
Как устроен моторчик в игрушках
Обновлено: 14.05.2024
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:

Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:

Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.

Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:

И вот так расположен наш подопытный:

Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
- напряжение питания логической части: 3-5В;
- напряжение питания двигателя 5.5-36В;
- пиковый ток 2А;
- настройка максимального тока двигателя;
- поддержка интерфейса UART как для управления, так и для конфигурирования внутренних регистров;
- автоматическое отключение питания;
- поддержка микрошагового режима управления двигателем вплоть до 1/16 шага.
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:

Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.

Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко. Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика. Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.

Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:

Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.
Его основные особенности:
- малое количество магнитных полюсов, как следствие, малое количество шагов (у моего, напомню, всего 16);
- относительно большая скорость вращения (следствие из предыдущего пункта), в эксперименте удалось достичь 1875 об/мин;
- неудовлетворительно работает в микрошаговых режимах (не удерживается промежуточное положение ротора);
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Наверняка у тех, кто имеет детей, накапливается куча старых сломанных игрушек. Где-то отломаны колеса, сломаны пульты. Дети в них уже давно не играют, и все это барахло валяется под ногами.

Дары китайской промышлености
Время от времени мы проводим ревизию игрушек и отбираем те, которые пойдут на разбор.
Внутри типичной китайской игрушки можно найти много полезных деталей:
Один-два мотора с редукторами
NiMh или LiIon аккумуляторы
Имея все эти запчасти и конструктор лего можно увлечь детей конструированием новых игрушек. Приведу пару примеров. Слева моторчик, вклеенный в кубик от лего-дупло. Справа к мотору с мощным редуктором я приклеил платформу от лего.
Тумблер в кубике от лего
Светодиоды оказались необычные. При подаче на них постоянного напряжения они начинают сами мигать разными цветами.
В основной массе китайских игрушек оказались стандартные моторчики, как на картинке выше. Они довольно слабосильные и не могут крутить колеса напрямую. К ним нужен редуктор. Вот, например, небольшой редуктор, сделанный из имеющихся деталей лего-техник. Рядом можно видеть батарейный отсек на платформе от лего.

На Али для таких моторчиков продается готовый редуктор с колесами.
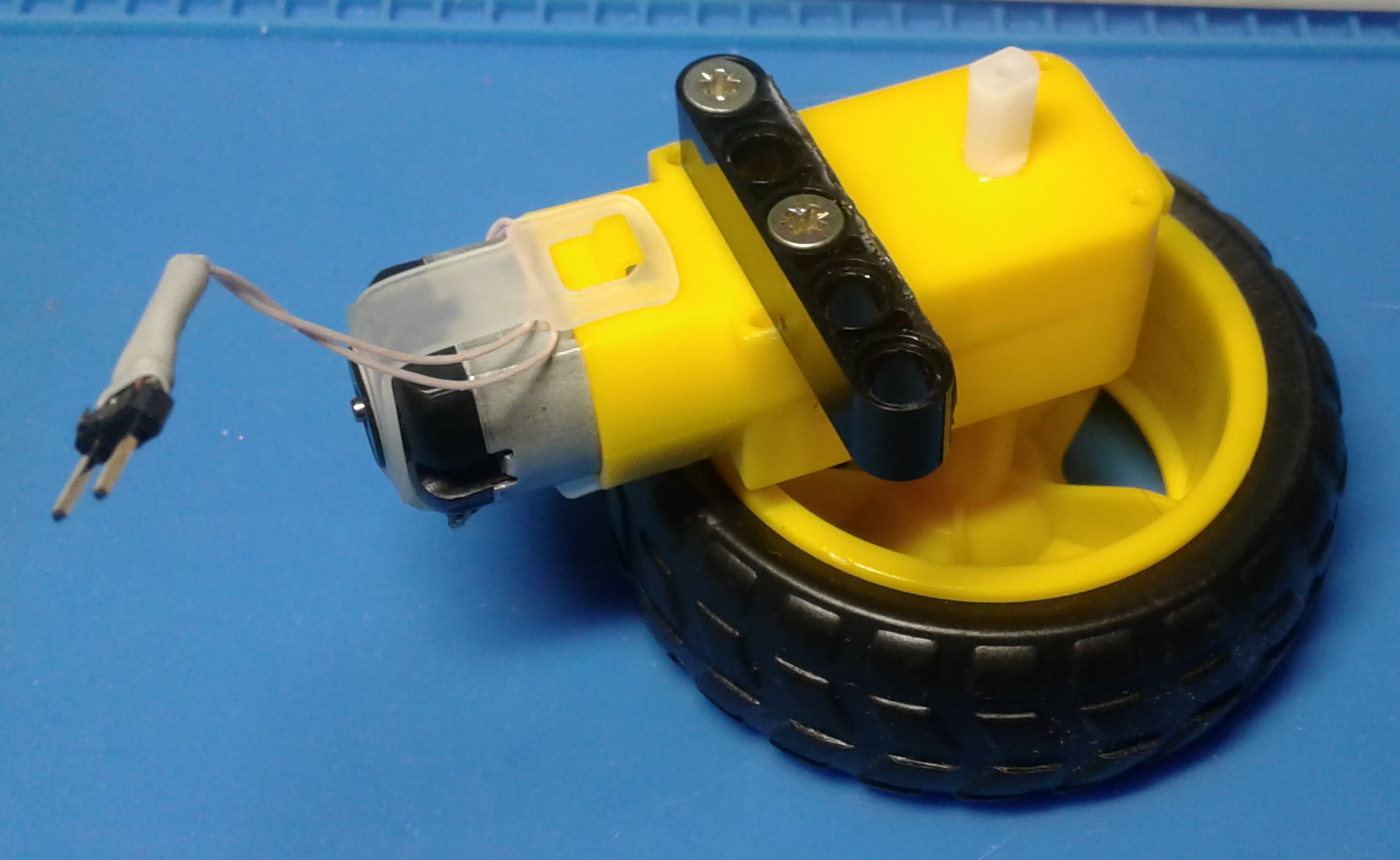
Редуктор с Али
Сгоревший моторчик легко заменяется на запасной. У этого редуктора нет штатных мест крепления, поэтому я прикрутил к нему планку от лего-техник саморезами прямо в корпус.
Отдельного описания заслуживает плата управления. В основной массе китайских игрушек они на 4-5 каналов.
Мне попалась плата на чипе TXM8D423TS. Даташит на этот чип мне найти не удалось, но можно обойтись и без него. Я нашел на этой микросхеме 4 выхода, плюс еще один не распаянный.
На плате есть монтажные точки с надписями F,B,L,R - это выходы вперед, назад, влево, вправо. К ним напрямую можно подключать моторы.
На плате написано 40М, значит, этот приемник работает на частоте 40МГц. Был найден пульт, работающий на 40МГц, но он не смог управлять платой.
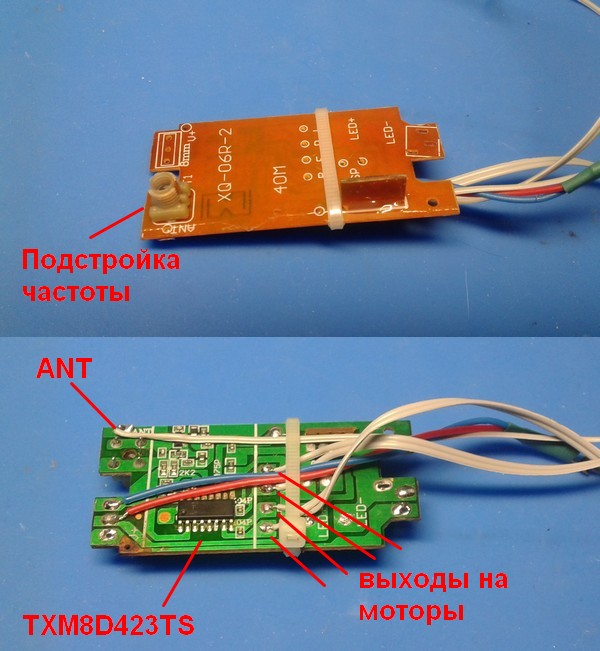
Плата управления
Я предположил, что плата настроена на какую-то неправильную частоту. В углу видна катушка с винтом для подстройки частоты приемника, но для начала надо определить частоту передатчика.
Берем осциллограф. Соединяем кончик щупа с его землей. Получается виток. Этот виток надеваем на антенну пульта, нажимаем на кнопки и видим на экране осциллографа несущую с частотой 40,7 МГц
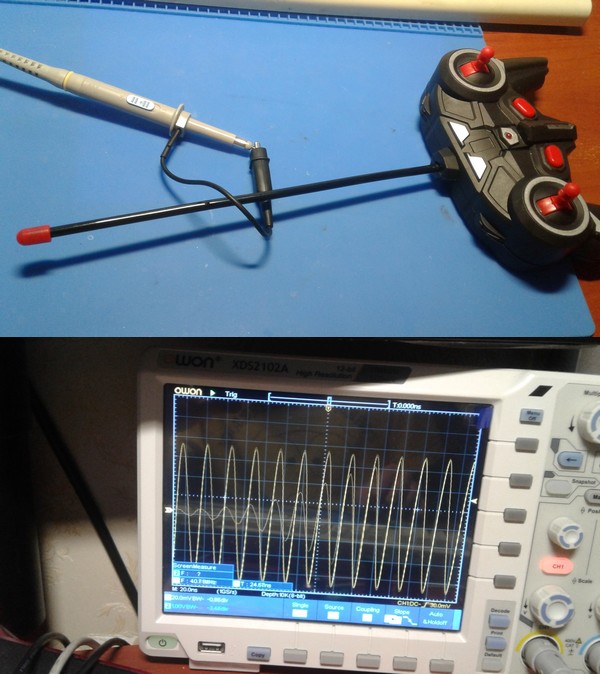
Измерение частоты пульта
Затем внимательно смотрим на плату приемника в районе надпись ANT - это место присоединения антенны. Рядом есть транзистор. Если подать на плату управления питание 5 вольт и взяться щупом за одну из ног транзистора, то тоже можно увидеть какую-то частоту. При этом не обязательно нажимать на пульт. Вращая винт на подстроечной катушке можно получить частоту нашего пульта 40,7 МГц.
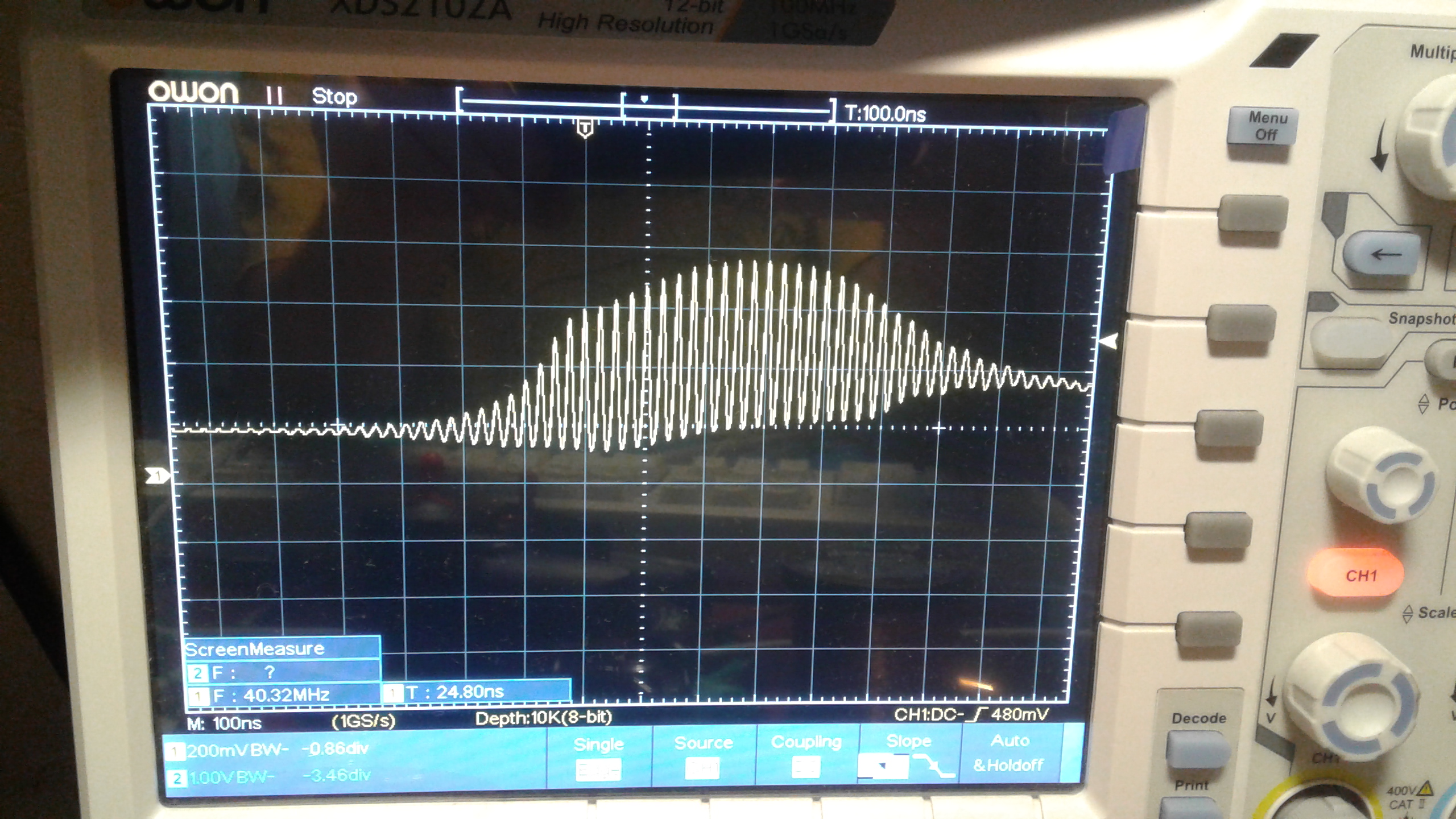
Сигнал на транзисторе рядом с антенной
Как только мы подстроили частоту, выходы F,B,L,R оживают. Изначально на них уровень "0". При нажатии на кнопки пульта на выходах устанавливается уровень питания.
Кстати, о питании. Я на плату управления подавал 8 вольт (2 Li-Ion аккумулятора) и она работала.
В итоге из платы управления и моторчиков дети собрали вот такую машинку на радиоуправлении
Всем привет. Учась в университете я собрал маленький электромобильчик, ну или карт. Его фишкой было то, что всё управление электроприводом, включая тормоза было отдано самодельному контроллеру. И именно о том, как я делал этот маленький автомобильчик, и с какими подводными камнями столкнулся при постройке — хотелось бы рассказать в данном материале. Материал не претендует на уникальность, но для меня это был большой и интересный опыт.

Тема рассказа стоит на стыке аппаратного и программного аспектов. И в прошивке для контроллера я имел дело не с какими-то абстрактными понятиями или данными, а со вполне реальными «физическими» устройствами: реле, электродвигателем, транзисторами итп. Так что приведу кратенькую характеристику технической части, тот состав который был на момент всех танцев с бубном.
Основные узлы
Тяговый двигатель — коллекторный универсальный. Может работать как от постоянного, так и от переменного тока. Рабочее напряжение 220 вольт.

Аккумуляторная батарея — 25 свинцово-кислотных ячеек по 6 вольт фирмы Casil, соединённых последовательно, по итогу получаем батарею 150-160 вольт. Она установлена сзади и перемотана синей изолентой, всё как положено :)

Двигатель приводил колёса в движение через червячный редуктор с передаточным числом i=10. На фото видно, что двигатель сочленен с редуктором с помощью небольшого валика, он был выточен специально.

Системы торможения, то есть тормозного диска с суппортом не было в принципе. Поставить физический тормоз на тот момент не получалось. Поэтому торможение двигателем оставалось единственным реальным вариантом, так что управление торможением машины тоже пришлось брать на себя контроллеру.
Контроллер для блока управления
В принципе простой контроллер для электромобиля можно собрать и на «рассыпухе». Но хотелось бы, чтоб была возможность всё красиво настраивать с помощью программы, 21 век всё-таки. Путём долгих высоконаучных рассуждений за ужином я решил, что за основу контроллера стоит взять чип фирмы Microchip — pic16f877a, вот его краткие характеристики:

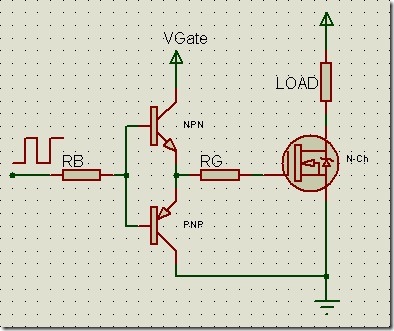
На тот момент я не очень шарил в электронике, и изначально хотел делать схему до безобразия тупой — двигатель включён или двигатель отключен, но вместо реле поставить транзисторный ключ, дабы ничего не щёлкало и не горело. Но решил, что риск оправдан, я ничего не терял да и просто хотелось сделать что-то стоящее. Так что остановился на связке микроконтроллер + силовой полевой транзистор в качестве ключа. Ручку газа и кнопку реверса вывел на руль.
Особенности схемы
При выборе транзистора я не скупился и выбрал IRFP4227PBF — N-канальный полевой транзистор (открывается положительным импульсом) на напряжение 200 вольт и максимальный ток 130 ампер. Корпус TO-247AC. Но, забегая вперед скажу — я смог сжечь и его.

PWM — что это такое и с чем её едят
Раз я использовал микроконтроллер в связке с полевым транзистором, то грех было не попробовать использование pwm/шим в схеме. Что такое шим? Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью методом пульсирующего включения и выключения прибора. — спасибо Википедии.
Достоинство такого способа управления транзистором: он во время работы находится в двух состояниях — либо полностью закрыт, тока нет и ничего не греется, либо он полностью открыт и сопротивление его составляет несколько милиом, соответственно в тепло на самом транзисторе рассеиваются какие-то доли ватта тепла, ну или единицы ватт, схема едва тёплая при таком режиме работы. И такой процесс — отрыть/закрыть происходит тысячи раз в секунду. Это называется частотой шим. Так же есть такая вещь, которая называется «скважность». Переводя на человеческий язык — эта цифра показывает какую долю времени открыт транзистор. Если чуть углубиться — допустим у нас частота ШИМ-синала 1000 герц. Значит транзистор открывается и закрывается 1000 раз за секунду, и процесс переключения между включено и выключено 1/1000 доля секунды. Величина 1/1000 — это период частоты. А с помощью скважности мы показываем какую часть времени от периода транзистор открыт и через него течет ток. Для примера: в программе скважность 255 — это максимальная мощность, 127 — 50%, 0 — транзистор закрыт.
Для генерации такой частоты применялся встроенный в чип «физический» контроллер, хотя есть возможность программной реализации, но в этом случае контроллер только и будет делать, что генерировать на выводе частоту с заданным периодом и скважностью. А с использованием контрллера из переферии МК можно было и генерировать сигнал, и чтоб программа делала что-то ещё.
Чем дальше в лес, тем злее волки — от частоты ШИМ зависит и то, насколько будет эффективно работать электропривод. Я пробовал разные частоты, от 2 до 15 килогерц, каждый раз это менялось программно. Честно говоря особой разницы не успел заметить, но уверен что она есть. К сожалению данных по этому вопросу не удалось получить в достаточном количестве. Единственное, что заметил — с разной частотой пищала машина во время работы. Кстати, если кто-то замечал в метро, электробусах и поездах, что во время старта слышно гул, писк, завывание — это как-раз таки пищат обмотки двигателя из-за работы на частотах контроллера. Очень это заметно на поезде «Ласточка», который по МЦК ходит, во время старта.
Подводные камни в алгоритме работы
Следующая проблема была с реверсом двигателя. Двигатель коллекторный, у него две обмотки — неподвижная — статор, на корпусе, и вращающаяся — ротор. Для изменения направления вращения необходимо развернуть направление тока в одной из обмоток, не меня направления в другой. Для этого использовались два реле, срабатывали они одновременно, «перекидывая» схему на реверс при подаче на них питания. Но в первом варианте прошивки была ошибка — реле переключились под нагрузкой. Как итог теста под нагрузкой — два сгоревших реле, так как двигатель — индуктивная нагрузка и на контактах реле была нехилая такая дуга, контакты просто расплавились и сгорели во время переключения.
Выход из ситуации — вводим в программу условие, что перед переключением снимаем нагрузку выкручивая скважность PWM-сигнала на 0, перекидываем реле, и опять включаем мощность на заданный уровень. Именно так и работали тормоза на машине — реверсом. Только хардкор — никаких датчиков и энкодеров, ничего. А вот и фото релюшки, это вроде как реле стартера от жигулей. Если переключать их не под нагрузкой, то вполне работают и с высокими напряжениями, 160 вольт при 15 амперах держали, но допускаю, что контакты грелись ввиду малого сечения.


После я допилил прошивку и мощность поднималась плавно до заданного уровня. А это уже исключает удары в трансмиссии и нагрузку на узлы. Вот так одна строчка в программе может увеличить срок службы агрегата.
Соединяем контроллер с транзистором правильно
Оставалось только правильно сочленить транзистор с контроллером. Сделал я это несколько не правильно, через оптическую пару, напрямую. Но эта схема прокатывает при работе с низкими напряжениями, при высоких рабочих напряжениях постоянно сгорал затвор транзистора, да и для управления нужен двухтактный драйвер. Нормальная схема приведена ниже. Но тем не менее на один раз схемы с оптической парой хватило, каким-то чудом на тест драйве она работала, а выгорать начала сразу после него. Вот схема «правильного» драйвера, только в моём варианте ещё была развязка оптикой от контроллера. Картинка взята с Drive2:
Несколько интересных моментов
- При старте электродвигатель потребляет в разы больше электричества даже без нагрузки. А при заторможенном во время старта роторе графитовые щётки начинали дымиться.
- В тот момент, когда на машине сгорает транзистор — она начинает ехать сама, ибо батарею от двигателя отделяет только транзистор. Так что введение схем защиты оправдано, если не хочешь бежать за машиной и молиться, чтоб она никого не сбила.
- Двигатель, который я использовал, взят из стиральной машинки. Обороты без нагрузки у него заявлены 14000 — верится слабо, но на шильдике была именно эта цифра. Хотя он прекрасно тянет «с низов».
- Напряжение на батарее проседает, без нагрузки у меня оно было около 150 вольт, под нагрузкой спокойно может быть 140. А если батарея подсевшая то и 130, из-за этого на свежих батареях первые несколько минут машина могла ехать очень хорошо, потом когда батареи тратили где-то 20-30% энергии, то начинался более менее рабочий режим, машина ехала медленнее, медленнее разгонялась, но это было не так заметно. Когда батареи съедали примерно 70% заряда, то езда превращалась в черепаший ход.
- У меня получилось сжечь даже довольно мощный транзистор из-за перенапряжения на его затворе. Для защиты от этого нужно зашунтировать затвор транзистора диодом на + источника питания драйвера транзистора.
- Реле подключались к МК с помощью маломощных транзисторных ключей на небольших полевичках.
В конце концов получилось то, что на видео
Вообще мои опыты с электроприводом начались ещё в школе и я испробовал много разных конструкций, но это самая удачная схема на тот момент. Если материал понравится, то напишу отдельный пост про всю эпопею.

Нередко случается так, что игрушка, моделька, которая работает от электрического моторчика ломается, и неисправным оказывается именно электромоторчик. Что делать если такое случилось, как подчинить маленький электродвигатель самому? Задача это в принципе не сложная. Обычно ломаются в таких двигателях наиболее уязвимые части. Давайте же в этой статье посмотрим, какими бывают основные неисправности в этих мини электрических моторах, и что делать при обнаружении той или иной поломки, дефекта.
Итак, ремонт электромоторчиков для игрушек начинается с нахождение конкретной неисправности. Самой распространённой поломкой таких моторов является место контакта щеток и контактного барабана ротора (движущейся части электродвигателя). Именно эти самые щётки со временем стираются, подгибаются, отходят на некоторое расстояние (не доставая до ротора мини моторчика). После снятие крышки у электромотора сначала смотрим на состояние этих щёток (в моторчиках для игрушек они сделаны из металла, реже из графита). Если видим, что явно с этими щетками что-то не в порядке, исправляем дефект.
Также электромоторчик для игрушек может не работать если его контакты на контактном барабане ротора сильно сместились со своего нормального (ровного, равноудаленного) положения. Бывает даже, что они касаются друг друга, чего точно не должно быть (происходит замыкание обмоток электрического моторчика на роторе). Если это произошло, аккуратно подгибаем контакты на свое нормальное положение. Может быть так, что между этими контактами попался мусор, проводящий ток (маленький кусочек провода, металлическая стружка, притянутая постоянным магнитом и т.д.). Опять же будет короткое замыкание обмоток электромоторчика, что спровоцирует его неисправность. Если нашли мусор, удаляем его.
Менее распространенной, но всё же также встречаемой неисправностью бывает случаи, когда постоянный магнит (что стоит на статоре электромоторчика по сторонам, внутри) смещается относительно своего нормального положения. Это приводит к заклиниванию ротора электрического моторчика. Естественно нужно просто вытащить магнит и снова ровно поставить его на то место, где он должен быть. Такое встречается с новыми Китайскими моторчиками, поскольку в них постоянные магниты крепятся специальной пружиной, что при сильном ударе двигателя может просто вызвать смещение магнитов.
При ремонте электромоторчиков вы также можете обнаружить, что между щетками электродвигателя для игрушек и самыми выходными контактами (что выходят наружу мотора) нет электрического контакта. Он может быть прерван на крышке (внутри), на которой крепятся щетки и контакты. Сначала для уверенности прозвоните тестером, и убедитесь, что контакта нет, а после уже принимайте меры по устранению этого дефекта.
P.S. Ну и совсем редко бывает так, что произошел обрыв самих обмоток на роторе моторчика. Либо по причине плохого качества изоляции медного провода, что намотан на роторе, было вызвано межвитковое короткое замыкание. Тут уж найти такую неисправность будет посложней. Для этого осторожно отпаяйте проводки на роторе (чтобы они были каждый сам по себе и отвечали только за свою обмотку) и мультиметром проверьте сопротивление этих обмоток. Если увидите, что оно не равно между собой, то попробуйте перемотать эту/эти обмотки.

Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
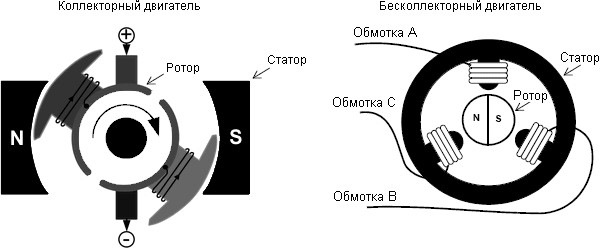
Давайте сначала узнаем, как работает коллекторный двигатель.
Чтобы узнать, почему бесколлекторные двигатели настолько эффективны и имеют высокую мощность, необходимо знать, как работает стандартный коллекторный мотор.
Обычные коллекторные электродвигатели, имеют всего два провода (положительный и отрицательный), которыми двигатель подключается к регулятору скорости. Внутри корпуса двигателя можно увидеть два изогнутых постоянных магнита, а по центру установлен вал с якорем, на котором намотаны обмотки из медной проволоки. С одной стороны вала якоря устанавливается моторная шестерня, с другой стороны вала расположен так называемый коллектор из медных пластин, через который с помощью угольных щеток ток подается к обмоткам якоря.
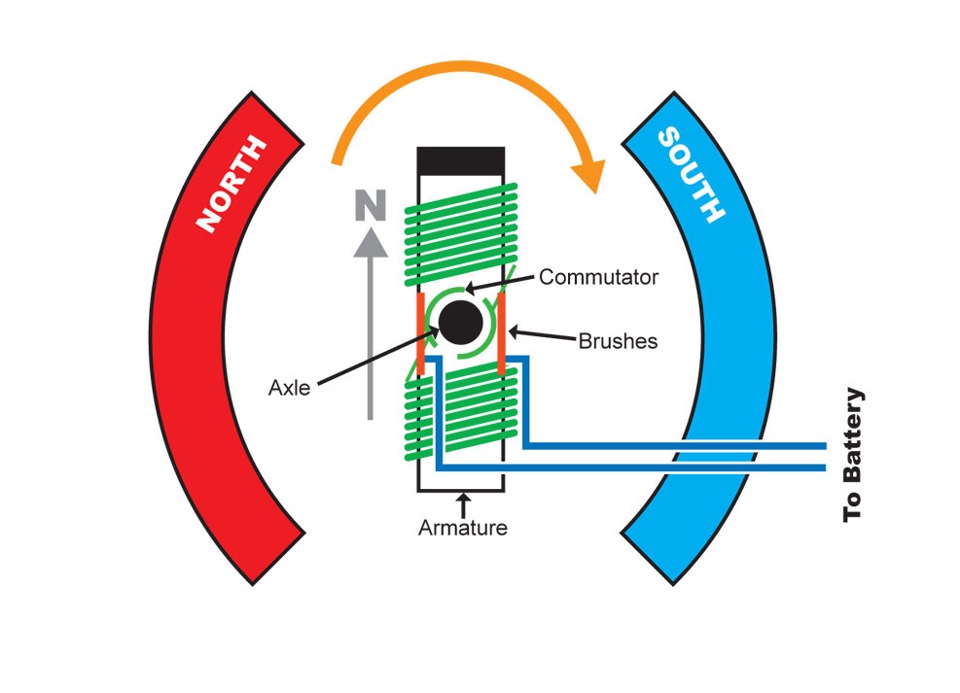
Две угольные щетки постоянно скользят по вращающемуся медному коллектору. Как вы можете видеть на рисунке выше, напряжение по проводам через щетки и коллектор поступает к обмоткам якоря, возникает электромагнитное поле, которое взаимодействует с постоянными магнитами статора и заставляет якорь вращаться.
Как начинает вращаться стандартный коллекторный двигатель.
Когда на обмотки якоря поочередно поступает постоянный электрический ток, в них возникает электромагнитное поле, которое с одной стороны имеет «северный» а с другой «южный» полюс. Поскольку «северный» полюс любого магнита автоматически отталкиваются от «северного» полюса другого магнита, электромагнитное поле одной из обмоток якоря, взаимодействуя с полюсами постоянных магнитов статора, заставляет якорь вращаться. Через коллектор и щетки ток поступает на следующую обмотку якоря, что заставляет якорь вместе с валом мотора продолжать вращение, и так до тех пор, пока к мотору подается напряжение. Как правило, якорь коллекторного мотора имеет три обмотки (три полюса) — это не позволяет двигателю застревать в одном положении.
Недостатки коллекторных двигателей выявляются, когда нужно получить огромное количество оборотов от них. Поскольку щетки должны постоянно находиться в контакте с коллектором, в месте их соприкосновения возникает трение, которое значительно увеличивается, особенно на высоких оборотах. Любой дефект коллектора приводит к значительному износу щеток и нарушению контакта, что в свою очередь снижает эффективность мотора. Именно поэтому серьезные гонщики протачивают и полируют коллектор двигателя и меняют щетки почти после каждого заезда. Коллекторный узел стандартного мотора так же является источником радиопомех и требует особого внимания и обслуживания.
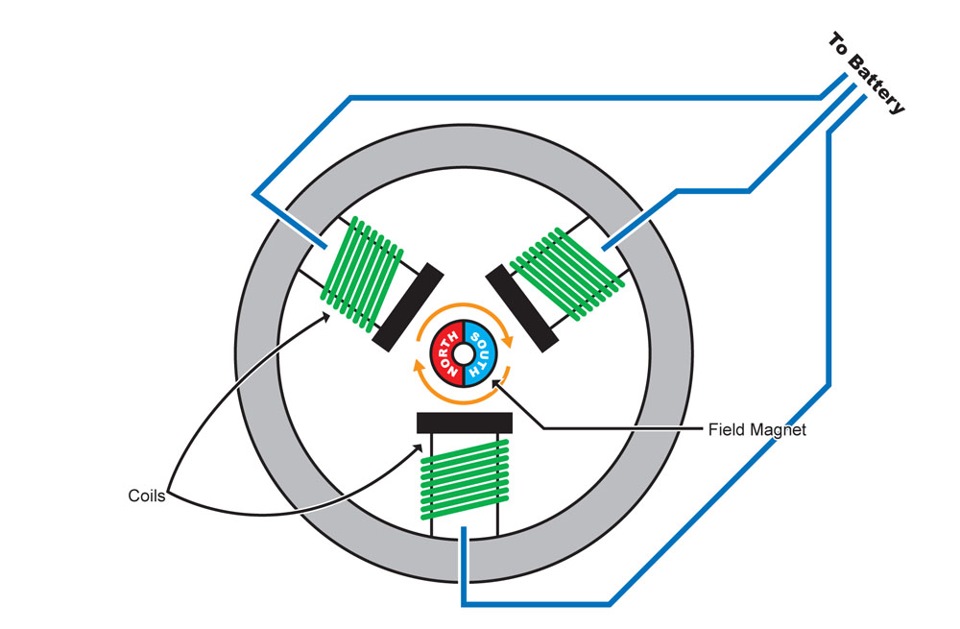
Теперь посмотрим, как работает бесколлекторный двигатель.
Основной особенностью конструкции бесколлекторного двигателя является то, что он по принципу работы похож на коллекторный мотор, но все устроено как бы "наизнанку", и в нем отсутствуют коллектор и щетки. Постоянные магниты, которые в коллекторном моторе установлены на неподвижном статоре, у бесколлекторного мотора расположены вокруг вала, и этот узел называется ротор. Проволочные обмотки бесколлекторного мотора размещены вокруг ротора и имеют несколько различных магнитных полюсов. Датчиковые бесколлекторные моторы имеют на роторе сенсор, который посылает сигналы о положении ротора в процессор электронного регулятора скорости.
Из-за отсутствия коллектора и щеток в бесколлекторном моторе нет изнашивающихся деталей, кроме шарикоподшипников ротора, а это автоматически делает его более эффективным и надежным. Наличие сенсора контроля вращения ротора также значительно повышает эффективность. У коллекторных двигателей не возникает искрения щеток, что резко снижает возникновение помех, а отсутствие узлов с повышенным трением благоприятно сказывается на температуре работающего мотора, что так же повышает его эффективность.
Единственный возможный недостаток бесколлекторной системы – это несколько более высокая стоимость, однако каждый, кто испытал высокую мощность бесколлекторной системы, почувствовал прелесть отсутствия необходимости периодической замены щеток, пружин, коллекторов и якорей, тот быстро оценит общую экономию и не вернется к коллекторным моторам … никогда!
Помимо базовых размеров и различных параметров, бесколлекторные двигатели могут подразделяться по типу: с датчиком и без датчика. Двигатель с датчиком используют очень маленький сенсор на роторе и кроме трех толстых кабелей, по которому мотор получает питание, имеют дополнительный шлейф из тонких проводов, которые соединяют двигатель с регулятором скорости. Дополнительные провода передают информацию с датчика о положении ротора сотни раз в секунду. Эта информация обрабатывается электронным регулятором скорости, что позволяет мотору работать плавно и эффективно, насколько это возможно. Такие моторы используют профессиональные гонщики, однако такие двигатели намного дороже и сложнее в использовании.
Бездатчиковая бесколлекторная система, как можно догадаться, не имеет датчиков и дополнительных проводов, а ротор таких двигателей вращается без точной регистрации его положения и оборотов регулятором скорости. Это позволяет сделать двигатель и регулятор скорости проще в изготовлении, проще в установке и в целом дешевле. Бездатчиковые системы способны обеспечить такую же мощность, как датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное решение для любителей и начинающих спортсменов.
Читайте также: