
Как сделать игрушечную подводную лодку
Обновлено: 25.04.2024
1974 год
Отец учит меня плавать. По чертежам из журнала «Моделист-конструктор» делает из 5 мм-й фанеры модель подводной лодки с резино-моторным двигателем. Идём на речку купаться и запускать. Лодка ныряла и уплывала на глубину. А отец подталкивал меня, чтобы я сам её доставал. Я же пытался до неё доплыть. Отец конечно страховал…
1982 год
В доме пионеров на выставке детского творчества я увидел похожую модель лодки с резиновым мотором. Только она была сделана значительно симпатичней той, которую сделал мне отец. Сделал модель семиклассник, жаль фамилию не вспомню. Я тогда, видимо, от большого ума подумал, вот ребята ерундой занимаются. Роботов надо делать, а лодочки на резинке.
Настоящее время
Мелкая моторика развивает мозг, как утверждают отечественные учёные. Иногда я об этом вспоминаю, пытаюсь проверить это утверждение и начинаю выпиливать разные «игрушки».
В этом дачном вспомнил про подводную лодку на резинке, которую видел в доме пионеров. В общем начал выпиливать на досуге. Сделать лодку из фанеры мне показалось слишком просто. На даче по углям валялось много обрезком 20 мм-й доски. Такая доска позволяла сделать модель более менее объёмной. Искать чертежи в архиве «Моделиста-конструктора» я поленился. Профиль корпуса набросал сразу на обрезке доски.
Лобзиком вжик и заготовка корпуса готова.
Длина лодки — 40 см, высота корпуса — 9 см,
Рубка лодки выпилена и того же обрезка доcки.
Теперь много шлифовки, доводим форму корпуса и рубки до обтекаемой. Используем шлиф насадку для шуруповёрта. Сначала снимаем все лишнее крупной шкуркой с зерном Р40, потом шлифуем поверхность шкуркой с зерном Р80.
Рубка приклеена к корпусу эпоксидкой,
Рули глубины сделал из оцинковки толщиной 0,8 мм. Лобзиком выпилил заготовки.
Заготовки скруглены с помощью шлиф насадки и шуруповёрта. Просверлил отверстия под болты М6, на котором будут закреплены рули. Согнул в тисках.
Рули в сборе. Руль фиксируется на болте М6 длинной 60 мм гайкой, две гайки в центре закрепляют рули на корпусе.
Корпус лодки покрашен, Сначала покрыл корпус маслом, чтобы подчеркнуть текстуру дерева. Масло легло плохо. Не долго думая, развёл серебрянку. Добавил немного алюминиевой пудры в яхт-лак, как следует размешал и кистью покрасил корпус. Вроде краска ровно легла. После высыхания краски просверлил отверстия для установки рулей глубины.
В передней части лодки просверлено отверстие. В него на циакрине вклеен крюк для резинки.
Винт
Для втулки под винт сгодилась латунная трубка с внутренним диаметром 2 мм.
Трубка припаяна к прямоугольнику из оцинковки.
Сам винт сделан из оцинковки толщиной 0,4 мм. На оцинковку приклеивается малярный скотч. На нём «рисуем» винт.
Вырезаем заготовку винта по эскизу. Придаем округлую форму используя шлиф насадку.
В центре винта просверлено отверстие диаметром 1.5 мм. Вал — стальная проволока диаметром 1,5 мм. Припаять сталь к оцинковке сложно, но можно. Нужен специальный флюс для пайки стали. Вроде как с помощью такого флюса припаял.
Первый винт сделал диаметром 6 см. В качестве подшипника скольжения использованы фрагменты крышек от пластиковых бутылок. Вал вставлен в втулку. Круглогубцами загнут крючок для резинки.
Втулка двумя шурупами прикручена под корпус. Снизу резиномотор защищён толстой медной проволокой, которая служит ещё и балластом.
Резинка натянута. Первое испытание было проведено в бочке для полива. Лодка легла на бок. Масса балласта была явно недостаточной.
На проволоку повесил свинцовую пластину. Вес определил на глаз. Лодка получилась симпатичной не стыдно поставить на полку. Для этого на скорую руку смастерил для неё подставку. Ещё был сделан запасной винт диаметром 9 см.
С новым балластом лодка замечательно встала на воду. Немного поэкспериментировал с шагом винта, выгибал лопасти под разными углами, заводил двигатель и смотрел, как лодка загребает винтом в бочке. Надо было выходить на большую воду, чтобы понять окончательно, как она поплывет.
Первые испытания на пруду показали, что пруд грязный и на резинке толщиной 3 мм, сложенной в двое лодка проплывает всего метра 4 не более и нырять отказывается. Резиновый моторчик я накручивал оборотов на 100-120. Когда же была установлена резинка сложенная в 4 раза – винт при заводе двигателя отломился.

Представляем Вам очередную действующую игрушку. Как и в прошлой статье, Вы увидите на видео готовое изделие в действии и прочтёте описание процесса изготовления. Сложностей с изготовлением у Вас не возникнет, даже если игрушку вместе с ребёнком будет делать мама.
Для начала о достоинствах игрушки своими руками:
1. Ребёнок приучается работать руками
2. Ребёнок приучается мыслить нестандартно и начинает понимать, что то, чего ему будет не хватать по жизни, можно изготовить своими руками из подручных средств.
3. Ребёнок начнёт понимать, что сделанная игрушка интересней покупной.
4. Вы проведёте время с ребёнком (1-2 часа)
5. Игрушка не требует денежных затрат на покупку и замену батареек.
6. С игрушкой, сделанной своими руками, ребёнок будет играть долго.
7. Игрушку можно взять на море и забыть там. Не жалко потерять, а дома изготовить новую.
8. Ребёнок изучает принципы элементарной механики и физики и будет потом применять их в жизни и со своими детьми.
Вам понадобится: 2 тюбика из под шампуней, 2 скрепки, 2-4 канцелярские резинки, деревянная палочка. Из инструмента: ножницы, шило, плоскогубцы, клей, острый нож, перчатки.
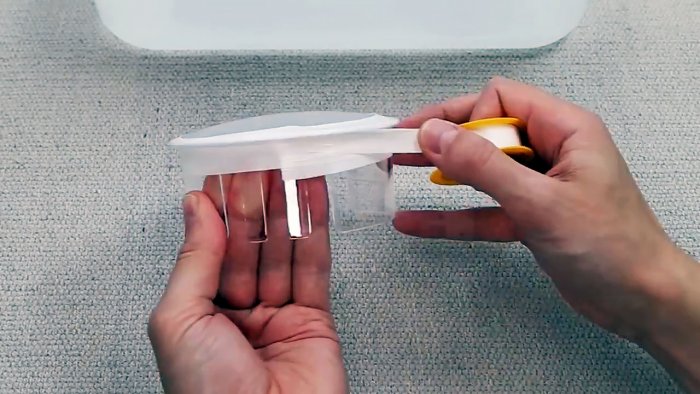
1. Берём первый тюбик для корпуса (специально взят прозрачный) и приклеиваем к нему крышку от второго для имитации рубки. Должна быть приклеена герметично, т. к. только рубка держит лодку на плаву.
2. На верхней и нижней стороне корпуса проделываем шилом по 2 отверстия для заполнения воды снизу и выхода всего воздуха из корпуса.
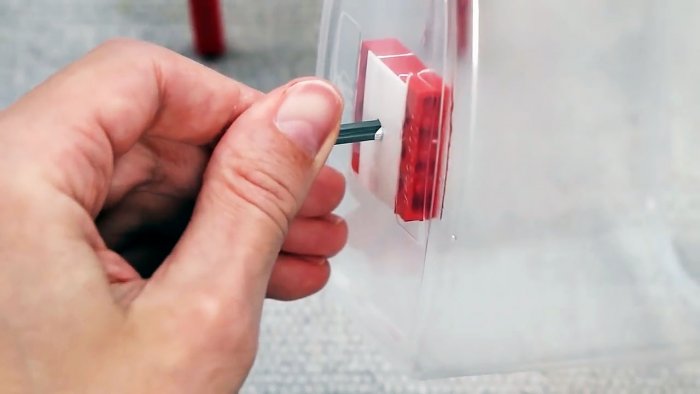
3. В передней части проделываем 2 отверстия и вставляем в каждое по резинке внутрь корпуса, так чтобы остались только ушки. Продеваем сквозь оставшиеся ушки скрепку, соединяя резинки вместе. Если вставить в отверстия по 2 резинки, то скорость и дальность проплыва увеличится.
4. Внутрь на дно корпуса приклеиваем пару тяжёлых болтов или гаек в качестве груза. Без груза лодка будет плавать на боку. Чем больше груз в противовес рубке, тем глубже будет погружение. Можно добиться любой глубины, на которой лодка будет плавать не опускаясь на дно. Поэкспериментируйте. Мы положили небольшой груз для демонстрации, чтобы половина рубки была на поверхности.
5. Самым сложным будет выстругать ножом винт из деревяшки. Посередине отчертите квадратик крепления. Поставте палочку на разделочный кружок и срезайте ножом левый угол вниз от отчерченного квадрата. Повторите операцию с другими сторонами, чтобы получилось две лопасти, направленные в разные стороны.
6. Посередине оставленного квадрата винта сделайте отверстие. Для этого раскалите шило докрасна над комфоркой и прожгите дерево. Процесс быстрый. Достаточно 3-4 прожигов. Рядом в 4 мм сделайте второе отверстие.
7. Большую канцелярскую скрепку или проволоку проденьте в центральное отверстие винта, загните кончик и вставьте его в отверстие рядом для закрепления.
8. Второй конец скрепки отвинта изогните в виде крючка, вставьте в корпус и оденьте на него обе резинки. Завинтите колпачок.
После изготовления ребёнок раскрашивает и дополняет лодку по своему усмотрению.




Видео запуска подлодки в ванной - смотрим здесь:
В следующем выпуске читайте. Стреляющий торпедный катер из тюбика для морского боя в ванной.
Всех приветствую. Я Максим и хочу поделиться информацией о том, как собирал радиоуправляемую подводную лодку без каких-либо знаний об электронике в начале своего пути.

Сам я по образованию художник анимации и компьютерной графики — программированием или электроникой никогда не занимался. У меня имелся только небольшой запас знаний о пайке, которые передал мне мой дед, когда я еще был школьником начальных классов.
Всю жизнь меня интересовала тема подводных исследований, началось всё тогда же, в детстве, с Ж.И. Кусто, а закончилось разработкой игры про подледные океаны Европы. Но, впрочем, сейчас не об этом.
Решив, что пора увлечения перевести в плоскость практики — я отправился на Youtube. Получил горсть самых базовых знаний и дальше мой путь лежал уже на AliExpress, как и у многих. Закончилось всё покупкой 27-ми наименований различных модулей и прочих компонентов.

Сотрудник почтового отделения был очень недоволен когда искал 27 посылок…
Начало работ над подлодкой и первые неудачи
В конце представлен видеоролик с обзором проекта, а в самой статье я расскажу об интересных проблемах, с которыми я столкнулся и о которых не упомянул в видео.
Сначала я нашел человека, разбирающегося в подводных лодках не понаслышке, он помогал мне с теорией и тестами.
Далее я сразу приступил писать свой первый код для Arduino. Это был код для управления двумя двигателями подлодки. Два потенциометра: левый управляет общей мощностью двигателей, а правый поворотом подлодки (уменьшает мощность у одного из двигателей, в зависимости от положения потенциометра). Все это я выводил на недорогой дисплей, так как планировал делать отдельный пульт управления (в итоге подлодка управляется через смартфон).

Учитывая, что я еще неделю назад не знал как работают потенциометры, то восторг мой был неописуем. Не останавливаясь на достигнутом я пошел в строительный магазин и в аптеку. В строительном набрал разных полипропиленовых труб, муфт и хомутов, а в аптеке я взял несколько шприцев Жане.
Трубы, соответственно, пошли на корпус подводной лодки, а шприцы на модуль изменения плавучести. Как раз модуль изменения плавучести и оказался самой проблемной частью для меня.
Модуль изменения плавучести
Задачи у этого модуля достаточно простые, набирать воду и выдавливать её обратно по команде. И встал вопрос — как толкать поршень шприца, имея горсть сервоприводов, моторчиков и набор шестерней? Вот так точно толкать не стоит:

Это был первый опыт взаимодействия с шестернями и прочими мелочами. Кстати, я смог переделать сервопривод sg90 под вращение на 360°: сточил фиксатор на главной шестерне, который крутил потенциометр, а сам вал потенциометра приклеил в нулевом положении, чтобы случайно не вращался даже со стёсанным ограничителем.

Это всё равно не помогло решить задачу — я не смог надежно зафиксировать шестерню, взаимодействующую с зубчатой рейкой. Полученный инженерный опыт помог мне со второго раза осилить модуль изменения плавучести: я взял более мощную серву, толстую шпильку с резьбой и гайку, которую закрепил на поршне. В этот раз не стал возиться с модификацией сервопривода, решил, что проще использовать внешний драйвер и подключиться напрямую к мотору сервы.



На поршне был размещен лазерный дальномер, чтобы я мог определять в режиме реального времени — в каком он сейчас положении. Ну и опираясь на эти данные о расстоянии, я прописал блокировку поршня, когда он находится в крайних позициях. Возможно, есть и более простые методы определения положения поршня, но я случайно нашел у китайцев очень дешевый модуль — дальномер VL53L0X и решил использовать именно его. В итоге остался очень доволен, библиотека простая, работает как надо, советую. Точность в замкнутом пространстве шприца у него где-то 5мм, в принципе, мне этого было достаточно.

При тестировании возникла еще одна проблема — поршень сильно приклеивается к стенкам шприца. Не знаю с чем связано, но для старта движения поршня требуется прикладывать значительное усилие, после начального застревания дальше идет нормально. Перепробовали почти все виды смазок — многие из них сделали только хуже. Именно по этой причине пришлось добавлять алюминиевый каркас для модуля.
Моторы
С двигательной системой я остановился на самом простом решении и взял готовые подводные моторы. До этого опробовал вариант с мотором внутри корпуса. Заказал дейдвудную трубку в наборе с валом и винтами, но по мере изучения вопроса выяснилось, что для моих целей нужна целая система: сложный сальник, фланцы и т.д. Иначе будет протекать в любом случае. У меня в планах на будущее забросить подлодку куда-то на Ладогу и управлять ею через 3G сети, восседая дома на диване, а значит любые возможные протечки приведут к малой автономности аппарата.

В будущем планирую использовать только подводные моторы, скорее всего бесколлекторные. На данный момент используются вот такие, коллекторные:

Управляю ими используя ШИМ. Продавец говорит, что они на 8 метров глубины максимум, что, опять же, накладывает некоторые ограничения сразу.
Корпус
С корпусом была интересная задача — сделать герметичное соединение, которое бы легко разбиралось. Задачу не выполнил, пришлось всё заклеивать намертво. Когда шприц набирает воду — создается давление внутри корпуса и все наши крепления просто выдавливало. В итоге все важные провода вывели на герметичный разъем, через который можно и зарядить аппарат, и прошить бортовую Arduino, и подключить антенну.
Да, антенна у нас подключается при помощи кабеля и находится в надводном положении, гарантируя надежную связь. Но об антенне чуть позже.




Корпус состоит из полипропиленовых труб 50мм и муфт. Места соединений замазаны герметичной пастой, а сверху, для прочности, залиты термоклеем. В торец вывели носик шприца, герметичный разъем, тумблер включения и два провода для прожекторов. Прожекторы закреплены на носовой затопляемой части, такая конструкция позволила сместить центр тяжести ближе к центру подлодки.
Мозги подлодки
Это самая интересная для меня часть. Когда начинал прорабатывать схему, то еще не знал как работают, например, конденсаторы и для чего они нужны. Очень радовался, когда при выключении питания — светодиод на Arduino медленно тускнел за счет ёмкого конденсатора.
На деле же они в схеме пригодились для сглаживания пиков, возникающих в цепи из-за работы коллекторных моторов. Также они нужны для подключения стабилизатора напряжения.
Аккумулятор у нас из двух ячеек, соответственно 8.4 В напряжение идет на моторы, а 5 В после стабилизатора — на Arduino и прочие датчики. Полноразмерная схема (кликабельно):

Сначала многое не получалось только по той причине, что собирал всё на макетной плате. Никак не мог понять почему не работает та или иная часть схемы. В итоге всё начал паять и положительные результаты тестов не заставили себя ждать.

Одна из интересных проблем возникла и с дальномером. Библиотека у него хорошая, но вот если установить режим точности на средний или высокий, то будет тормозиться весь скетч и управление выйдет с пингом в 2000 мс минимум. Из-за этого дальномер у нас в режиме FAST, но его точности все равно хватает для наших задач.
Следующее, с чем я столкнулся, это кабель-менеджмент. Диаметр корпуса 50 мм. Кажется, что этого много, пока не начинаешь пытаться разместить всё внутри. Я использовал прям чрезмерно жирные кабели, предназначенные для аудио, что меня сильно подвело. Хотелось именно медные, так как удобно их паять, и чтобы не переламывались, как, например, алюминиевые. В следующий раз на поиски хороших проводов уделю больше времени.


Далее сложности возникли только с антенной.
Антенна
В качестве антенны я решил использовать esp8266 и управлять подлодкой через смартфон по Wi-Fi. Только вот у китайцев есть большое разнообразие модулей на базе ESP8266, я приобрел три разных, но смог подключить и прошить только один из них — ESP-01.
В теории, если заказывать теперь, то они уже будут с нужной прошивкой. Управление осуществляется через RemoteXY, а ему нужна определенная версия прошивки для AT-команд. Проблему с поиском нужной прошивки для управления через АТ-команды удалось решить только при помощи гайда от RemoteXY. Кстати, не реклама, просто понравился интерфейс, а уже потом я нашел более удобные и проработанные конструкторы интерфейсов для всяческих IoT.

После успешной прошивки я обвешал модуль необходимыми компонентами для работы и припаял ему USB разъем для удобного присоединения. Интегрировал ответную часть USB в пробку из под обычной бутылки и получилась простая проводная антенна с возможностью смены корпуса (замена бутылки).

Были и еще проблемы, помимо прошивки.
Плата ESP-01 должна работать от 3.3 В, а не от 5 В. Причем как логика, так и питание. Если логику я настроил через преобразователь уровня, то вот с питанием уже было лень возиться и я просто приклеил маленького ребенка радиатора на чип. От пяти вольт нормально работает, но очень сильно греется. Радиаторчик в итоге помогает не спалить чип.

Еще из проблем — я подобрал идеальный кабель для герметичного разъема, но он всего на 2 пина с экранированием, тогда как для антенны нужно 4 (питание и RX и TX для связи между антенной и Arduino на борту).
Выяснилось, что просто отдельно запитать нашу антенну не получится, так как для работы ESP+Arduino нужно обязательно иметь общую землю. Пришлось использовать экранирование в качестве земли у кабеля, а в саму антенну добавлять отдельный аккумулятор. Неудобно, но работает. Проще, конечно, найти кабель на 4 жилы и питать антенну аккумуляторами с подлодки.

На фото удачное совпадение диаметров кабеля, силиконовой трубки и обжимного отверстия у герметичного разъема.
Управление и прошивка
Управление осуществляется через интерфейс со смартфона. Интерфейс составил из готовых модулей прямо на сайте, получил исходный код интерфейса, а дальше осталось просто привязать различные элементы интерфейса к действиям внутри прошивки.

Перед получением исходного кода интерфейса, нужно указать в настройках тип модуля беспроводной связи, с которым будет взаимодействовать Arduino. Прошиваем только саму Arduino — с Wi-Fi модулем дальше общение идет автоматическое через AT-команды. Создается точка доступа, подключаетесь к ней со смартфона и управляете через заранее установленное приложение. Интерфейс приходит от Arduino, он зашит в прошивку и распознается уже самим приложением в смартфоне.
Это был мой самый первый код, я прямо тут его оставлять не буду, поскольку там используются только базовые навыки программирования и базовая математика. Были и сложные для меня моменты — я никак не смог с первого раза сделать обычную логическую операцию — чтобы сервопривод шприца при определенных значениях блокировался на движение в одну сторону.
Например, когда доходит до максимального набора воды — поршень должен остановиться на движение назад, но не должен блокироваться на движение вперед. И наоборот, когда вся вода выдавлена, поршень должен не идти вперед, но без проблем выполнять команды на обратный ход.
Тестирование
Тестирование проводили на заброшенном карьере с относительно чистой водой. Для тестов нужно было закрепить камеру и настроить подлодке дифферент (вместе с базовой нейтральной плавучестью).
Первую задачу решили просто установкой нужного винта под крепление камеры. Чтобы избежать вращений камеры — добавили немного пластилина.

Дифферент правили мешочком, который оказалось удобно зацеплять за хомут, а уже хомут можно легко перемещать вдоль подлодки. Количеством гаек в мешочке мы настроили нейтральную плавучесть, а дальше уже быстро подобрали положения хомута, чтобы подлодка не клевала носом. Решение о таком варианте было принято уже перед самой поездкой на карьер, просто напросто не оставалось времени сделать автоматическую систему правки дифферента. Её, в теории, очень легко сделать перемещением груза по резьбовой шпильке. В следующей подлодке опробую именно такой вариант. Вот, пожалуй, и вся подлодка.
Я записал два видеоролика, где более подробно рассказываю о сборке и показываю кадры, которые удалось снять под водой. Приятного просмотра :
Надеюсь, что материал был интересным. Далее будут эксперименты над камерой давления (для проверки герметичности аппаратов) и тесты подводных вёсел. По ним так же подготовлю материал в виде статьи, но уже с графиками и сравнениями тех или иных решений.

Появление первых подводных лодок относят к XVII веку, но первые идеи погружения людей глубоко под воду появились еще в античности. На практике первые подлодки стали использоваться в XVIII веке во времена американской гражданской войны. Спустя два века подлодки играют огромную роль не только в военных действиях, но и активно используются для изучения морских глубин. Предлагаем вам идеи, как сделать подводную лодку из подручных материалов.
Материалы и инструменты

Чтобы сделать поделку подлодку, вам потребуется
- Клей.
- Картон.
- Шило.
- Спички.
- Ватные палочки.
- Черная краска.
- Ножницы.
- Маленький шарик из пластмассы.
- Жестяная банка.
- Использованная хлопушка.
- Прямоугольная крышка от дезодоранта.
Как сделать подводную лодку своими руками
- Возьмите пустую хлопушку. Сверху вырежьте отверстие в форме крышки от дезодоранта и приклейте ее поверх в виде рубки. С помощью шила можете сделать несколько отверстий и вставить антенну из ватной палочки.
- Из картона сделайте конус с диаметром основания, соответствующим диаметру хлопушки. Это будет корма лодки.
- Далее из картона подготовьте лопасти для кормы и носовые и кормовые рули.
- Приклейте детали из картона к корпусу лодки. Можно сделать в хлопушке разрезы, чтобы детали держались лучше.
- Винт с шестью лопастями можно сделать из жестяной банки. Слегка изогните лопасти, шилом сделайте в центре отверстие и закрепите винт на кормовой части с помощью спички.
Вот как сделать подводную лодку из хлопушки. Поделка готова. Осталось покрасить поделку. Можно использовать для этого обычные краски либо аэрозольный баллончик. Покрасить лодку можно любым цветом, но чаще всего используются черный, зеленый и серый.
Бортовой номер можно написать корректором или акриловыми красками. Если лодка является подарком, то можно написать имя будущего владельца. Это первый вариант, как сделать подводную лодку из подручных материалов.
Подводная лодка из картона
Еще один вариант – сделать лодку из пустых втулок от туалетной бумаги. Для корпуса склейте между собой два элемента. С обеих сторон корпуса вырежьте по два иллюминатора. Из еще одной втулки сделайте рубку. Можно дополнить ее антеннами из зубочисток. Внутрь втулок вставьте цветную бумагу белого или голубого цвета, свернутую в рулон, чтобы иллюминаторы были закрыты. Прикрепите картонный винт сзади, нос лодки можно сделать из дна небольшой пластиковой бутылки. Теперь позвольте ребенку самому украсить поделку. Это наиболее простой способ, как сделать подводную лодку из картона.

Подводная лодка из пластиковой бутылки
Если вас интересует вопрос, как как сделать подводную лодку из бутылки, вам потребуется:
- Пластиковая бутылка.
- Бутылка от спрея для мытья окон.
- Ножницы.
- Канцелярский ножик.
- Силиконовый клей либо клеящий пистолет.
Для начала следует определиться с внешним видом поделки. Хорошо будет смотреться лодка с бутылкой в качестве основной части, рубку можно сделать из верхней части бутылки от спрея, закрыв ее обычной крышкой. Приклеивать бутылки лучше пистолетом. Также можно использовать пластилин. Резать бутылки нужно очень аккуратно ножницами. Ребенку это лучше не доверять, поскольку край получится острым.
Гребной винт изготавливается из картона. Затем в центре делается отверстие, равное по диаметру горлышку бутылки. Винт насаживается на горлышко и прижимается закрученной крышкой. Для украшения лодки можно приклеить крышки между винтом и рубкой, на носовую часть.

Вот как сделать подводную лодку из подручных материалов. Осталось только покрыть ее краской нарисовать опознавательные знаки. Создание такой игрушки не займет у вас много времени, зато очень порадует ребенка. Ведь для детей гораздо важнее сделать что-то вместе с вами, а не просто купить в магазине.
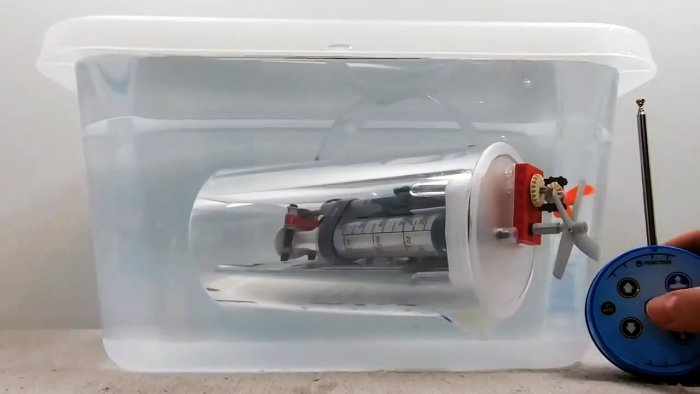
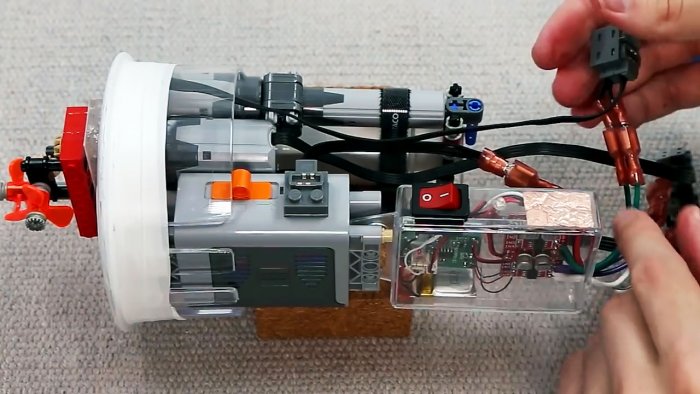
На счету многих моделистов есть самодельные радиоуправляемые модели кораблей и самолетов. Более сложным этапом конструирования является изготовление подводных лодок. Разберем интересную концепцию подлодки на основе деталей Лего и кувшина.
Основные материалы:
- пластиковый кувшин с крышкой;
- 3 моторчика Лего;
- цилиндр Лего
- шприц 60 куб;
- батарейный блок;
- система радиоуправления с дистанционным пультом;
- металлолом для баланса.

Сборка подлодки
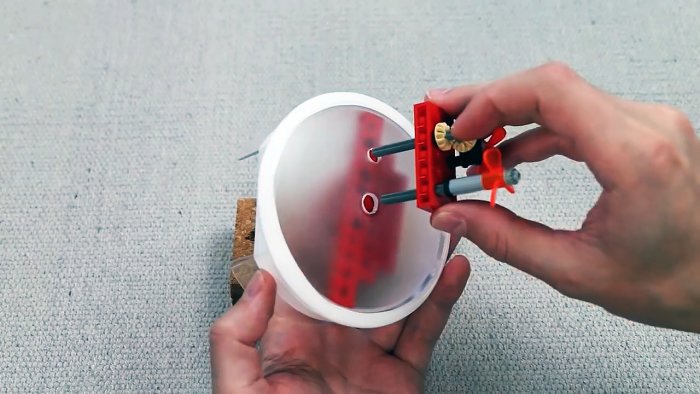
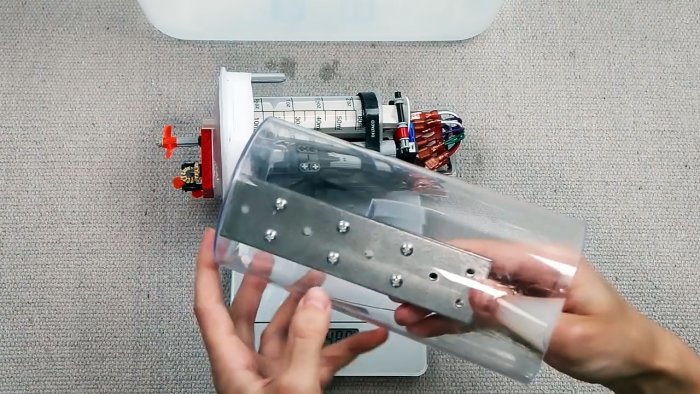
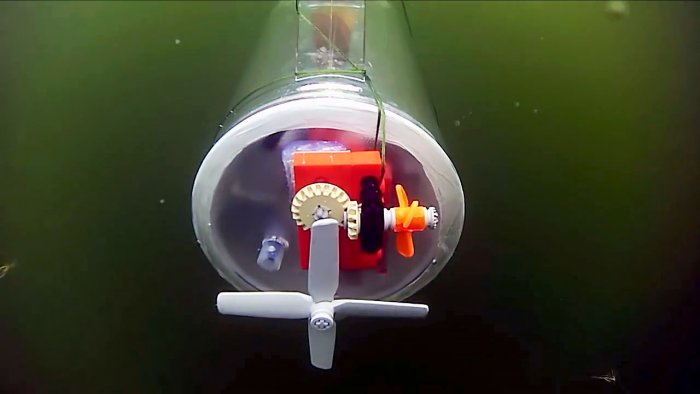
Сначала нужно сделать кувшин водонепроницаемый. Для этого его крышка уплотняется фумлентой, а носик заклеивается термоклеем.

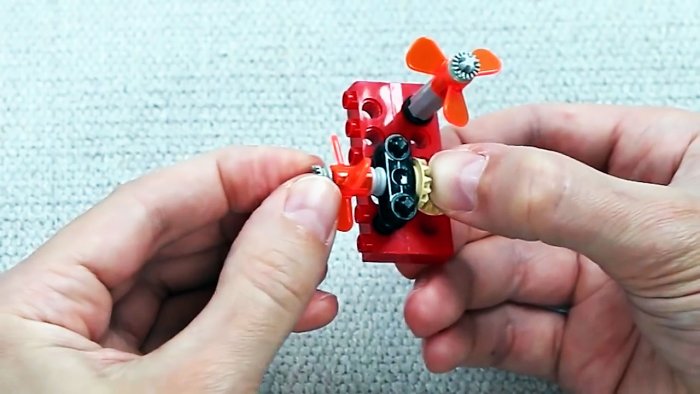
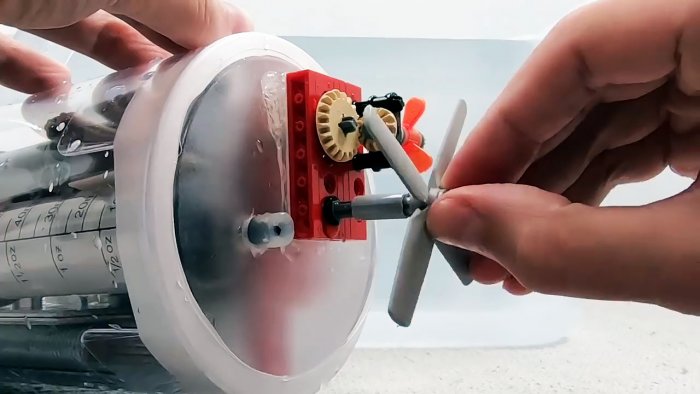
В крышке кувшина делается 2 отверстия, в которые выводятся валы от двух двигателей. Для герметичности они уплотняются фумлентой. На один вал мотора крепится большая лопасть, отвечающая за горизонтальное движение. На вал второго двигателя фиксируется поворотный редуктор Лего с небольшой лопастью, управляющей поворотом лодки. Питание обоих моторов осуществляется через общий батарейный блок.
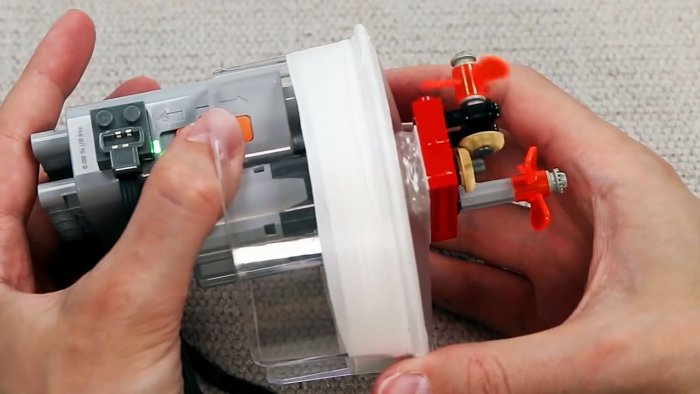
Чтобы сделать механизм набора и сброса балласта нужно соединить вместе выдвижной цилиндр и третий моторчик. Шток цилиндра связывается с поршнем шприца. Корпус двигателя закрепляется к корпусу шприца. Питание моторчика подается через тот же батарейный блок. Данный механизм сможет всасывать воду в шприц, тем самым утяжеляя лодку для погружения, и выдавливать ее для всплытия. В крышке кувшина делается еще одно отверстие, в которое выводится шланг от шприца.



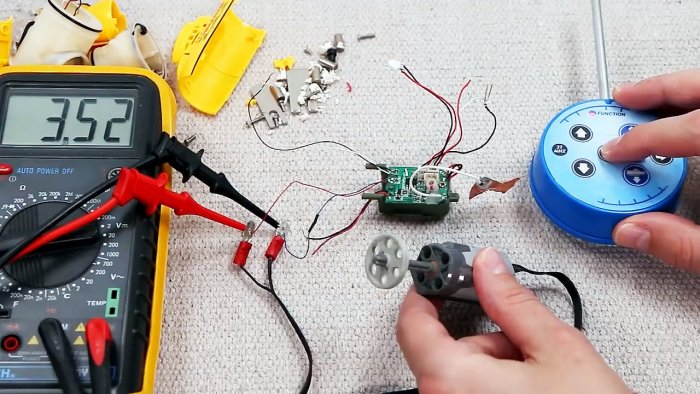
Для управления лодкой нужна специальная система ДУ. Ее можно снять из игрушечной мини подлодки. Применяемая в ней схема управления рассчитана на ход вперед/назад, поворот влево/вправо, набор и сброс балластовых вод. Демонтированное управление лучше спрятать в герметичный бокс, поскольку корпус лодки в любом случае будет давать легкую течь. Питание от батарейного блока с помощью стандартных разъемов Лего подается на управление. От него уже делается разводка по трем моторчикам.



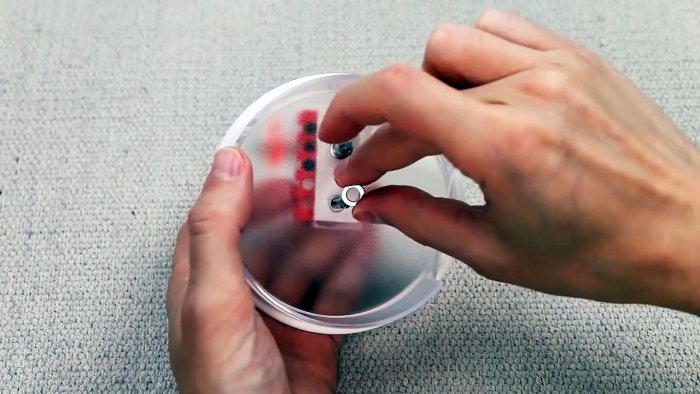
Чтобы подлодка могла нормально плыть, ей нужно придать нулевую плавучесть. Для этого кувшин по края заполняется водой и взвешивается вместе с крышкой. Теперь нужно заполнить лодку балластовым металлоломом так, чтобы вместе с оборудованием она имела такую же массу. Это позволит ей не тонуть, а ровно держалась под верхним слоем воды. Если ее перекосило, то отгрузку нужно перераспределить по корпусу, компенсировав уклон.

Подлодка готова. Если планируется установить в нее камеру, то нужно убрать часть отгрузки. Первые испытания подводного аппарата лучше проводить привязав его ниткой, чтобы вытаскивать в случае ЧП. Периодически лодку придется вынимать из воды и сливать набранную воду, поскольку штатные моторные валы не позволяют добиться полной герметичности.



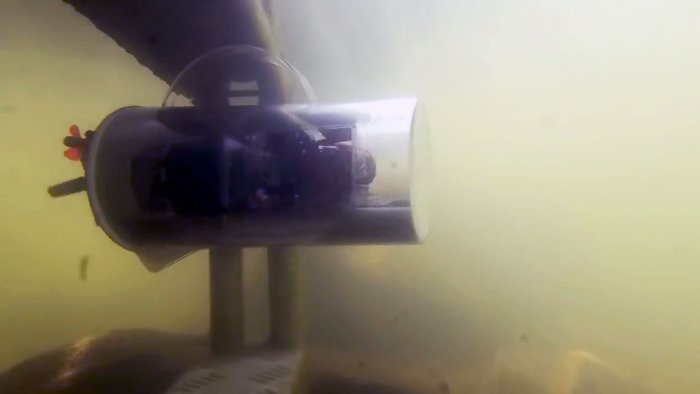

Смотрите видео
Подробная инструкция в этом ролике:
Читайте также: