
Схемы радиоуправления китайских игрушек
Обновлено: 03.05.2024
Принципиальная схема приемника для радиоуправления на 27,12 МГц. Микросхема МС3371 мало чем отличается от предыдущей, но она дешевле. В [16] опубликован неплохой приемник на ее базе. Приведем схему приемника, рассчитанного на работу с входным сигналом частотой 27,12 МГц. .
Схема приемника лазерного излучения
В принципе, в качестве приемника лазерного излучения можно применить и предыдущую схему, если в передатчике использовать генератор поднесущей. Для передатчика, описанного в разделе 3.3, подойдет схема, приведенная ниже. Печатную.
Приемник радиоуправления на микросхеме MC3372 (27,12 МГц)
Схема приемника радиоуправления на микросхеме MC3372, который работает в диапазоне частот 27,12 МГц. Последовательно с антенной включена удлинительная катушка L1, обеспечивающая компенсацию емкостной составляющей укороченной антенны, что благотворно .
Приемник с двойным преобразованием частоты на MC3361P (27,12 МГц)
Принципиальная схема. Предлагается существенно улучшить характеристики приемника, применив две одинаковые микросхемы MC3361P. Выигрыш достигается в основном за счет того, что первая промежуточная частота выбрана достаточно высокой — 10,7 МГц.
Приемник радиоуправления на микросхеме MC3361P (LM3361, KA3361)
Принципиальная схема приемника приведена ниже. Применена далеко не новая, но хорошо себя зарекомендовавшая микросхема MC3361. Ее паспортная чувствительность 2,6 мкВ, однако чувствительность приемника может быть легко улучшена до 0,5 мкВ .
Приемник радиоуправления на микросхеме К147ХА26
Принципиальная схема. Этот приемник имеет чувствительность не хуже 1 мкВ за счет УРЧ, собранного по каскодной схеме. Такое построение каскада обеспечивает высокий устойчивый коэффициент усиления за .
Приемники инфракрасного сигнала на специализированных микросхемах
Приемник радиоуправления на ИМС К174УР7 со смесителем на полевом транзисторе
Схема самодельного КВ приемника для радиоуправления на частоте 27МГц, собран на ИМС К174УР7 со смесителем на полевом транзисторе. Принципиальная схема приемника представляет собой супергетеродин с однократным преобразованием частоты. Гетеродин собран на транзисторе VT1 и никаких особенностей не имеет. Смеситель реализован на двухзатворном полевом транзисторе VT2, нагрузкой которого является.
Приемник прямого преобразования на микросхеме МС2833 (26-32 МГц)
Схема простого самодельного приемника радиоуправления на микросхеме МС2833 для диапазона частот 26-32 МГц. Специализированных микросхем приемников прямого преобразования промышленность почему-то не выпускает. В предлагаемом разделе нетрадиционное использование микросхемы МС2833 фирмы MOTOROLA, предназначенной для .
Приемник радиоуправления на базе микросхемы К157ХА2 (28Мгц)
Принципиальная схема приемника радиоуправления. Приемник предназначен для работы с амплитудно-манипу-лированными сигналами длительностью не менее 0,5 мс. Частота настройки— 28 МГц. Чувствительность при отношении «сигнал/шум», равном 10, не хуже 1 мкВ (10 мкВ без УРЧ). Амплитуда .
Принципиальная схема шифратора на мультивибраторах - микросхемах К564АГ1. Шифратор, собранный по схеме, приведенной ниже, содержит минимальное количество деталей. Тактовый генератор, реализованный на микросхеме DD1 (К561АГ1), полностью аналогичен описанному в разделе 2.3.3. Период повторения тактовых импульсов .
ЧМ Передатчики на микросхеме МС2833 (радиоуправление)
Передатчик реализован на специализированной микросхеме. Рабочая частота — 28 МГц; Мощность передатчика —10 мВт;
Многоканальный шифратор команд на триггерах Шмидта К561ТЛ1
Принципиальная схема. Микросхема представляет собой четверку двухвходовых элементов «И» с инверсией, передаточная характеристика которых имеет петлю гистерезиса. Опыт показывает, что использование в генераторах (вместо K561JIA7) этой микросхемы обеспечивает.
Двухкаскадный ЧМ передатчик (радиоуправление)
Принципиальная схема передатчика не имеет каких-либо особенностей. Частота задающего генератора стабилизирована кварцем ZQ1. Подстраиваемая индуктивность L1 обеспечивает компенсацию ухода частоты колебаний кварцевого резонатора за счет включения.
Многоканальный шифратор на триггерах К561ТВ1
Принципиальная схема экономичного шифратора на базе микросхем, выполненных по технологии КМОП. Ток потребления четырех-канального варианта не превышает 1,7 мА. Его схема приведена на рис. 1. Тактовый генератор собран на элементах DD1.1, DDI.2 по традиционной схеме.
Многоканальный шифратор команд на таймерах КР1006ВИ1
Принципиальная схема многоканального шифратора команд на микросхемах таймерах КР1006ВИ1. Микросхема таймера КР1006ВИ1 является многофункциональным устройством и используется в самых различных радиолюбительских конструкциях. На ее базе удобно реализовы-вать как автоколебательные, так и ждущие мультивибраторы. Длительность импульсов в обоих.
Однотранзисторный ЧМ передатчик для радиоуправления
Принципиальная схема передатчика на одном транзисторе. Ранее отмечалось, что применять для радиоуправления можно только узкополосную ЧМ с девиацией, лежащей в пределах 2—10 кГц. Ширина дискриминационной характеристики ЧМ-приемника обычно выбирается чуть большей. Это означает, что стабильность несущей.
Транзисторный шифратор команд на базе электронных ключей
Принципиальная схема шифратора команд на базе электронных ключей. Ждущие мультивибраторы, на которых собраны формирователи канальных импульсов, можно заменить транзисторными ключами, несколько изменив цепи их запуска. Ниже приведена схема такого двухканального шифратора.
КВ передатчик для радиоуправления мощностью 500 мВт (27МГц)
Принципиальная схема передатчика, который может работать в диапазоне частот 27,12—28,2 МГц. Конкретное значение частоты определяется применяемым кварцем. В задающем генераторе, реализованном на транзисторе VT1, можно использовать кварцы как .
Шифратор на транзисторах со стабилизацией периода повторения
Принципиальная схема шифратора для аппаратуры радиоуправления выполненного на транзисторах. РИсключить взаимное влияние каналов можно лишь стабилизировав период повторения канальных импульсов. В таких схемах командные импульсы формируются ждущими мультивибраторами, а их запуск осуществляется импульсами тактового генератора .
Для работы нам потребуются список деталей:
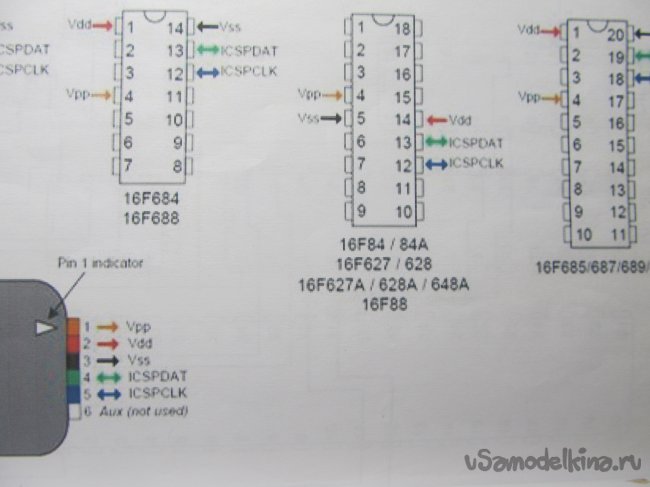
1) PIC16F628A-2 шт (микроконтроллер)
2) MRF49XA-2 шт (радио трансмиттер)
3) Катушка индуктивности 47nH (или намотать самому)-6шт
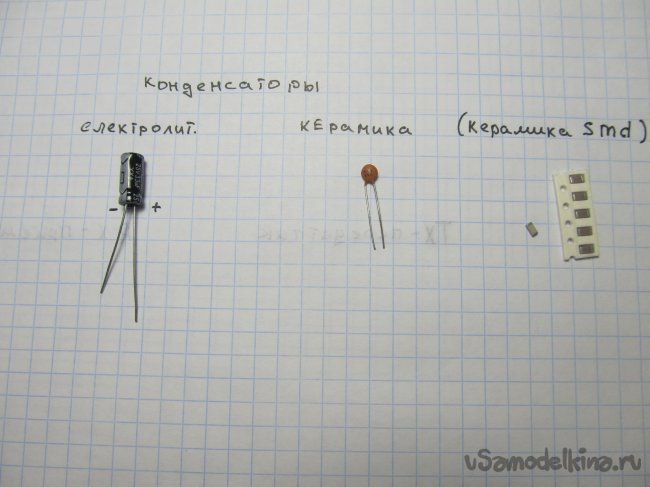
Конденсаторы:
4) 33 мкФ (электролитический)-2 шт
5) 0,1 мкФ-6 шт
6) 4,7 пФ-4 шт
7) 18 пФ-2 шт
Резисторы
8) 100 Ом-1 шт
9) 560 Ом-10 шт
10) 1 Ком-3 шт
11) светодиод-1 шт
12) кнопки-10 шт
13) Кварц 10MHz-2 шт
14) Текстолит
15) Паяльник
Вот схема этого устройства
Передатчик
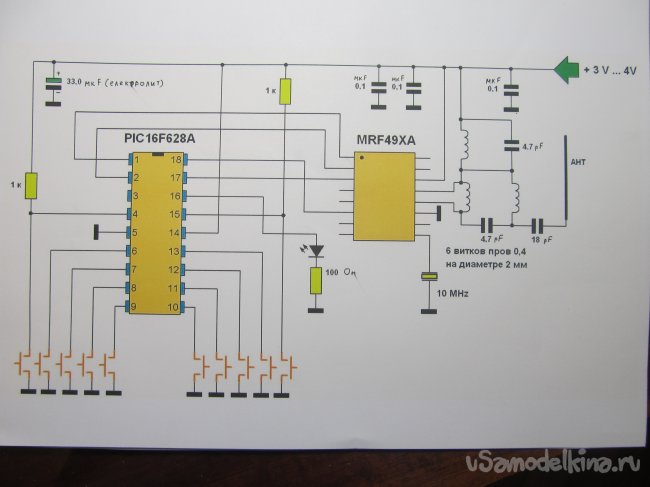
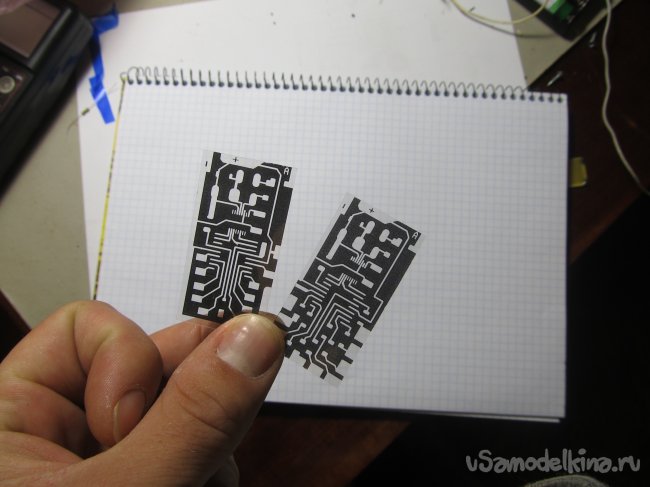
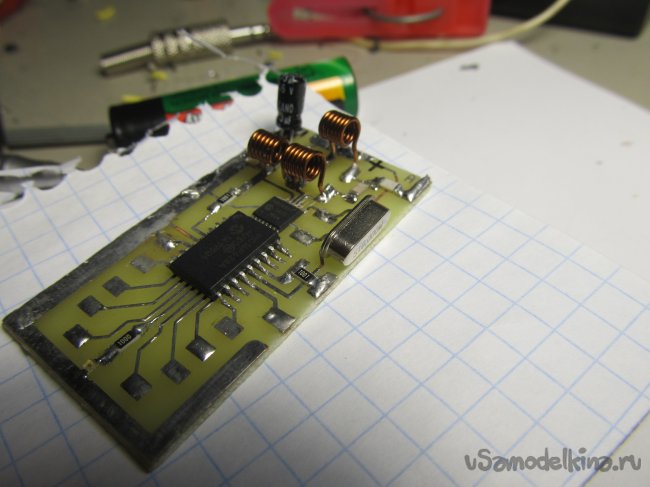
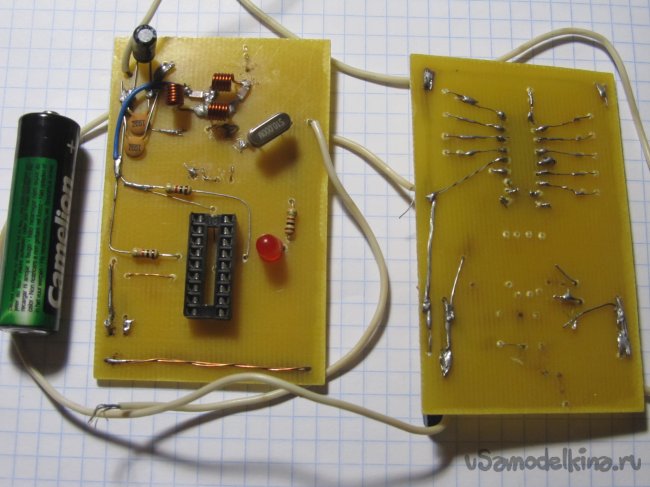
Как видите устройство состоит из минимум деталей и под силу каждому. Стоит только захотеть. Устройство очень стабильное, после сборки работает сразу. Схему можно делать как на печатной плате. Так и навесным монтажом (особенно для первого раза, так будет легче программировать). Для начала делаем плату. Распечатываем

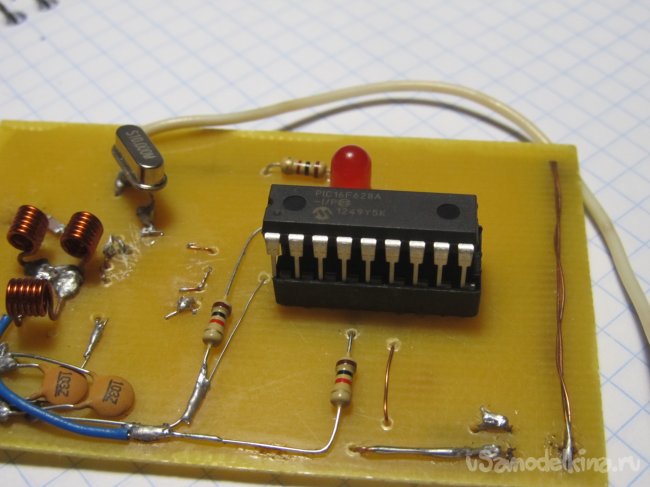
Припаиваем все компоненты, PIC16F628A лучше припаивать самым последним, так как его нужно будет еще запрограммировать. Первым делом припаиваем MRF49XA
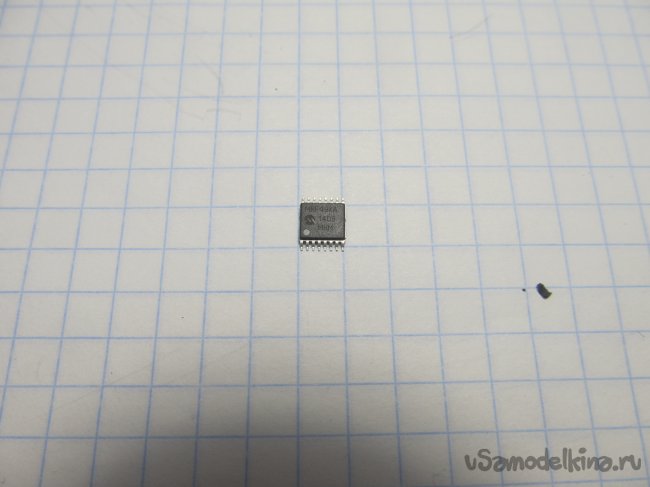
Главное очень аккуратно, у нее очень тонкие выводы. Конденсаторы для наглядности. Самое главное не перепутать полюса на конденсаторе 33 мкФ так как у него выводы разные, один +, другой -. Все остальные конденсаторы припаиваете как хотите у них нет полярности на выводах

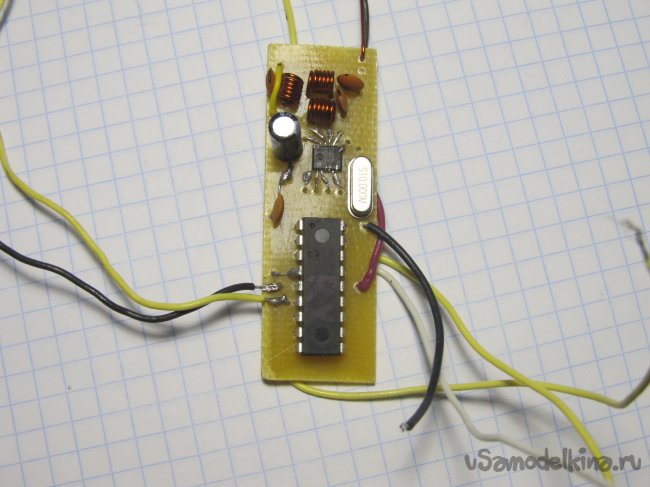
Катушки можно использовать покупные 47nH но лучше намотать самому, все они одинаковые (6 витков провода 0,4 на оправке 2 мм)
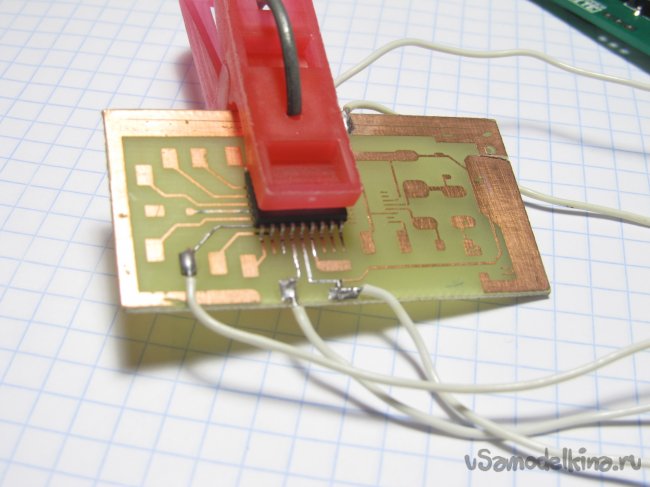
Когда все припаяно, хорошо все проверяем. Далее берем PIC16F628A, его нужно запрограммировать. Я использовал PIC KIT 2 lite и самодельную панельку
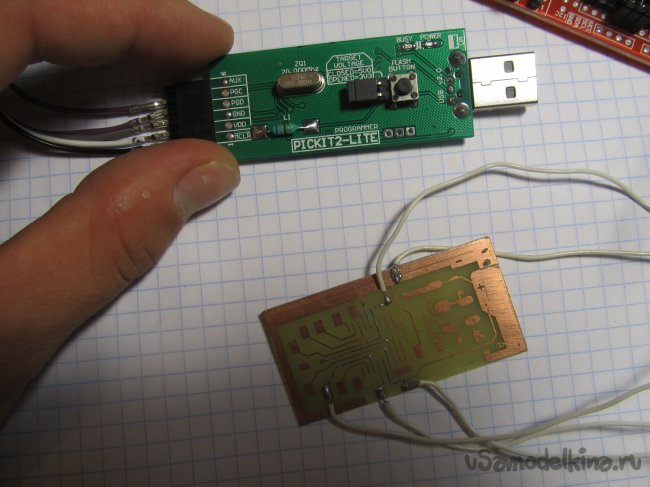
Это все просто, так что не пугайтесь. Для тех кто далек от электроники, советую не начинать с SMD компонентов, а купить все в DIP размере. Я сам так делал в первый раз


Аналогично делам и с другим микроконтроллером.
Файл TX-это для передатчика, а RX - для приемника. Главное потом не перепутать микроконтроллеры. И припаиваем микроконтроллеры на плату. После того как соберете, ни в коем случае не подключайте нагрузку сразу к плате, а то спалите все. Нагрузку к плате следует подключать через мощный транзистор как на фото

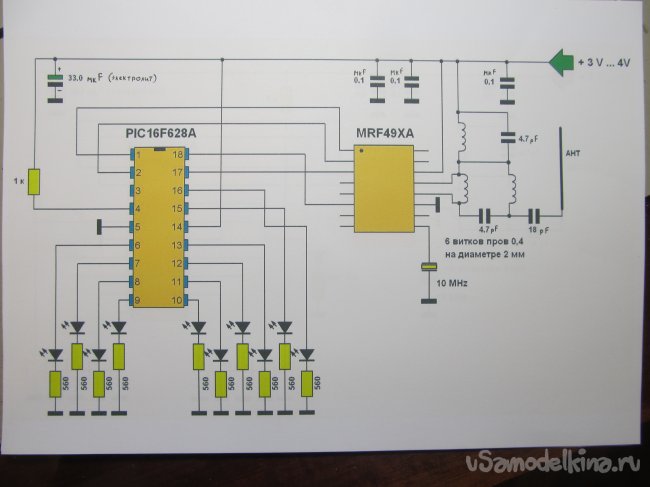
На схеме светодиоды стоят чисто для проверки работоспособности. Если у кого нету программатора тоже обращайтесь, помогу с уже прошитыми микросхемами.
Наверняка у тех, кто имеет детей, накапливается куча старых сломанных игрушек. Где-то отломаны колеса, сломаны пульты. Дети в них уже давно не играют, и все это барахло валяется под ногами.

Дары китайской промышлености
Время от времени мы проводим ревизию игрушек и отбираем те, которые пойдут на разбор.
Внутри типичной китайской игрушки можно найти много полезных деталей:
Один-два мотора с редукторами
NiMh или LiIon аккумуляторы
Имея все эти запчасти и конструктор лего можно увлечь детей конструированием новых игрушек. Приведу пару примеров. Слева моторчик, вклеенный в кубик от лего-дупло. Справа к мотору с мощным редуктором я приклеил платформу от лего.
Тумблер в кубике от лего
Светодиоды оказались необычные. При подаче на них постоянного напряжения они начинают сами мигать разными цветами.
В основной массе китайских игрушек оказались стандартные моторчики, как на картинке выше. Они довольно слабосильные и не могут крутить колеса напрямую. К ним нужен редуктор. Вот, например, небольшой редуктор, сделанный из имеющихся деталей лего-техник. Рядом можно видеть батарейный отсек на платформе от лего.

На Али для таких моторчиков продается готовый редуктор с колесами.
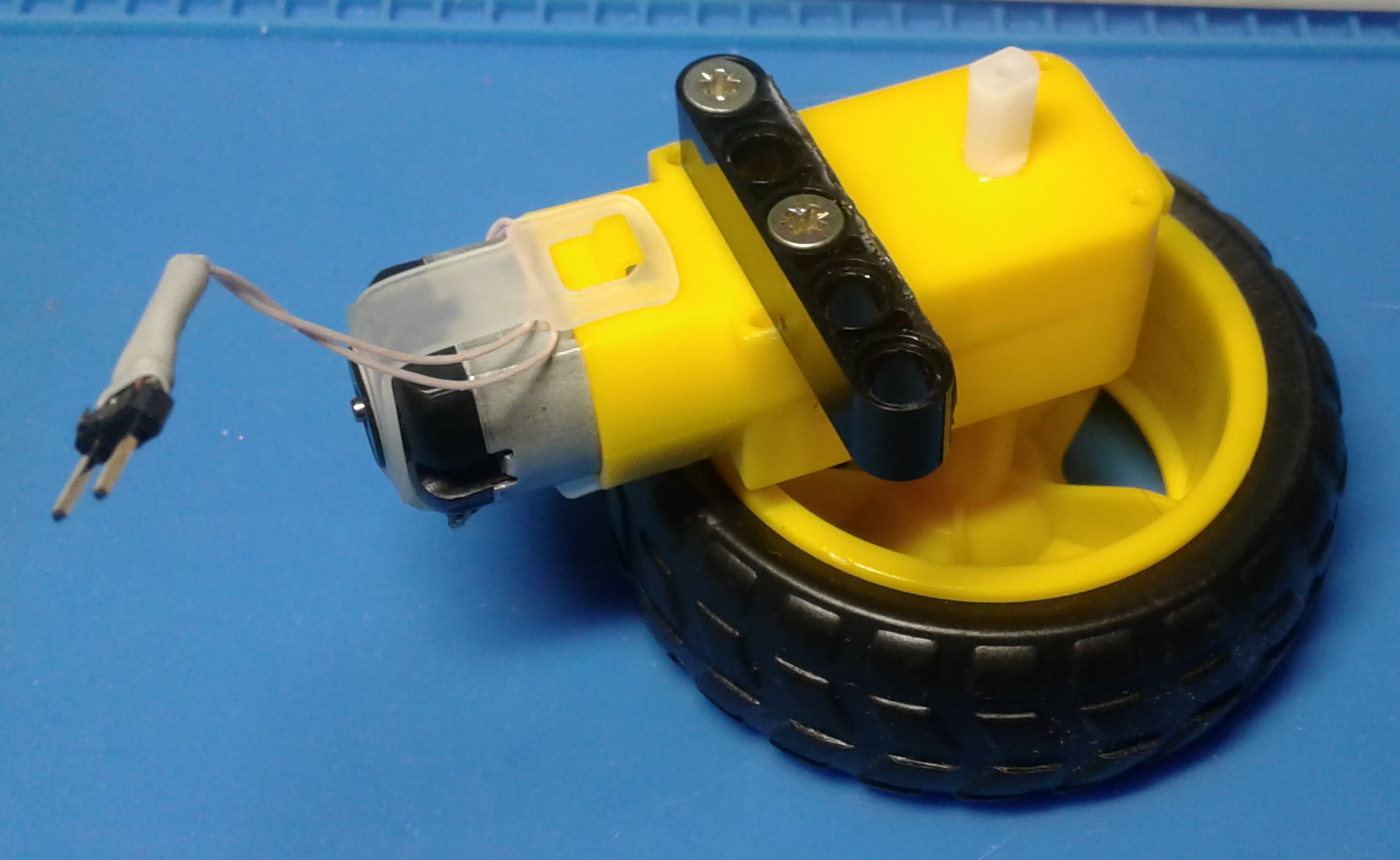
Редуктор с Али
Сгоревший моторчик легко заменяется на запасной. У этого редуктора нет штатных мест крепления, поэтому я прикрутил к нему планку от лего-техник саморезами прямо в корпус.
Отдельного описания заслуживает плата управления. В основной массе китайских игрушек они на 4-5 каналов.
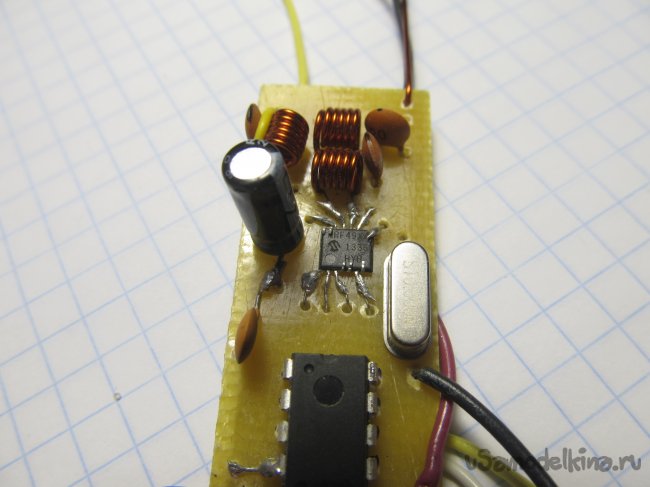
Мне попалась плата на чипе TXM8D423TS. Даташит на этот чип мне найти не удалось, но можно обойтись и без него. Я нашел на этой микросхеме 4 выхода, плюс еще один не распаянный.
На плате есть монтажные точки с надписями F,B,L,R - это выходы вперед, назад, влево, вправо. К ним напрямую можно подключать моторы.
На плате написано 40М, значит, этот приемник работает на частоте 40МГц. Был найден пульт, работающий на 40МГц, но он не смог управлять платой.
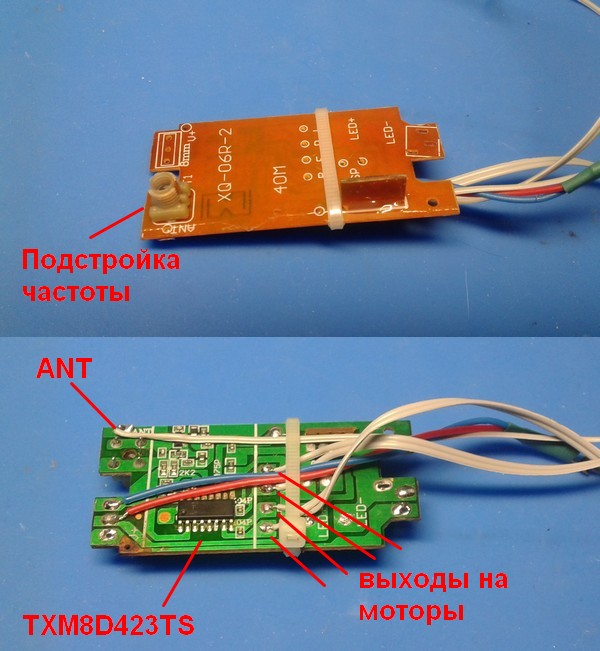
Плата управления
Я предположил, что плата настроена на какую-то неправильную частоту. В углу видна катушка с винтом для подстройки частоты приемника, но для начала надо определить частоту передатчика.
Берем осциллограф. Соединяем кончик щупа с его землей. Получается виток. Этот виток надеваем на антенну пульта, нажимаем на кнопки и видим на экране осциллографа несущую с частотой 40,7 МГц
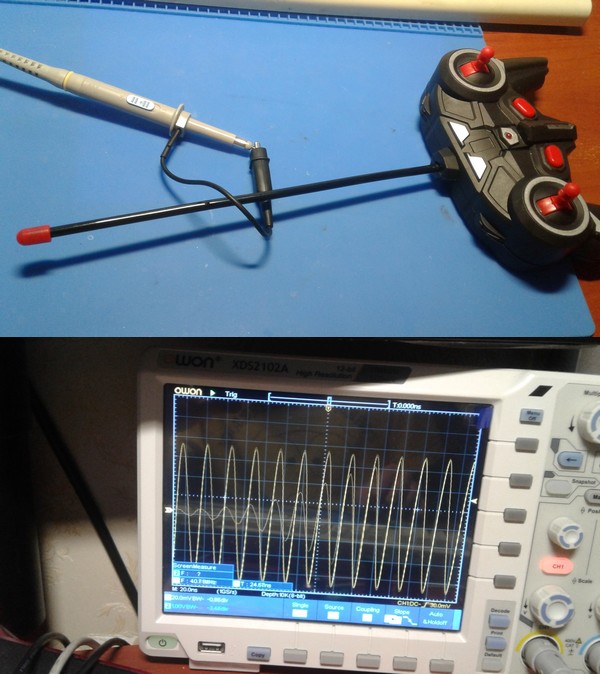
Измерение частоты пульта
Затем внимательно смотрим на плату приемника в районе надпись ANT - это место присоединения антенны. Рядом есть транзистор. Если подать на плату управления питание 5 вольт и взяться щупом за одну из ног транзистора, то тоже можно увидеть какую-то частоту. При этом не обязательно нажимать на пульт. Вращая винт на подстроечной катушке можно получить частоту нашего пульта 40,7 МГц.
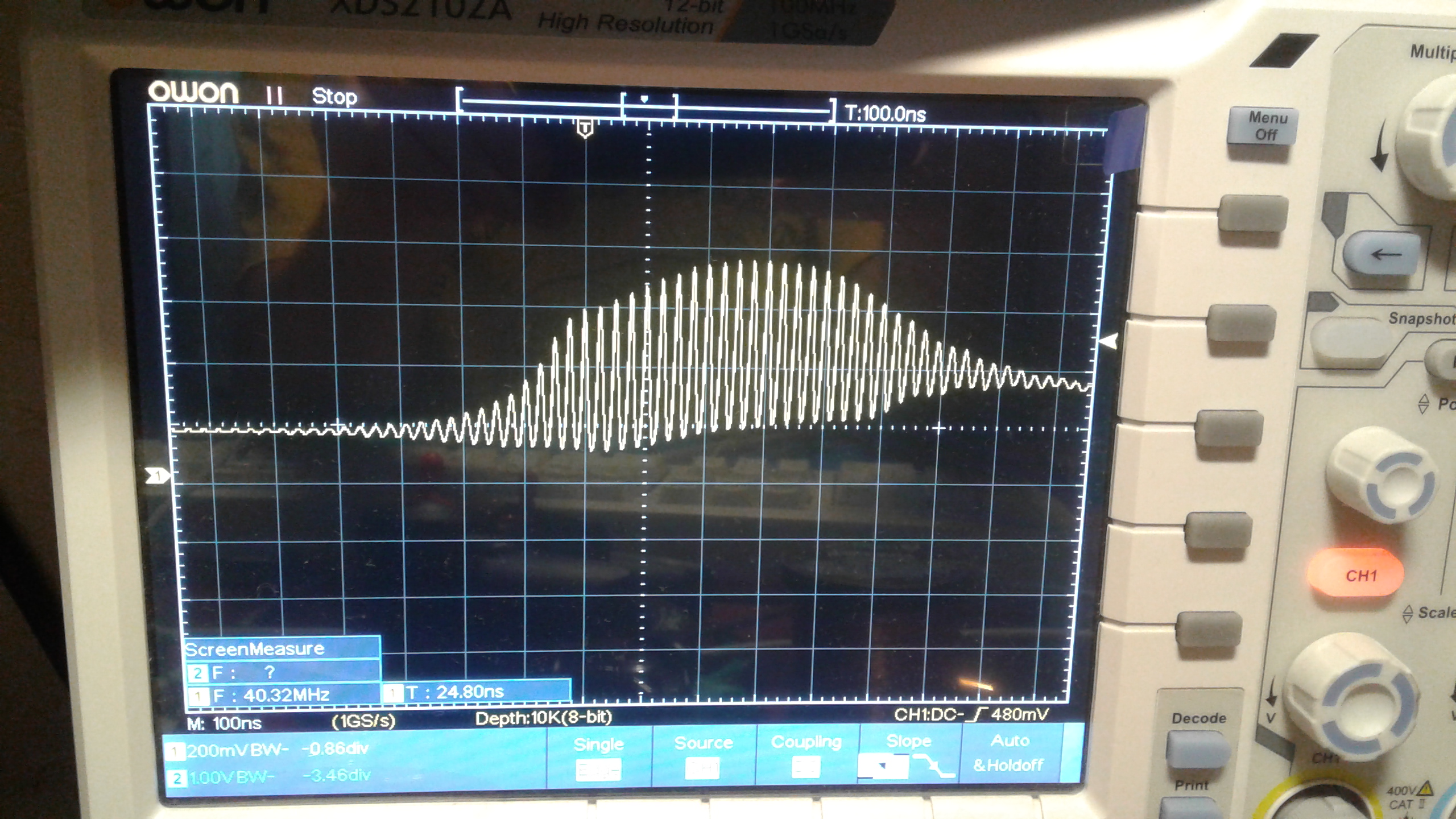
Сигнал на транзисторе рядом с антенной
Как только мы подстроили частоту, выходы F,B,L,R оживают. Изначально на них уровень "0". При нажатии на кнопки пульта на выходах устанавливается уровень питания.
Кстати, о питании. Я на плату управления подавал 8 вольт (2 Li-Ion аккумулятора) и она работала.
В итоге из платы управления и моторчиков дети собрали вот такую машинку на радиоуправлении

Прочитав этот пост загорелся и я идеей склепать свой самолетик. Взял готовые чертежи, заказал у китайцев моторчики, аккумуляторы и пропеллеры. А вот радиоуправление решил сделать самостоятельно, во-первых — так интереснее, во-вторых — надо себя чем-то занять пока посылка с остальными запчастями будет ехать, ну и в третьих — появилась возможность соригинальничать и добавить всяких плюшек.
Осторожно, картинки!
Как и чем управлять

Но ведь у большинства микроконтроллеров есть 16-битный (и больше) таймер для генерации ШИМ. Здесь проблема с дискретностью сразу пропадет еще и частоту можно точно выставить. Долго расписывать не буду, сразу даю табличку:
Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Многоканальное управление
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате. Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс. Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных. То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:
Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:
Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:
Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
затем инициализируем генератор ШИМа на таймере/счетчике1:
Остается реализовать прерывания:
Глобально разрешаем прерывания и готово, забивая в channels значения от LOW до HIGH изменяем значения на каналах.
Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
Спустя некоторое время появилась вот такая платка:
Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается радиомодуль HM-R868:
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через переходник к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться. Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора. С добавлением контрольной суммы в виде XOR слать команды с терминала стало напряжным, поэтому я побыстрому наклепал вот такую программку с ползунками:
Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:
Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот пост и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868. Преобразователь подключается 2м кабелем от принтера, что позволяет закрепить его на каком нибудь дереве или чем-то подобном.
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:

Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:
— проверить правдивость этой версии пока не представляется возможным. В пользу этой версии говорит и зафиксированная на видео попытка выровнять самолет — он летит накрененным, а потом резко заваливается в противоположную сторону (а должен плавно). Вот более наглядное видео:
Дальность действия аппаратуры — примерно 80м, дальше тоже ловит, но через раз.
Ну вот и все, благодарю за внимание. Надеюсь, приведенная информация окажется для кого-то полезной. Буду рад ответить на все вопросы.
В архиве схема и разводка платы для Протеуса.
Читайте также: