
Игрушка робот из дерева своими руками
Обновлено: 18.05.2024
Эпоха Эдо (1603-1868) в Японии была временем тотальной изоляции ото всего мира, торговля велась только с Китаем и Голландией через порт Нагасаки. Выезд из страны для японцев был запрещен, как и ввоз европейских книг. Европейский аналитический, расчленяющий подход в науке был чужд японскому менталитету, и поэтому изобретательство и механизация были признаны незаконными. Этот запрет, а также непреодолимая тяга ученых к познанию, созиданию, техническим новинкам и желание богачей развлекаться привели к появлению уникальных механических кукол – «каракури-нингё»

В переводе с японского «каракури» – это «сложное механическое устройство», а «нингё» («кукла») обозначается двумя японскими символами и означает «человек» и «форма».
С технической точки зрения «каракури» - это сочетание многих культур.
Традиции сложной механики пришли в Японию из Китая. Китайская «колесница, указывающая на юг», найденная археологами, датируется 2600 годом до н.э. Сложный зубчатый механизм колесницы учитывал разницу в количестве оборотов ее колес и поворачивал фигуру наездника лицом к югу. Этот «компас» использовали в степях и пустынях. Считается, что первый часовой механизм был изобретен китайским монахом и математиком И Хсингом, а в 604 году его адаптировали для японской системы учета времени.


А в 1551 году испанский миссионер Франциск Ксавьер привез в Японию западный часовой механизм. В Японии сутки делились на день и ночь строго по астрономическому рассвету и закату, а день и ночь, в свою очередь, еще на шесть частей. Таким образом, длительность дневных и ночных «часов» существенно различалась и менялась изо дня в день. Это потребовало адаптации еропейского часового механизма. Часы, работающие по японской системе, назывались «вадокеи». В «вадокеи» действовала сложная система противовесов и эксцентриковых колес, благодаря которой часы каждый день подстраивались под новые астрономические условия.

Сложный механизм «вадокеи» и лёг в основу каракури-нингё. Чтобы привести в движение каракури, использовали энергию текущей воды, пересыпающегося песка и даже горячего пара. Источник энергии был скрыт от взглядов зрителей, кукла двигалась, как живая. К каракури относились не как к изобретению или механической игрушке, а как к чему-то живому, вещи в себе. «Каракури» не разрешалось разбирать, интересоваться внутренним устройством механизма было не принято. Секреты изготовления кукол тщательно оберегались и передавались устно от отца к сыну.
Куклы делали из натурального дерева, без единого гвоздя. Пружины делались исключительно из китового уса. Каждая деталь вырезалась только из определенной древесины, которая в свою очередь заготавливалась только в определенное время года. Иногда на изготовление одной куклы уходило больше года, а иногда и двух лет.
Особое значение имело направление среза дерева. К примеру, в деревянных шестернях волокна располагались равномерно, чтобы обеспечить равное усилие во всех направлениях. Несмотря на неподвижность лица, каракури могли выказывать целую гамму чувств и эмоций. Делали они это с помощью движений рук, туловища и головы.
Эта кукла умела подавать чай гостю: она подходила, а когда человек забирал чашку, кланялась и отходила на своё место.


Куклы были трёх видов: «бутай каракури» предназначены для театров (от этих кукол пошли характерные движения актеров театра кабуки), «даши каракури» - кукла для уличных представлений, «зашики-каракури»- для дома. Последних также использовали на деловых переговорах - они становились отличным поводом завести разговор с гостем и растопить лед. Наибольшую популярность получили зашики-каракури.




I built this simple wooden robot homemade toy for last week's Atlanta Maker Faire. I made about 30 kits to give out to attendees of the fair and they were a HUGE hit. Watch the video above and follow along to see how I built the robot!
Step 1: Add Slot for Mouth
To cut the slot for the mouth, I used a table saw set to roughly a ¼" cutting depth and with the fence set to about 1". Since I was making a bunch of these, I just ripped the slot into an 8 foot long 2x4. If you were just making one of these, you could use a table saw or router to cut the mouth slit. The piece would be too small to use a circular saw, in my opinion.
Step 2: Cut Pieces for the Head, Body, Arms & Legs
The pieces for the head and body of the robot are 3.5" x 3.5", cut from a 2x4. Go ahead and cut as many pieces as you'll need, depending on the number of robots you're planning to make.
The arms and legs are similar to the head and body, except that they're made from 2x2 stock instead of 2x4. Cut 1.5" pieces from a 2x2 to make 1.5" cubes. You'll need 4 pieces to make up the arms and legs.
Step 3: Drill Holes for the Eyes
For the eyes, I used a Fortsner bit. This type of drill bit is perfect for eyes, as it leaves a small dot in the center of the larger hole, making it look even more like an eye!
Step 4: Drill Holes to Attach the Rope in the Head, Body, Arms and Legs
The robot is assembled using rope. You need a hole through the head vertically, through the body vertically, and two holes through the body horizontally. You also need a hole in each of the arms and legs. Make sure to use a drill bit large enough so that you can thread your rope through. Also, make sure to drill the holes in the body so that they do not intersect, since that will mean you won't be able to thread the rope through.
Step 5: Sand Your Pieces
I used a combination of an oscillating belt sander and hand sanding to sand the 180 pieces for the 30 kits I made. I used 80 grit sandpaper, as these didn't need to be perfectly smooth.
Step 6: (Optional) Add Some Flare to Your Robot!
I cut out a tie from a scrap piece of wood I had on hand. You can customize your robot with all kinds of cool accessories. Paper clips for antennas, googly eyes, and more! I also painted the eyes and mouth of my robot.
Step 7: Apply Finish to Your Robot
I used a simple spray polyurethane, but if you have kids that might chew on the robot, you'll want to research a food safe finish such as mineral oil or salad bowl finish.
Step 8: Assemble Your Robot!
I made a mistake on my robot by drilling the holes in the body on the same plane, meaning that once I threaded in one piece of rope, the other pieces of rope couldn't go through the holes since they were blocked. I glued in the rope for my arms and legs, which worked fine, but I'd recommend just drilling the holes on a different plane to avoid this step.
To assemble, just thread the rope through the holes in your pieces and tie the rope off on each end. Simple!
Материалы и инструменты для создания робота:
- 12 сервоприводов типа Tpro – SG90;
- дерево бальза Rectangle (36 x 6 x ½ дюймов), Dow (36 х 3/3 дюймов), Dow (12 x 1/8 дюймов);
- схема Arduino типа Uno;
- двигатель типа PWM – TLC5940;
- 14 резисторов номиналом 4,7К, 1,7 К, 10К Ом;
- конденсатор на 10 uF;
- разъем 538 – 42375 – 1856 (папа);
- плата типа Protoboard 589 – 8200 – 4565;
- аккумулятор 6 Вольт, емкостью 5000mAh (наличие не обязательно);
- 30осный акселерометр типа ADXL345.

Необходимые инструменты:
- сверло размером 1/8;
- нож с острым лезвием;
- термоклей и столярный клей;
- паяльник.
Вот этого набора инструментов и материалов будет достаточно, чтобы создать робота. Без доставки все элементы суммарно обойдутся не более чем в 100$.
Если есть желание сэкономить, то на робота можно не устанавливать батарею, его можно запитать через блок питания на 5-6В.
Чтобы роботу было легче поддерживать равновесие, на него устанавливают акселерометр, но здесь уже будут нужны особые навыки в плане программирования.
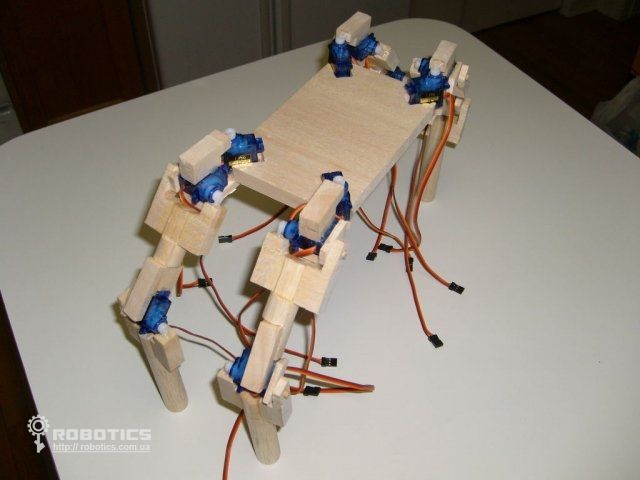
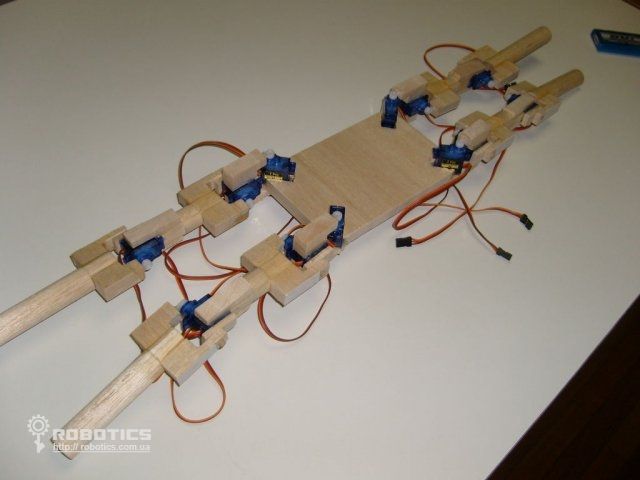
Шаг первый. Как сделать тело робота
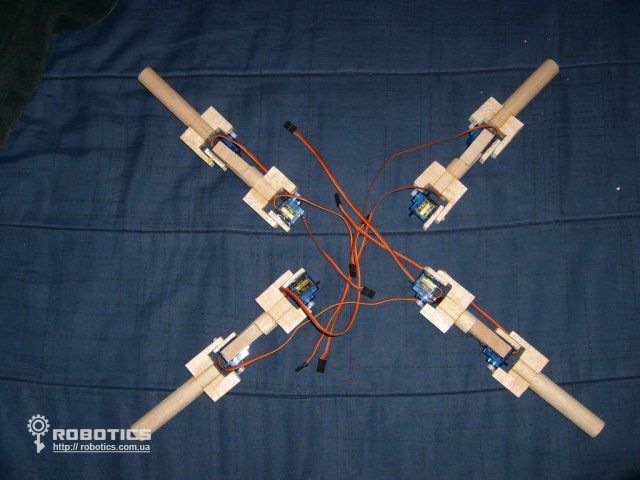
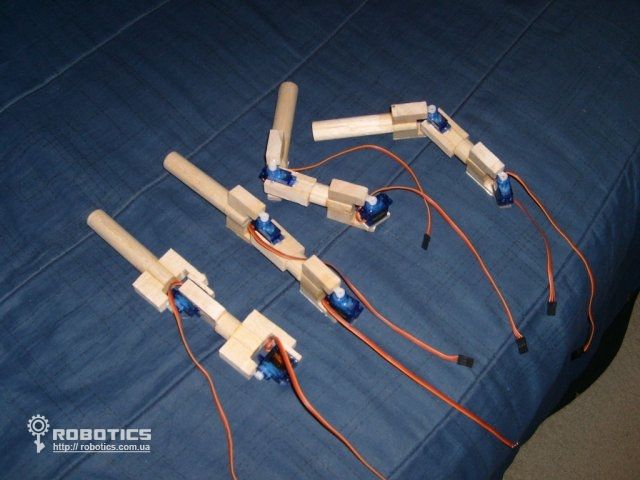
Самым сложным элементом робота является нога. Главное, сделать сперва одну, а затем сделать все четыре не составит труда.
Для работы с пробковым деревом нужен лишь один инструмент - нож. Работать лучше всего за столом, тогда получится получить более последовательные и параллельные разрезы.
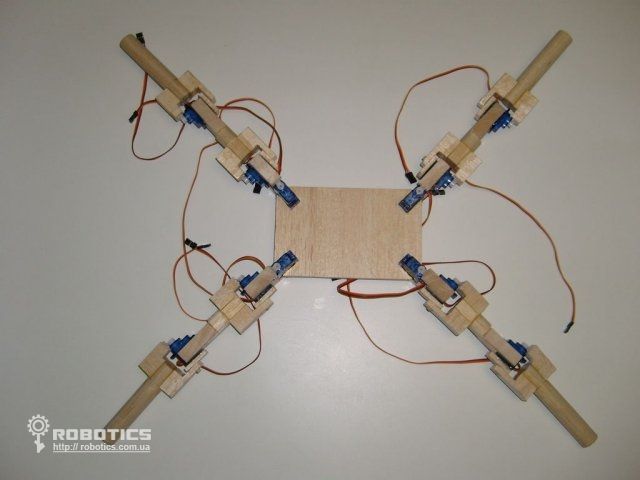
Чтобы сделать первую ногу робота, нужно посмотреть, как она должна выглядеть. Для этого автор прилагает фото с различными вариантами изготовления ног робота. Особое внимание при изготовлении ног нужно уделить точкам опоры.
Еще на рисунках можно увидеть контакты сервоприводов. Они нужны для того, чтобы укрепить ноги и снизить нагрузку на валы серводвигателей.
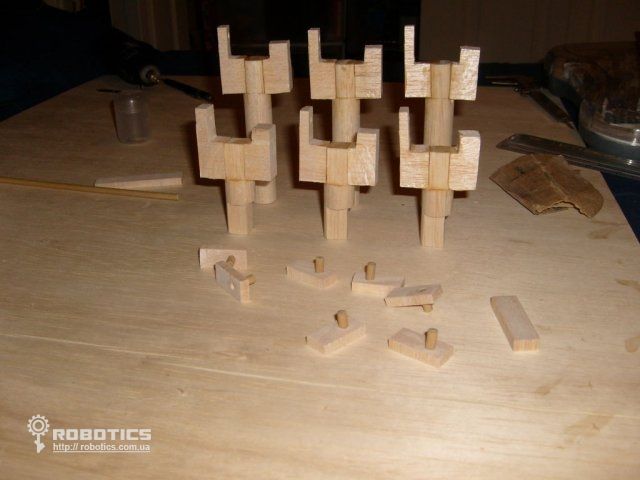
Если говорить о животе робота, то это прямоугольник, который имеет выемки по краям для установки сервоприводов.
Для склеивания бальзы лучше всего использовать столярный клей, он обеспечивает надежную прочность соединения. Еще столярный клей можно нанести на внешнюю часть древесины, чтобы сделать материал прочнее.
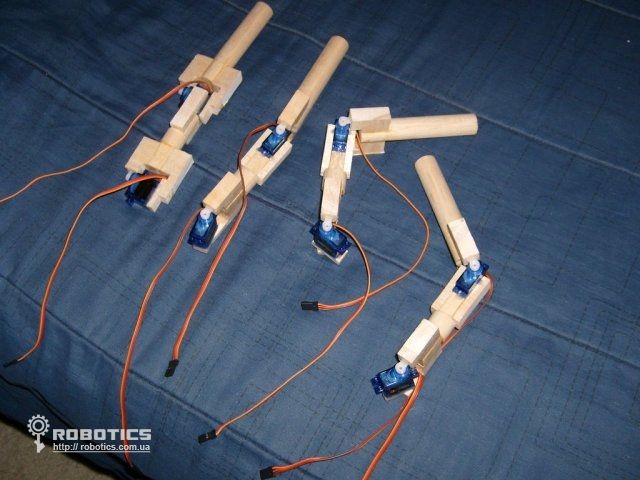
Чтобы прикрепить сервопривод к дереву используется горячий клей. Но практика показывает, что такое соединение может быть не надежным, поэтому здесь желательно подумать и каким-то иным образом фиксировать сервопривод.
Особенность предложенного проекта робота в том, что ноги могут выгибаться на 180 градусов, благодаря этому робот может ходить вверх ногами.
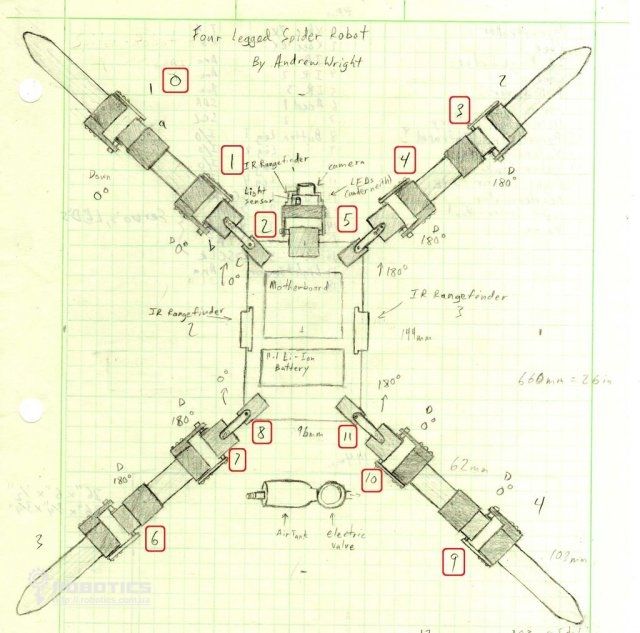



Шаг второй. Как устроена электронная часть робота
Изначально схема имела огромный функционал, но проще она была упрощена и теперь перед ней стоит лишь одна задача - заставить робота шагать. Если в бюджете имеется некий запас средств, систему можно добавить акселерометром. Здесь он будет являть отличным дополнением.
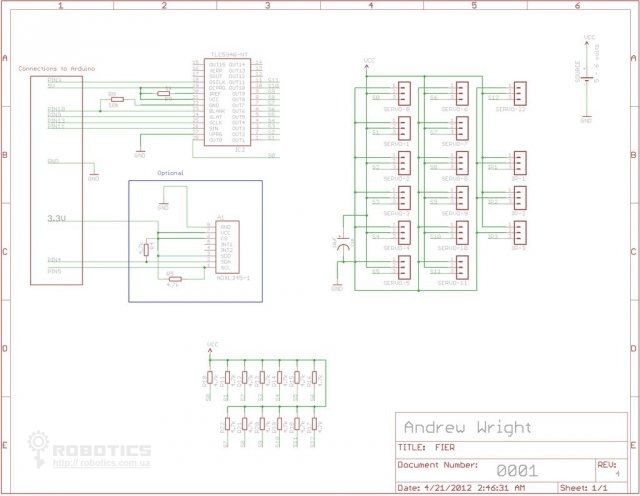
Если взглянуть на схему, то можно увидеть источник питания на 5-6 Вольт. Это основной источник питания для робота, этого вполне хватает для его нормальной работы. Для питания сервоприводов не нужно использовать источник питания от Arduino. Нужно использовать источник питания Arduino только для питания мотора PWM.
Для размещения всех элементов лучше всего создать печатную плату. Не лишним здесь будет передатчик PCB Advanced Circuits, так как проект часто преподносят в виде примера в школах.
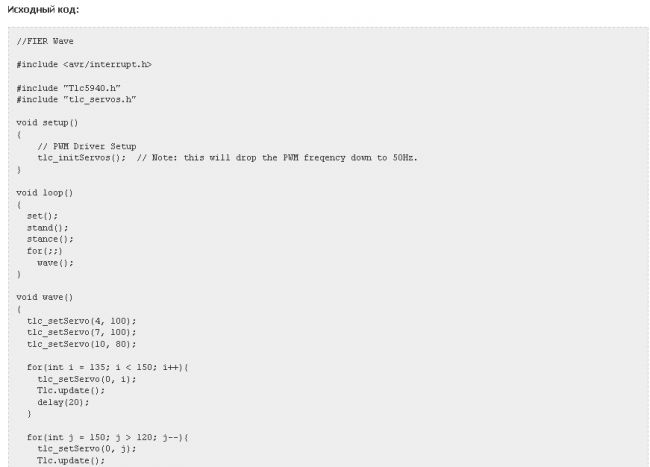
Шаг третий. Программный код робота
Ниже можно скачать готовую прошивку для робота. Если самоделка собрана правильно, то при запуске робот должен подняться и начать покачивать лапой.
Для установки кода для работы понадобятся драйвера TLC5940, их можно скачать на этом сайте .
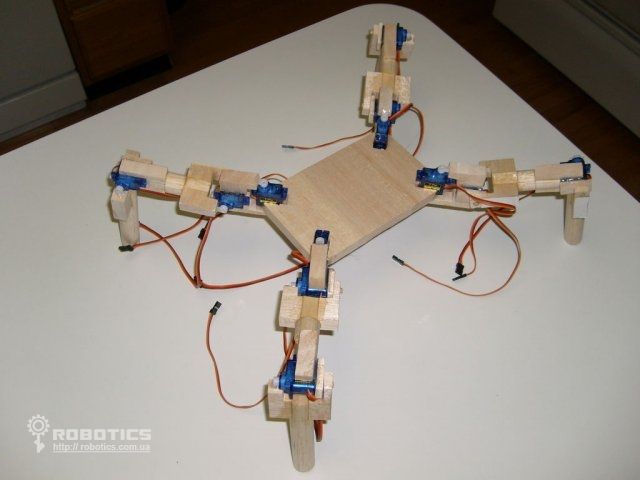
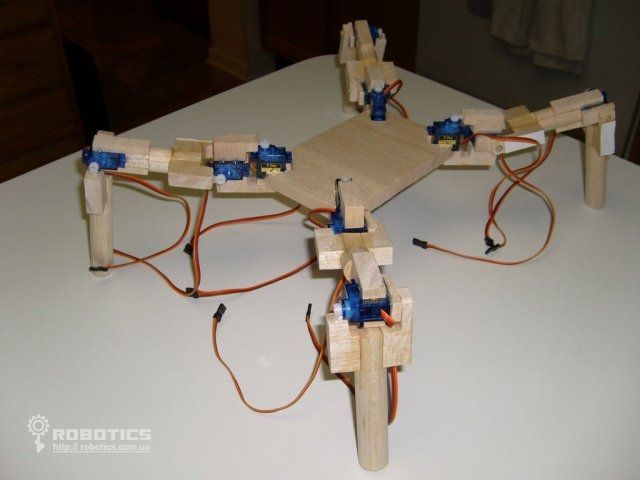
Теперь робот готов и его можно тестировать. При запуске он будет очень интересно передвигать ногами подобно пауку. В качестве апгрейда на робота можно установить камеру, различные датчики и прочие элементы, которые значительно помогут расширить его функционал и возможности.
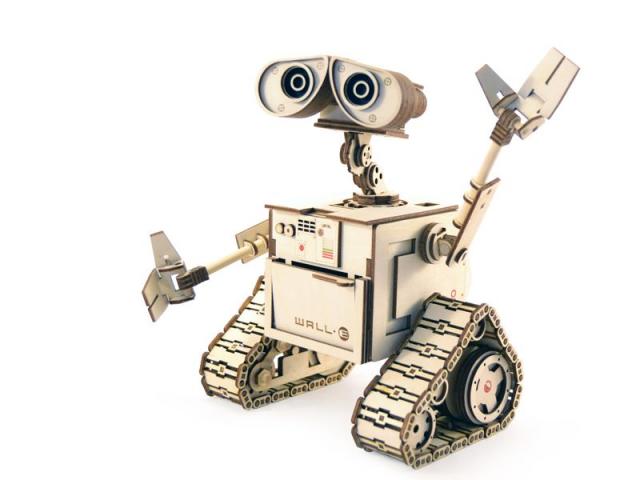
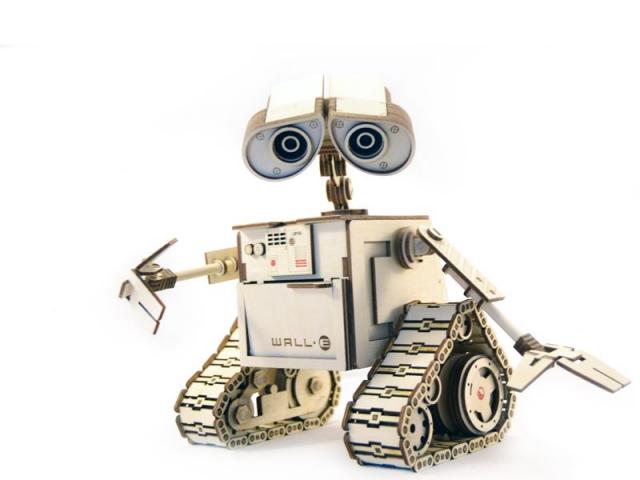
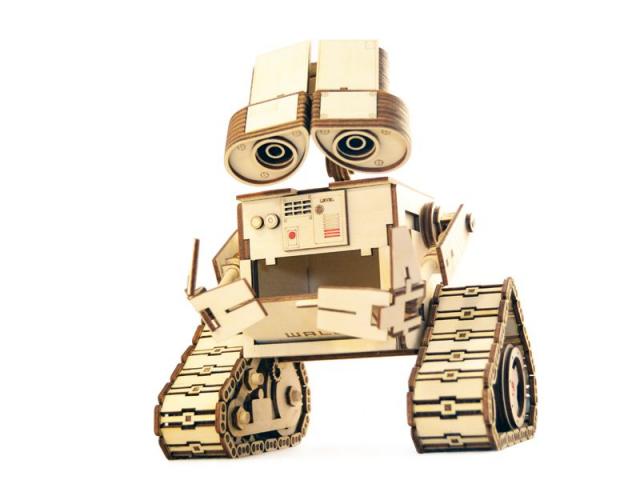
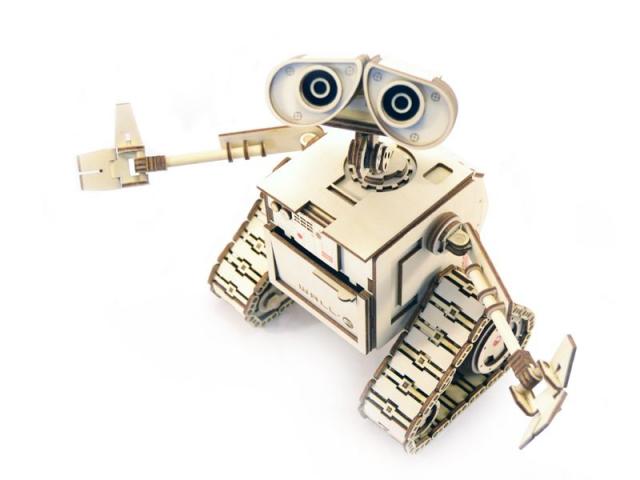
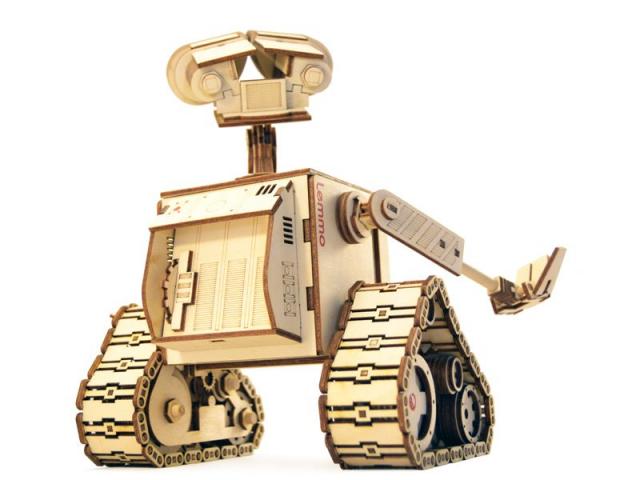
Размеры собранного робота Валли из фанеры 180х170х235мм.
Шасси, руки и голова двигаются.

КОММЕНТАРИИ
ах вы ж обманщики !
это не чертёж, а инструкция по сборке (((
очень жаль ! что обманули
Ответ для Katarine на комментарий: ах вы ж обманщики ! это не чертёж, а инструкция по сборке ((( очень жаль ! что обманули
Там в архиве именно чертежи, в формате CDR.

Ни яркие шарики из супермаркета, ни огоньки, мигающие разными цветами, ни дорогие дизайнерские наборы для украшения новогодних елок не сравняться с украшениями, сделанными своими руками.



Профиль окна я разрабатывал сам, была фирма и можно было выпускать подобные стеклопакеты, но как оказалось финансовая деятельность это не для меня :) ну а чертежи остались, может кому-то пригодится.

Устройство и назначение шагающего механизма.
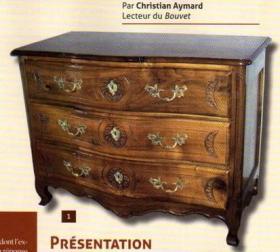
Очень уж приглянулся мне этот комод из журнала Le Bouviet №140. Конструкция не самая простая, но очень хочется собрать такую мебель в свой дом.
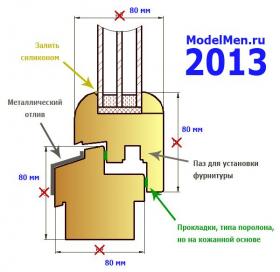
Четыре года назад я опубликовал статью "Чертежи профиля оконного блока (деревянный стеклопакет)", где прикрепил фото и чертежи профилей деревянного окна. За эти годы я получил несколько писем с просьбой показать чертежи угловых соединений или прислать более подробные чертежи. Неделю назад я получил ещё одно такое письмо и вот сегодня я попробую прояснить ситуацию этой обзорной статьёй.

Всё началось с того, что у меня появилась дочь :) Сейчас ей 1.3 года и она уже научилась ловко присаживаться к папе на коленки и читать книжку. У каждого ребёнка как и у взрослого должен быть свой стул. Поиски в детских магазинах не увенчались успехом, стулья все пластиковые и большие или с дыркой для горшка. Нам нужен был нормальный стульчик для сидения, для очень маленькой девочки.

Для своей дочери я распечатал маленького Валли из пластика, она без ума от этой игрушки, тем более что сделал игрушку папа.
Здесь вы найдёте множество чертежей, схем, пазлов, 3д моделей и многое другое. Группа создана для любителей выпиливать и выжигать.
Здесь вы можете выкладывать свои работы по дереву, общаться с другими учасниками, бесплатно смотреть и скачивать понравившейся вам схемы.

Александр Насельский запись закреплена
Iles Jankisiev запись закреплена

Павел Самотугин запись закреплена

Бекбол Садибеков запись закреплена

Любовь Просветленская запись закреплена

Илья Кот ![]()
запись закреплена


Воронеж Воронежъ запись закреплена

Елизавета Егорова запись закреплена

Максим Ионин запись закреплена
Катя Матвеева ![]()
запись закреплена

Читайте также: