующий механизм – закрепляют пуговицей, бусиной, кружочком из картона;
- на голове закрепляют петлю – для удерживания фигурки, или фиксируют ее на деревянную палочку при помощи клея, скотча.
Веселая игрушка готова.
Привидение
Максимально простая поделка – дергунчик доброе привидение. Она под силу даже малышам:
- по трафарету выстригают заготовки из цветной бумаги, или самостоятельно рисуют;
- привидению рисую выразительные огромные глаза, можно их сделать в виде аппликации, или подвижными (из заготовок);
- на «крыльях» проделывают по два отверстия шилом, и по одному отверстию на теле (в местах фиксации);
- детали соединяют, скрепляют проволокой;
- «крылья» с изнанки соединяют ниткой через дырочки, оставляя концы для регулировки.
Веселая «Пугалка» для маленьких готова.

Дергунчик зайка
Шаблон для печати на принтере, разукрашивания, вырезания.

В видео показано как делать:
Большой осьминог
Для «продвинутых» мастеров есть более сложный вариант поделки – большой осьминог. Она собирается аналогично всем предыдущим поделкам – фиксация на деревянную или пластмассовую палочку, управление за нить.

Видео мастер классы
Мастер класс на видео по созданию дергунчика из бумаги помогает более детально разобраться с работой, проследить по этапам творческий процесс, сделать с первого раза замечательную и оригинальную поделку без дефектов.
Поделкой удобней управлять, если удерживать сверху ее за петельку пальцами. Для этого круг из плотной бумаги, картона (диаметром 2-3см) приклеивают с изнанки на петельку (из ниток, ленты) на голове игрушки.
Шаблоны и готовые игрушки из картона
Не всегда можно найти пошаговые инструкции к желаемой поделке, но готовые шаблоны игрушки упростят задачу. Останется только приступить к сборке, которая аналогична всем типовым вариантам.
Используя шаблоны куклы дергунчика, можно заинтересовать любого ребенка творческим процессом изготовления древних, веселых, красивых «оживающих» существ в виде человечков, животных. Эти модели способствуют развитию у детей фантазии, логического и образного мышления, усидчивости, координации движения. Созданные самостоятельно игрушки, в которые можно играть, ребенку будут очень дороги. Полученные навыки можно будет оттачивать на новых персонажах-поделках из сказок.
Власть над материальными объектами — пожалуй, лучший способ оценить мощь программирования.

Привет, Хабр! Я пришла разбавить карантинный онлайн подборкой игрушек, которые можно подержать в руках. Надоело же сидеть за экраном! Да и будущее за интернетом вещей, объем этого рынка растёт почти на 25% каждый год.
Гусеница Code-a-Pillar Twist (вторая версия игрушки)
Возраст: от 3 до 6 лет

Code-a-Pillar — посвящение в программисты. Гусеница состоит из 5 модулей — на каждом можно выбрать команду, которую она будет выполнять, например, поворот или проигрывание мелодии. Таким образом ребёнок может программировать игрушку на выполнение разных последовательностей действий — то есть пощупать алгоритмы.
Можно расставлять на её пути препятствия и пытаться их обойти, или, наоборот, пытаться сбить все предметы. Представляя нужную для достижения цели последовательность движений, ребёнок будет развивать логику и стратегическое мышление. Также можно скачать приложение и выполнять задания, которые усложняются по мере прохождения.
А ещё она прикольно мигает и издает смешные звуки — многие ребята тащатся от такого. Музыкальные сегменты — отдельная тема для радости. Вот цитата из отзыва на Amazon: «My grandkids call music segments “dance time” segments». Но где плюсы для детей, там могут быть минусы для взрослых, поэтому имейте в виду, если не любите шумиху:)
Важно! Гусеница очень не любит ковры — колесики цепляются за ворс, её любимая стихия — просторные комнаты с чистым гладким полом. И не забудьте купить для неё 4 AA батарейки.
Настольная игра «Прогеры»
Возраст: от 6 лет до ∞

Настолка помогает на практике понять, что такое алгоритмы, развить стратегическое мышление, память, воображение, логику. И просто весело провести время, ведь для игры нужно от 2-х до 4-х человек. Здесь 2 уровня сложности, поэтому родителям и ребятам постарше тоже будет интересно.
Цель игрока — собирать как можно больше образцов жизни с неизведанной планеты, руководя вездеходом на многоуровневом поле. Каждый ход состоит из нескольких маленьких действий, которые выкладываются в последовательность с помощью специальных карт. Нужно заранее продумать, что будешь делать — прыгать, разворачиваться, телепортироваться, ехать вперед.
LEGO BOOST
Возраст: от 7 лет до ∞

Из этого набора из 847 деталей собирается минимум 5 моделей: робот, котик, гитара, вездеход, автомастерская. Всё это можно программировать в специальном приложении с простым визуальным интерфейсом, которое устанавливается на iOS от версии 10.2 и на Андроид от 5.0 версии.
Игрушка может очень многое. Например, робот способен двигаться по запрограммированному маршруту, определять расстояние, различать цвета, менять скорость, выражать эмоции, жестикулировать. На гитаре можно создавать свои мелодии. А киберкотик так прикольно реагирует на заботу, что в очередь за тем, чтобы его погладить и покормить, станут и все взрослые члены семьи.
Робот Otto на Arduino
Возраст: от 8 лет до ∞

Оtto напечатанный на 3D-принтере
Otto — возможность почувствовать себя не только программистом, но и настоящим робототехником. Ведь детали робота печатаются на 3D-принтере по специальным файлам, которые идут в наборе. На печать нужно не более 5 часов, а собирается он всего за час. Можно, конечно, купить и набор с готовыми элементами, но это дороже (минимум на целых 25 евро) и не так интересно, ведь самое клёвое — пройти весь путь создания Otto от начала и до конца.
Программируется робот с помощью перетаскивания блоков кода в простой и понятной программе Blockly на основе Скретч. Такой легкий старт может стать базой для перехода к C/C++. Кстати, можно кодить и в Arduino IDE — так что это игрушка на вырост или, как минимум, подарочек и себе:)
Программирование робота даёт развернуться фантазии, ведь он может кучу всего: танцевать, реагировать на касания, исполнять мелодии и даже поднимать предметы.
Arduino с «гарниром»
Возраст: от 10 лет до ∞
Цена: от ≈1500 рублей за добротный набор на Aliexpress, от ≈2000 рублей за наборы отечественного производителя

Ардуино — уверенный шаг в мир электроники и робототехники. Это микроконтроллер, к которому можно подключать кнопки, диоды, датчики (движения, звука, температуры, дыма и т. д.), модули связи, двигатели и многое-многое для создания умных устройств. А также Ардуино — одноименная бесплатная IDE для написания программ (использует диалект С++).
Предельно упрощая, Ардуино — умная розетка, которая включает и выключает присоединённые элементы, в зависимости от того, как её запрограммировали, позволяя создавать всё, на что хватает фантазии и смекалки. Программировать можно в специально созданной для Arduino программе «скетч» или в интуитивно-понятном визуальном редакторе кода, например, Scratch для Arduino (сокращённо — S4A).
Есть несколько видов Arduino, для начала подойдёт классика — модель Uno. Также можно взять Nano, которая меньше, дешевле и мало чем отличается от Uno (даже «сердце» у них одинаковое, всё тот же микроконтроллер — ATMEGA328P). За что некоторые небезосновательно считают Nano даже круче.

Вот большая сравнительная таблица ардуинок для тех, кто в теме
С нулевыми знаниями по Arduino лучше купить набор, в котором есть всё необходимое для начала творчества и мануал, который поможет разобраться.
Вот несколько наборов c хорошими отзывами:
Набор UNO R3 Starter Kit с RFID модулем, контроллером, совместимым со средой Arduino, и 12 уроками (2399 рублей на Суперайс)
Неплохие наборы на Амперке, дороже, чем в Китае, зато свои.
Конечно, можно купить Ардуино отдельно (например, 399 рублей на Ampero) и потом добрать нужные элементы (модули и «рассыпуху») под проект. Будет дешевле и кастомнее, но сложнее разобраться с нуля.
Начать можно с простенького проекта, например, мигающего светодиода, подсоединенного к макетной плате с помощью проводов и резистора. А продолжить — созданием чего-то действительно впечатляющего. Например, лазерного мини-гравера или робота-художника.
Видео для вдохновения (устройство работает на Ардуино Nano):
P.S.: Буду благодарна каждому, кто дополнит подборку.
Все игрушки отобраны из советов родительского чатика CODDY и зарубежных обзоров. Цены указаны состоянием на 30.12.2020.
Сразу оговоримся, что совсем дешево делать не будем, т.к. не хочется убивать нервные клетки, делая доморощенные энкодеры для моторчиков + хочется упростить создание 3D модели, которая нужна для управления через ROS (ссылка на готовую модель – ниже в статье).
На момент написания статьи ориентировочная конечная стоимость изделия составляет ~70 000 руб. Если у вас есть 3D принтер, то можно смело вычесть из нее 20 000 руб. Если принтера нет, то его появление станет приятным бонусом. Все расходы я буду описывать исходя из того, что у нас нет ничего, кроме денег.
Как выглядит результат:

Также нужно отметить, что для программирования руки нам понадобится компьютер с установленными ОС Linux (я использую Ubuntu 18.04) и фреймворком ROS (я использую Melodic).
Может возникнуть вопрос «почему 70К рублей – это дешево?»
Отвечаю. Изначально я не хотел заморачиваться с созданием роборуки и думал просто купить что-нибудь простенькое, но достаточно функциональное в сборе.
Что являлось для меня критериями функциональности и минимальной допустимой простотой (т.е. почему НЕ подойдут манипуляторы с алиэкспресса) – можно обсудить в комментариях, чтобы не грузить тех, кому это очевидно и/или не интересно.
Конкурентные решения на рынке
Опишу, однако, кратко примеры того, что я рассматривал на рынке:
Забегая немного вперед скажу, что делать мы будем копию робо-руки PhantomX Pincher Robot Arm Kit Mark II, которая производится именно компанией TossenRobotics.
Итого, видим, что 70 000 руб – это совсем не так дорого.
Что же нам нужно купить?
Все цены привожу на момент написания статьи (июль 2020 года):
1) 6 моторчиков DYNAMIXEL AX-12A

Я покупал по цене 7200 руб за 1 штуку, но, кажется, можно найти и за 6000 при большом желании. Будем считать, что вам не повезет и вы тоже купите за 7200.
Суммарная стоимость: 43 200 руб
Подойдет любой простенький, можно уложиться в 20 000 руб.
3) Arduino Uno + Power Shield


Стоимость: ~4 000 руб
4) Опционально (но я очень рекомендую): Лабораторный источник питания

Стоимость: ~3 500 руб
Сборка
Отлично! Мы закупили все, что нам нужно (вероятно, дольше всего ждали доставки моторчиков, мне их везли больше месяца).
1) Напечатаем детали для манипулятора на 3D принтере.
Качаем STL файлы отсюда
2) Собираем воедино с моторчиками. Проблем со сборкой быть не должно, но если они вдруг появятся, можно воспользоваться вот этой инструкцией
Делаем 3D модель
Класс! Рука у нас есть, но ведь ей же нужно как-то управлять. Хочется максимально использовать достижения человечества, поэтому установим себе ROS.
Для того, чтобы полноценно работать с манипулятором в ROS – нужно сделать его URDF модель. Она будет нам необходима для того, чтобы управлять робо-рукой с помощью пакета MoveIT!
На момент написания статьи последняя стабильная сборка доступна для Melodic/Ubuntu 18.04, чем и объясняется мой выбор версии системы и фреймворка в начале статьи.
Построение URDF модели – довольно трудоемкая (и, на мой взгляд, самая скучная) часть данного проекта. Нужно немного допилить напильником stl модели компонентов и соединить их воедино в XML-образном файле, вручную подбирая правильные коэффициенты смещения деталей друг относительно друга.
Кто хочет – может проделать работу самостоятельно, всем остальным поберегу нервы и просто дам ссылку на свой готовый файл:
В данной модели пока нет захватывающего устройства, однако, до того момента, чтобы захватывать предметы в реальном мире нам еще далеко. Для остальных задач этой модели более чем достаточно.
Выглядит модель вот так:
Из полученного URDF файла мы сделаем конфиг MoveIT!, который позволит нам моделировать движения манипулятора и отправлять управляющие команды на реальную робо-руку.
Для создания конфига есть отличный туториал (ссылка)
Тут я могу опять сэкономить время и предоставить свой конфиг. Лежит он вот тут:
Можно скачать конфиг с гитхаба и запустить следующей командой:
Примерно так можно будет управлять нашей реальной робо-рукой через rviz, когда мы подключим ее к ROS:
А что с реальной рукой?
Переместимся из мира 3D моделей в суровую реальность. У нас есть собранный ранее манипулятор. Хотелось бы его как-то подвигать. Сделаем это с помощью Arduino UNO и Power Shield.
Подключим первый моторчик манипулятора (который снизу) к Power Shield'у и блоку питания следующим образом:

Да, data pin моторчика мы соединим сразу с 3 и 4 выводом Arduino. Пытливый читатель мануала Dynamixel (вот он) сразу заметит, что связь с внешним миром у моторчика организована по Half Duplex Asynchronous Serial Communication, а это означает, что data pin используется сразу и для получения команд и для ответа.
По умолчанию, на аппаратном уровне Arduino умеет работать только с Full Duplex UART. Эту проблему можно обойти, используя Soft Serial библиотеку, что мы и сделаем. Именно использование Half Duplex режима объясняет подключение data pin мотора к 3 и 4 выводам шилда одновременно.
Помимо полудуплексного обмена работа с Dynamixel через Arduino имеет еще пару занимательных моментов, которые могут быть не совсем очевидны с самого начала. Сведем их все воедино.
Как подвигать наш манипулятор?
1) Сначала скачаем нужную библиотеку. Она называется ardyno и ее можно получить через Arduino Library Manager, либо тут (ссылка)
2) По умолчанию Dynamixel AX-12A хотят работать с baud rate = 1000000. Однако Software Serial Interface не потянет такую скорость, поэтому baud rate стоит снизить до 57600. Таким образом, начало файла с вашей программой будет выглядеть примерно вот так:
3) Все наши моторчики соединены друг с другом последовательно. Значит, чтобы обращаться к каждому из них — нужно знать его ID? Это действительно так, объект DynamixelMotor при инициализации получает два параметра: interface (одинаков для всех, его мы задали в предыдущем пункте) и id (должен быть у всех разный, иначе поведение будет у манипулятора весьма странное)
Id каждому моторчику придется задать вручную. Кажется, что будучи соединенными последовательно, они могли бы и сами рассчитаться по номерам от 1 до 6, но этого не предусмотрено. Поэтому нужно каждый моторчик отдельно подключить к Arduino (отключив от остальных) и выполнить следующую программу:
Изначально все моторчики имеют именно поэтому мы и указываем вверху
NEW_ID для каждого моторчика нужно заменить на число от 1 до 6 (да, ок, первый моторчик можно не трогать). Нумеруем их в порядке от нижнего к верхнему.
Ура! у нас есть полноценный манипулятор, который мы можем двигать, а также имеется 3D модель к нему. Можно брать ROS и программировать любые крутые штуки. Но это уже рассказ для отдельной статьи (и не одной). Данное же повествование подошло к концу, спасибо за внимание!
Читайте также: