
Как работает моторчик из игрушки
Обновлено: 19.05.2024
У меня такой вопрос. Есть такой моторчик маленький там типа прикрепляешь провода к батерейке а он крутится. Немогу догадаться его названия. Как и где можно его купить?
Авлаак'х Маг Искусственный Интеллект (145945) Купить их на этих площадках можно, но если в лом то найди чела у которого есть трехлетний ребенок - наверняка у него в игрушках найдется пара разломанных машинок с такими моторчиками
Электромоторчик называется "электромоторчиком". Или "электродвигателем". Их существуют сотни, если не тысячи разновидностей, размером от спичечной головки до двухэтажного дома. Я видел даже моторчик, умещающийся на торце человеческого волоса - и работающий.
Где взять моторчик - зависит от того, какой моторчик тебе нужен. А это выбирается, исходя из того, ДЛЯ ЧЕГО он тебе нужен и чем ты его будешь питать. Ты всего этого не сообщил, поэтому ответить пока невозможно.
" Я видел даже моторчик, умещающийся на торце человеческого волоса - и работающий. "
Где ты такой видел? Покажи.
Дмитрий Низяев Искусственный Интеллект (685096) В политехническом музее в москве - еще в советское время. Там выставка проходила, одного из современных "Левшей". Там много поразительных экспонатов было, и перед каждым по микроскопу. Реально видно, торчит вертикально кусочек волоса, торец у него разровнян плоской площадкой, и на ней - моторчик. Страшненький, без корпуса, напоминает школьную "рамку с током", наглядное пособие. Но я видел, как он крутился, с десяток оборотов в секунду делал. Что моторчик! Я видел на той же выставке еще один кусочек волоса. Он был отшлифован до почти полной прозрачности, просверлен вдоль (получилась как бы стеклянная трубочка) - и внутри нее уместилась модель трехмачтового парусника. Вот это была фишка :-)
Купить можно много где. Во многих магазинах радиодеталей продаются разные типы подобных моторчиков.
Можно заказать в интернете на сайтах типа eBay, aliExpress и т. д.
Можно купить какую-нибудь игрушку, типа радиоуправляемой машинки, там тоже такой наверняка есть.
Можно разобрать старый CD- или DVD дисковод. Там несколько моторчиков, из них как минимум один будет такой, как тебе нужен.
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:

Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.

Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:

И вот так расположен наш подопытный:

Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:

Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.

Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.

Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:

Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Наверняка у тех, кто имеет детей, накапливается куча старых сломанных игрушек. Где-то отломаны колеса, сломаны пульты. Дети в них уже давно не играют, и все это барахло валяется под ногами.

Дары китайской промышлености
Время от времени мы проводим ревизию игрушек и отбираем те, которые пойдут на разбор.
Внутри типичной китайской игрушки можно найти много полезных деталей:
Один-два мотора с редукторами
NiMh или LiIon аккумуляторы
Имея все эти запчасти и конструктор лего можно увлечь детей конструированием новых игрушек. Приведу пару примеров. Слева моторчик, вклеенный в кубик от лего-дупло. Справа к мотору с мощным редуктором я приклеил платформу от лего.
Тумблер в кубике от лего
Светодиоды оказались необычные. При подаче на них постоянного напряжения они начинают сами мигать разными цветами.
В основной массе китайских игрушек оказались стандартные моторчики, как на картинке выше. Они довольно слабосильные и не могут крутить колеса напрямую. К ним нужен редуктор. Вот, например, небольшой редуктор, сделанный из имеющихся деталей лего-техник. Рядом можно видеть батарейный отсек на платформе от лего.

На Али для таких моторчиков продается готовый редуктор с колесами.
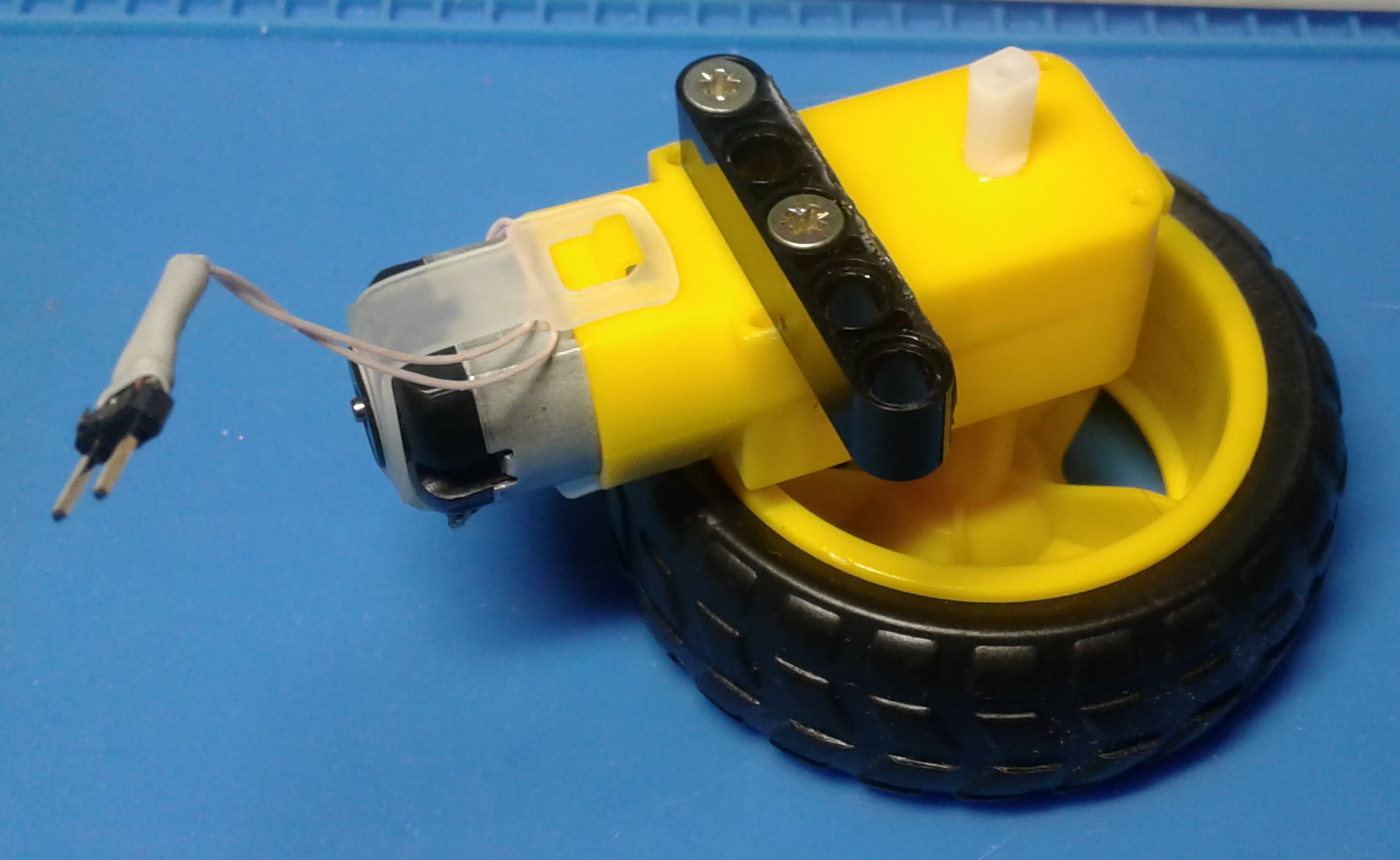
Редуктор с Али
Сгоревший моторчик легко заменяется на запасной. У этого редуктора нет штатных мест крепления, поэтому я прикрутил к нему планку от лего-техник саморезами прямо в корпус.
Отдельного описания заслуживает плата управления. В основной массе китайских игрушек они на 4-5 каналов.
Мне попалась плата на чипе TXM8D423TS. Даташит на этот чип мне найти не удалось, но можно обойтись и без него. Я нашел на этой микросхеме 4 выхода, плюс еще один не распаянный.
На плате есть монтажные точки с надписями F,B,L,R - это выходы вперед, назад, влево, вправо. К ним напрямую можно подключать моторы.
На плате написано 40М, значит, этот приемник работает на частоте 40МГц. Был найден пульт, работающий на 40МГц, но он не смог управлять платой.
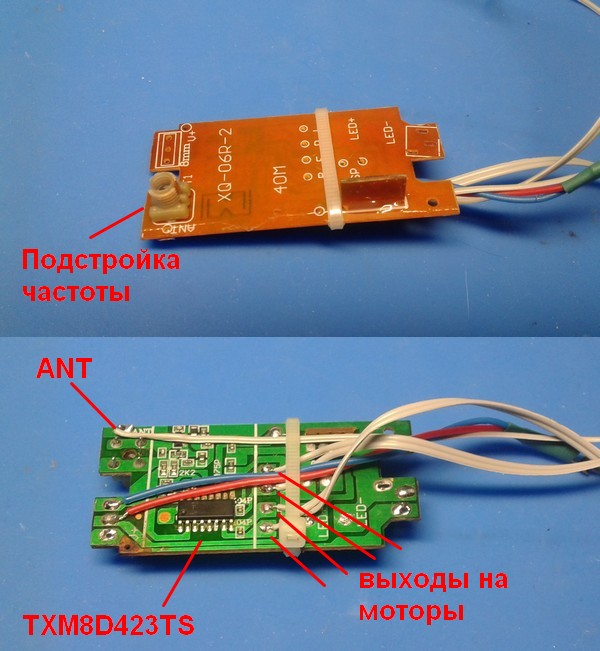
Плата управления
Я предположил, что плата настроена на какую-то неправильную частоту. В углу видна катушка с винтом для подстройки частоты приемника, но для начала надо определить частоту передатчика.
Берем осциллограф. Соединяем кончик щупа с его землей. Получается виток. Этот виток надеваем на антенну пульта, нажимаем на кнопки и видим на экране осциллографа несущую с частотой 40,7 МГц
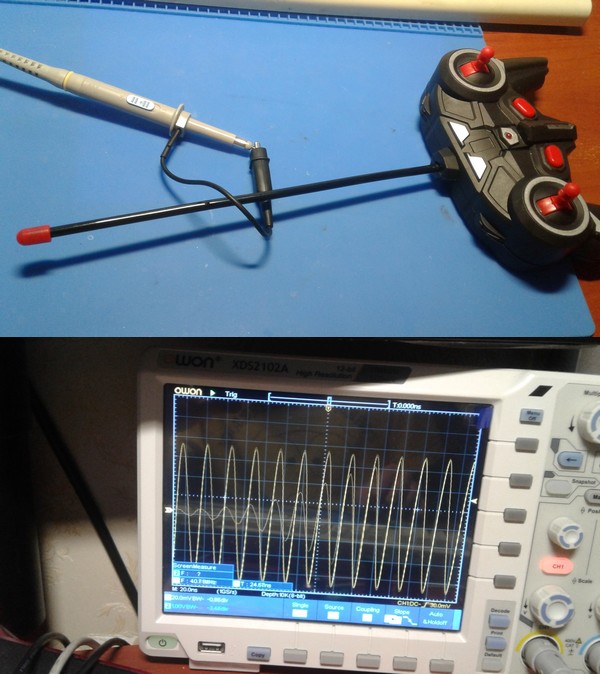
Измерение частоты пульта
Затем внимательно смотрим на плату приемника в районе надпись ANT - это место присоединения антенны. Рядом есть транзистор. Если подать на плату управления питание 5 вольт и взяться щупом за одну из ног транзистора, то тоже можно увидеть какую-то частоту. При этом не обязательно нажимать на пульт. Вращая винт на подстроечной катушке можно получить частоту нашего пульта 40,7 МГц.
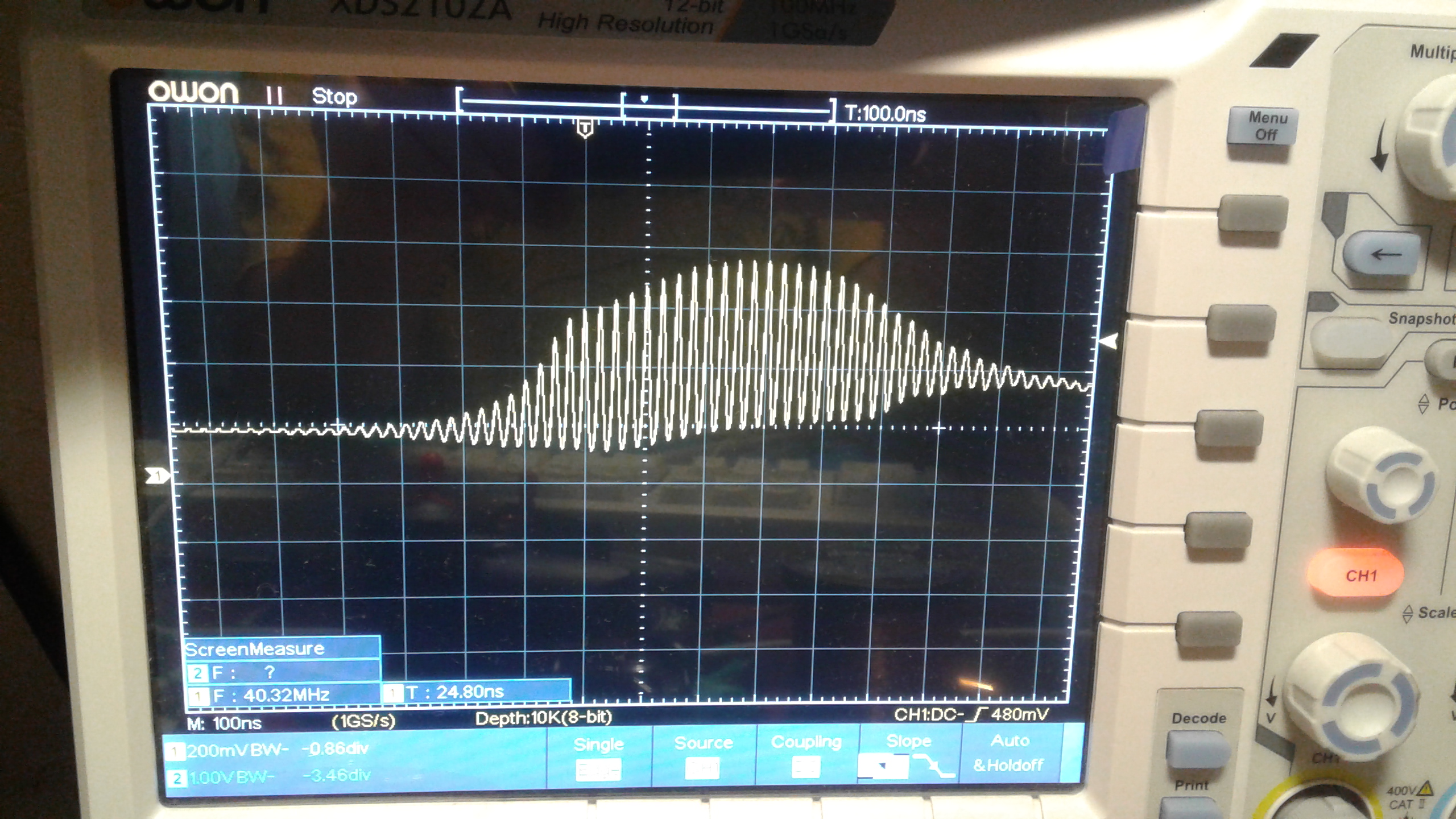
Сигнал на транзисторе рядом с антенной
Как только мы подстроили частоту, выходы F,B,L,R оживают. Изначально на них уровень "0". При нажатии на кнопки пульта на выходах устанавливается уровень питания.
Кстати, о питании. Я на плату управления подавал 8 вольт (2 Li-Ion аккумулятора) и она работала.
В итоге из платы управления и моторчиков дети собрали вот такую машинку на радиоуправлении

Сделать что-нибудь полезное из негодных детских игрушек или бытовой техники мастеру-фантазёру не проблема. И хорошо, что многие электрические приборы устаревают и ломаются. Такие вещи отдавать в починку не имеет смысла — проще купить что-то новое. А истинные «самоделкины» только этого и ждут. У них сразу возникает целый ворох идей, которые требуют немедленного воплощения.
Вторая жизнь детских игрушек
Бывают случаи, когда самоходная игрушка разбивается вдребезги. Наверное, чтобы успокоить ребёнка, нужно срочно купить новую? Вовсе не обязательно. Необходимо просто запустить процесс общесемейного творческого мышления. А для этого из разбитой машинки извлечь оставшиеся годные детали вместе с мотором. Затем собрать все игрушки в доме и остановить свой выбор на той, которую можно ещё раз оживить. Наверное, здесь понадобятся школьные знания по физике, химии и электротехнике.
Ремонт старого вертолетика

На глаза вдруг попался старый забытый вертолёт с негодным двигателем и поломанными лопастями, который давно валялся на антресолях. Он, видимо, ждал своего звёздного часа и теперь с удовольствием показывал бело-голубые бока с полустертой надписью «СССР-0098».
С такими вещами нужно обращаться аккуратно. Старина не любит суеты. Придётся осторожно снять остатки большого главного винта, открутив несколько маленьких шурупов. Чтобы проникнуть в моторный отсек, необходимо снизу убрать пластмассовую коробку для батарей. Двигатель держится на трёх болтиках и имеет, как и положено, два провода «плюс» и «минус», которые через блок микросхем соединяются с тумблером включения. Все это необходимо аккуратно отпаять и открутить.
Вытащив двигатель на белый свет, нужно его осмотреть и сравнить с мотором от машинки. Дело в том, что для создания подъёмной силы достаточно 250 -270 об/мин. и мощности 1 — 2 ватт. Разница в характеристиках двигателей оказалась небольшой. Тогда можно смело ставить на вертолёт свежий мотор. И затем сходить в магазин для моделистов за новеньким несущим винтом. Когда всё готово, проводят испытание отремонтированной винтокрылой машины в присутствии всей творческой семьи.
По такой же схеме чинят и современные детские модели вертолётов. Только сейчас они радиоуправляемые, и поэтому придётся раскошелиться и на пульт управления, от которого зависят обороты несущего винта и скорость вертолёта.
Новый двигатель для игрушечной машины
Для того чтобы сделать детскую маленькую машинку, нужны: колёса, сам корпус автомобиля, провода, пульт управления, разнообразные электронные платы и моторчик. При наличии всего этого добра приступают к созданию модели. Нет необходимости искать двигатель, так как он уже есть. Сам корпус автомобиля можно смастерить своими руками из дерева или пластика и оформить на свой вкус. Хорошо тем мастерам, кто имеет в доме небольшой 3 D принтер, который соорудит любую форму модели.
Часто машинку делают совсем просто. Берут давно заброшенный маленький детский автомобиль с колёсами, разбирают до винтика и пытаются его автоматизировать с помощью готового моторчика. При этом применяются: клей, изолента, маленькие шестерёнки от часов, редукторы от старых моделей и многое другое. И люди, для которых такая забава стала настоящим хобби, часто добиваются большого успеха в самоделках из моторчика.
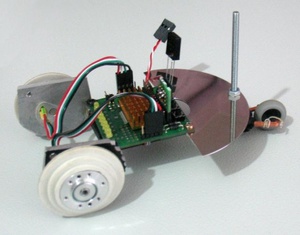
Вентилятор из бутылки и старых дисков

Когда сделаны и опробованы несколько новых моделей детских машин, остаётся заняться общеполезным делом. Необходимо сконструировать вентилятор, который освежал бы воздух и нагонял новые идеи. Для этого нужно всего лишь несколько предметов, находящихся под руками. А именно:
- моторчик от детской игрушки (без него никуда);
- CD диски штук 6-7;
- пластиковая пробка от бутылки;
- картонная трубка высотой примерно 10 см и диаметром 3 — 4 см;
- выключатель;
- клей.
Изготовление начинается с разрезания диска на 8 равных частей от края до центра, не доходя примерно 1,5 см до отверстия. Затем полученные секции необходимо вывернуть одним краем наружу, чтобы получились лопасти. Изготовленный диск одевают на пробку, внутри которой делают отверстие для посадки на моторчик.
Теперь мастерят ножку и подставку. Картонная трубка запросто сойдёт за ножку. Внутрь её спрячут провода и батарейки. Оставшиеся несколько дисков могут служить отличной подставкой. Всё это хорошо приклеивают и красят в разные оттенки. Вентилятор готов к работе.
Кораблик на моторном ходу

Для того чтобы ребёнок не зависал сутками за компьютером, его нужно постепенно приучать к изготовлению разнообразных и интересных вещей, которые он сможет смастерить своими руками. Скоро весна, побегут ручьи, и понадобится маленький кораблик, который будет символизировать наступающее долгожданное тепло.
Необходимые материалы ребёнок найдёт у себя в комнате. Здесь нужны:
- пальчиковые батареи 3 штуки;
- пенопласт, изолента, клей;
- моторчик от CD-привода или игрушки;
- пластиковая крышка от лимонадной бутылки;
- два кусочка пластмассы и железные шайбы.
Первым делом нужно изготовить гребной винт. В пробке готовят прорези для лопастей. Плоские палочки от мороженого и являются готовыми лопастями будущего кораблика. Затем в пробке проделывают отверстие для посадки этого винта на моторчик. Все это хорошенько проклеивают. Силовая установка готова.
Далее, из пенопласта вырезают форму корабля. Переднюю часть лодки делают треугольной, на корме готовят место для гребного винта с моторчиком, а посередине нужно углубление для батареек. Все соединяют и проклеивают. Проводят испытания в ванной и с нетерпением ждут первых весенних луж.
Машинка-глиссер
Эта самая увлекательная игрушка, созданная и опробованная ребёнком. По земле такая машинка передвигается на колёсах, а по воде на специальной лодочке. Изготавливается за 2 — 3 часа.
Делают силовую установку. Она представляет собой двигатель с пропеллером. Лопасти вырезают, используя горлышко бутылки.
Должна получиться розочка. По фото видно, что потом её накручивают на пробку, прикреплённую к моторчику.
Затем делают ходовую часть. Для этого используют шпажку. На неё надевают пробки, которые служат колёсами. Крепят всё к квадратной бутылке, внутрь которой укладывают батареи. Соединяют проводами согласно электрической схеме. Глиссер готов. При желании можно пластиковый пропеллер заменить более жёстким. Тогда ходовые качества такой машинки оценит не только сам конструктор, но и его друзья.
Ползающий робот
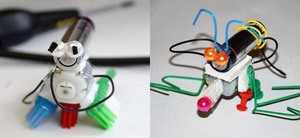
Изготовление робота занимает всего несколько часов. Это не совсем робот, который люди представляют себе. Он не ходит, не плавает, а хаотично ползает по гладкой поверхности. Создаётся такой эффект за счёт разбалансировки вращения ротора моторчика. Для настоящих автомобилей это приводит к трагической аварии, а здесь вызывает лишь улыбку.
Итак, для создания робота нужен моторчик и батарейка. На ось двигателя надевают маленький продолговатый кусочек пенопласта или пенокартона и приклеивают. Это служит дестабилизатором. На самый кончик его крепят декоративный лёгкий элемент.
Сверху моторчика устанавливают батарейку и обклеивают разными интересными детальками. Делают ему ноги из зубных щёток, глаза из шариков, украшают цветной проволокой или скрепками и так далее. При включении происходит значительная вибрация двигателя, которая и заставляет хаотично ползать игрушку.
Другие идеи

Кроме всего вышеперечисленного, моторчики используются в таких самоделках, как минидрели и бормашины. В подобных устройствах не нужны лишние детали. У них одна задача — вращать закреплённое сверло.
Для этого на ось моторчика подбирают цанговый или обычный патрон, который будет зажимать маленькое сверло. Затем припаивают провода от двигателя к батареям через выключатель. Когда собранное устройство успешно заработало, его укладывают в корпус из-под антиперспиранта или какой-нибудь другой, который наиболее подходит под моторчик с батарейками. Всё это маленькое приспособление помещается в ладони. Выключатель всегда расположен под большим пальцем.
Такие устройства необходимы радиолюбителям для высверливания отверстий в печатных платах. Их также могут использовать мастера-краснодеревщики, которые занимаются тонкой объёмной резьбой по дереву. Только вместо сверла они вставляют пальчиковую микрофрезу для выборки и шлифовки труднодоступных мест.
Как видно, проявив немного фантазии и усердия, ребенок с помощью родителей может создать по-настощему оригинальные игрушки и другие полезные вещи.
Ну моторчики такие маленькие которые в машинках на радиоуправлении которые самые дешёвые китайские.
Почему при подаче на моторчик эл тока он крутится?
Я понимаю что внутри 2 по краям магнита а посередине железка обмотанная проволокой, почему эта железка крутится при подачи эл. тока?
Самый умный чтоле?
Я вот и не могу понять.
В википедии заумно написано, и тут надеюсь нормально ответят.
И может ещё спать пошлёшь? школота блин.
Самый простой двигатель постоянного тока - принцип действия основан на взаимодействии проводника с током с постоянным магнитным полем!
Подробней - в школьном учебнике физики.
Димон, магнитики создают постоянное магнитное поле, а железка обмотанная проволокой (якорь) тоже создает свое поле, вот они друг от друга и отталкиваются, а так как железка на оси она крутится. .
Вт попробуй взять в руки 2 магнита и попробуй как они притягиваются и со сменой полюсов отталкиваются
Как же проще-то.
Если проволоку смотать в катушку, то при пропускании по ней тока она превращается в магнит, временно. То есть, она будет притягиваться или отталкиваться от обычного магнита так, будто она сама - магнит. А как только ток в ней прекратишь, она становится снова равнодушна к магнитным полям - проволока и проволока.
Так вот, в моторчике таких проволочных катушек три штуки, одинаковых. И рядом с ними, на том же валу, стоят три скользящих контактика. Куда ни поверни ротор, всегда какие-нибудь контактики окажутся подключены к батарейке. В любом положении ротора хотя бы одна из его катушечек подключена к питанию и ведет себя как магнит. А вокруг ротора - постоянные магниты. Вот с ними катушечка и взаимодействует, заставляя ротор повернуться на какой-то угол.
Но стоит ротору провернуться, как скользящие контакты на нем переключаются, и в цепи оказывается подключена другая, соседняя катушеяка - апервая, наоборот, отрубается. и теперь уже вторая катушка толкает ротор в ту же сторону - он поворачивается еще немного. И так далеее - как бы быстро торор ни старался притянуться одной стороной к магнитам, его катушки все равно успевают переключиться - вот ротор и не может никак остановиться, и раскручиваеется так быстро, как ему позволяет мощность катушечек и трение в подшипниках.
Если пустить ток в другом направлении (поменять маетсами проводки на в ходе) , тогда те же катушечки не притягиваются, а отталкиваются от тех же магнитов - и ротор проворачивается в другую сторону. Но и тут он не может остановаиться, т. к. катушки все время меняются ролями.
Читайте также: